CN109520499B - Method for realizing regional real-time isochrones based on vehicle GPS track data - Google Patents
Method for realizing regional real-time isochrones based on vehicle GPS track data Download PDFInfo
- Publication number
- CN109520499B CN109520499B CN201811167355.4A CN201811167355A CN109520499B CN 109520499 B CN109520499 B CN 109520499B CN 201811167355 A CN201811167355 A CN 201811167355A CN 109520499 B CN109520499 B CN 109520499B
- Authority
- CN
- China
- Prior art keywords
- time
- grid
- track data
- vehicle gps
- data
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images
Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/20—Instruments for performing navigational calculations
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S19/00—Satellite radio beacon positioning systems; Determining position, velocity or attitude using signals transmitted by such systems
- G01S19/38—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Computer Networks & Wireless Communication (AREA)
- Automation & Control Theory (AREA)
- Position Fixing By Use Of Radio Waves (AREA)
- Navigation (AREA)
Abstract
The invention discloses a method for realizing regional real-time isochrone based on vehicle GPS track data, which comprises the following steps: collecting vehicle GPS track data in a designated area, and screening and preprocessing the vehicle GPS track data; selecting a distance value M, and gridding the specified area; filling corresponding speed for each grid according to vehicle GPS track data; calculating the running time between any two intersections in the specified area according to the fact that each grid is an intersection; the method has the characteristics that the driving path of the taxi is extracted by utilizing the GPS data of the taxi, the travel time between each grid pair is calculated by combining the shortest path algorithm, and the travel time is used as the evaluation basis of the accessibility.
Description
Technical Field
The invention relates to the technical field of accessibility of traffic areas, in particular to a method for realizing real-time regional isochrones based on vehicle GPS track data.
Background
The method is characterized in that urban spatial information is expressed in a digital mode, optimal decision support is provided for daily requirements of intelligent transportation, dynamic navigation, logistics distribution and the like, the method is a hotspot problem of current digital urban related research and information service application, and accessibility is used as a main spatial factor in the hotspot problem research and is a decisive factor of spatial behavior and spatial decision. Reachability is used to describe how easily people can arrive at a destination from a location using a particular transportation system. As a basic index reflecting traffic cost, the accessibility is widely applied to the research fields of urban traffic planning, time geography, traffic transportation economics and the like.
In cities, the accessibility tends to be different for different directions of travel. Therefore, it is necessary to analyze the reachability in a time-division direction, a direction, in consideration of the travel direction in the reachability study. The space-time accessibility is a method for researching the reachable space-time range under specific space-time constraint by comprehensively considering space factors and time factors from the individual perspective, and the method combines the concept of GIS technology and time geography to research the accessibility of a traffic network. The isochrone is a reachability analysis method based on a road network, is used for representing a connecting line which starts from a starting point and passes through all reachable points under the same space-time constraint, generates characteristics and traffic conditions of the road network to be analyzed, and can reflect a reachability rule in form.
With the rapid development of the urbanization process of China, a large number of people are rushed into cities, so that the size of the cities is continuously enlarged, and the urban traffic demand is increased dramatically. Meanwhile, due to the improvement of social and economic levels, the quantity of motor vehicles in China is increased sharply, and the proportion of motorized trips is increased continuously, so that the urban traffic problem is increasingly prominent, and particularly the traffic jam in large cities is very serious.
Traffic jam causes vehicles on roads to be incapable of driving at the designed speed, and the actual traffic speed is often lower than the designed speed per hour. The use of design time rates can bias the estimation of reachability.
With the continuous development of wireless positioning and communication technology, the floating car based on the GPS can realize all-weather and large-range dynamic traffic information acquisition, so that the accessibility research of the actual traffic condition of the road becomes possible. At present, floating car GPS data is widely applied to the field of traffic and urban research, such as automatic traffic accident monitoring, road network operation efficiency monitoring, human trip behavior analysis, estimation of road traffic time and the like.
In the conventional research on traffic accessibility, due to the limitation of technical conditions, most of the research focuses on theoretical analysis, and the results cannot be displayed intuitively in a graph mode, so that the application of the traffic accessibility analysis results in city planning is difficult.
Disclosure of Invention
The invention aims to overcome the defect of deviation caused by estimation of reachability by using designed speed per hour in the prior art, and provides a method for realizing regional real-time isochrone based on vehicle GPS track data.
In order to achieve the purpose, the invention adopts the following technical scheme:
a method for realizing regional real-time isochrone based on vehicle GPS track data comprises the following steps:
(1-1) vehicle GPS track data in a specified area is collected, and the vehicle GPS track data is screened and preprocessed;
(1-2) selecting a distance value M, and meshing the specified area;
(1-3) filling corresponding speed for each grid according to vehicle GPS track data;
(1-4) calculating the driving time between any two intersections in the specified area according to each grid as one intersection;
(1-5) 5 specified time points T are given1,T2,T3,T4,T5Calculating boundary points which start from each intersection and arrive at the appointed time point;
(1-6) connecting the boundary points on each time point to obtain the isochrones of each intersection at each time point, cleaning the boundary points with serious inward concavity in the isochrones, and finally obtaining the isochrones of each intersection at 5 specified time points.
The method extracts the driving path of the taxi by using the GPS data of the taxi, calculates the travel time between each grid pair by combining the shortest path algorithm, and obtains the isochrones and the rendering map thereof according to the travel time as the evaluation basis of accessibility, and the effect is in line with the reality.
Preferably, (1-1) comprises the steps of:
the longitude of the designated area is located at [ lo1,lo2]Interval, latitude is located in [ la1,la2]In the interval, each vehicle GPS track data comprises a field license plate number car _ id, a position longitude lo, a position latitude la, a time and a current vehicle speed; and sequencing the vehicle GPS track data of each vehicle according to the time sequence to form an independent track line.
Preferably, (1-2) comprises the steps of:
dividing the designated area according to the side length M to generate a plurality of squares with the same side length M, wherein the number of each square is the position of the longitude and latitude of the lower left corner of the square and is marked as j × len (lo _ list) + i, wherein j is the position of the latitude, i is the position of the longitude, and the len (lo _ list) designates the number of copies obtained after the area is divided according to the side length M along the longitude direction.
Preferably, (1-3) comprises the steps of:
and traversing the route data of each vehicle track, finding out the grid number of the start point longitude and latitude and the grid number of the end point longitude and latitude of the route for the data in the specified area, and inserting the current vehicle speed of the route track data into all grids in a matrix formed by two diagonal grids.
Preferably, (1-4) comprises the steps of:
regarding each grid as an intersection, and regarding the longitude and latitude of the left lower corner of the grid as the longitude and latitude of the intersection; calculating the distance dist and the azimuth angle between the lower left corners of any two grids, wherein the angle is the included angle between the connecting line of the lower left corners of the two grids and the due north direction;
and sequencing the current vehicle speed in all small grids contained in a matrix where a diagonal formed by the two grids is located to obtain a current vehicle speed sequence, taking a numerical value v of the current vehicle speed arranged at the middle position in the current vehicle speed sequence, and calculating by utilizing a formula dist/v to obtain the running time between the two grids.
Preferably, (1-5) comprises the steps of:
selecting a specified time point TiData in the range, i ═ 1, 2.., 5; dividing data with the same intersection as a starting point into a group for discussion, and regarding each group of data, centering on the starting point, and dividing the data into a specified azimuth angle a1Is divided into Selecting the intersection farthest from the starting point in each group, and taking the intersection farthest from the starting point as a time point TiGiving the obtained boundary points to the serial number in the clockwise direction if the direction difference between two adjacent boundary points is more than a2And adding a starting point between two adjacent boundary points as a boundary point, and reordering.
Selecting the intersection farthest from the starting point in each group, and taking the intersection farthest from the starting point as a time point TiGiving the obtained boundary points to the serial number in the clockwise direction if the direction difference between two adjacent boundary points is more than a2And adding a starting point between two adjacent boundary points as a boundary point, and reordering.
Preferably, (1-6) comprises the steps of:
cleaning for the first time: deleting TiThe inner three-point connecting line is in a concave state and has an included angle less than a3A medially located boundary point of degrees;
and (3) cleaning for the second time: deleting each current time T of each starting pointiAt a small time Ti-1,Ti-2,…,T1Boundary points within the range and at the same time deleting the boundary points at a larger time point Ti+1,Ti+2,…,T5Upper repeating boundary points.
Preferably, for the lattice pairs without paths, the shortest path in the lattice pair information with all paths is divided by the corresponding travel time, the corresponding speed values are calculated, all the obtained speed values are sorted to obtain a speed value sequence, a median value w in the speed value sequence is taken as the speed value between the grids with missing speed, and the travel time between the lattice pairs without paths is the shortest path divided by w.
The travel time is calculated according to the time corresponding to two grids of the grid pair on the vehicle GPS track data.
Preferably, the shortest path is obtained by using a Floyd-Warshall algorithm:
let Di1,j1,kFrom lattice i1 to lattice j1The length of the shortest path with only the nodes in the {1, 2., k } set as intermediate nodes, if the shortest path passes through the lattice k, D isi1,j1,k=Di1,k,k-1+Dk,j1,k-1,
Otherwise Di1,j1,k=Di1,j1,k-1Thus Di1,j1,k=min{Di1,j1,k-1,Di1,k,k-1+Dk,j1,k-1}。
Therefore, the invention has the following beneficial effects: the driving path of the taxi is extracted by utilizing GPS data of the taxi, the travel time between each grid pair is calculated by combining a shortest path algorithm and is used as an evaluation basis of the accessibility, and an isochrone and a rendering graph thereof are obtained according to the travel time, so that the effect is in line with the reality, and the analysis of the traffic accessibility is facilitated.
Drawings
FIG. 1 is a flow chart of the present invention;
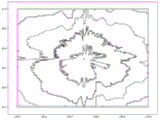
FIG. 2 is a graphical illustration of a zone result of the present invention.
Detailed Description
The invention is further described with reference to the following figures and detailed description.
As shown in fig. 1, a method for implementing real-time regional isochrone based on vehicle GPS track data includes the following steps:
collecting vehicle GPS track data with longitude in the range of [120.5, 121.0] and latitude in the range of [30.5, 31.0], and sequencing the GPS track data of each vehicle according to time to form an independent track line;
selecting a reasonable distance value M which is 500M, meshing areas with longitudes at [120.5, 121.0] and latitudes at [30.5, 31.0], wherein each grid corresponds to one number;
according to the vehicle GPS line track data in the step 100, finding out the grid number where the starting point longitude and latitude and the grid number where the finishing point longitude and latitude are, and inserting all grids in a matrix formed by two opposite angle grids into the current vehicle speed of the line track data;
regarding the gridded area, each grid is regarded as an intersection, and the longitude and latitude of the left lower corner of the grid are regarded as the longitude and latitude of the intersection. Calculating the distance dist between any two lattices, and calculating the azimuth angle, wherein the angle is the included angle between the connecting line of the left lower corners of the two lattices and the due north direction, and the dist distance is calculated by adopting the Euclidean distance.
And sequencing the current vehicle speed in all small grids contained in a matrix where a diagonal formed by the two grids is located to obtain a current vehicle speed sequence, taking a numerical value v of the current vehicle speed arranged at the middle position in the current vehicle speed sequence, and calculating by utilizing a formula dist/v to obtain the running time between the two grids.
Wherein, the shortest path is obtained by using Floyd-Warshall algorithm:
let Di1,j1,kIf the shortest path is the length of the shortest path from grid i1 to grid j1 with only nodes in the {1, 2., k } set as intermediate nodes, then D is the length of the shortest path through grid ki1,j1,k=Di1,k,k-1+Dk,j1,k-1,
Otherwise Di1,j1,k=Di1,j1,k-1Thus Di1,j1,k=min{Di1,j1,k-1,Di1,k,k-1+Dk,j1,k-1}。
As shown in FIG. 2, a schematic diagram of the result of the region is obtained, wherein the point in the middle of FIG. 2 is an intersection, and the 4 isochrones around the intersection are T with the intersection as the starting point 1200 seconds, T 2400 seconds, T 3600 seconds, T4The invention can visually display the isochrones in a graph mode, which is 800 seconds of isochrones and is beneficial to analyzing the traffic accessibility.
It should be understood that this example is for illustrative purposes only and is not intended to limit the scope of the present invention. Further, it should be understood that various changes or modifications of the present invention may be made by those skilled in the art after reading the teaching of the present invention, and such equivalents may fall within the scope of the present invention as defined in the appended claims.
Claims (9)
1. A method for realizing regional real-time isochrone based on vehicle GPS track data is characterized by comprising the following steps:
(1-1) vehicle GPS track data in a specified area is collected, and the vehicle GPS track data is screened and preprocessed;
(1-2) selecting a distance value M, and meshing the specified area;
(1-3) filling corresponding speed for each grid according to vehicle GPS track data;
(1-4) calculating the driving time between any two intersections in the specified area according to each grid as one intersection;
(1-5) 5 specified time points T are given1,T2,T3,T4,T5Calculating boundary points which start from each intersection and arrive at the appointed time point;
(1-6) connecting the boundary points on each time point to obtain the isochrones of each intersection at each time point, cleaning the boundary points with serious inward concavity in the isochrones, and finally obtaining the isochrones of each intersection at 5 specified time points.
2. The method for implementing regional real-time isochrone based on vehicle GPS track data as claimed in claim 1, wherein (1-1) comprises the steps of:
the longitude of the designated area is located at [ lo1,lo2]Interval, latitude is located in [ la1,la2]In the interval, each vehicle GPS track data comprises a field license plate number car _ id, a position longitude lo, a position latitude la, a time and a current vehicle speed; and sequencing the vehicle GPS track data of each vehicle according to the time sequence to form an independent track line.
3. The method for implementing regional real-time isochrone based on vehicle GPS track data as claimed in claim 1, wherein (1-2) comprises the steps of:
dividing the designated area according to the side length M to generate a plurality of squares with the same side length M, wherein the number of each square is the position of the longitude and latitude of the lower left corner of the square and is marked as j × len (lo _ list) + i, wherein j is the position of the latitude, i is the position of the longitude, and the len (lo _ list) designates the number of copies obtained after the area is divided according to the side length M along the longitude direction.
4. The method for implementing regional real-time isochrone based on vehicle GPS track data as claimed in claim 1, wherein (1-3) comprises the steps of:
and traversing the route data of each vehicle track, finding out the grid number of the start point longitude and latitude and the grid number of the end point longitude and latitude of the route for the data in the specified area, and inserting the current vehicle speed of the route track data into all grids in a matrix formed by two diagonal grids.
5. The method for implementing regional real-time isochrone based on vehicle GPS track data as claimed in claim 1, wherein (1-4) comprises the steps of:
regarding each grid as an intersection, and regarding the longitude and latitude of the left lower corner of the grid as the longitude and latitude of the intersection; calculating the distance dist and the azimuth angle between the lower left corners of any two grids, wherein the angle is the included angle between the connecting line of the lower left corners of the two grids and the due north direction;
and sequencing the current vehicle speed in all small grids contained in a matrix where a diagonal formed by the two grids is located to obtain a current vehicle speed sequence, taking a numerical value v of the current vehicle speed arranged at the middle position in the current vehicle speed sequence, and calculating by utilizing a formula dist/v to obtain the running time between the two grids.
6. The method for implementing regional real-time isochrone based on vehicle GPS track data as claimed in claim 1, wherein (1-5) comprises the steps of:
selecting a specified time point TiData in the range, i ═ 1, 2.., 5; dividing data with the same intersection as a starting point into a group for discussion, and regarding each group of data, centering on the starting point, and dividing the data into two groupsSpecified azimuth a1Is divided into Selecting the intersection farthest from the starting point in each group, and taking the intersection farthest from the starting point as a time point TiGiving the obtained boundary points to the serial number in the clockwise direction if the direction difference between two adjacent boundary points is more than a2And adding a starting point between two adjacent boundary points as a boundary point, and reordering.
Selecting the intersection farthest from the starting point in each group, and taking the intersection farthest from the starting point as a time point TiGiving the obtained boundary points to the serial number in the clockwise direction if the direction difference between two adjacent boundary points is more than a2And adding a starting point between two adjacent boundary points as a boundary point, and reordering.
7. The method for implementing regional real-time isochrone based on vehicle GPS trajectory data as claimed in claim 1, 2, 3, 4, 5 or 6, wherein (1-6) comprises the steps of:
cleaning for the first time: deleting TiThe inner three-point connecting line is in a concave state and has an included angle less than a3A medially located boundary point of degrees;
and (3) cleaning for the second time: deleting each current time T of each starting pointiAt a small time Ti-1,Ti-2,…,T1Boundary points within the range and at the same time deleting the boundary points at a larger time point Ti+1,Ti+2,…,T5Upper repeating boundary points.
8. The method as claimed in claim 5, wherein for the grid pairs without paths, the shortest path in the grid pair information with all paths is divided by the corresponding travel time to calculate the corresponding speed value, all the obtained speed values are sorted to obtain the speed value sequence, the median value w in the speed value sequence is taken as the speed value between the missing speed grids, and the travel time between the grid pairs without paths is the shortest path divided by w.
9. The method for implementing regional real-time isochrones based on vehicle GPS trajectory data as claimed in claim 8, wherein the shortest path is obtained using Floyd-Warshall algorithm:
let Di1,j1,kIf the shortest path is the length of the shortest path from grid i1 to grid j1 with only nodes in the {1, 2., k } set as intermediate nodes, then D is the length of the shortest path through grid ki1,j1,k=Di1,k,k-1+Dk,j1,k-1,
Otherwise Di1,j1,k=Di1,j1,k-1Thus Di1,j1,k=min{Di1,j1,k-1,Di1,k,k-1+Dk,j1,k-1}。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201811167355.4A CN109520499B (en) | 2018-10-08 | 2018-10-08 | Method for realizing regional real-time isochrones based on vehicle GPS track data |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201811167355.4A CN109520499B (en) | 2018-10-08 | 2018-10-08 | Method for realizing regional real-time isochrones based on vehicle GPS track data |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN109520499A CN109520499A (en) | 2019-03-26 |
| CN109520499B true CN109520499B (en) | 2020-06-26 |
Family
ID=65772246
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201811167355.4A Active CN109520499B (en) | 2018-10-08 | 2018-10-08 | Method for realizing regional real-time isochrones based on vehicle GPS track data |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN109520499B (en) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110334861B (en) * | 2019-06-27 | 2021-08-27 | 四川大学 | Urban area division method based on trajectory data |
| CN111210612B (en) * | 2019-10-29 | 2021-01-19 | 浙江浙大中控信息技术有限公司 | Method for extracting bus route track based on bus GPS data and station information |
| CN112017436B (en) * | 2020-09-09 | 2021-09-28 | 中国科学院自动化研究所 | Method and system for predicting urban traffic travel time |
| CN114661848A (en) * | 2022-03-21 | 2022-06-24 | 阿里云计算有限公司 | Route processing method and device in electronic map |
| CN116311914B (en) * | 2023-02-21 | 2024-06-11 | 华南理工大学 | Estimation method of isochronal eigenvalues of discrete points on road lines for traffic isochrones |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN1796942A (en) * | 2004-12-21 | 2006-07-05 | 厦门雅迅网络股份有限公司 | Method for calculating route of navigating cities |
| CN106504523A (en) * | 2015-09-06 | 2017-03-15 | 阿里巴巴集团控股有限公司 | A method and device for generating traffic isochrone information |
| CN107291937A (en) * | 2017-07-05 | 2017-10-24 | 武汉大学 | A kind of isochronal method for visualizing of point of interest POI trips |
| CN107609682A (en) * | 2017-08-22 | 2018-01-19 | 上海世脉信息科技有限公司 | Population agglomeration middle or short term method for early warning under a kind of big data environment |
| CN108520354A (en) * | 2018-04-09 | 2018-09-11 | 江苏省城镇化和城乡规划研究中心 | A kind of compound analysis method of reachability of multiple spot traffic |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6668226B2 (en) * | 2001-10-11 | 2003-12-23 | Microsoft Corporation | Polar coordinate-based isochrone generation |
-
2018
- 2018-10-08 CN CN201811167355.4A patent/CN109520499B/en active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN1796942A (en) * | 2004-12-21 | 2006-07-05 | 厦门雅迅网络股份有限公司 | Method for calculating route of navigating cities |
| CN106504523A (en) * | 2015-09-06 | 2017-03-15 | 阿里巴巴集团控股有限公司 | A method and device for generating traffic isochrone information |
| CN107291937A (en) * | 2017-07-05 | 2017-10-24 | 武汉大学 | A kind of isochronal method for visualizing of point of interest POI trips |
| CN107609682A (en) * | 2017-08-22 | 2018-01-19 | 上海世脉信息科技有限公司 | Population agglomeration middle or short term method for early warning under a kind of big data environment |
| CN108520354A (en) * | 2018-04-09 | 2018-09-11 | 江苏省城镇化和城乡规划研究中心 | A kind of compound analysis method of reachability of multiple spot traffic |
Non-Patent Citations (2)
| Title |
|---|
| 基于交通等时线的城市商圈识别及交通要素研究;吴忠才 等;《商学研究》;20180630;第25卷(第3期);第62-70页 * |
| 等时线模型支持下的路网可达性分析;何亚坤 等;《测绘学报》;20141130;第43卷(第11期);第1190-1196页 * |
Also Published As
| Publication number | Publication date |
|---|---|
| CN109520499A (en) | 2019-03-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN109520499B (en) | Method for realizing regional real-time isochrones based on vehicle GPS track data | |
| US11544950B2 (en) | Method and apparatus for updating road map geometry based on received probe data | |
| US10502577B2 (en) | Iterative map learning based on vehicle on-board sensor data | |
| US10140854B2 (en) | Vehicle traffic state determination | |
| EP3901782B1 (en) | Lane-centric road network model for navigation | |
| US11692837B2 (en) | Automatic discovery of optimal routes for flying cars and drones | |
| US9257042B2 (en) | Learning road feature delay times based on aggregate driver behavior | |
| US10580292B2 (en) | Lane-level geometry and traffic information | |
| JP5649726B2 (en) | How to determine cross-failure information | |
| US11237007B2 (en) | Dangerous lane strands | |
| CN112991743B (en) | Real-time traffic risk AI prediction method based on driving path and system thereof | |
| US20190325738A1 (en) | Lane-level geometry and traffic information | |
| CN100357987C (en) | Method for obtaining average speed of city rode traffic low region | |
| CN105679009B (en) | A kind of call a taxi/order POI commending systems and method excavated based on GPS data from taxi | |
| CN102663887A (en) | Road traffic information cloud computing and cloud service implementation system and method based on Internet of Things technology | |
| CN106197460A (en) | A kind of method that the GPS of application trip data is predicted with carrying out trip purpose | |
| WO2018011222A1 (en) | Map having computer executable instructions embedded therein | |
| CN102956105B (en) | Floating car sample point data interpolation method | |
| CN112183871B (en) | Urban traffic guidance system based on air index | |
| Cathey et al. | Estimating corridor travel time by using transit vehicles as probes | |
| EP3617651B1 (en) | Use of a geographic database comprising lane level information for traffic parameter prediction | |
| CN112905856A (en) | Method for constructing high-speed traffic data set with space-time dependence | |
| Bajracharya et al. | Urban intersection modelling for signal coordination and adaptive traffic control under heterogeneous traffic condition: A case study of Keshar Mahal and Durbar Marg intersections | |
| CN112212877A (en) | Internet of things unmanned vehicle and navigation path calculation method and device | |
| CN105825670B (en) | Method and system for road oversaturation judgment based on data fusion |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant | ||
| CP01 | Change in the name or title of a patent holder | ||
| CP01 | Change in the name or title of a patent holder |
Address after: 310053 23-25, 2 building, 352 BINKANG Road, Binjiang District, Hangzhou, Zhejiang. Patentee after: Zhejiang zhongkong Information Industry Co.,Ltd. Address before: 310053 23-25, 2 building, 352 BINKANG Road, Binjiang District, Hangzhou, Zhejiang. Patentee before: ZHEJIANG SUPCON INFORMATION TECHNOLOGY Co.,Ltd. |