CN109520499B - 基于车辆gps轨迹数据实现区域实时等时线的方法 - Google Patents
基于车辆gps轨迹数据实现区域实时等时线的方法 Download PDFInfo
- Publication number
- CN109520499B CN109520499B CN201811167355.4A CN201811167355A CN109520499B CN 109520499 B CN109520499 B CN 109520499B CN 201811167355 A CN201811167355 A CN 201811167355A CN 109520499 B CN109520499 B CN 109520499B
- Authority
- CN
- China
- Prior art keywords
- time
- grid
- track data
- vehicle gps
- data
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images
Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/20—Instruments for performing navigational calculations
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S19/00—Satellite radio beacon positioning systems; Determining position, velocity or attitude using signals transmitted by such systems
- G01S19/38—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Computer Networks & Wireless Communication (AREA)
- Automation & Control Theory (AREA)
- Position Fixing By Use Of Radio Waves (AREA)
- Navigation (AREA)
Abstract
本发明公开了一种基于车辆GPS轨迹数据实现区域实时等时线的方法,包括如下步骤:采集指定区域内的车辆GPS轨迹数据,对车辆GPS轨迹数据进行筛选、预处理;选择距离值M,对指定区域进行网格化;根据车辆GPS轨迹数据,为每个网格化后的格子填充对应的速度;视每个格子为一个路口,计算指定区域内的任意两个路口之间的行驶时间;本发明具有利用出租车的GPS数据提取出租车的驾驶路径,结合最短路径算法计算得到各格子对之间的行程时间,作为可达性的评价依据的特点。
Description
技术领域
本发明涉及交通区域可达性技术领域,尤其是涉及一种基于车辆GPS轨迹数据实现区域实时等时线的方法。
背景技术
以数字化的方式表达城市空间信息,为智能化交通、动态导航和物流配送等日常需求提供最优决策支持是当前数字城市相关研究和信息化服务应用的热点问题,可达性作为上述热点问题研究中的主要空间动因,是空间行为和空间决策的决定性因素。可达性用于描述人们利用特定的交通系统从某一地点出发到达目的地的难易程度。作为一种反映交通成本的基本指标,可达性广泛应用于城市交通规划、时间地理学、交通运输经济学等研究领域。
在城市中,不同的出行方向,其可达性往往是不同的。因此,有必要在可达性研究中考虑出行方向,分方向、分时段对其可达性进行分析。时空可达性是一种从个体角度出发,综合考虑空间因素和时间因素,研究在特定的时空约束下的可达时空范围的方法,该方法将GIS技术和时间地理学的概念结合起来研究交通网络可达性。等时线是基于道路网络的可达性分析方法,用来表示从出发点出发,在经过相同的时空约束所有能到达的点的连线,其生成需要分析道路网络特性及通行状况,其形态可以反映可达性规律。
随着中国城市化进程的快速发展,大量的人口涌入城市,导致城市的规模不断扩大,城市交通需求量猛增。同时,由于社会经济水平的提高,中国机动车拥有量急剧增加,机动化出行的比例不断上升,导致城市交通问题日益突出,尤其是大城市交通拥堵非常严重。
交通拥堵导致车辆在道路上并不能按设计速度行驶,其实际通行速度往往低于设计时速。因而采用设计时速会使可达性的估计产生偏差。
随着无线定位和通讯技术的不断发展,基于GPS的浮动车能够实现全天候、大范围的动态交通信息采集,使得道路实际交通状况的可达性研究成为可能。目前浮动车GPS数据在交通和城市研究领域有着广泛应用,如交通事故自动监测、路网运行效率监控、人的出行行为分析以及道路通行时间的估计等。
在传统的交通可达性研究中,由于受到技术条件的限制,大多侧重于理论分析,不能以图的方式直观地把结果显示出来,因此,在城市规划中应用交通可达性分析结果是比较困难的。
发明内容
本发明的发明目的是为了克服现有技术中使用设计时速对可达性进行估计会带来偏差的不足,提供了一种基于车辆GPS轨迹数据实现区域实时等时线的方法。
为了实现上述目的,本发明采用以下技术方案:
一种基于车辆GPS轨迹数据实现区域实时等时线的方法,包括如下步骤:
(1-1)采集指定区域内的车辆GPS轨迹数据,对车辆GPS轨迹数据进行筛选、预处理;
(1-2)选择距离值M,对指定区域进行网格化;
(1-3)根据车辆GPS轨迹数据,为每个网格化后的格子填充对应的速度;
(1-4)视每个格子为一个路口,计算指定区域内的任意两个路口之间的行驶时间;
(1-5)给出5个指定时间点T1,T2,T3,T4,T5,计算出从每个路口出发在指定时间点到达的边界点;
(1-6)连接每个时间点上的边界点,得到各个路口出发在各个时间点的等时线,清洗等时线中内凹严重边界点,最终得到从各个路口出发在5个指定时间点上的等时线。
本发明利用出租车的GPS数据提取出租车的驾驶路径,结合最短路径算法计算得到各格子对之间的行程时间,作为可达性的评价依据,根据行程时间得到等时线及其渲染图,效果符合实际。
作为优选,(1-1)包括如下步骤:
所述指定区域的经度位于[lo1,lo2]区间,纬度位于[la1,la2]区间,每条车辆GPS轨迹数据均包含字段车牌号car_id、位置经度lo、位置纬度la、时间time,当前车速speed;根据时间顺序将每辆车的车辆GPS轨迹数据排序形成一条独立的轨迹线路。
作为优选,(1-2)包括如下步骤:
将指定区域按照边长M划分,生成多个等边长M的正方形,每个正方形的编号为正方形左下角的经纬度所在的位置,记为j*len(lo_list)+i,其中,j为纬度的位置,i为经度的位置,len(lo_list)指定区域沿经度方向按照边长M划分后,得到的份数。
作为优选,(1-3)包括如下步骤:
遍历每一条车辆轨迹线路数据,对于指定区域内的数据,找到线路的起点经纬度所在的格子编号和终点经纬度所在的格子编号,在两个对角格子所形成的矩阵内的所有格子中均插入线路轨迹数据的当前车速speed。
作为优选,(1-4)包括如下步骤:
视每个格子为一个路口,格子左下角的经纬度视为路口的经纬度;计算任意两个格子的左下角之间的距离dist和方位角angle,angle为两个格子左下角的连线与正北方向的夹角;
对两个格子所形成的对角线所在的矩阵内包含的所有小格子中的当前车速speed进行排序,得到当前车速speed序列,取当前车速speed序列中的排在中位的当前车速speed的数值v,利用公式dist/v计算得到两格子间的行驶时间。
作为优选,(1-5)包括如下步骤:
选出指定时间点Ti范围内的数据,i=1,2,...,5;将以同一个路口为起点的数据分成一组进行讨论,对于每一组数据,以起点为中心,将数据以指定方位角a1划分成 个小组,在每个小组中选出距离起点最远的路口,并将距离起点最远的路口作为时间点Ti范围内车辆可行的边界点,将所得边界点按顺时针方向给予序列号,若相邻两个边界点之间的方位差值大于a2度,则在相邻两个边界点之间添加起点作为边界点,并进行重新排序。
个小组,在每个小组中选出距离起点最远的路口,并将距离起点最远的路口作为时间点Ti范围内车辆可行的边界点,将所得边界点按顺时针方向给予序列号,若相邻两个边界点之间的方位差值大于a2度,则在相邻两个边界点之间添加起点作为边界点,并进行重新排序。
作为优选,(1-6)包括如下步骤:
第一次清洗:删除Ti内三点连线呈现内凹状态且夹角小于a3度的位于中间的边界点;
第二次清洗:删除每个起点的每个当前时间Ti位于小时间Ti-1,Ti-2,…,T1范围内的边界点,并同时删除在更大时间点Ti+1,Ti+2,…,T5上重复的边界点。
作为优选,对于不存在路径的格子对,用所有存在路径的格子对信息中的最短路径除以对应的行程时间,计算出相应的速度值,将得到的所有速度值进行排序,得到速度值序列,取速度值序列中的中位值w,作为缺失速度格子间的速度值,无路径的格子对间的行驶时间即为最短路径除以w。
行程时间根据车辆GPS轨迹数据上的格子对的两个格子所对应的时刻计算得到。
作为优选,所述最短路径采用Floyd-Warshall算法获得:
设Di1,j1,k为从格子i1到格子j1的只以{1,2,...,k}集合中的节点为中间节点的最短路径的长度,若最短路径经过格子k,则Di1,j1,k=Di1,k,k-1+Dk,j1,k-1,
否则Di1,j1,k=Di1,j1,k-1,因此Di1,j1,k=min{Di1,j1,k-1,Di1,k,k-1+Dk,j1,k-1}。
因此,本发明具有如下有益效果:利用出租车的GPS数据提取出租车的驾驶路径,结合最短路径算法计算得到各格子对之间的行程时间,作为可达性的评价依据,根据行程时间得到等时线及其渲染图,效果符合实际,有利于对交通可达性进行分析。
附图说明
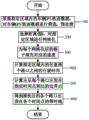
图1是本发明的一种流程图;
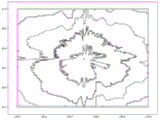
图2是本发明的一种区域结果示意图。
具体实施方式
下面结合附图和具体实施方式对本发明做进一步的描述。
如图1所示,一种基于车辆GPS轨迹数据实现区域实时等时线的方法,包括如下步骤:
步骤100,采集指定区域内的车辆GPS轨迹数据,对车辆GPS轨迹数据进行筛选、预处理:
采集经度位于[120.5,121.0],纬度位于[30.5,31.0]范围内的车辆GPS轨迹数据,每一辆车的GPS轨迹数据根据时间排序形成一条独立的轨迹线路;
步骤200,选择距离值M,对指定区域进行网格化:
选择合理的距离值M=500m,将经度位于[120.5,121.0],纬度位于[30.5,31.0]的区域网格化,每个格子对应一个编号;
步骤300,根据车辆GPS轨迹数据,为每个网格化后的格子填充对应的速度:
根据步骤100中的车辆GPS线路轨迹数据,找到线路的起点经纬度所在的格子编号和终点经纬度所在的格子编号,将两个对角格子所形成的矩阵内的所有格子都插入该线路轨迹数据的当前车速speed;
步骤400,视每个格子为一个路口,计算指定区域内的任意两个路口之间的行驶时间:
对于网格化后的区域,视每个格子为一个路口,格子左下角的经纬度视为路口的经纬度。计算任意两个格子间之间的距离dist,方位角angle,angle为两个格子左下角的连线与正北方向的夹角,其中,dist距离采用欧式距离计算。
对两个格子所形成的对角线所在的矩阵内包含的所有小格子中的当前车速speed进行排序,得到当前车速speed序列,取当前车速speed序列中的排在中位的当前车速speed的数值v,利用公式dist/v计算得到两格子间的行驶时间。
其中,最短路径采用Floyd-Warshall算法获得:
设Di1,j1,k为从格子i1到格子j1的只以{1,2,...,k}集合中的节点为中间节点的最短路径的长度,若最短路径经过格子k,则Di1,j1,k=Di1,k,k-1+Dk,j1,k-1,
否则Di1,j1,k=Di1,j1,k-1,因此Di1,j1,k=min{Di1,j1,k-1,Di1,k,k-1+Dk,j1,k-1}。
步骤500,给出指定时间点Ti,i=1,2,...,5;T1=200秒,T2=400秒,T3=600秒,T4=800秒,T5=1000秒,循环每一个时间点,指定时间范围内的数据,将以同一个路口为起点的数据分成一组进行讨论,对于每一组数据,以起点为中心,将数据以指定方位角1度划分成360个小组,在每个小组中选出距离起点最远的路口,并将距离起点最远的路口作为时间点Ti范围内车辆可行的边界点;所得边界点按顺时针方向给予序列号,若相邻两个边界点之间的方位差值大于180度,则在相邻两个边界点之间添加起点作为边界点,并进行重新排序求出每个起点每个时间段的边界点;
步骤600,连接每个时间点上的边界点,得到各个路口出发在各个时间点的等时线;清洗等时线中的内凹严重且时间不符合实际的边界点:第一次清洗,删除Ti内三点连线呈现内凹状态且夹角小于90度的位于中间的边界点;第二次清洗,删除每个起点的每个当前时间Ti位于小时间Ti-1,Ti-2,…,T1范围内的边界点,并同时删除更大时间Ti+1,Ti+2,…,T5范围内重复的边界点。例如,当前时间点为T3=600秒,则删除位于时间200秒和400秒范围内的边界点,并同时删除在于时间800秒,1000秒上的边界点。
如图2所示,得到区域结果示意图,其中,图2中部的点为一个路口,路口周边的4个等时线为以该路口为起点的T1=200秒,T2=400秒,T3=600秒,T4=800秒的等时线,本发明可通过图的方式直观地把等时线进行展示,有利于对交通可达性进行分析。
应理解,本实施例仅用于说明本发明而不用于限制本发明的范围。此外应理解,在阅读了本发明讲授的内容之后,本领域技术人员可以对本发明作各种改动或修改,这些等价形式同样落于本申请所附权利要求书所限定的范围。
Claims (9)
1.一种基于车辆GPS轨迹数据实现区域实时等时线的方法,其特征是,包括如下步骤:
(1-1)采集指定区域内的车辆GPS轨迹数据,对车辆GPS轨迹数据进行筛选、预处理;
(1-2)选择距离值M,对指定区域进行网格化;
(1-3)根据车辆GPS轨迹数据,为每个网格化后的格子填充对应的速度;
(1-4)视每个格子为一个路口,计算指定区域内的任意两个路口之间的行驶时间;
(1-5)给出5个指定时间点T1,T2,T3,T4,T5,计算出从每个路口出发在指定时间点到达的边界点;
(1-6)连接每个时间点上的边界点,得到各个路口出发在各个时间点的等时线,清洗等时线中内凹严重边界点,最终得到从各个路口出发在5个指定时间点上的等时线。
2.根据权利要求1所述的基于车辆GPS轨迹数据实现区域实时等时线的方法,其特征是,(1-1)包括如下步骤:
所述指定区域的经度位于[lo1,lo2]区间,纬度位于[la1,la2]区间,每条车辆GPS轨迹数据均包含字段车牌号car_id、位置经度lo、位置纬度la、时间time,当前车速speed;根据时间顺序将每辆车的车辆GPS轨迹数据排序形成一条独立的轨迹线路。
3.根据权利要求1所述的基于车辆GPS轨迹数据实现区域实时等时线的方法,其特征是,(1-2)包括如下步骤:
将指定区域按照边长M划分,生成多个等边长M的正方形,每个正方形的编号为正方形左下角的经纬度所在的位置,记为j*len(lo_list)+i,其中,j为纬度的位置,i为经度的位置,len(lo_list)指定区域沿经度方向按照边长M划分后,得到的份数。
4.根据权利要求1所述的基于车辆GPS轨迹数据实现区域实时等时线的方法,其特征是,(1-3)包括如下步骤:
遍历每一条车辆轨迹线路数据,对于指定区域内的数据,找到线路的起点经纬度所在的格子编号和终点经纬度所在的格子编号,在两个对角格子所形成的矩阵内的所有格子中均插入线路轨迹数据的当前车速speed。
5.根据权利要求1所述的基于车辆GPS轨迹数据实现区域实时等时线的方法,其特征是,(1-4)包括如下步骤:
视每个格子为一个路口,格子左下角的经纬度视为路口的经纬度;计算任意两个格子的左下角之间的距离dist和方位角angle,angle为两个格子左下角的连线与正北方向的夹角;
对两个格子所形成的对角线所在的矩阵内包含的所有小格子中的当前车速speed进行排序,得到当前车速speed序列,取当前车速speed序列中的排在中位的当前车速speed的数值v,利用公式dist/v计算得到两格子间的行驶时间。
6.根据权利要求1所述的基于车辆GPS轨迹数据实现区域实时等时线的方法,其特征是,(1-5)包括如下步骤:
选出指定时间点Ti范围内的数据,i=1,2,...,5;将以同一个路口为起点的数据分成一组进行讨论,对于每一组数据,以起点为中心,将数据以指定方位角a1划分成 个小组,在每个小组中选出距离起点最远的路口,并将距离起点最远的路口作为时间点Ti范围内车辆可行的边界点,将所得边界点按顺时针方向给予序列号,若相邻两个边界点之间的方位差值大于a2度,则在相邻两个边界点之间添加起点作为边界点,并进行重新排序。
个小组,在每个小组中选出距离起点最远的路口,并将距离起点最远的路口作为时间点Ti范围内车辆可行的边界点,将所得边界点按顺时针方向给予序列号,若相邻两个边界点之间的方位差值大于a2度,则在相邻两个边界点之间添加起点作为边界点,并进行重新排序。
7.根据权利要求1或2或3或4或5或6所述的基于车辆GPS轨迹数据实现区域实时等时线的方法,其特征是,(1-6)包括如下步骤:
第一次清洗:删除Ti内三点连线呈现内凹状态且夹角小于a3度的位于中间的边界点;
第二次清洗:删除每个起点的每个当前时间Ti位于小时间Ti-1,Ti-2,…,T1范围内的边界点,并同时删除在更大时间点Ti+1,Ti+2,…,T5上重复的边界点。
8.根据权利要求5所述的基于车辆GPS轨迹数据实现区域实时等时线的方法,其特征是,对于不存在路径的格子对,用所有存在路径的格子对信息中的最短路径除以对应的行程时间,计算出相应的速度值,将得到的所有速度值进行排序,得到速度值序列,取速度值序列中的中位值w,作为缺失速度格子间的速度值,无路径的格子对间的行驶时间即为最短路径除以w。
9.根据权利要求8所述的基于车辆GPS轨迹数据实现区域实时等时线的方法,其特征是,所述最短路径采用Floyd-Warshall算法获得:
设Di1,j1,k为从格子i1到格子j1的只以{1,2,...,k}集合中的节点为中间节点的最短路径的长度,若最短路径经过格子k,则Di1,j1,k=Di1,k,k-1+Dk,j1,k-1,
否则Di1,j1,k=Di1,j1,k-1,因此Di1,j1,k=min{Di1,j1,k-1,Di1,k,k-1+Dk,j1,k-1}。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201811167355.4A CN109520499B (zh) | 2018-10-08 | 2018-10-08 | 基于车辆gps轨迹数据实现区域实时等时线的方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201811167355.4A CN109520499B (zh) | 2018-10-08 | 2018-10-08 | 基于车辆gps轨迹数据实现区域实时等时线的方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN109520499A CN109520499A (zh) | 2019-03-26 |
| CN109520499B true CN109520499B (zh) | 2020-06-26 |
Family
ID=65772246
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201811167355.4A Active CN109520499B (zh) | 2018-10-08 | 2018-10-08 | 基于车辆gps轨迹数据实现区域实时等时线的方法 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN109520499B (zh) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110334861B (zh) * | 2019-06-27 | 2021-08-27 | 四川大学 | 一种基于轨迹数据的城市区域划分方法 |
| CN111210612B (zh) * | 2019-10-29 | 2021-01-19 | 浙江浙大中控信息技术有限公司 | 基于公交gps数据与站点信息提取公交线路轨迹的方法 |
| CN112017436B (zh) * | 2020-09-09 | 2021-09-28 | 中国科学院自动化研究所 | 城市市内交通旅行时间的预测方法及系统 |
| CN114661848A (zh) * | 2022-03-21 | 2022-06-24 | 阿里云计算有限公司 | 一种电子地图中的路线处理方法和装置 |
| CN116311914B (zh) * | 2023-02-21 | 2024-06-11 | 华南理工大学 | 面向交通等时线的道路线离散点等时特征值估计方法 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN1796942A (zh) * | 2004-12-21 | 2006-07-05 | 厦门雅迅网络股份有限公司 | 城际导航路径的计算方法 |
| CN106504523A (zh) * | 2015-09-06 | 2017-03-15 | 阿里巴巴集团控股有限公司 | 一种交通等时线信息生成方法及装置 |
| CN107291937A (zh) * | 2017-07-05 | 2017-10-24 | 武汉大学 | 一种兴趣点poi出行等时线的可视化方法 |
| CN107609682A (zh) * | 2017-08-22 | 2018-01-19 | 上海世脉信息科技有限公司 | 一种大数据环境下人口集聚中短期预警方法 |
| CN108520354A (zh) * | 2018-04-09 | 2018-09-11 | 江苏省城镇化和城乡规划研究中心 | 一种多点交通复合可达性分析方法 |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6668226B2 (en) * | 2001-10-11 | 2003-12-23 | Microsoft Corporation | Polar coordinate-based isochrone generation |
-
2018
- 2018-10-08 CN CN201811167355.4A patent/CN109520499B/zh active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN1796942A (zh) * | 2004-12-21 | 2006-07-05 | 厦门雅迅网络股份有限公司 | 城际导航路径的计算方法 |
| CN106504523A (zh) * | 2015-09-06 | 2017-03-15 | 阿里巴巴集团控股有限公司 | 一种交通等时线信息生成方法及装置 |
| CN107291937A (zh) * | 2017-07-05 | 2017-10-24 | 武汉大学 | 一种兴趣点poi出行等时线的可视化方法 |
| CN107609682A (zh) * | 2017-08-22 | 2018-01-19 | 上海世脉信息科技有限公司 | 一种大数据环境下人口集聚中短期预警方法 |
| CN108520354A (zh) * | 2018-04-09 | 2018-09-11 | 江苏省城镇化和城乡规划研究中心 | 一种多点交通复合可达性分析方法 |
Non-Patent Citations (2)
| Title |
|---|
| 基于交通等时线的城市商圈识别及交通要素研究;吴忠才 等;《商学研究》;20180630;第25卷(第3期);第62-70页 * |
| 等时线模型支持下的路网可达性分析;何亚坤 等;《测绘学报》;20141130;第43卷(第11期);第1190-1196页 * |
Also Published As
| Publication number | Publication date |
|---|---|
| CN109520499A (zh) | 2019-03-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN109520499B (zh) | 基于车辆gps轨迹数据实现区域实时等时线的方法 | |
| US11544950B2 (en) | Method and apparatus for updating road map geometry based on received probe data | |
| US10502577B2 (en) | Iterative map learning based on vehicle on-board sensor data | |
| US10140854B2 (en) | Vehicle traffic state determination | |
| EP3901782B1 (en) | Lane-centric road network model for navigation | |
| US11692837B2 (en) | Automatic discovery of optimal routes for flying cars and drones | |
| US9257042B2 (en) | Learning road feature delay times based on aggregate driver behavior | |
| US10580292B2 (en) | Lane-level geometry and traffic information | |
| JP5649726B2 (ja) | 障害横断情報を判断する方法 | |
| US11237007B2 (en) | Dangerous lane strands | |
| CN112991743B (zh) | 基于行驶路径的实时交通风险ai预测方法及其系统 | |
| US20190325738A1 (en) | Lane-level geometry and traffic information | |
| CN100357987C (zh) | 城市路网交通流区间平均速度的获取方法 | |
| CN105679009B (zh) | 一种基于出租车gps数据挖掘的打车/接单poi推荐系统及方法 | |
| CN102663887A (zh) | 基于物联网技术的道路交通信息云计算和云服务实现系统及方法 | |
| CN106197460A (zh) | 一种应用gps出行数据进行出行目的地预测的方法 | |
| WO2018011222A1 (en) | Map having computer executable instructions embedded therein | |
| CN102956105B (zh) | 一种浮动车样本点数据插值的方法 | |
| CN112183871B (zh) | 基于空气指数的城市交通诱导系统 | |
| Cathey et al. | Estimating corridor travel time by using transit vehicles as probes | |
| EP3617651B1 (en) | Use of a geographic database comprising lane level information for traffic parameter prediction | |
| CN112905856A (zh) | 一种具有时空依赖的高速交通数据集的构建方法 | |
| Bajracharya et al. | Urban intersection modelling for signal coordination and adaptive traffic control under heterogeneous traffic condition: A case study of Keshar Mahal and Durbar Marg intersections | |
| CN112212877A (zh) | 一种物联网无人驾驶车辆、导航路径计算方法及装置 | |
| CN105825670B (zh) | 基于数据融合的道路过饱和状态判断方法及系统 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant | ||
| CP01 | Change in the name or title of a patent holder | ||
| CP01 | Change in the name or title of a patent holder |
Address after: 310053 23-25, 2 building, 352 BINKANG Road, Binjiang District, Hangzhou, Zhejiang. Patentee after: Zhejiang zhongkong Information Industry Co.,Ltd. Address before: 310053 23-25, 2 building, 352 BINKANG Road, Binjiang District, Hangzhou, Zhejiang. Patentee before: ZHEJIANG SUPCON INFORMATION TECHNOLOGY Co.,Ltd. |