WO2025069264A1 - Mask case, transport carriage, mask buffer, and conveyance device - Google Patents
Mask case, transport carriage, mask buffer, and conveyance device Download PDFInfo
- Publication number
- WO2025069264A1 WO2025069264A1 PCT/JP2023/035210 JP2023035210W WO2025069264A1 WO 2025069264 A1 WO2025069264 A1 WO 2025069264A1 JP 2023035210 W JP2023035210 W JP 2023035210W WO 2025069264 A1 WO2025069264 A1 WO 2025069264A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- mask
- case
- static electricity
- conductive
- substrate
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images

















Classifications
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10P—GENERIC PROCESSES OR APPARATUS FOR THE MANUFACTURE OR TREATMENT OF DEVICES COVERED BY CLASS H10
- H10P72/00—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof
- H10P72/10—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof using carriers specially adapted therefor, e.g. front opening unified pods [FOUP]
Definitions
- a step-and-repeat type projection exposure apparatus (known as a stepper) or a step-and-scan type projection exposure apparatus (known as a scanning stepper, also called a scanner) is mainly used to transfer a pattern formed on a mask or reticle onto a glass substrate or wafer, etc., via a projection optical system.
- the mask case comprises a case body, at least a portion of which is conductive, that houses the mask, a conductive member that directs static electricity charged to the mask to the conductive portion of the case body, and a first static elimination member that is electrically connected to the conductive portion and that eliminates static electricity charged to the conductive portion.
- the transport cart is a transport cart for transporting the above-mentioned mask case, and includes a placement section on which the mask case is placed, and a static elimination mechanism for eliminating static electricity charged to the mask case placed on the placement section.
- the mask buffer is capable of storing a plurality of the above-mentioned mask cases, and includes a shelf portion on which the mask cases are placed, and a static elimination mechanism that eliminates static electricity charged to the mask cases placed on the shelf portion.
- the transport device is a transport device that transports mask cases out of and into a mask buffer that stores mask cases, and includes an arm section that drives in a first direction parallel to the surface of the mask to remove the mask case from and insert the mask case into the mask buffer, and a static elimination mechanism that eliminates static electricity charged to the arm section, and the arm section is electrically connected to the mask case while holding the mask case.
- FIG. 1 is a schematic diagram showing the configuration of an exposure apparatus according to an embodiment.
- FIG. 2A is a schematic diagram of the main body and the substrate transport device as viewed from above
- FIG. 2B is a schematic diagram of the main body and the substrate transport device as viewed from the side.
- FIG. 3A is a top view of a substrate tray
- FIG. 3B is a side view of the substrate tray with a substrate placed on the upper surface.
- FIG. 4 is a view of the transport mechanism as seen from the +X side.
- FIG. 5A is a diagram for explaining the relationship between the substrate holder, the transport mechanism, and the static electricity removal brush
- FIG. 5B is a diagram for explaining the relationship between the static electricity removal brush and the substrate tray.
- FIG. 5A is a diagram for explaining the relationship between the substrate holder, the transport mechanism, and the static electricity removal brush
- FIG. 5B is a diagram for explaining the relationship between the static electricity removal brush and the substrate tray.
- FIG. 6 is a diagram for explaining another example of the installation location of the static electricity eliminating brush.
- 7A to 7C are diagrams for explaining a robot hand according to a modified example of this embodiment.
- FIG. 8 is a diagram (part 1) for explaining the configuration of the mask loader.
- FIG. 9 is a diagram (part 2) for explaining the configuration of the mask loader.
- FIG. 10 is a flowchart showing a series of processes up to mounting the mask on the mask stage.
- FIG. 11 is a flow chart showing a series of processes after the mask is removed from the mask stage.
- FIG. 12 is a cross-sectional view for explaining the configuration of the mask case.
- FIG. 13 is a cross-sectional view showing another example of the configuration of the mask case.
- FIG. 14A is a diagram showing an outline of the transport cart, and FIG. 14B is an enlarged view of the mechanical stopper.
- 15A and 15B are diagrams for explaining the structure of the static elimination mechanism provided in the transport cart.
- 16A is a schematic diagram of the shelf portion of the mask buffer as viewed from the +Z direction
- FIG. 16B is a cross-sectional view taken along line AA of FIG. 16A.
- FIG. 17 is a schematic diagram showing the configuration of the buffer arm.
- FIG. 18A is a diagram showing the appearance of a mask transport mechanism according to an embodiment
- FIG. 18B is a schematic diagram showing the configuration of the mask transport mechanism.
- Figure 1 is a schematic diagram showing the configuration of an exposure apparatus EX according to one embodiment.
- the exposure device EX is used, for example, when manufacturing an organic EL display, to form a TP (Touch Panel) circuit or a CF (Color Filter) circuit on the upper surface of a substrate P.
- the substrate P is, for example, a glass plate on which TFTs (Thin Film Transistors) are formed by deposition or the like and then sealed, but is not limited to this.
- the exposure apparatus EX includes a main body 100, a substrate transport device 200, and a mask loader 300.
- the direction in which the mask M and substrate P (described later) are scanned relative to the projection optical system 116 during exposure is defined as the X-axis direction
- the direction perpendicular to the X-axis in the horizontal plane is defined as the Y-axis direction
- the direction perpendicular to the X-axis and Y-axis is defined as the Z-axis direction.
- the directions of rotation (tilt) around the X-axis, Y-axis, and Z-axis are defined as the ⁇ x, ⁇ y, and ⁇ z directions, respectively.
- FIG. 2(A) is a schematic diagram of the main body 100 and the substrate transport device 200 viewed from above
- FIG. 2(B) is a schematic diagram of the main body 100 and the substrate transport device 200 viewed from the side.
- the substrate transport device 200 is disposed on the +X side of the main body 100.
- the substrate transport device 200 may also be disposed on the -X side of the main body 100.
- the substrate transport device 200 transfers the substrate P between an external device 1000 (see FIG. 2A ) such as a coater/developer and the main body 100.
- the external device 1000 has, for example, a fork-shaped robot hand RH, and can transport the substrate P placed on the robot hand RH from the external device 1000 into the substrate transport device 200.
- the substrate transport device 200 includes a substrate tray (substrate support member) 201, a transport mechanism 202, an alignment mechanism 203, and a stand unit 204.
- the substrate tray 201 is placed on the stand 204.
- the substrate P placed on the robot hand RH is transported from the external device 1000 into the substrate transport device 200 and placed on the substrate tray 201 placed on the stand 204.
- the substrate tray 201 is a carrier used when transporting and installing the substrate P inside the main body 100, and the substrate P is placed on its upper surface.
- Fig. 3(A) is a top view of the substrate tray 201
- Fig. 3(B) is a side view of the substrate tray 201 with the substrate P placed on its upper surface.
- the substrate tray 201 is, for example, a lattice-shaped member.
- the substrate tray 201 includes a base member 201a and a support member 201b that is provided on the base member 201a and supports the substrate P.
- the base member 201a and the support member 201b are conductive, and the base member 201a and the support member 201b are electrically connected.
- “having conductivity” or “conductive” means having either electrostatic conductivity or electrostatic dissipation.
- the electrostatic conductive material is a material having a surface resistance value of 1 x 102 ⁇ Rs ⁇ 1 x 104 ⁇
- the electrostatic dissipation material is a material having a surface resistance value of 1 x 104 ⁇ Rs ⁇ 1 x 1011 ⁇ .
- the substrate tray 201 is provided with a discharge mechanism 210 for removing static electricity charged to the substrate P.
- the static electricity removal mechanism 210 includes a static electricity removal brush 210a and a discharge cord 210b.
- the static electricity removal brush 210a has conductive bristles (conductive fibers).
- the static electricity removal brush 210a is electrically connected to the base member 201a, and guides the static electricity charged on the substrate P supported by the support member 201b to the base member 201a.
- the support member 201b is also conductive and electrically connected to the base member 201a, so that the support member 201b also guides the static electricity charged on the substrate P to the base member 201a, but the support member 201b may be non-conductive.
- the discharge cord 210b is electrically connected to the base member 201a.
- the discharge cord 210b is also called a static discharger, and discharges the static electricity introduced to the base member 201a into the air. This makes it possible to remove the static electricity that has built up on the substrate P placed on the substrate tray 201, thereby preventing devices such as TFTs formed on the substrate P from being destroyed by the static electricity discharge phenomenon.
- the substrate tray 201 is large enough to accommodate, for example, a substrate P of G6 (1850 ⁇ 1500 mm) size without it protruding from the substrate tray 201.
- the substrate tray 201 is large enough to accommodate two substrates P of G6 half size, which are substrates P of G6 (1850 ⁇ 1500 mm) size divided in half.
- the size of the substrate P placed on the substrate tray 201 is not limited to G6 size, and may be larger or smaller than G6 size.
- the size of the substrate tray 201 is designed so that the substrate P can be placed without protruding from the substrate tray 201.
- the number of substrates P placed on the substrate tray 201 is not limited to one or two, and may be three or more.
- the alignment mechanism 203 positions the substrate P relative to the substrate tray 201 based on the position of the substrate P detected by a position detection sensor (not shown).
- the substrate P is transported into the main body 100 while placed on the substrate tray 201.
- the alignment mechanism 203 for example, the configuration described in Japanese Patent Application No. 2022-058723 can be used, but other configurations may also be used.
- the transport mechanism 202 transports the substrate tray 201 holding the positioned substrate P to the main body 100.
- the transport mechanism 202 also removes the substrate tray 201 arranged inside the main body 100 from the main body 100.
- FIG. 4 is a view of the transport mechanism 202 as seen from the +X side.
- the transport mechanism 202 has a transport arm 202a.
- the transport arm 202a grips the substrate tray 201 from both sides in the Y-axis direction.
- the transport mechanism 202 moves along the X-axis direction by a moving mechanism (not shown). In this way, the substrate tray 201 is transported by the transport mechanism 202.
- a conductive part 202b is attached to the transport arm 202a, and the conductive part 202b is grounded via wiring.
- the transport arm 202a gripping the substrate tray 201
- the conductive part 202b comes into contact with the base member 201a of the substrate tray 201.
- the main body 100 includes an illumination system 112, a mask stage 114 that holds a mask M on which a circuit pattern or the like is formed, a projection optical system 116, an optical base 118, and a substrate stage device 120 that holds a substrate P.
- the illumination system 112 is configured in the same manner as the illumination system disclosed in, for example, U.S. Patent No. 5,729,331.
- the illumination system 112 irradiates the mask M with light emitted from a light source (e.g., a mercury lamp) (not shown) via a reflector, a dichroic mirror, a shutter, a wavelength selection filter, various lenses, etc. (not shown), as exposure illumination light (illumination light) IL.
- the mask stage 114 holds a light-transmitting mask M.
- the mask stage 114 drives the mask M in the X-axis direction (scanning direction) relative to the illumination system 112 (illumination light IL) at a predetermined stroke via a drive system (not shown) including, for example, a linear motor, and also drives it slightly in the Y-axis direction and the ⁇ z direction.
- a drive system including, for example, a linear motor, and also drives it slightly in the Y-axis direction and the ⁇ z direction.
- Position information of the mask M in the horizontal plane is obtained by a mask stage position measurement system (not shown) including, for example, a laser interferometer or an encoder.
- the projection optical system 116 is disposed below the mask stage 114.
- the projection optical system 116 is a so-called multi-lens projection optical system with a configuration similar to that of the projection optical system disclosed in, for example, U.S. Patent No. 6,552,775, and is equipped with multiple optical systems that form an erect image, for example, in a double-telecentric, life-size system.
- the illumination light that passes through the mask M forms a projected image (partial upright image) of the circuit pattern of the mask M in that illumination area via the projection optical system 116 in an illumination light irradiation area (exposure area) conjugate to the illumination area on the substrate P.
- the mask M moves relative to the illumination area (illumination light IL) in the scanning direction and the substrate P moves relative to the exposure area (illumination light IL) in the scanning direction, scanning exposure of one shot area on the substrate P is performed and the pattern formed on the mask M is transferred to that shot area.
- the optical base 118 supports the mask stage 114 and the projection optical system 116.
- the substrate stage device 120 is used to position the substrate P with high precision relative to the projection optical system 116 (illumination light IL), and includes a substrate holder 121 that holds the substrate P, and a substrate stage 122.
- the substrate holder 121 has an accommodation portion 121a.
- the accommodation portion 121a is a groove provided in the substrate holder 121, and accommodates the substrate tray 201. As a result, when the substrate tray 201 holding the substrate P is accommodated in the accommodation portion 121a, the substrate P is positioned on the upper surface of the substrate holder 121.
- the substrate stage 122 is driven by a drive device (not shown) at a predetermined stroke along the horizontal plane (X-axis direction and Y-axis direction) and is also finely driven in six degrees of freedom.
- the configuration of the substrate stage device 120 is not particularly limited, but it is preferable to use a stage device with a so-called coarse and fine movement configuration that includes a gantry-type two-dimensional coarse movement stage and a fine movement stage that is finely driven relative to the two-dimensional coarse movement stage, as disclosed in, for example, JP 2004-14915 A or US Patent Application Publication No. 2012/0057140 A.
- an X-moving mirror (bar mirror) 124X with a reflective surface perpendicular to the X-axis is fixed to the -X side of the substrate stage 122, and a Y-moving mirror 124Y with a reflective surface perpendicular to the Y-axis is fixed to the +Y side.
- First and second laser interferometers (not shown) are attached to the optical table 118 to measure the X-axis and Y-axis positions, respectively, of the substrate holder 121 that holds the substrate P.
- the first laser interferometer irradiates a measurement beam onto the X movable mirror 124X and an X fixed mirror (not shown) fixed near the projection optical system 116.
- the first laser interferometer measures the position information of the substrate holder 121 in the X axis direction based on the position of the X fixed mirror.
- the second laser interferometer also irradiates a measurement beam onto the Y movable mirror 124Y and a Y fixed mirror (not shown) fixed near the projection optical system 116.
- the second laser interferometer measures the position information of the substrate holder 121 in the Y axis direction based on the position of the Y fixed mirror.
- a control device drives the substrate stage 122 based on the position information (including rotation information (yawing amount (amount of rotation in the ⁇ z direction ⁇ z), pitching amount (amount of rotation in the ⁇ y direction ⁇ y), and rolling amount (amount of rotation in the ⁇ x direction ⁇ x))) of the substrate stage 122 in the XY plane measured by the first laser interferometer and the second laser interferometer.
- position information including rotation information (yawing amount (amount of rotation in the ⁇ z direction ⁇ z), pitching amount (amount of rotation in the ⁇ y direction ⁇ y), and rolling amount (amount of rotation in the ⁇ x direction ⁇ x)) of the substrate stage 122 in the XY plane measured by the first laser interferometer and the second laser interferometer.
- alignment measurement (e.g., EGA, etc.) is performed prior to exposure, and the results are used to expose the substrate P in the following procedure.
- the mask stage 114 and the substrate stage 122 are synchronously driven in the X-axis direction according to instructions from a control device (not shown). This performs scanning exposure on the first shot area on the substrate P.
- the control device moves (steps) the substrate stage 122 to a position corresponding to the second shot area. Then, scanning exposure is performed on the second shot area.
- the control device (not shown) similarly repeats stepping between shot areas of the substrate P and scanning exposure on the shot areas to transfer the pattern of the mask M to all shot areas on the substrate P.
- an X-ray ionizer is provided in the main body 100 to remove static electricity that has built up on the substrate P placed on the substrate holder 121. Also, an X-ray ionizer is provided in the substrate transport device 200 to remove static electricity that has built up on the substrate P placed on the substrate tray 201 held on the stand 204. Note that an X-ray ionizer may be provided in either the main body 100 or the substrate transport device 200.
- a static elimination brush 500 is provided so that the static electricity built up on the substrate P can be removed even while the substrate P is moving between the substrate holder 121 (first region) and the stand 204 (second region), more specifically, so that the static electricity led from the substrate P to the substrate tray 201 can be removed.
- FIG. 5(A) is a diagram for explaining the relationship between the substrate holder 121, the transport mechanism 202, and the static electricity removal brush 500
- FIG. 5(B) is a diagram for explaining the relationship between the static electricity removal brush 500 and the substrate tray 201.
- the static electricity removal brush 500 is provided in the region between the main body 100 and the stand 204 in the X-axis direction. As shown in FIG. 5(B), the static electricity removal brush 500 extends in a direction (Y-axis direction) perpendicular to the movement direction (X-axis direction) of the substrate tray 201. The static electricity removal brush 500 is also provided so as to face the surface of the substrate tray 201 opposite the surface holding the substrate P while the substrate tray 201 is moving between the stand 204 and the substrate holder 121. The static electricity removal brush 500 is also grounded.
- the static electricity removal brush 500 has conductive bristles 502 that extend (extend in the +Z direction) toward the substrate tray 201 when the substrate tray 201 is above the static electricity removal brush 500, and removes static electricity conducted from the substrate P to the base member 201a of the substrate tray 201. This makes it possible to prevent devices such as TFTs formed on the substrate P from being destroyed by the discharge phenomenon of static electricity charged on the substrate P while the transport mechanism 202 is transporting the substrate P between the stand 204 and the substrate holder 121.
- the antistatic brush 500 is arranged so that the conductive bristle bundle 502 does not come into contact with the lower surface of the base member 201a of the substrate tray 201 (the surface opposite to the surface of the substrate tray 201 that supports the substrate P).
- the substrate tray 201 and the substrate P transported by the transport mechanism 202 bend under their own weight. Therefore, the center portions of the substrate tray 201 and the substrate P in the Y-axis direction are located lower than both ends. Therefore, the conductive bristle bundle 502 of the antistatic brush 500 is short in the center portion in the Y-axis direction and becomes longer as it approaches both ends. This prevents the conductive bristle bundle 502 of the antistatic brush 500 from coming into contact with the substrate tray 201.
- the bristle bundle 502 comes into contact with the substrate tray 201 and wears, dust may be generated in the exposure apparatus EX due to the wear, and the dust may cause poor exposure.
- the length of the conductive bristle bundles 502 of the static electricity removal brush 500 as described above, the occurrence of poor exposure can be suppressed.
- a grounded static electricity removal brush 500A may be provided on the substrate stage 122 as shown in FIG. 6.
- the static electricity removal brush 500A extends in a direction (Y-axis direction) perpendicular to the moving direction (X-axis direction) of the substrate tray 201, and is provided so as to face the surface of the substrate tray 201 opposite the surface that holds the substrate P while the substrate tray 201 is moving between the stand 204 and the substrate holder 121.
- the conductive bristles of the static electricity removal brush 500A may be short in the center in the Y-axis direction and become longer as they approach both ends.
- the substrate P may be transported to the substrate holder 121 by, for example, a fork-type robot hand RH as shown in FIG. 2(A).
- the substrate transport device 200 is omitted.
- FIGS. 7(A) to 7(C) are diagrams for explaining a robot hand RH-A according to a modified example of this embodiment.
- FIG. 7(A) is a diagram of the robot hand RH-A viewed from the +Z direction
- FIG. 7(B) is a diagram of the robot hand RH-A with substrate P placed thereon viewed from the +Z direction
- FIG. 7(C) is a diagram of the robot hand RH-A with substrate P placed thereon viewed from the +Z direction.
- the robot hand RH-A comprises a conductive base member 801, a conductive support member 802 provided on the base member 801, and a static electricity removal brush 803.
- the support member 802 is electrically connected to the base member 801.
- the static electricity removal brush 803 has a conductive tuft of bristles that is electrically connected to the base member 801. As a result, the static electricity charged to the substrate P is conducted to the base member 801 via the support member 802 and the static electricity removal brush 803.
- the static electricity removal brush 500 is placed on the path that the robot hand RH-A takes to transport the substrate P to the main body 100, and on the path that the robot hand RH-A takes to transport the substrate P from the main body 100 to a predetermined position. This allows static electricity guided to the base member 801 to be released to the ground via the static electricity removal brush 500. This makes it possible to prevent devices such as TFTs formed on the substrate P from being destroyed by the discharge phenomenon of static electricity charged on the substrate P.
- the support member 802 may be non-conductive.
- a discharge cable may also be provided that electrically connects to the base member 801 of the robot hand RH-A.
- ⁇ Mask Loader 300> 8 and 9 are diagrams for explaining the configuration of the mask loader 300. Note that Fig. 8 shows a cross-sectional view of part of the configuration.
- the mask loader 300 includes a mask buffer 310, a pellicle foreign substance inspection unit (hereinafter referred to as PPD) 390, a buffer arm 330, a relay table 350, and a mask transport mechanism 370.
- PPD pellicle foreign substance inspection unit
- the mask buffer 310 temporarily stores the mask case 600 in which the mask M is stored.
- the mask buffer 310 has multiple slots SLT for storing the mask case 600.
- PPD390 is disposed above mask buffer 310. PPD390 inspects whether there is any foreign matter adhering to the pellicle PLCL (see FIG. 12) of mask M, and whether there is any foreign matter adhering to the surface of mask M opposite to the surface on which the pellicle PLCL is provided. PPD390 has a PPD arm 391.
- the relay table 350 temporarily holds the mask M being transported when the mask M is replaced.
- the relay table 350 has a table (not shown) for placing the mask M to be loaded onto the mask stage 114 of the main body 100, and a table (not shown) for placing the mask M unloaded from the mask stage 114 of the main body 100.
- the buffer arm 330 loads and unloads and transports the mask case 600 from the mask buffer 310.
- the mask transport mechanism 370 transports the mask M from the relay table 350 to the main body 100, and vice versa.
- the mask transport mechanism 370 also transports the mask M to the PPD arm 391 and receives the mask M from the PPD arm 391.
- the mask transport mechanism 370 also hands over the mask M to the buffer arm 330.
- Figure 10 is a flowchart showing a series of processing steps up to mounting the mask M on the mask stage 114
- Figure 11 is a flowchart showing a series of processing steps after removing the mask M from the mask stage 114.
- the mask M on which the pattern is formed is stored in the mask case 600 described below (step S11).
- the mask case 600 storing the mask M is loaded onto the transport cart 700 described below (step S13).
- the transport cart 700 on which the mask case 600 is placed is inserted into the mask buffer 310 (step S15). This causes the mask case 600 to be inserted into the mask buffer 310.
- the mask case 600 inserted into the mask buffer 310 is stored in each slot SLT of the mask buffer 310 (step S17).
- the mask M is transported together with the mask case 600 by the buffer arm 330 (step S19).
- the mask transport mechanism 370 removes and transports the mask M from the mask case 600 transported by the buffer arm 330 (step S20).
- the mask M is handed over to the PPD arm 391 of the PPD 390, where the presence or absence of foreign matter adhering to the pellicle PLCL of the mask M and the presence or absence of foreign matter adhering to the surface of the mask M opposite the surface on which the pellicle PLCL is provided are inspected (step S21).
- the mask M is transported by the mask transport mechanism 370 via the relay table 350 to the mask stage 114 (step S23). After that, the mask M is mounted on the mask stage 114 (step S25), and the process of FIG. 10 is completed.
- the process in FIG. 11 begins when exposure of the substrate P is completed. First, the mask M is removed from the mask stage 114 (step S31).
- the removed mask M is transported by the mask transport mechanism 370 (step S33).
- the mask M transported by the mask transport mechanism 370 is stored in the mask case 600 (step S35).
- the mask case 600 is transported by the buffer arm 330 and stored in the mask buffer 310 (step S37).
- the mask case 600 stored in the mask buffer 310 is removed from the mask buffer 310 and loaded onto the transport cart 700 (step S39).
- the mask case 600 is transported to a predetermined location by the transport cart 700 and removed from the transport cart 700 (step S41).
- the mask M is removed from the mask case 600 removed from the transport cart 700 (step S43), and the process of FIG. 11 is completed.
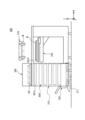
- Fig. 12 is a cross-sectional view for explaining the structure of the mask case 600. Note that in Fig. 12, hatching of some elements is omitted.
- the mask case 600 includes a case body 601 that houses the mask and a discharge cord 602.
- the case body 601 includes a first case part 601a having a bottom surface BS, and a second case part 601b that is detachably provided to the first case part 601a and has a ceiling surface CS that is disposed opposite the bottom surface BS.
- the first case part 601a and the second case part 601b are conductive.
- the first case part 601a has legs 610, and a mask case support part 611 is attached to the legs 610.
- the mask case support part 611 is conductive and is electrically connected to the first case part 601a (legs 610).
- a mask support member 603 that supports the mask M is provided on the bottom surface BS of the first case part 601a.
- the mask support member 603 supports the mask M so that the pellicle PLCL that protects the area where a pattern is formed on the mask M does not come into contact with the bottom surface BS.
- the mask support member 603 is conductive and is electrically connected to the first case part 601a. Therefore, the mask support member 603 and the mask case support part 611 are electrically connected.
- the discharge cord 602 is electrically connected to the first case portion 601a. Therefore, the mask support member 603 and the discharge cord 602 are electrically connected. As a result, the static electricity charged on the mask M is guided by the mask support member 603 to the conductive first case portion 601a, and the static electricity charged on the first case portion 601a is discharged by the discharge cord 602. This makes it possible to prevent the pattern formed on the mask M from being destroyed by the discharge phenomenon of the static electricity charged on the mask M.
- a static elimination brush 604 having conductive bristles is provided on the ceiling surface CS of the second case part 601b.
- the static elimination brush 604 is electrically connected to the second case part 601b.
- the static elimination brush 604 faces the mask M supported by the mask support member 603, and guides the static electricity charged on the mask M to the second case part 601b.
- the first case part 601a and the second case part 601b are electrically connected.
- static electricity conducted from the mask M to the second case part 601b is conducted by the first case part 601a to the discharge cord 602 and discharged from the discharge cord 602. This makes it possible to prevent the pattern formed on the mask M from being destroyed by the discharge phenomenon of the static electricity charged on the mask M.
- the first case part 601a and the second case part 601b are made of aluminum, for example, and have a non-conductive coating (such as an anti-rust coating) formed on their surfaces. Therefore, in this embodiment, when the second case part 601b is attached to the first case part 601a, the coating is removed from the portion where the first case part 601a and the second case part 601b come into contact. Also, the coating is removed from the portion of the first case part 601a where the mask support member 603 is attached. Also, the coating is removed from the portion of the first case part 601a where the mask case support part 611 is attached. Also, the coating is removed from the portion of the second case part 601b where the anti-static brush 604 is positioned. This ensures electrical connection. In FIG. 12, the portion of the first case part 601a where the coating has been removed is shown as coating removal area 615a, and the portion of the second case part 601b where the coating has been removed is shown as coating removal area 615b.
- a non-conductive coating such as
- FIG. 13 is a cross-sectional view showing another example of the configuration of the mask case 600.
- an electrode member 605a such as a bus bar is provided on a part of the bottom surface BS of the first case part 601a, and the mask support member 603 is electrically connected to the electrode member 605a.
- an electrode member 605b such as a bus bar is provided to electrically connect the electrode member 605a provided on the first case part 601a and the discharge cord 602.
- an electrode member 605c such as a bus bar is provided on the ceiling surface CS of the second case part 601b, and the static electricity removal brush 604 is electrically connected to the electrode member 605c.
- An electrode member 605d such as a bus bar is provided to electrically connect the electrode member 605c and the electrode member 605a when the second case part 601b is attached to the first case part 601a.
- the electrode member 605d has elasticity, which ensures a reliable electrical connection between the electrode member 605c and the electrode member 605a.
- an electrode member 605e such as a bus bar is provided on the leg portion 610 of the first case portion 601a, and the mask case support portion 611 is electrically connected to the electrode member 605e.
- the electrode member can be used to realize electrical connection between the various components, and static electricity charged to the mask M can be discharged from the discharge cord 602.
- the mask case 600 containing the mask M is transported by the transport cart 700 to the mask buffer 310 and stored in the mask buffer 310.
- Fig. 14(A) is a diagram showing an overview of the transport cart 700.
- the transport cart 700 includes a mounting section 701 on which the mask case 600 is mounted, wheels 702 attached to the mounting section 701, a handle section 703 that an operator grips when moving the transport cart 700, and a mechanical stopper 704 disposed on the front side of the mounting section 701.
- the transport cart 700 further includes a static elimination mechanism 710 that eliminates static electricity charged on the mask case 600 mounted on the mounting section 701.
- the static elimination mechanism 710 includes a first electrode part 711, a discharge cable 712, and an electrode member 713.
- FIGS. 15(A) and 15(B) are diagrams for explaining the structure of the static electricity removal mechanism 710.
- the first electrode part 711 is, for example, a contact probe, and as shown in FIG. 15(A), is biased upward by a biasing member 715 such as a compression spring. As a result, the tip of the first electrode part 711 protrudes beyond the contact surface 701a of the mounting part 701 that contacts the mask case support part 611 of the mask case 600.
- the first electrode part 711 and the mask case support portion 611 come into contact with each other and are electrically connected.
- the first electrode part 711 is electrically connected to the discharge cord 712. This allows the static electricity charged on the mask case 600 to be guided to the discharge cord 712 by the first electrode part 711 and discharged from the discharge cord 712. This makes it possible to prevent the pattern formed on the mask M from being destroyed by the discharge phenomenon of the static electricity charged on the mask M while the mask case 600 containing the mask M is being transported on the transport cart 700.
- the first electrode part 711 is also electrically connected to an electrode member 713 provided on the front side of the mechanical stopper 704.
- the electrode member 713 is a conductive member, for example, a bus bar.
- the transport cart 700 when storing the mask case 600 in the mask buffer 310, the transport cart 700 is positioned by riding on the positioning frame 311 provided on the mask buffer 310.
- the positioning frame 311 is provided with a mechanical stopper 315 as shown in FIG. 14(A).
- the transport cart 700 is positioned on the positioning frame 311 by the mechanical stopper 704 of the transport cart 700 coming into contact with the mechanical stopper 315 of the positioning frame 311.
- FIG. 14(B) is an enlarged view of the mechanical stopper 315.
- the mechanical stopper 315 is provided with a second electrode part 312 and a shock absorbing part 313 such as a shock absorber.
- the shock absorbing part 313 absorbs the shock when the mechanical stopper 704 of the transport cart 700 comes into contact with the mechanical stopper 315.
- the second electrode part 312 is, for example, a contact probe, and is electrically connected to the electrode member 713 of the transport cart 700 when the transport cart 700 is positioned on the positioning frame 311.
- the second electrode part 312 is biased by a biasing member 316 such as a compression spring so that the tip of the second electrode part 312 protrudes beyond the mechanical stopper surface 315a.
- the second electrode part 312 is grounded. Therefore, when the transport cart 700 is positioned on the positioning frame 311, the static electricity charged in the mask case 600 can be released to the ground via the first electrode part 711, the electrode member 713, and the second electrode part 312. This makes it possible to prevent the pattern formed on the mask M from being destroyed by the static electricity discharge phenomenon.
- the mask case 600 placed on the placement section 701 is transported into the mask buffer 310.
- the mask buffer 310 includes a plurality of slots SLT in which the mask cases 600 are stored, and each slot SLT is provided with a shelf portion 320 on which the mask case 600 is placed.
- FIGS. 16(A) and 16(B) are diagrams for explaining the configuration of each shelf portion 320, with FIG. 16(A) being a schematic diagram of the shelf portion 320 of the mask buffer 310 as viewed from the +Z direction, and FIG. 16(B) being a cross-sectional view along line A-A in FIG. 16(A).
- the shelf portion 320 has a pair of support portions 320a that support the mask case 600, and a frame portion 320b to which the support portions 320a are fixed.
- the pair of support parts 320a are spaced apart in the Y-axis direction, and each support part 320a extends in the X-axis direction.
- Each support part 320a is provided with a plurality of case support members 320c that contact the mask case support part 611 of the first case part 601a of the mask case 600 and support the mask case 600 from below.
- the support portion 320a, the frame portion 320b, and the case support member 320c are conductive.
- the support portion 320a and the frame portion 320b are electrically connected, and the case support member 320c and the support portion 320a are electrically connected.
- a non-conductive coating e.g., a rust-prevention coating, etc.
- the coating is removed from the electrically connected portions of the support portion 320a and the frame portion 320b.
- the portion of the support portion 320a where the coating is removed is shown as the coating removal area 321a
- the portion of the frame portion 320b where the coating is removed is shown as the coating removal area 321b.
- the frame portion 320b is grounded.
- the static electricity charged on the mask case 600 is guided to the frame portion 320b via the case support member 320c and the support portion 320a and is released to the ground. This makes it possible to prevent the mask M contained in the mask case 600 and the pattern formed on the mask M from being destroyed by the discharge phenomenon of the static electricity charged on the mask case 600.
- the case support member 320c that contacts the mask case 600, the support portion 320a that is electrically connected to the case support member 320c, and the frame portion 320b that is electrically connected to the support portion 320a and is grounded function as a static elimination mechanism that eliminates the static electricity charged on the mask case 600.
- a static elimination brush having conductive bristles extending towards the mask case 600 may be provided on the surface of the support part 320a facing the mask case 600 (the surface on the +Z side).
- the conductive bristles are electrically connected to the support part 320a. This allows the static elimination brush to guide the static electricity charged on the mask case 600 to the frame part 320b.
- the case support member 320c may be non-conductive.
- ⁇ Buffer arm 330> The mask cases 600 stored in the mask buffer 310 are carried in and out by the buffer arm 330.
- Fig. 17 is a schematic diagram showing the configuration of the buffer arm 330.
- the buffer arm 330 includes an arm portion 331 that is driven in the X-axis direction to remove the mask case 600 from the mask buffer 310 (more specifically, the shelf portion 320) and to insert the mask case 600 into the mask buffer 310, and a static elimination mechanism 340 that eliminates static electricity charged to the arm portion 331.
- the arm portion 331 includes a conductive main body portion 331a, a positioning mechanism 331b, and a base portion 331c.
- the base portion 331c supports the mask case support portion 611 of the mask case 600.
- the positioning mechanism 331b engages with a recess 612a provided in a positioning portion 612 of the mask case 600, and determines the position of the mask case 600 relative to the buffer arm 330 so that the mask case support portion 611 is supported by the base portion 331c.
- the positioning portion 612 is conductive and electrically connected to the first case portion 601a of the mask case 600.
- the arm portion 331 is driven in the X-axis direction as shown by the arrow AR31 by a first drive mechanism 333 such as a linear guide held by a conductive first frame 332. This allows the arm portion 331 to enter the slot SLT.
- the first frame 332 is driven in the Z-axis direction as shown by the arrow AR32 by a second drive mechanism 335 such as a linear guide held by a conductive second frame 334.
- the second case portion 601b remains in the slot SLT, and only the first case portion 601a containing the mask M is removed by the arm portion 331.
- the static elimination mechanism 340 includes a third electrode part 341, a first static elimination brush 342, and a second static elimination brush 343.
- the third electrode part 341 is, for example, a contact probe, and contacts the mask case 600 (positioning part 612) when the mask case 600 is placed on the arm part 331. This electrically connects the mask case 600 and the third electrode part 341.
- the third electrode part 341 is biased by a biasing member 345 such as a compression spring so that the tip of the third electrode part 341 is located above the position where the positioning part 612 of the mask case 600 is located when the mask case 600 is placed on the arm part 331. This makes it possible to more reliably ensure electrical continuity between the mask case 600 and the third electrode part 341.
- the third electrode part 341 is electrically connected to the main body part 331a. This makes it possible to guide the static electricity charged in the mask case 600 to the main body part 331a.
- the first static electricity removal brush 342 has conductive bristles extending toward the main body 331a.
- the first static electricity removal brush 342 is electrically connected to the first frame 332.
- a non-conductive coating is formed on the surface of the main body 331a of the arm portion 331, but the coating is removed in the portion shown by dotted hatching in FIG. 17. Specifically, the coating is removed from the underside of the end on the -X side and the underside near the center of the main body 331a, exposing the material of the main body 331a.
- the first static electricity removal brush 342 can guide the static electricity charged on the main body 331a to the first frame 332 when facing the coating removal area 336a and the coating removal area 336b.
- the first charge removal brush 342 guides the static electricity charged on the main body 331a (arm portion 331) to the first frame 332 when the arm portion 331 is positioned closest to the mask buffer 310 in the X-axis direction and when it is positioned closest to the second frame 334 in the X-axis direction.
- the second static electricity removal brush 343 has conductive bristles extending toward the first frame 332.
- the second static electricity removal brush 343 is electrically connected to the second frame 334.
- a non-conductive coating is formed on the surface of the first frame 332, but the coating has been removed from the area indicated by dotted hatching in FIG. 17. Specifically, the coating has been removed from the end of the first frame 332 on the -Z side, exposing the material of the first frame 332. If the area of the first frame 332 from which the coating has been removed is referred to as the coating removal area 332a, then the second static electricity removal brush 343, when facing the coating removal area 332a, can guide the static electricity charged on the first frame 332 to the second frame 334.
- the second static elimination brush 343 is provided in at least two locations so as to face the coating removal area 332a of the first frame 332 when the first frame 332 is at its highest position and its lowest position in the Z-axis direction.
- the second static electricity removal brush 343 may be provided to face the coating removal area 332a of the first frame 332 at least one of the times when the first frame 332 is at the highest position or the lowest position in the Z-axis direction.
- the second static electricity removal brush 343 may also be provided at multiple locations spaced apart in the Z-axis direction to correspond to the stopping positions of the arm portion 331 in the Z-axis direction (positions corresponding to each slot SLT).
- the second frame 334 is grounded. This allows static electricity charged on the mask case 600 to escape to the ground via the third electrode part 341, the main body 331a, the first charge-removing brush 342, the first frame 332, the second charge-removing brush 343, and the second frame 334.
- the first charge-removing brush 342 guides the static electricity charged on the main body 331a (arm 331) to the first frame 332 when the arm 331 is positioned closest to the mask buffer 310 in the X-axis direction and when the arm 331 is positioned closest to the second frame 334 in the X-axis direction. Therefore, when the mask case 600 is removed from the shelf 320 and when the mask case 600 is returned to the shelf 320, the static electricity charged on the mask case 600 can be removed.
- the PPD arm 391 moves to below the mask transport mechanism 370, and the mask M is transferred from the mask transport mechanism 370 to the PPD arm 391.
- the PPD arm 391 carrying the mask M moves into the PPD 390.
- the presence or absence of foreign matter adhering to the pellicle PLCL of the mask M and the presence or absence of foreign matter adhering to the surface of the mask M opposite the surface on which the pellicle PLCL is provided are inspected.
- the PPD arm 391 carrying the mask M moves below the mask transport mechanism 370, and the mask M is transferred from the PPD arm 391 to the mask transport mechanism 370.
- the mask transport mechanism 370 holding the mask M moves the mask M to the mask stage 114 of the main body 100.
- Fig. 18(A) is a diagram showing the appearance of a mask transport mechanism 370 according to this embodiment
- Fig. 18(B) is a schematic diagram showing the configuration of the mask transport mechanism 370.
- the mask transport mechanism 370 includes a pair of holders 371 that hold a mask M, and a static electricity removal mechanism 380 that removes static electricity charged to the holders 371.
- Fig. 18(B) illustrates one of the pair of holders 371.
- the holding portion 371 includes a conductive support portion 371a that contacts and supports the mask M, and an arm portion 371b to which the support portion 371a is connected and which can be driven in the Y-axis direction.
- a portion of the arm portion 371b is housed within the housing 372.
- the arm portion 371b is driven in the Y-axis direction by an actuator 373, such as a guided cylinder.
- the actuator 373 is also housed within the housing 372.
- the support portion 371a and the arm portion 371b are conductive.
- the static electricity removal mechanism 380 includes a connection portion 381 that electrically connects the support portion 371a and the arm portion 371b and guides the static electricity charged on the support portion 371a to the arm portion 371b, and a static electricity removal brush 382 that guides the static electricity charged on the arm portion 371b to the housing 372.
- the support portion 371a is rotatable around the axis 371c, as indicated by the arrow AR41. Therefore, the connection portion 381 has elasticity to ensure electrical connection between the support portion 371a and the arm portion 371b.
- a metal leaf spring can be used as the connection portion 381.
- the arm portion 371b has a conductive material with a non-conductive coating formed on its surface, but the coating is removed from the portion 371e to which the connection portion 381 is connected. This allows the connection portion 381 to conduct static electricity charged on the support portion 371a to the arm portion 371b.
- the coating of the arm portion 371b is removed from the portion 371f that faces the discharging brush 382 when the support portion 371a is holding the mask M. This allows the static electricity charged on the arm portion 371b to be conducted to the housing 372 when the support portion 371a is holding the mask M.
- the housing 372 is conductive and grounded. Therefore, while the mask transport mechanism 370 is transporting the mask M, the static electricity charged to the mask M can be guided to the housing 372 via the support portion 371a, the arm portion 371b, and the static electricity removal brush 382, and then released from the housing 372 to the ground. This makes it possible to prevent the pattern formed on the mask M from being destroyed by the discharge of the static electricity charged to the mask M. Note that when the arm portion 371b is made up of multiple components, the coating is removed at the connection portions of the multiple components to achieve electrical connection.
- the exposure apparatus EX is equipped with a discharging brush 500 that dissipates static electricity charged on the substrate tray 201 while the substrate tray 201 supporting the substrate P is moving.
- the substrate tray 201 has a conductive base member 201a, a discharging brush 210a that faces the substrate P supported by the substrate tray 201 and guides the static electricity charged on the substrate P to the base member 201a, and a conductive support member 201b, and the discharging brush 500 dissipates the static electricity guided to the base member 201a.
- This makes it possible to prevent devices such as TFTs formed on the substrate P from being destroyed by the discharge phenomenon of the static electricity charged on the substrate P while the substrate P is being transported using the substrate tray 201.
- the static electricity removal brush 500 is provided in an area located between the main body 100, which removes static electricity from the substrate P, and the stand 204, and removes static electricity from the substrate tray 201 while the substrate tray 201 moves through this area.
- the substrate P placed on the substrate holder 121 is removed by an X-ray ionizer provided in the main body 100, but if the static electricity removal brush 500 is not provided, there is no means for dissipating the static electricity (static electricity charged to the substrate tray 201) charged to the substrate P while the substrate P is being transported between the main body 100 and the stand 204, and there is a risk that devices such as TFTs formed on the substrate P will be destroyed by the discharge phenomenon of the static electricity charged to the substrate P.
- the static electricity removal brush 500 By providing the static electricity removal brush 500 in the area between the main body 100 and the stand 204, it is possible to remove static electricity conducted from the substrate P to the substrate tray 201 while the substrate P is being transported between the main body 100 and the stand 204, thereby preventing devices such as TFTs formed on the substrate P from being destroyed by the discharge phenomenon of static electricity charged on the substrate P.
- the discharging brush 500 is provided to face the surface of the substrate tray 201 opposite the surface that holds the substrate P. Because the surface of the substrate tray 201 that holds the substrate P is covered by the substrate P, even if the discharging brush 500 is provided to face the surface that holds the substrate P, there is a risk that the static electricity charged to the substrate tray 201 may not be sufficiently removed. By providing the discharging brush 500 to face the surface of the substrate tray 201 opposite the surface that holds the substrate P, the static electricity charged to the substrate tray 201 can be more reliably removed compared to the case where the discharging brush 500 is provided to face the surface that holds the substrate P.
- the static electricity removal brush 500 does not come into contact with the substrate tray 201. If the static electricity removal brush 500 comes into contact with the substrate tray 201 and wears down, dust may be generated inside the exposure apparatus EX due to wear, and this dust may cause exposure defects. Because the static electricity removal brush 500 does not come into contact with the substrate tray 201, dust may be generated inside the exposure apparatus EX due to wear, and this dust may cause exposure defects.
- the static electricity removal brush 500 also extends in a direction (Y-axis direction) that intersects with the direction of movement of the substrate tray 201 (X-axis direction). This makes it possible to reduce the area that the static electricity removal brush 500 occupies in the X-axis direction, so that static electricity charged on the substrate tray 201 can be removed without increasing the size of the exposure apparatus EX.
- the substrate tray 201 is provided with a discharge cord 210b electrically connected to the base member 201a. This allows the discharge cord 210b to discharge the static electricity charged on the substrate tray 201 into the air even at times when the static electricity charged on the substrate tray 201 cannot be removed by the static electricity removal brush 500.
- the substrate tray 201 supports the substrate P to be moved, and includes a conductive base member 201a, a discharging brush 210a that faces the substrate P and directs static electricity charged on the substrate P to the base member 201a, and a discharge cord 210b electrically connected to the base member 201a.
- the static electricity charged on the substrate P can be directed to the base member 201a by the discharging brush 210a and discharged by the discharge cord 210b, so that devices such as TFTs formed on the substrate P can be prevented from being destroyed by the discharge phenomenon of the static electricity charged on the substrate P.
- the mask case 600 includes a case body 601, at least a portion of which is conductive, for housing the mask M, a mask support member 603 and a discharging brush 604 for directing static electricity charged to the mask M to the conductive portion of the case body 601, and a discharge cord 602 that is electrically connected to the conductive portion and discharges static electricity charged to the conductive portion.
- the static electricity charged to the mask M can be directed to the case body 601 by the mask support member 603 and the discharging brush 604 and discharged by the discharge cord 602, so that the pattern formed on the mask M can be prevented from being destroyed by the discharge phenomenon of the static electricity charged to the mask M.
- the case body 601 includes a first case part 601a having a bottom surface BS, and a second case part 601b detachably provided to the first case part 601a and having a ceiling surface CS arranged opposite the bottom surface BS.
- the first case part 601a is conductive
- the mask support member 603 is provided on the bottom surface BS so as to face the mask M, and guides the static electricity charged on the mask M to the first case part 601a.
- the discharge cord 602 is provided on the outside of the first case part 601a, and removes (discharges) the static electricity charged on the first case part 601a.
- the static electricity charged on the mask M can be guided to the first case part 601a by the mask support member 603 and discharged by the discharge cord 602, so that the pattern formed on the mask M can be prevented from being destroyed by the discharge phenomenon of the static electricity charged on the mask M.
- the second case part 601b is conductive
- the discharge brush 604 is provided on the ceiling surface CS of the second case part 601b, faces the mask M, and guides the static electricity charged on the mask M to the second case part 601b.
- the first case part 601a and the second case part 601b are electrically connected when the second case part 601b is attached to the first case part 601a. This allows the static electricity charged on the mask M to be guided to the second case part 601b by the discharge brush 604, and discharged from the discharge cord 602 via the second case part 601b and the first case part 601a.
- the static elimination mechanism 710 includes a first electrode part 711 that is electrically connected to a conductive part (mask case support part 611) of the mask case 600, and a discharge cord 712 that is electrically connected to the first electrode part 711 and eliminates static electricity charged to the mask case 600.
- the static electricity charged to the mask case 600 can be discharged by the discharge cord 712 while the mask case 600 is being transported.
- the static elimination mechanism 710 includes an electrode member 713 electrically connected to the first electrode part 711, and when the transport cart 700 is positioned on the positioning frame 311, the electrode member 713 is arranged on the positioning frame 311 and is electrically connected to the grounded second electrode part 312. This allows the static electricity charged on the mask case 600 to be released to the ground when the transport cart 700 is positioned on the positioning frame 311 (step S15 in FIG. 10).
- the mask buffer 310 capable of storing a plurality of mask cases 600 includes a shelf portion 320 on which the mask cases 600 are placed, and a static electricity removal mechanism that removes static electricity from the mask cases 600 placed on the shelf portion 320.
- the shelf portion 320 includes a conductive case support member 320c that contacts a conductive portion (mask case support portion 611) of the mask case 600 and supports the mask case 600 from below, and a conductive frame portion 320b to which the case support member 320c is fixed.
- the static electricity removal mechanism electrically connects the case support member 320c to the frame portion 320b and grounds the frame portion 320b to remove static electricity from the mask case 600.
- step S17 in FIG. 10, step S37 in FIG. 11 This allows the static electricity charged on the mask case 600 to be discharged while the mask case 600 is housed in the mask buffer 310 (step S17 in FIG. 10, step S37 in FIG. 11), thereby preventing the pattern formed on the mask M housed in the mask case 600 from being destroyed by the static electricity discharge phenomenon.
- the buffer arm 330 which carries the mask case 600 out of the mask buffer 310 that stores the mask case 600 and carries the mask case 600 into the mask buffer 310, is provided with an arm section 331 that drives in a direction parallel to the surface of the mask M to take out the mask case 600 from the mask buffer 310 and insert the mask case 600 into the mask buffer 310, and a static electricity removal mechanism 340 that removes static electricity from the arm section 331.
- the arm section 331 is electrically connected to the mask case 600 while holding the mask case 600. This allows the static electricity charged to the mask case 600 to be removed while the mask case 600 is being transported by the buffer arm 330 (step S19 in FIG. 10), so that the pattern formed on the mask M stored in the mask case 600 can be prevented from being destroyed by the static electricity discharge phenomenon.
- the arm portion 331 includes a conductive main body portion 331a and a base portion 331c that is electrically connected to the main body portion 331a and supports the mask case 600.
- the static electricity removal mechanism 340 includes a third electrode part 341 that is electrically connected to the main body portion 331a and contacts a conductive portion (positioning portion 612) of the mask case 600 supported by the base portion 331c to guide static electricity charged on the mask case 600 to the main body portion 331a. This allows the static electricity charged on the mask case 600 to be guided to the main body portion 331a while the arm portion 331 supports the mask case 600.
- the buffer arm 330 includes a first frame 332 that holds a first drive mechanism 333 that drives the arm portion 331 in the X-axis direction, and a second frame 334 that holds a second drive mechanism 335 that drives the first frame 332 in the Y-axis direction that is approximately perpendicular to the surface of the mask M.
- the charge removal mechanism 340 includes a first charge removal brush 342 that faces the arm portion 331 and guides static electricity charged on the arm portion 331 (main body portion 331a) to the first frame 332, and a second charge removal brush 343 that faces the first frame 332 and guides static electricity charged on the first frame 332 to the second frame 334, and the second frame 334 is grounded. This allows static electricity guided from the mask case 600 to the main body portion 331a to be released to the ground via the first charge removal brush 342, the first frame 332, the second charge removal brush 343, and the second frame 334.
- the first static electricity removal brush 342 guides the static electricity charged on the arm portion 331 to the first frame 332 when the arm portion 331 is positioned closest to the mask buffer 310 in the X-axis direction, and when the arm portion 331 is positioned closest to the second frame 334 in the X-axis direction. This makes it possible to remove the static electricity charged on the mask case 600 when the mask case 600 is removed from the mask buffer 310 and when the mask case 600 is returned to the mask buffer 310.
- the mask transport mechanism 370 that transports the mask M to the main body 100 includes a holding portion 371 that holds the mask M, and a static electricity removal mechanism 380 that removes static electricity from the holding portion 371.
- the static electricity that has been charged to the mask case 600 can be removed, thereby preventing the pattern formed on the mask M stored in the mask case 600 from being destroyed by the static electricity discharge phenomenon.
- an X-ray ionizer may be provided instead of the static electricity removal brush 500.
- the X-ray ionizer is provided so that X-rays are irradiated onto the surface of the substrate tray 201 opposite to the surface that holds the substrate P.
- the first case part 601a is provided with a conductive mask support member 603, and the second case part 601b is provided with a static electricity removal brush 604.
- the static electricity removal brush 604 may be omitted.
- the mask support member 603 may be non-conductive.
- the first case portion 601a may be provided with an anti-static brush having conductive bristles that are electrically connected to the first case portion 601a and extend toward the mask M.
- the third electrode part 341 is electrically connected to the positioning portion 612 of the mask case 600, but this is not limited to the above.
- the third electrode part 341 may be provided on the base portion 331c and electrically connected to the mask case support portion 611 of the mask case 600.
- the exposure apparatus EX has been described as an exposure apparatus that uses a mask M, but the mechanism for removing static electricity from the substrate P can also be applied to a so-called maskless exposure apparatus that forms a pattern using, for example, a spatial light modulator instead of the mask M.
Landscapes
- Container, Conveyance, Adherence, Positioning, Of Wafer (AREA)
Abstract
Description
マスクケース、運搬台車、マスクバッファ、及び搬送装置に関する。 Related to mask cases, transport carts, mask buffers, and transport devices.
半導体素子及び液晶表示素子等を製造するフォトリソグラフィ工程では、マスク又はレチクルに形成されたパターンを、投影光学系を介してガラス基板又はウエハ等上に転写するために、例えばステップ・アンド・リピート方式の投影露光装置(いわゆるステッパ)、あるいはステップ・アンド・スキャン方式の投影露光装置(いわゆるスキャニング・ステッパ(スキャナとも呼ばれる))などが主として用いられている。 In the photolithography process for manufacturing semiconductor elements and liquid crystal display elements, etc., a step-and-repeat type projection exposure apparatus (known as a stepper) or a step-and-scan type projection exposure apparatus (known as a scanning stepper, also called a scanner) is mainly used to transfer a pattern formed on a mask or reticle onto a glass substrate or wafer, etc., via a projection optical system.
このような露光装置において、基板及びマスクに帯電した静電気を除去するために、様々な静電気対策がなされている(例えば、特許文献1)。 In such exposure apparatus, various anti-static measures are taken to remove static electricity that has built up on the substrate and mask (for example, Patent Document 1).
開示の態様によれば、マスクケースは、少なくとも一部が導電性を有し、マスクを収容するケース本体と、前記マスクに帯電した静電気を前記ケース本体の前記導電性を有する部分に導く導電性部材と、前記導電性を有する部分と電気的に接続され、前記導電性を有する部分に帯電した静電気を除電する第1除電部 材と、を備える。 According to the disclosed embodiment, the mask case comprises a case body, at least a portion of which is conductive, that houses the mask, a conductive member that directs static electricity charged to the mask to the conductive portion of the case body, and a first static elimination member that is electrically connected to the conductive portion and that eliminates static electricity charged to the conductive portion.
別の開示の態様によれば、運搬台車は、上記マスクケースを運搬する運搬台車であって、前記マスクケースが載置される載置部と、前記載置部に載置された前記マスクケースに帯電した静電気を除電する除電機構と、を備える。 According to another disclosed aspect, the transport cart is a transport cart for transporting the above-mentioned mask case, and includes a placement section on which the mask case is placed, and a static elimination mechanism for eliminating static electricity charged to the mask case placed on the placement section.
別の開示の態様によれば、マスクバッファは、上記マスクケースを複数ストック可能なマスクバッファであって、前記マスクケースが載置される棚部と、前記棚部に載置された前記マスクケースに帯電された静電気を除電する除電機構と、を備える。 According to another disclosed aspect, the mask buffer is capable of storing a plurality of the above-mentioned mask cases, and includes a shelf portion on which the mask cases are placed, and a static elimination mechanism that eliminates static electricity charged to the mask cases placed on the shelf portion.
別の開示の態様によれば、搬送装置は、マスクケースをストックするマスクバッファからの前記マスクケースの搬出及び前記マスクバッファへの前記マスクケースの搬入を行う搬送装置であって、前記マスクの面と平行な第1方向に駆動して、前記マスクバッファからの前記マスクケースの取り出しと、前記マスクバッファへの前記マスクケースの挿入とを行うアーム部と、前記アーム部に帯電した静電気を除電する除電機構と、を備え、前記アーム部は、前記マスクケースを保持している状態で、前記マスクケースと導通する。 According to another disclosed aspect, the transport device is a transport device that transports mask cases out of and into a mask buffer that stores mask cases, and includes an arm section that drives in a first direction parallel to the surface of the mask to remove the mask case from and insert the mask case into the mask buffer, and a static elimination mechanism that eliminates static electricity charged to the arm section, and the arm section is electrically connected to the mask case while holding the mask case.
なお、後述の実施形態の構成を適宜改良してもよく、また、少なくとも一部を他の構成物に代替させてもよい。更に、その配置について特に限定のない構成要件は、実施形態で開示した配置に限らず、その機能を達成できる位置に配置することができる。 The configuration of the embodiments described below may be modified as appropriate, and at least a portion may be replaced with other components. Furthermore, components that are not specifically limited in their placement may be placed in any position that achieves their function, not limited to the placement disclosed in the embodiments.
以下、図1~図18(B)を参照して、一実施形態に係る露光装置EXについて説明する。図1は、一実施形態に係る露光装置EXの構成を示す概略図である。 Below, an exposure apparatus EX according to one embodiment will be described with reference to Figures 1 to 18(B). Figure 1 is a schematic diagram showing the configuration of an exposure apparatus EX according to one embodiment.
露光装置EXは、例えば、有機ELディスプレイを製造する際、基板Pの上面に、TP(Touch Panel)回路やCF(Color Filter)回路を形成する際に用いられる。基板Pは、例えば、ガラス製のプレートに、蒸着等によってTFT(Thin Film Transistor、薄膜トランジスタ)を形成し、封止処理を施したものであるが、これに限られるものではない。 The exposure device EX is used, for example, when manufacturing an organic EL display, to form a TP (Touch Panel) circuit or a CF (Color Filter) circuit on the upper surface of a substrate P. The substrate P is, for example, a glass plate on which TFTs (Thin Film Transistors) are formed by deposition or the like and then sealed, but is not limited to this.
図1に示すように、露光装置EXは、本体部100と、基板搬送装置200と、マスクローダ300と、を備える。
As shown in FIG. 1, the exposure apparatus EX includes a
以下、後述するマスクMと基板Pとが投影光学系116に対して露光時にそれぞれ相対走査される方向をX軸方向とし、水平面内でX軸に直交する方向をY軸方向、X軸及びY軸に直交する方向をZ軸方向として説明を行うとともに、X軸、Y軸、及びZ軸回りの回転(傾斜)方向をそれぞれθx、θy、及びθz方向として説明を行う。
In the following description, the direction in which the mask M and substrate P (described later) are scanned relative to the projection
図2(A)は、本体部100と基板搬送装置200とを上方から見た概略図であり、図2(B)は、本体部100と基板搬送装置200とを側方から見た概略図である。図1、図2(A)及び図2(B)に示すように、基板搬送装置200は、本体部100の+X側に配置されている。なお、基板搬送装置200は、本体部100の-X側に配置されていてもよい。
FIG. 2(A) is a schematic diagram of the
<基板搬送装置200>
基板搬送装置200は、コータ/デベロッパなどの外部装置1000(図2(A)参照)と本体部100との間における基板Pの受け渡しを行う。外部装置1000は、例えば、フォーク状のロボットハンドRHを有しており、ロボットハンドRHに載置された基板Pを外部装置1000から基板搬送装置200内へ運ぶことができる。
<
The
基板搬送装置200は、基板トレイ(基板支持部材)201と、搬送機構202と、アライメント機構203と、架台部204と、を備える。
The
架台部204には、基板トレイ201が載置される。ロボットハンドRHに載置された基板Pは、外部装置1000から基板搬送装置200内へ運搬され、架台部204上に載置された基板トレイ201に載置される。
The
基板トレイ201は、本体部100の内部に基板Pを運搬及び設置するときに用いられる運搬具であり、その上面に基板Pが載置される。図3(A)は、基板トレイ201の上面図であり、図3(B)は、基板Pが上面に載置された基板トレイ201の側面図である。
The
図3(A)に示すように、基板トレイ201は、例えば、格子状の部材である。基板トレイ201は、ベース部材201aと、ベース部材201a上に設けられ、基板Pを支持する支持部材201bと、含む。本実施形態において、ベース部材201aと、支持部材201bと、は導電性を有し、ベース部材201aと支持部材201bとは電気的に接続されている。なお、本明細書において、「導電性を有する」または「導電性の」とは、静電気導電性および静電気拡散性のいずれか一方を有することを意味する。静電気導電性材料は、表面抵抗値が1×102≦Rs<1×104Ωである材料であり、静電気拡散性材料は、表面抵抗値が1×104≦Rs<1×1011Ωである材料である。
As shown in Fig. 3A, the
本実施形態において、基板トレイ201には、基板Pに帯電した静電気を取り除くための除電機構210が設けられている。
In this embodiment, the
除電機構210は、除電ブラシ210aと、放電索210bと、を備える。除電ブラシ210aは、導電性の毛束(導電性繊維)を有する。除電ブラシ210aは、ベース部材201aに電気的に接続されており、支持部材201bに支持された基板Pに帯電した静電気をベース部材201aに導く。なお、本実施形態では、支持部材201bも導電性を有し、ベース部材201aと電気的に接続されているため、支持部材201bも基板Pに帯電した静電気をベース部材201aに導くようになっているが、支持部材201bは非導電性であってもよい。
The static
放電索210bは、ベース部材201aに電気的に接続されている。放電索210bは、スタティックディスチャージャとも呼ばれ、ベース部材201aに導かれた静電気の電荷を空中に放電する。これにより、基板トレイ201に載置された基板Pに帯電した静電気を取り除くことができるため、例えば、基板Pに形成されているTFT等のデバイスが、静電気の放電現象により破壊されてしまうことを抑制することができる。
The
基板トレイ201は、例えば、G6(1850×1500mm)サイズの基板Pを、基板トレイ201からはみ出ることなく置くことができる大きさを有する。つまり、基板トレイ201は、G6(1850×1500mm)サイズの基板Pを半分に分割したG6ハーフサイズの基板Pを2つ置くことができる大きさを有する。なお、基板トレイ201に載置される基板PのサイズはG6サイズに限られるものではなく、G6サイズより大きいサイズであっても、G6サイズより小さいサイズであってもよい。なお、基板トレイ201に載置される基板PのサイズがG6サイズより大きい場合には、基板Pを基板トレイ201からはみ出ることなく置くことができるよう基板トレイ201の大きさが設計される。また、基板トレイ201に載置される基板Pの枚数は、1枚又は2枚に限られるものではなく、3枚以上であってもよい。
The
アライメント機構203は、不図示の位置検出センサにより検出された基板Pの位置に基づいて、基板トレイ201に対して基板Pを位置決めする。基板Pは、基板トレイ201の上に配置された状態で、本体部100の内部に搬送される。アライメント機構203としては、例えば、特願2022-058723に記載された構成を採用することができるが、その他の構成を採用してもよい。
The
搬送機構202は、位置決めされた基板Pを保持した基板トレイ201を本体部100に搬送する。また、搬送機構202は、本体部100の内部に配置された基板トレイ201を、本体部100から取り出す。
The
図4は、搬送機構202を+X側から見た図である。搬送機構202は、搬送アーム202aを有する。搬送アーム202aは、例えば、Y軸方向の両側から基板トレイ201を把持する。その状態で、搬送機構202は、不図示の移動機構によってX軸方向に沿って移動する。これにより、搬送機構202によって基板トレイ201を搬送する。
FIG. 4 is a view of the
搬送アーム202aには、導電性部品202bが取り付けられ、導電性部品202bは、配線を介して接地されている。図4に示すように、搬送アーム202aが基板トレイ201を把持した状態で、導電性部品202bは、基板トレイ201のベース部材201aと接触する。これにより、導電性部品202bと基板トレイ201とが電気的に接続されるので、ベース部材201aに導かれた静電気が取り除かれる。したがって、搬送機構202により基板Pを搬送している間に基板Pに静電気が帯電し、基板Pに形成されているTFT等のデバイスが静電気の放電現象により破壊されてしまうことを抑制することができる。
A
<本体部100>
次に、本体部100の構成について説明する。図2(B)に示すように、本体部100は、照明系112と、回路パターンなどが形成されたマスクMを保持するマスクステージ114と、投影光学系116と、光学定盤118と、基板Pを保持する基板ステージ装置120と、を備える。
<
Next, a description will be given of the configuration of the
照明系112は、例えば米国特許第5,729,331号明細書などに開示される照明系と同様に構成されている。照明系112は、図示しない光源(例えば、水銀ランプ)から射出された光を、それぞれ図示しない反射鏡、ダイクロイックミラー、シャッター、波長選択フィルタ、各種レンズなどを介して、露光用照明光(照明光)ILとしてマスクMに照射する。
The
マスクステージ114は、光透過型のマスクMを保持している。マスクステージ114は、例えばリニアモータを含む駆動系(不図示)を介してマスクMを照明系112(照明光IL)に対してX軸方向(スキャン方向)に所定のストロークで駆動するとともに、Y軸方向、及びθz方向に微少駆動する。マスクMの水平面内の位置情報は、例えばレーザ干渉計またはエンコーダを含むマスクステージ位置計測系(不図示)により求められる。
The
投影光学系116は、マスクステージ114の下方に配置されている。投影光学系116は、例えば米国特許第6,552,775号明細書などに開示される投影光学系と同様な構成の、いわゆるマルチレンズ投影光学系であり、例えば両側テレセントリックな等倍系で正立正像を形成する複数の光学系を備えている。
The projection
本体部100では、照明系112からの照明光ILによってマスクM上の照明領域が照明されると、マスクMを通過した照明光により、投影光学系116を介してその照明領域内のマスクMの回路パターンの投影像(部分正立像)が、基板P上の照明領域に共役な照明光の照射領域(露光領域)に形成される。そして、照明領域(照明光IL)に対してマスクMが走査方向に相対移動するとともに、露光領域(照明光IL)に対して基板Pが走査方向に相対移動することで、基板P上の1つのショット領域の走査露光が行われ、そのショット領域にマスクMに形成されたパターンが転写される。
In the
光学定盤118は、上記マスクステージ114、及び投影光学系116を支持している。
The
基板ステージ装置120は、基板Pを投影光学系116(照明光IL)に対して高精度で位置決めするためのものであり、基板Pを保持する基板ホルダ121と、基板ステージ122と、を備える。
The
図2(A)に示すように、基板ホルダ121は、収容部121aを備える。収容部121aは、基板ホルダ121に設けられた溝であり、基板トレイ201を収容する。これにより、基板Pを保持した基板トレイ201が収容部121aに収容されることにより、基板Pは、基板ホルダ121の上面に配置される。
As shown in FIG. 2(A), the
基板ステージ122は、不図示の駆動装置によって、水平面(X軸方向、及びY軸方向)に沿って所定のストロークで駆動されるとともに、6自由度方向に微少駆動される。基板ステージ装置120の構成は、特に限定されないが、例えば特開2004-14915号公報、あるいは米国特許出願公開第2012/0057140号明細書などに開示されるような、ガントリタイプの2次元粗動ステージと、該2次元粗動ステージに対して微少駆動される微動ステージとを含む、いわゆる粗微動構成のステージ装置を用いることが好ましい。
The
図2(A)に示すように、基板ステージ122の-X側の側面には、X軸に直交する反射面を有するX移動鏡(バーミラー)124Xが固定され、+Y側の側面には、Y軸に直交する反射面を有するY移動鏡124Yが固定されている。
As shown in FIG. 2(A), an X-moving mirror (bar mirror) 124X with a reflective surface perpendicular to the X-axis is fixed to the -X side of the
光学定盤118には、基板Pを保持する基板ホルダ121のX軸方向の位置及びY軸方向の位置をそれぞれ計測する不図示の第1及び第2のレーザ干渉計が取り付けられている。
First and second laser interferometers (not shown) are attached to the optical table 118 to measure the X-axis and Y-axis positions, respectively, of the
第1のレーザ干渉計は、X移動鏡124Xと、投影光学系116の近傍に固定された不図示のX固定鏡と、に計測ビームを照射する。第1のレーザ干渉計は、X固定鏡の位置を基準として、基板ホルダ121のX軸方向の位置情報を計測する。
The first laser interferometer irradiates a measurement beam onto the X
また、第2のレーザ干渉計は、Y移動鏡124Yと、投影光学系116の近傍に固定された不図示のY固定鏡と、に計測ビームを照射する。第2のレーザ干渉計は、Y固定鏡の位置を基準として、基板ホルダ121のY軸方向の位置情報を計測する。
The second laser interferometer also irradiates a measurement beam onto the Y
第1のレーザ干渉計及び第2のレーザ干渉計により計測された、基板ステージ122のXY平面内の位置情報(回転情報(ヨーイング量(θz方向の回転量θz)、ピッチング量(θy方向の回転量θy)、ローリング量(θx方向の回転量θx))を含む)に基づいて、不図示の制御装置が基板ステージ122を駆動する。
A control device (not shown) drives the
本体部100では、露光に先立ってアライメント計測(例えば、EGA等)を行い、その結果を用いて以下の手順で基板Pを露光する。まず、不図示の制御装置の指示に従い、マスクステージ114及び基板ステージ122をX軸方向に同期駆動する。これにより、基板P上の1つめのショット領域への走査露光を行う。1つめのショット領域に対する走査露光が終了すると、不図示の制御装置は、基板ステージ122を2つめのショット領域に対応する位置へ移動(ステッピング)する。そして、2つめのショット領域に対する走査露光を行う。不図示の制御装置は、同様に、基板Pのショット領域間のステッピングとショット領域に対する走査露光とを繰り返して、基板P上の全てのショット領域にマスクMのパターンを転写する。
In the
本実施形態に係る露光装置EXでは、本体部100において、基板ホルダ121に載置された基板Pに帯電した静電気を取り除くために、X線イオナイザが設けられている。また、基板搬送装置200において、架台部204に保持された基板トレイ201上に載置された基板Pに帯電した静電気を取り除くために、X線イオナイザが設けられている。なお、本体部100または基板搬送装置200のいずれか一方にX線イオナイザが設けられていてもよい。
In the exposure apparatus EX according to this embodiment, an X-ray ionizer is provided in the
しかしながら、搬送機構202が、架台部204と基板ホルダ121との間で基板Pを搬送している間に、基板Pに静電気が帯電し、帯電した静電気が放電してしまうと、当該放電現象により基板Pに形成されているTFT等のデバイスが破壊されてしまうおそれがある。そこで、本実施形態では、図2(B)に示すように、基板ホルダ121(第1領域)と架台部204(第2領域)との間を移動中も、基板Pに帯電した静電気を取り除くことができるように、より具体的には、基板Pから導かれ基板トレイ201に帯電した静電気を取り除くことができるように、除電ブラシ500が設けられている。
However, if static electricity builds up on the substrate P while the
図5(A)は、基板ホルダ121と、搬送機構202と、除電ブラシ500と、の関係を説明するための図であり、図5(B)は、除電ブラシ500と基板トレイ201との関係を説明するための図である。
FIG. 5(A) is a diagram for explaining the relationship between the
図5(A)に示すように、除電ブラシ500は、X軸方向において、本体部100と架台部204との間の領域に設けられている。図5(B)に示すように、除電ブラシ500は、基板トレイ201の移動方向(X軸方向)と直交する方向(Y軸方向)に延伸している。また、除電ブラシ500は、架台部204と基板ホルダ121との間を移動中の基板トレイ201の基板Pを保持している面と反対側の面と対向するように設けられている。また、除電ブラシ500は、接地されている。
As shown in FIG. 5(A), the static
除電ブラシ500は、基板トレイ201が除電ブラシ500の上方にあるときに、基板トレイ201に向かって延伸する(+Z方向に延伸する)導電性の毛束502を有し、基板Pから基板トレイ201のベース部材201aに導かれた静電気を取り除く。これにより、搬送機構202が、架台部204と基板ホルダ121との間で基板Pを搬送している間に、基板Pに帯電した静電気の放電現象により基板Pに形成されているTFT等のデバイスが破壊されてしまうことを抑制することができる。
The static
図5(B)に示すように、除電ブラシ500は、導電性の毛束502が、基板トレイ201のベース部材201aの下面(基板トレイ201の基板Pを支持している面と反対側の面)と接触しないように設けられている。搬送機構202によって搬送されている基板トレイ201と基板Pとは、自重により撓む。したがたって、基板トレイ201と基板Pとは、Y軸方向においてその中央部が、両端部よりも下方に位置する。そのため、除電ブラシ500の導電性の毛束502は、Y軸方向の中央部においてその長さが短く、両端部に近づくにつれて長くなるようになっている。これにより、除電ブラシ500の導電性の毛束502が、基板トレイ201と接触しないようになっている。毛束502が基板トレイ201と接触して摩耗すると、摩耗により露光装置EX内に塵が発生し、当該塵が、露光不良を引き起こしてしまうおそれがある。除電ブラシ500の導電性の毛束502の長さを上記のように構成することで、露光不良の発生を抑制できる。
As shown in FIG. 5B, the
なお、除電ブラシ500に加えて、又は、除電ブラシ500に代えて、図6に示すように、接地された除電ブラシ500Aを基板ステージ122に設けてもよい。この場合にも、除電ブラシ500Aは、基板トレイ201の移動方向(X軸方向)と直交する方向(Y軸方向)に延伸し、架台部204と基板ホルダ121との間を移動中の基板トレイ201の基板Pを保持する面と反対側の面と対向するように設けられていればよい。また、基板トレイ201と接触しないように、除電ブラシ500Aの導電性の毛束は、Y軸方向の中央部においてその長さが短く、両端部に近づくにつれて長くなるようにすればよい。
In addition to the static
なお、基板トレイ201ではなく、例えば、図2(A)に示すフォーク上のロボットハンドRHによって、基板Pを基板ホルダ121に搬送してもよい。ロボットハンドRHによって基板Pを基板ホルダ121に搬送する場合、基板搬送装置200は省略される。
In addition, instead of the
図7(A)~図7(C)は、本実施形態の変形例に係るロボットハンドRH-Aについて説明するための図である。図7(A)は、ロボットハンドRH-Aを+Z方向から見た図であり、図7(B)は、基板Pが載置されたロボットハンドRH-Aを+Z方向から見た図であり、図7(C)は、基板Pが載置されたロボットハンドRH-Aを+Z方向から見た図である。 FIGS. 7(A) to 7(C) are diagrams for explaining a robot hand RH-A according to a modified example of this embodiment. FIG. 7(A) is a diagram of the robot hand RH-A viewed from the +Z direction, FIG. 7(B) is a diagram of the robot hand RH-A with substrate P placed thereon viewed from the +Z direction, and FIG. 7(C) is a diagram of the robot hand RH-A with substrate P placed thereon viewed from the +Z direction.
図7(A)及び図7(C)に示すように、ロボットハンドRH-Aは、導電性のベース部材801と、ベース部材801上に設けられた導電性の支持部材802と、除電ブラシ803と、を備える。支持部材802は、ベース部材801に電気的に接続されている。また、除電ブラシ803は、導電性の毛束を有し、導電性の毛束は、ベース部材801に電気的に接続されている。これにより、基板Pに帯電した静電気が、支持部材802と除電ブラシ803とを介してベース部材801に導かれる。
As shown in Figures 7(A) and 7(C), the robot hand RH-A comprises a
ロボットハンドRH-Aが本体部100まで基板Pを搬送する経路上、及び本体部100から基板Pを所定の位置まで搬送する経路上に、除電ブラシ500を配置する。これにより、ベース部材801に導かれた静電気を除電ブラシ500を介して地面に逃がすことができる。このため、基板Pに帯電した静電気の放電現象により、基板Pに形成されたTFT等のデバイスが破壊されてしまうことを抑制することができる。
The static
なお、支持部材802は非導電性であってもよい。また、ロボットハンドRH-Aのベース部材801に電気的に接続する放電索を設けてもよい。
The
<マスクローダ300>
図8及び図9は、マスクローダ300の構成について説明するための図である。なお、図8では、一部の構成を断面図にて示している。
<
8 and 9 are diagrams for explaining the configuration of the
図8及び図9に示すように、マスクローダ300は、マスクバッファ310と、ペリクル異物検査部(以下PPDという)390と、バッファアーム330と、中継テーブル350と、マスク搬送機構370と、を備える。
As shown in Figures 8 and 9, the
マスクバッファ310は、マスクMが収納されているマスクケース600を一時的に保管する。マスクバッファ310は、マスクケース600を保管するための複数のスロットSLTを有する。
The
PPD390は、マスクバッファ310の上部に配置されている。PPD390はマスクMが有するペリクルPLCL(図12参照)に付着した異物の有無と、マスクMのペリクルPLCLが設けられた面と反対側の面に付着した異物の有無と、を検査する。PPD390は、PPDアーム391を有する。
PPD390 is disposed above
中継テーブル350は、マスクMの交換時に、搬送中のマスクMを一時的に保持する。中継テーブル350は、本体部100のマスクステージ114にロードするマスクMを置くためのテーブル(不図示)と、本体部100のマスクステージ114からアンロードされたマスクMを置くためのテーブル(不図示)と、を有する。
The relay table 350 temporarily holds the mask M being transported when the mask M is replaced. The relay table 350 has a table (not shown) for placing the mask M to be loaded onto the
バッファアーム330は、マスクバッファ310からのマスクケース600の搬出入及び搬送を行う。マスク搬送機構370は、マスクMを中継テーブル350から本体部100へ搬送したり、その逆に本体部100から中継テーブル350へ搬送したりする。また、マスク搬送機構370は、PPDアーム391へマスクMを搬送したり、PPDアーム391からマスクMを受け取ったりする。また、マスク搬送機構370は、バッファアーム330に対してもマスクMの受け渡しを行う。
The
図10及び図11を参照して、マスクローダ300で実行される処理について説明する。図10は、マスクMをマスクステージ114に搭載するまでの一連の処理を示すフローチャートであり、図11は、マスクMをマスクステージ114から取り外した後の一連の処理を示すフローチャートである。
The processing executed by the
図10に示す処理では、まず、パターンが形成されたマスクMを後述するマスクケース600に収納する(ステップS11)。次に、マスクMが収納されているマスクケース600を、後述する運搬台車700に搭載する(ステップS13)。マスクケース600が載置された運搬台車700は、マスクバッファ310に挿入される(ステップS15)。これにより、マスクケース600がマスクバッファ310に挿入される。
In the process shown in FIG. 10, first, the mask M on which the pattern is formed is stored in the
マスクバッファ310に挿入されたマスクケース600は、マスクバッファ310の各スロットSLTに収納される(ステップS17)。
The
マスクバッファ310に収納されたマスクケース600内に収容されたマスクMを使用する場合、マスクMをマスクケース600ごとバッファアーム330で搬送する(ステップS19)。
When using the mask M housed in the
バッファアーム330で搬送されたマスクケース600から、マスク搬送機構370がマスクMを取り出し搬送する(ステップS20)。マスクMは、PPD390が有するPPDアーム391に受け渡され、PPD390において、マスクMが有するペリクルPLCLに付着した異物の有無と、マスクMのペリクルPLCLが設けられた面と反対側の面に付着した異物の有無と、が検査される(ステップS21)。
The
PPD390での検査が終了すると、マスク搬送機構370により、マスクMが中継テーブル350を経由して、マスクステージ114まで搬送される(ステップS23)。その後、マスクMは、マスクステージ114に搭載され(ステップS25)、図10の処理が終了する。
When the inspection by the
一方、図11の処理は、基板Pへの露光が終了すると開始される。まず、マスクMがマスクステージ114から取り外される(ステップS31)。 On the other hand, the process in FIG. 11 begins when exposure of the substrate P is completed. First, the mask M is removed from the mask stage 114 (step S31).
次に、取り外されたマスクMは、マスク搬送機構370により搬送される(ステップS33)。マスク搬送機構370により搬送されたマスクMは、マスクケース600に収納される(ステップS35)。
Then, the removed mask M is transported by the mask transport mechanism 370 (step S33). The mask M transported by the
マスクケース600は、バッファアーム330により搬送され、マスクバッファ310に収納される(ステップS37)。
The
マスクバッファ310に収納されたマスクケース600は、マスクバッファ310から取り出されると、運搬台車700へ搭載される(ステップS39)。マスクケース600は、運搬台車700にて所定の場所まで運搬され、運搬台車700から取り外される(ステップS41)。運搬台車700から取り外されたマスクケース600からマスクMを取り出し(ステップS43),図11の処理が終了する。
The
図10および図11に示すマスクMに係る一連の処理において、マスクMをPPD390に搬入したとき(図10:ステップS21)、マスクMをマスクステージ114に搭載したとき(図10:ステップS25)、マスクMをマスクステージ114から取り外すとき(図11:ステップS31)、及びマスクMをマスクケース600から取り出すとき(図11:ステップS43)には、従来からX線イオナイザ等によって、マスクMに帯電した静電気の除電が行われている。本実施形態では、それ以外のステップにおいても、マスクMに帯電した静電気を除電することで、マスクMに形成されたパターンが静電気の放電現象によって破壊されてしまうことをより抑制する。 In the series of processes related to the mask M shown in Figures 10 and 11, when the mask M is carried into the PPD 390 (Figure 10: step S21), when the mask M is mounted on the mask stage 114 (Figure 10: step S25), when the mask M is removed from the mask stage 114 (Figure 11: step S31), and when the mask M is taken out of the mask case 600 (Figure 11: step S43), static electricity charged to the mask M is conventionally removed using an X-ray ionizer or the like. In this embodiment, static electricity charged to the mask M is also removed in other steps, thereby further preventing the pattern formed on the mask M from being destroyed by the static electricity discharge phenomenon.
<マスクケース600>
次に、本実施形態に係るマスクケース600について説明する。図12は、マスクケース600の構造を説明するための断面図である。なお、図12において、一部要素のハッチングを省略している。
<
Next, a description will be given of the
図12に示すように、マスクケース600は、マスクを収容するケース本体601と、放電索602と、を備える。
As shown in FIG. 12, the
ケース本体601は、底面BSを有する第1ケース部601aと、第1ケース部601aに対して着脱可能に設けられ、底面BSに対向配置される天井面CSを有する第2ケース部601bと、を含む。第1ケース部601aと第2ケース部601bとは、導電性を有する。
The
第1ケース部601aは脚部610を有し、脚部610には、マスクケース支持部611が取り付けられている。マスクケース支持部611は導電性を有し、第1ケース部601a(脚部610)と電気的に接続されている。
The
第1ケース部601aの底面BSには、マスクMを支持するマスク支持部材603が設けられている。マスク支持部材603は、マスクMにおいてパターンが形成された領域を保護するペリクルPLCLが底面BSに接触しないように、マスクMを支持する。マスク支持部材603は導電性を有し、第1ケース部601aに電気的に接続されている。したがって、マスク支持部材603とマスクケース支持部611とは電気的に接続されている。
A
放電索602は、第1ケース部601aと電気的に接続されている。したがって、マスク支持部材603と放電索602とは電気的に接続されている。これにより、マスクMに帯電した静電気は、マスク支持部材603によって導電性の第1ケース部601aに導かれ、第1ケース部601aに帯電した静電気が放電索602によって放電される。これにより、マスクMに帯電した静電気の放電現象によって、マスクMに形成されたパターンが破壊されてしまうことを抑制することができる。
The
第2ケース部601bの天井面CSには、導電性の毛束を有する除電ブラシ604が設けられている。除電ブラシ604は、第2ケース部601bと電気的に接続されている。除電ブラシ604は、マスク支持部材603が支持するマスクMと対向し、マスクMに帯電した静電気を第2ケース部601bに導く。
A
第2ケース部601bが第1ケース部601aに装着された状態において、第1ケース部601aと第2ケース部601bとは電気的に接続される。これにより、マスクMから第2ケース部601bに導かれた静電気は、第1ケース部601aによって放電索602に導かれ、放電索602から放電される。これにより、マスクMに帯電した静電気の放電現象によって、マスクMに形成されたパターンが破壊されてしまうことを抑制することができる。
When the
第1ケース部601aと第2ケース部601bとは、例えばアルミニウム製であり、その表面に非導電性の被膜(さび止め用の被膜等)が形成されている。したがって、本実施形態において、第2ケース部601bが第1ケース部601aに装着された状態において、第1ケース部601aと第2ケース部601bとが接触する部分の被膜は除去されている。また、第1ケース部601aにおいて、マスク支持部材603が取り付けられる部分の被膜は除去されている。また、第1ケース部601aにおいて、マスクケース支持部611が取り付けられる部分の被膜は除去されている。また、第2ケース部601bにおいて、除電ブラシ604が配置される部分の被膜は除去されている。これにより、電気的接続を確保することができる。なお、図12では、第1ケース部601aにおいて被膜が除去されている部分を被膜除去領域615aとして示し、第2ケース部601bにおいて被膜が除去されている部分を被膜除去領域615bとして示している。
The
なお、被膜を除去するのではなく、バスバー等の導電性の電極部材を設けてもよい。図13は、マスクケース600の別の構成例を示す断面図である。
In addition, instead of removing the coating, a conductive electrode member such as a bus bar may be provided. Figure 13 is a cross-sectional view showing another example of the configuration of the
図13に示すマスクケース600では、第1ケース部601aの底面BSの一部にバスバー等の電極部材605aが設けられ、マスク支持部材603が電極部材605aに電気的に接続されている。また、第1ケース部601aに設けた電極部材605aと、放電索602と、を電気的に接続するバスバー等の電極部材605bが設けられている。
In the
また、第2ケース部601bの天井面CSにバスバー等の電極部材605cが設けられ、除電ブラシ604が電極部材605cに電気的に接続されている。第2ケース部601bが第1ケース部601aに装着された状態で、電極部材605cと電極部材605aとを電気的に接続するバスバー等の電極部材605dが設けられている。電極部材605dは、弾性を有しており、これにより電極部材605cと電極部材605aとの電気的接続を確実にできる。
In addition, an
また、第1ケース部601aの脚部610には、バスバー等の電極部材605eが設けられており、マスクケース支持部611が電極部材605eに電気的に接続されている。このように、電極部材によって各部材間の電気的接続を実現し、マスクMに帯電した静電気を放電索602から放電するようにしてもよい。
Furthermore, an
マスクMを収納したマスクケース600は、運搬台車700によりマスクバッファ310に運搬され、マスクバッファ310にストックされる。
The
<運搬台車700>
図14(A)は、運搬台車700の概要を示す図である。図14(A)に示すように、運搬台車700は、マスクケース600が載置される載置部701と、載置部701に取り付けられた車輪702と、運搬台車700を移動させるときに作業者が把持するハンドル部703と、載置部701の前方側に配置されたメカニカルストッパ704と、を備える。運搬台車700は、載置部701に載置されたマスクケース600に帯電した静電気を除電する除電機構710を更に備える。
<
Fig. 14(A) is a diagram showing an overview of the
除電機構710は、第1電極部品711と、放電索712と、電極部材713と、を備える。
The
図15(A)及び図15(B)は、除電機構710の構造について説明するための図である。
FIGS. 15(A) and 15(B) are diagrams for explaining the structure of the static
第1電極部品711は、例えば、コンタクトプローブであり、図15(A)に示すように、圧縮バネ等の付勢部材715によって、上方に向かって付勢されている。これにより、第1電極部品711の先端は、載置部701のうち、マスクケース600のマスクケース支持部611と接触する接触面701aよりも突出している。
The
図15(B)に示すように、マスクケース600が載置部701に載置されると、第1電極部品711とマスクケース支持部611とが接触し、電気的に接続される。
As shown in FIG. 15(B), when the
第1電極部品711は、放電索712に電気的に接続されている。これにより、マスクケース600に帯電した静電気を第1電極部品711により放電索712に導き、放電索712から放電することができる。これにより、マスクMが収納されたマスクケース600を運搬台車700で運搬している間に、マスクMに帯電した静電気の放電現象によってマスクMに形成されたパターンが破壊されてしまうことを抑制することができる。
The
また、第1電極部品711は、メカニカルストッパ704の前方側に設けられた電極部材713に電気的に接続されている。電極部材713は、導電性部材であり、例えば、バスバーである。
The
図9に示すように、マスクケース600をマスクバッファ310に収納する場合、運搬台車700は、マスクバッファ310が備える位置決めフレーム311に乗り上げることで位置決めされる。位置決めフレーム311には、図14(A)に示すように、メカニカルストッパ315が設けられている。運搬台車700のメカニカルストッパ704が位置決めフレーム311のメカニカルストッパ315に接触することにより、運搬台車700が位置決めフレーム311に位置決めされる。
As shown in FIG. 9, when storing the
図14(B)は、メカニカルストッパ315の拡大図である。メカニカルストッパ315には、第2電極部品312と、ショックアブソーバ等の衝撃吸収部品313と、が設けられている。
FIG. 14(B) is an enlarged view of the
衝撃吸収部品313は、運搬台車700のメカニカルストッパ704がメカニカルストッパ315に接触するときの衝撃を吸収する。
The
第2電極部品312は、例えば、コンタクトプローブであり、位置決めフレーム311上で運搬台車700が位置決めされたときに、運搬台車700の電極部材713と電気的に接続される。本実施形態では、第2電極部品312は、圧縮バネ等の付勢部材316によって、第2電極部品312の先端が、メカニカルストッパ面315aよりも突出するように付勢されている。これにより、メカニカルストッパ315とメカニカルストッパ704とが接触して運搬台車700が停止するときに、衝撃吸収部品313の反力によって運搬台車700が押し戻されたとしても、第2電極部品312と電極部材713との接触(電気的接続)を保つことができる。
The
第2電極部品312は、接地されている。このため、運搬台車700が位置決めフレーム311に位置決めされたときに、マスクケース600に帯電した静電気を第1電極部品711、電極部材713、及び第2電極部品312を介して地面に逃がすことができる。これにより、静電気の放電現象によってマスクMに形成されたパターンが破壊されてしまうことを抑制することができる。
The
運搬台車700が、位置決めフレーム311に位置決めされると、載置部701に載置されたマスクケース600がマスクバッファ310に搬入される。
When the
<マスクバッファ310>
図8に示すように、マスクバッファ310は、マスクケース600が格納される複数のスロットSLTを備え、各スロットSLTには、マスクケース600が載置される棚部320が設けられている。
<
As shown in FIG. 8, the
図16(A)及び図16(B)は、各棚部320の構成を説明するための図であり、図16(A)は、マスクバッファ310の棚部320を+Z方向から見た場合の概略図であり、図16(B)は、図16(A)のA-A線断面図である。
FIGS. 16(A) and 16(B) are diagrams for explaining the configuration of each
図16(A)及び図16(B)に示すように、棚部320は、マスクケース600を支持する一対の支持部320aと、支持部320aが固定されたフレーム部320bと、を有する。
As shown in Figures 16(A) and 16(B), the
一対の支持部320aは、Y軸方向に離間して配置され、各支持部320aは、X軸方向に延伸している。各支持部320aには、マスクケース600の第1ケース部601aのマスクケース支持部611と接触し、マスクケース600を下方から支持するケース支持部材320cが複数配置されている。
The pair of
支持部320a、フレーム部320b、及びケース支持部材320cは、導電性を有する。支持部320aとフレーム部320bとは、電気的に接続されており、ケース支持部材320cと支持部320aとは、電気的に接続されている。これにより、ケース支持部材320cとフレーム部320bとが電気的に接続される。なお、本実施形態において、支持部320aの表面と、フレーム部320bの表面とには、非導電性の被膜(例えば、さび止め用の被膜等)が形成されている。したがって、支持部320aおよびフレーム部320bにおいて、電気的な接続をとる部分の被膜は除去されている。図16(B)では、支持部320aにおいて被膜が除去されている部分を被膜除去領域321aとして示し、フレーム部320bにおいて被膜が除去されている部分を被膜除去領域321bとして示している。
The
フレーム部320bは、接地されている。これにより、棚部320にマスクケース600が載置されると、マスクケース600に帯電した静電気が、ケース支持部材320cと支持部320aを介してフレーム部320bに導かれ、地面に逃がされる。これにより、マスクケース600内に収容されたマスクM及びマスクケース600に帯電した静電気の放電現象によって、マスクMに形成されたパターンが破壊されてしまうことを抑制することができる。すなわち、マスクバッファ310では、マスクケース600と接触するケース支持部材320c、ケース支持部材320cと電気的に接続する支持部320a、及び支持部320aと電気的に接続され、接地されているフレーム部320bが、マスクケース600に帯電した静電気を除電する除電機構として機能する。
The
なお、例えば、支持部320aのマスクケース600と対向する面(+Z側の面)に、マスクケース600に向かって伸びる導電性の毛束を有する除電ブラシを設けてもよい。この場合、導電性の毛束は、支持部320aと電気的に接続される。これにより、除電ブラシによって、マスクケース600に帯電した静電気をフレーム部320bに導くことができる。除電ブラシを設ける場合、ケース支持部材320cは、非導電性であってもよい。
For example, a static elimination brush having conductive bristles extending towards the
<バッファアーム330>
マスクバッファ310にストックされたマスクケース600は、バッファアーム330により搬出入される。図17は、バッファアーム330の構成を示す概略図である。バッファアーム330は、X軸方向に駆動して、マスクバッファ310(より詳細には棚部320)からのマスクケース600の取り出しと、マスクバッファ310へのマスクケース600の挿入とを行うアーム部331と、アーム部331に帯電した静電気を除電する除電機構340と、を備える。
<
The
アーム部331は、導電性の本体部331aと、位置決め機構331bと、台座部331cと、を備える。台座部331cは、マスクケース600のマスクケース支持部611を支持する。位置決め機構331bは、マスクケース600が有する位置決め部612が備える凹部612aと係合し、マスクケース支持部611が台座部331cによって支持されるよう、マスクケース600のバッファアーム330に対する位置を決定する。なお、位置決め部612は、導電性を有し、マスクケース600の第1ケース部601aと電気的に接続されている。
The
アーム部331は、導電性の第1フレーム332に保持された、リニアガイド等の第1駆動機構333により矢印AR31で示すようにX軸方向に駆動される。これにより、アーム部331は、スロットSLT内に進入することができる。第1フレーム332は、導電性の第2フレーム334に保持された、リニアガイド等の第2駆動機構335により、矢印AR32で示すようにZ軸方向に駆動される。これにより、Z軸方向において異なる位置にある各スロットSLTから、マスクケース600を取り出すことが可能となる。なお、スロットSLTからマスクMを取り出す場合、第2ケース部601bはスロットSLT内に残り、マスクMが収容された第1ケース部601aのみが、アーム部331によって取り出される。
The
除電機構340は、第3電極部品341と、第1除電ブラシ342と、第2除電ブラシ343と、を備える。
The
第3電極部品341は、例えば、コンタクトプローブであり、マスクケース600がアーム部331に載置されたときに、マスクケース600(位置決め部612)に接触する。これにより、マスクケース600と第3電極部品341とは、電気的に接続される。第3電極部品341は、圧縮バネ等の付勢部材345によって、第3電極部品341の先端が、マスクケース600がアーム部331に載置されたときにマスクケース600の位置決め部612が存在する位置よりも上方にあるように付勢されている。これにより、マスクケース600と第3電極部品341との導通をより確実にとることができる。第3電極部品341は、本体部331aに電気的に接続されている。これにより、マスクケース600に帯電した静電気を、本体部331aに導くことができる。
The
第1除電ブラシ342は、本体部331aに向かって延伸する導電性の毛束を有する。第1除電ブラシ342は、第1フレーム332に電気的に接続されている。本実施形態において、アーム部331の本体部331aの表面には非導電性の被膜が形成されているが、図17において点線のハッチングで示す部分においては、被膜が除去されている。具体的には、本体部331aのうち、-X側の端部の下面と、中央部付近の下面とにおいて、被膜が除去され、本体部331aの材料が露出している。-X側の端部の下面において被膜が除去されている領域を被膜除去領域336aとし、中央部付近の下面において被膜が除去されている領域を被膜除去領域336bとすると、第1除電ブラシ342は、被膜除去領域336aおよび被膜除去領域336bと対向したときに、本体部331aに帯電した静電気を第1フレーム332に導くことができる。言い換えると、第1除電ブラシ342は、アーム部331が、X軸方向において最もマスクバッファ310側に位置しているときと、X軸方向において最も第2フレーム334側に位置しているときに、本体部331a(アーム部331)に帯電した静電気を第1フレーム332に導く。
The first static
第2除電ブラシ343は、第1フレーム332に向かって延伸する導電性の毛束を有する。第2除電ブラシ343は、第2フレーム334に電気的に接続されている。本実施形態において、第1フレーム332の表面には、非導電性の被膜が形成されているが、図17において点線のハッチングで示す箇所の被膜が除去されている。具体的には、第1フレーム332のうち、-Z側の端部において被膜が除去され、第1フレーム332の材料が露出している。第1フレーム332のうち被膜が除去されている領域を被膜除去領域332aとすると、第2除電ブラシ343は、被膜除去領域332aと対向したときに、第1フレーム332に帯電した静電気を第2フレーム334に導くことができる。なお、図17では、1つの第2除電ブラシ343を図示しているが、本実施形態では、第2除電ブラシ343は、第1フレーム332がZ軸方向において最も高い位置にあるとき及び最も低い位置にあるときに、第1フレーム332の被膜除去領域332aと対向するように少なくとも2箇所に設けられている。
The second static
なお、第2除電ブラシ343は、第1フレーム332がZ軸方向において最も高い位置にあるとき及び最も低い位置にあるときの少なくとも一方のタイミングで、第1フレーム332の被膜除去領域332aと対向するように設けられていてもよい。また、第2除電ブラシ343は、アーム部331のZ軸方向の停止位置(各スロットSLTに対応する位置)と対応するように、Z軸方向に離間して、複数個所に設けられていてもよい。
The second static
第2フレーム334は接地されている。これにより、マスクケース600に帯電した静電気を、第3電極部品341、本体部331a、第1除電ブラシ342、第1フレーム332、第2除電ブラシ343、及び第2フレーム334を介して地面に逃がすことができる。上述したように、第1除電ブラシ342は、アーム部331が、X軸方向において最もマスクバッファ310側に位置しているときと、X軸方向において最も第2フレーム334側に位置しているときに、本体部331a(アーム部331)に帯電した静電気を第1フレーム332に導く。したがって、マスクケース600を棚部320から取り出したとき、マスクケース600を棚部320に戻すときに、マスクケース600に帯電した静電気を除去することができる。
The
バッファアーム330により、Z軸方向の所定位置まで運ばれた第1ケース部601a内に収容されたマスクMは、マスク搬送機構370によりマスクケース600(第1ケース部601a)から取り出される。PPDアーム391がマスク搬送機構370の下方まで移動し、マスク搬送機構370からPPDアーム391にマスクMが受け渡される。マスクMを載せたPPDアーム391は、PPD390内に移動する。PPD390内では、マスクMが有するペリクルPLCLに付着した異物の有無と、マスクMのペリクルPLCLが設けられた面と反対側の面に付着した異物の有無と、が検査される。異物検査が終了したマスクMを載せたPPDアーム391はマスク搬送機構370の下に移動し、マスクMがPPDアーム391からマスク搬送機構370に受け渡される。
The mask M housed in the
マスクMを保持したマスク搬送機構370は、マスクMを本体部100のマスクステージ114まで移動させる。
The
<マスク搬送機構370>
図18(A)は、本実施形態に係るマスク搬送機構370の外観を示す図であり、図18(B)は、マスク搬送機構370の構成を示す概略図である。図18(A)及び図18(B)に示すように、マスク搬送機構370は、マスクMを保持する一対の保持部371と、保持部371に帯電した静電気を除電する除電機構380と、を備える。なお、図18(B)では、一対の保持部371のうち一方を図示している。
<
Fig. 18(A) is a diagram showing the appearance of a
保持部371は、マスクMと接触し、マスクMを支持する導電性の支持部371aと、支持部371aが接続され、Y軸方向に駆動可能なアーム部371bと、を備える。アーム部371bの一部は、筐体372内に収容されている。アーム部371bは、例えば、ガイド付きシリンダ等のアクチュエータ373により、Y軸方向に駆動される。アクチュエータ373も、筐体372内に収容されている。
The holding
支持部371aと、アーム部371bとは、導電性を有する。除電機構380は、支持部371aとアーム部371bとを電気的に接続し、支持部371aに帯電した静電気をアーム部371bに導く接続部381と、アーム部371bに帯電した静電気を筐体372に導く除電ブラシ382と、を含む。
The
本実施形態において、支持部371aは、矢印AR41で示すように、軸371cまわりに回転可能となっている。そのため、接続部381は、支持部371aとアーム部371bとの電気的接続を確実にするよう、弾性を有する。接続部381として、例えば、金属製の板バネを使用することができる。アーム部371bは、導電性の部材の表面に非導電性の被膜が形成されているが、接続部381が接続される部分371eについては被膜が除去されている。これにより、接続部381は、支持部371aに帯電した静電気をアーム部371bに導くことができる。
In this embodiment, the
また、例えば、アーム部371bは、支持部371aがマスクMを保持しているときに除電ブラシ382と対向する部分371fについては、被膜が除去されている。これにより、支持部371aがマスクMを保持しているときに、アーム部371bに帯電した静電気を筐体372に導くことができる。
Also, for example, the coating of the
筐体372は、導電性を有し、接地されている。このため、マスク搬送機構370がマスクMを搬送している間、マスクMに帯電した静電気を、支持部371a、アーム部371b、及び除電ブラシ382を介して筐体372に導き、筐体372から地面に逃すことができる。これにより、マスクMに帯電した静電気の放電現象により、マスクMに形成されたパターンが破壊されることを抑制することができる。なお、アーム部371bが複数の部材から構成されている場合、複数の部材の接続部分においては、被膜が除去され電気的接続が実現されている。
The
以上、詳細に説明したように、本実施形態によれば、露光装置EXは、基板Pを支持する基板トレイ201が移動する間に、基板トレイ201に帯電した静電気を除電する除電ブラシ500を備える。基板トレイ201は、導電性のベース部材201aと、基板トレイ201が支持する基板Pと対向し、基板Pに帯電した静電気をベース部材201aに導く除電ブラシ210aと、導電性の支持部材201bと、を有し、除電ブラシ500は、ベース部材201aに導かれた静電気を除電する。これにより、基板Pを基板トレイ201を用いて搬送している間に、基板Pに帯電した静電気の放電現象により基板Pに形成されているTFT等のデバイスが破壊されてしまうことを抑制することができる。
As described above in detail, according to this embodiment, the exposure apparatus EX is equipped with a discharging
また、本実施形態において、除電ブラシ500は、基板Pに対して除電を行う本体部100と、架台部204との間に位置する領域に設けられ、基板トレイ201が当該領域を移動する間に、基板トレイ201に帯電した静電気を除電する。本実施形態において、基板ホルダ121に載置された基板Pは、本体部100に設けられたX線イオナイザにより除電されるが、除電ブラシ500を設けない場合、本体部100と架台部204との間で基板Pを搬送している間に基板Pに帯電した静電気(基板トレイ201に帯電した静電気)を逃す手段がなく、基板Pに帯電した静電気の放電現象により基板Pに形成されているTFT等のデバイスが破壊されてしまうおそれがある。本体部100と、架台部204との間に位置する領域に除電ブラシ500を設けることで、本体部100と架台部204との間で基板Pを搬送している間に、基板Pから基板トレイ201に導かれた静電気を除電することができるので、基板Pに帯電した静電気の放電現象により基板Pに形成されているTFT等のデバイスが破壊されてしまうことを抑制することができる。
In addition, in this embodiment, the static
また、本実施形態において、除電ブラシ500は、基板トレイ201の基板Pを保持している面と反対側の面と対向するように設けられる。基板トレイ201の基板Pを保持している面は、基板Pに覆われているため、基板Pを保持している面と対向するように除電ブラシ500を設けても、基板トレイ201に帯電した静電気を十分に取り除くことができないおそれがある。除電ブラシ500を基板トレイ201の基板Pを保持している面と反対側の面と対向するように設けることで、基板Pを保持している面と対向するように除電ブラシ500を設ける場合と比較して、基板トレイ201に帯電した静電気をより確実に除電することができる。
In addition, in this embodiment, the discharging
また、本実施形態において、除電ブラシ500は、基板トレイ201と接触しない。除電ブラシ500が基板トレイ201と接触して摩耗すると、摩耗により露光装置EX内に塵が発生し、当該塵が、露光不良を引き起こしてしまうおそれがある。除電ブラシ500が、基板トレイ201と接触しないので、摩耗により露光装置EX内に塵が発生し、当該塵が、露光不良を引き起こしてしまうことを抑制できる。
In addition, in this embodiment, the static
また、除電ブラシ500は、基板トレイ201の移動方向(X軸方向)と交差する方向(Y軸方向)に延在する。これにより、除電ブラシ500がX軸方向に占める領域を小さくできるので、露光装置EXのサイズを大きくすることなく、基板トレイ201に帯電した静電気を除電することができる。
The static
また、本実施形態において、基板トレイ201は、ベース部材201aと電気的に接続された放電索210bを備える。これにより、除電ブラシ500によって基板トレイ201に帯電した静電気を除電できないタイミングであっても、放電索210bによって基板トレイ201に帯電した静電気を空中に放電することができる。
In addition, in this embodiment, the
また、本実施形態によれば、基板トレイ201は、移動される基板Pを支持する基板トレイ201であって、導電性のベース部材201aと、基板Pと対向し、基板Pに帯電した静電気をベース部材201aに導く除電ブラシ210aと、ベース部材201aに電気的に接続された放電索210bと、を備える。これにより、基板Pが基板トレイ201に支持されている間、基板Pに帯電した静電気を、除電ブラシ210aによってベース部材201aに導き、放電索210bにより放電できるので、基板Pに帯電した静電気の放電現象により基板Pに形成されているTFT等のデバイスが破壊されてしまうことを抑制することができる。
Furthermore, according to this embodiment, the
また、本実施形態によれば、マスクケース600は、少なくとも一部が導電性を有し、マスクMを収容するケース本体601と、マスクMに帯電した静電気をケース本体601の導電性を有する部分に導くマスク支持部材603及び除電ブラシ604と、導電性を有する部分と電気的に接続され、導電性を有する部分に帯電した静電気を除電する放電索602と、を備える。これにより、マスクMがマスクケース600に収納されている間(図10のステップS11、図11のステップS35、図11のステップS41)、マスクMに帯電した静電気をマスク支持部材603及び除電ブラシ604によってケース本体601に導き、放電索602により放電できるので、マスクMに形成されたパターンがマスクMに帯電した静電気の放電現象により破壊されてしまうことを抑制できる。
Furthermore, according to this embodiment, the
また、本実施形態において、ケース本体601は、底面BSを有する第1ケース部601aと、第1ケース部601aに対して着脱可能に設けられ、底面BSに対向配置される天井面CSを有する第2ケース部601bと、を含む。第1ケース部601aは導電性を有し、マスク支持部材603は、マスクMと対向するよう底面BSに設けられ、マスクMに帯電した静電気を第1ケース部601aに導く。放電索602は、第1ケース部601aの外側に設けられ、第1ケース部601aに帯電した静電気を除電(放電)する。これにより、マスクMがマスクケース600に収納されている間、マスクMに帯電した静電気をマスク支持部材603によって第1ケース部601aに導き、放電索602により放電できるので、マスクMに形成されたパターンがマスクMに帯電した静電気の放電現象により破壊されてしまうことを抑制できる。
In this embodiment, the
また、本実施形態において、第2ケース部601bは導電性を有し、除電ブラシ604は、第2ケース部601bの天井面CSに設けられ、マスクMと対向し、マスクMに帯電した静電気を第2ケース部601bに導く。第1ケース部601aと第2ケース部601bとは、第2ケース部601bが第1ケース部601aに装着された状態において、電気的に接続されている。これにより、マスクMに帯電した静電気を、除電ブラシ604によって第2ケース部601bに導き、第2ケース部601bから第1ケース部601aを介して放電索602から放電できる。
In addition, in this embodiment, the
また、本実施形態において、マスクケース600を運搬する運搬台車700は、マスクケース600が載置される載置部701と、載置部701に載置されたマスクケース600に帯電した静電気を除電する除電機構710と、を備える。これにより、マスクケース600を運搬している間(図10のステップS13、図11のステップS39)、マスクケース600に帯電した静電気を除電することができるので、マスクケース600に収納されているマスクMに形成されているパターンが静電気の放電現象によって破壊されてしまうことを抑制することができる。
Furthermore, in this embodiment, the
また、本実施形態において、除電機構710は、マスクケース600の導電性を有する部分(マスクケース支持部611)と電気的に接続する第1電極部品711と、第1電極部品711と電気的に接続され、マスクケース600に帯電した静電気を除電する放電索712と、を備える。これにより、マスクケース600を運搬している間、マスクケース600に帯電した静電気を放電索712によって放電することができる。
In addition, in this embodiment, the
また、本実施形態において、除電機構710は、第1電極部品711と電気的に接続された電極部材713を備え、電極部材713は、運搬台車700が位置決めフレーム311に位置決めされた場合に、位置決めフレーム311に配置され、接地された第2電極部品312と導通する。これにより、運搬台車700が位置決めフレーム311に位置決めされたとき(図10のステップS15)に、マスクケース600に帯電した静電気を地面に逃がすことができる。
In addition, in this embodiment, the
また、本実施形態において、マスクケース600を複数ストック可能なマスクバッファ310は、マスクケース600が載置される棚部320と、棚部320に載置されたマスクケース600に帯電された静電気を除電する除電機構と、を備える。具体的には、棚部320は、マスクケース600の導電性を有する部分(マスクケース支持部611)と接触し、マスクケース600を下方から支持する導電性のケース支持部材320cと、ケース支持部材320cが固定された、導電性のフレーム部320bと、を備える。除電機構は、ケース支持部材320cとフレーム部320bとを電気的に接続し、フレーム部320bを接地することにより、マスクケース600に帯電された静電気を除電する。これにより、マスクケース600をマスクバッファ310に収容している間(図10のステップS17、図11のステップS37)、マスクケース600に帯電した静電気を除電することができるので、マスクケース600に収納されているマスクMに形成されているパターンが静電気の放電現象によって破壊されてしまうことを抑制することができる。
In this embodiment, the
また、本実施形態において、マスクケース600をストックするマスクバッファ310からのマスクケース600の搬出及びマスクバッファ310へのマスクケース600の搬入を行うバッファアーム330は、マスクMの面と平行な方向に駆動して、マスクバッファ310からのマスクケース600の取り出しと、マスクバッファ310へのマスクケース600の挿入とを行うアーム部331と、アーム部331に帯電した静電気を除電する除電機構340と、を備える。アーム部331は、マスクケース600を保持している状態で、マスクケース600と導通する。これにより、バッファアーム330によってマスクケース600を搬送している間(図10のステップS19)、マスクケース600に帯電した静電気を除電することができるので、マスクケース600に収納されているマスクMに形成されているパターンが静電気の放電現象によって破壊されてしまうことを抑制することができる。
In this embodiment, the
また、本実施形態において、アーム部331は、導電性の本体部331aと、本体部331aと電気的に接続され、マスクケース600を支持する台座部331cと、を備える。除電機構340は、本体部331aと電気的に接続され、台座部331cに支持されたマスクケース600の導電性を有する部分(位置決め部612)と接触してマスクケース600に帯電した静電気を本体部331aに導く第3電極部品341を含む。これにより、アーム部331がマスクケース600を支持している間、マスクケース600に帯電した静電気を本体部331aに導くことができる。
In addition, in this embodiment, the
また、本実施形態において、バッファアーム330は、アーム部331をX軸方向に駆動する第1駆動機構333を保持する第1フレーム332と、第1フレーム332をマスクMの面と略直交するY軸方向に駆動する第2駆動機構335を保持する第2フレーム334と、を備える。除電機構340は、アーム部331と対向し、アーム部331(本体部331a)に帯電した静電気を第1フレーム332に導く第1除電ブラシ342と、第1フレーム332と対向し、第1フレーム332に帯電した静電気を第2フレーム334に導く第2除電ブラシ343と、を含み、第2フレーム334は接地されている。これにより、マスクケース600から本体部331aに導かれた静電気を、第1除電ブラシ342、第1フレーム332、第2除電ブラシ343、及び第2フレーム334を介して地面に逃すことができる。
In this embodiment, the
また、本実施形態において、第1除電ブラシ342は、アーム部331がX軸方向において最もマスクバッファ310側に位置しているとき、及びX軸方向において最も第2フレーム334側に位置しているときに、アーム部331に帯電した静電気を第1フレーム332に導く。これにより、マスクケース600をマスクバッファ310から取り出すとき、マスクケース600をマスクバッファ310に戻すときに、マスクケース600に帯電した静電気を除電することができる。
In addition, in this embodiment, the first static
また、本実施形態によれば、本体部100にマスクMを搬送するマスク搬送機構370は、マスクMを保持する保持部371と、保持部371に帯電した静電気を除電する除電機構380と、を備える。これにより、マスクMをマスク搬送機構370により搬送している間(図10のステップS20及びS23、図11のステップS33)、マスクケース600に帯電した静電気を除電することができるので、マスクケース600に収納されているマスクMに形成されているパターンが静電気の放電現象によって破壊されてしまうことを抑制することができる。
Furthermore, according to this embodiment, the
図10および図11に示すマスクMに係る一連の処理において、マスクMがPPD390に搬入されたとき(図10:ステップS21)、マスクMをマスクステージ114に搭載したとき(図10:ステップS25)、マスクMをマスクステージ114から取り外すとき(図11:ステップS31)、及びマスクMをマスクケース600から取り出すとき(図11:ステップS43)には、従来からX線イオナイザ等によって、マスクMに帯電した静電気の除電を行っていたが、それ以外のステップにおいて、マスクMに帯電した静電気を除電する処理は行われていなかった。本実施形態によれば、図10のステップS21、図10のステップS25、図11のステップS31、及び図11のステップS43以外の各ステップにおいて、マスクMに帯電した静電気を除電する対策がなされているため、マスクMに形成されたパターンが静電気の放電現象によって破壊されてしまうことをより抑制することができる。 In the series of processes related to the mask M shown in FIG. 10 and FIG. 11, when the mask M is carried into the PPD 390 (FIG. 10: step S21), when the mask M is mounted on the mask stage 114 (FIG. 10: step S25), when the mask M is removed from the mask stage 114 (FIG. 11: step S31), and when the mask M is taken out of the mask case 600 (FIG. 11: step S43), static electricity charged on the mask M has been conventionally removed using an X-ray ionizer or the like, but no process for removing static electricity charged on the mask M has been performed in other steps. According to this embodiment, measures are taken to remove static electricity charged on the mask M in each step other than step S21 in FIG. 10, step S25 in FIG. 10, step S31 in FIG. 11, and step S43 in FIG. 11, so that the pattern formed on the mask M can be more effectively prevented from being destroyed by the discharge phenomenon of static electricity.
なお、上記実施形態において、除電ブラシ500に代えて、X線イオナイザを設けてもよい。この場合、基板トレイ201の基板Pを保持している面と反対側の面にX線が照射されるように、X線イオナイザを設ければよい。
In the above embodiment, an X-ray ionizer may be provided instead of the static
また、上記実施形態では、第1ケース部601aに導電性のマスク支持部材603を設け、第2ケース部601bに除電ブラシ604を設けていたが、例えば除電ブラシ604を省略してもよい。または、除電ブラシ604を設ける場合、マスク支持部材603を非導電性としてもよい。
In the above embodiment, the
また、上記実施形態において、第1ケース部601aに、第1ケース部601aと電気的に接続され、マスクMに向かって伸びる導電性の毛束を有する除電ブラシを設けてもよい。
In addition, in the above embodiment, the
また、上記実施形態のバッファアーム330において、第3電極部品341は、マスクケース600の位置決め部612と電気的に接続していたが、これに限られるものではない。例えば、台座部331cに第3電極部品341を設け、マスクケース600のマスクケース支持部611と電気的に接続するようにしてもよい。
In addition, in the
また、上記実施形態において、露光装置EXを、マスクMを用いる露光装置として説明したが、基板Pに帯電している静電気を除電する機構については、マスクMに代えて、例えば、空間光変調器によってパターンを形成する、いわゆるマスクレス露光装置においても適用可能である。 In addition, in the above embodiment, the exposure apparatus EX has been described as an exposure apparatus that uses a mask M, but the mechanism for removing static electricity from the substrate P can also be applied to a so-called maskless exposure apparatus that forms a pattern using, for example, a spatial light modulator instead of the mask M.
また、上記実施形態において、一部の除電機構を省略してもよい。 In addition, in the above embodiment, some of the static elimination mechanisms may be omitted.
また、上記実施形態において、接地されている部材に放電索を設け、接地しないようにしてもよい。 In addition, in the above embodiment, a discharge cable may be provided on the grounded member so that it is not grounded.
また、上記実施形態では、露光装置EXが、基板PにマスクMのパターンを転写する露光装置である場合について説明したが、露光装置EXは、例えば、ウエハにレチクルに形成されたパターンを形成する半導体露光装置であってもよい。 In the above embodiment, the exposure apparatus EX is described as an exposure apparatus that transfers the pattern of the mask M onto the substrate P, but the exposure apparatus EX may also be, for example, a semiconductor exposure apparatus that forms a pattern formed on a reticle onto a wafer.
上述した実施形態は本発明の好適な実施の例である。但し、これに限定されるものではなく、本発明の要旨を逸脱しない範囲内において種々変形実施可能である。 The above-described embodiment is a preferred example of the present invention. However, the present invention is not limited to this embodiment, and various modifications are possible without departing from the spirit of the present invention.
以上説明した実施形態に関し、さらに以下の付記を開示する。
[付記1]
露光装置本体にマスクを搬送する搬送装置であって、
前記マスクを保持する保持部と、
前記保持部に帯電した静電気を除電する除電機構と、
を備える、搬送装置。
[付記2]
前記保持部は、前記マスクと接触し、前記マスクを支持する導電性の支持部を備え、
前記除電機構は、前記支持部に帯電した静電気を、接地された他の部材に導くことにより前記保持部に帯電した静電気を除電する、
付記1に記載の搬送装置。
[付記3]
前記保持部は、前記支持部が固定され、前記マスクの面と平行な第1方向に駆動可能なアーム部を備え、
前記除電機構は、
前記支持部と前記アーム部とを電気的に接続し、前記支持部に帯電した静電気を前記アーム部に導く接続部と、
前記アーム部に帯電した静電気を、前記アーム部を収容し、接地された筐体に導く第6除電部材と、
を含む、付記2に記載の搬送装置。
[付記4]
前記接続部は、弾性を有する板状部材である、
付記3記載の搬送装置。
[付記5]
前記第6除電部材は、前記保持部が前記マスクを保持しているときに、前記アーム部に帯電した静電気を前記筐体に導く、
付記3または付記4に記載の搬送装置。
[付記6]
前記第6除電部材は、導電性の毛束を有する除電ブラシである、
付記3から付記5のいずれか1つに記載の搬送装置。
The following supplementary notes are further disclosed regarding the above-described embodiment.
[Appendix 1]
A transport device that transports a mask to an exposure apparatus body,
A holder for holding the mask;
a static elimination mechanism that eliminates static electricity charged to the holding portion;
A conveying device comprising:
[Appendix 2]
the holding portion includes a conductive support portion that contacts the mask and supports the mask,
The static electricity removal mechanism removes static electricity from the holding portion by guiding the static electricity from the supporting portion to another grounded member.
2. The conveying device of claim 1.
[Appendix 3]
the holding unit includes an arm unit to which the support unit is fixed and which is movable in a first direction parallel to a surface of the mask,
The static elimination mechanism includes:
a connection portion that electrically connects the support portion and the arm portion and guides static electricity charged on the support portion to the arm portion;
a sixth static elimination member that guides static electricity charged on the arm portion to a grounded housing that houses the arm portion;
3. The conveying device of claim 2, comprising:
[Appendix 4]
The connection portion is an elastic plate-like member.
4. The conveying apparatus of claim 3.
[Appendix 5]
the sixth charge removing member guides static electricity charged in the arm portion to the housing when the holding portion holds the mask.
5. The conveying device according to claim 3 or 4.
[Appendix 6]
The sixth charge removing member is a charge removing brush having a conductive bristle bundle.
6. A conveying device according to any one of claims 3 to 5.
100 本体部
114 マスクステージ
310 マスクバッファ
312 第2電極部品
320 棚部
320a 支持部
320b フレーム部
330 バッファアーム
331 アーム部
331a 本体部
331c 台座部
332 第1フレーム
333 第1駆動機構
334 第2フレーム
335 第2駆動機構
340 除電機構
341 第3電極部品
600 マスクケース
601 ケース本体
601a 第1ケース部
601b 第2ケース部
602 放電索
603 マスク支持部材
604 除電ブラシ
605a~605e 電極部材
700 運搬台車
701 載置部
710 除電機構
711 第1電極部品
712 放電索
713 電極部材
BS 底面
CS 天井面
EX 露光装置
100
Claims (22)
前記マスクに帯電した静電気を前記ケース本体の前記導電性を有する部分に導く導電性部材と、
前記導電性を有する部分と電気的に接続され、前記導電性を有する部分に帯電した静電気を除電する第1除電部材と、
を備えるマスクケース。 A case body having at least a portion thereof electrically conductive and housing the mask;
a conductive member for guiding the static electricity charged on the mask to the conductive portion of the case body;
a first static elimination member electrically connected to the conductive portion and configured to eliminate static electricity charged on the conductive portion;
A mask case equipped with:
請求項1に記載のマスクケース。 The first charge removing member is a discharge cord.
The mask case according to claim 1.
底面を有する第1ケース部と、
前記第1ケース部に対して着脱可能に設けられ、前記底面に対向配置される天井面を有する第2ケース部と、
を含み、
前記第1ケース部と前記第2ケース部との少なくとも一方は、前記導電性を有する部分を有する、
請求項1または請求項2に記載のマスクケース。 The case body includes:
a first case portion having a bottom surface;
a second case portion that is detachably provided with respect to the first case portion and has a ceiling surface that faces the bottom surface;
Including,
At least one of the first case portion and the second case portion has the conductive portion.
The mask case according to claim 1 or 2.
前記導電性部材は、前記マスクと対向するよう前記底面に設けられ、前記マスクに帯電した静電気を前記第1ケース部に導く第1導電性部材を含み、
前記第1除電部材は、前記第1ケース部の外側に設けられ、前記第1ケース部に帯電した静電気を除電する、
請求項3に記載のマスクケース。 the first case portion is conductive,
the conductive member includes a first conductive member provided on the bottom surface to face the mask and configured to guide static electricity charged on the mask to the first case portion;
The first charge removing member is provided outside the first case portion and removes static electricity charged to the first case portion.
The mask case according to claim 3.
請求項4に記載のマスクケース。 the first conductive member is electrically connected to the first case portion and includes a plurality of conductive support members that contact the mask and support the mask.
The mask case according to claim 4.
前記第1ケース部と、前記第1除電部材と、を電気的に接続する第2電極部材 と、
を備える請求項5に記載のマスクケース。 a first electrode member electrically connecting the plurality of conductive support members and the first case portion;
a second electrode member electrically connecting the first case portion and the first charge removing member;
The mask case according to claim 5 .
請求項4から請求項6のいずれか一項に記載のマスクケース。 The first conductive member is electrically connected to the first case portion and includes a static elimination brush having a conductive bristle bundle extending toward the mask.
The mask case according to any one of claims 4 to 6.
前記導電性部材は、前記第2ケース部の前記天井面に設けられ、前記マスクと対向し、前記マスクに帯電した静電気を前記第2ケース部に導く第2導電性部材を含み、
前記第1ケース部と前記第2ケース部とは、前記第2ケース部が前記第1ケース部に装着された状態において、電気的に接続されている、
請求項4から請求項8のいずれか一項に記載のマスクケース。 the second case portion is conductive,
the conductive member includes a second conductive member that is provided on the ceiling surface of the second case portion, faces the mask, and guides static electricity charged on the mask to the second case portion;
The first case portion and the second case portion are electrically connected to each other in a state in which the second case portion is attached to the first case portion.
The mask case according to any one of claims 4 to 8.
前記第1ケース部と、前記第2ケース部と、を電気的に接続する第5電極部材と、
を備える請求項9に記載のマスクケース。 a fourth electrode member electrically connecting the second case portion and the second conductive member;
a fifth electrode member that electrically connects the first case portion and the second case portion;
The mask case according to claim 9 .
請求項9または請求項10に記載のマスクケース。 The second conductive member is a static elimination brush having a conductive bristle bundle extending toward the first case portion.
The mask case according to claim 9 or 10.
前記マスクケースが載置される載置部と、
前記載置部に載置された前記マスクケースに帯電した静電気を除電する除電機構と、
を備える運搬台車。 A transport cart for transporting the mask case according to any one of claims 1 to 11,
A placement portion on which the mask case is placed;
a static elimination mechanism that eliminates static electricity charged on the mask case placed on the placement section;
A transport cart equipped with the above.
前記マスクケースの前記導電性を有する部分と電気的に接続する第1電極部品と、
前記第1電極部品と電気的に接続され、前記マスクケースに帯電した静電気を除電する第3除電部材と、
を備える請求項12に記載の運搬台車。 The static elimination mechanism includes:
a first electrode part electrically connected to the conductive portion of the mask case;
a third charge removing member electrically connected to the first electrode part and configured to remove static electricity charged on the mask case;
13. The transport dolly of claim 12, comprising:
前記第5電極部材は、前記運搬台車が所定の場所に位置決めされた場合に、前記所定の場所に配置され、接地された第2電極部品と導通する、
請求項13に記載の運搬台車。 the static elimination mechanism includes a fifth electrode member electrically connected to the first electrode component,
When the transport cart is positioned at a predetermined location, the fifth electrode member is disposed at the predetermined location and is electrically connected to a grounded second electrode component.
14. A transport dolly according to claim 13.
前記マスクケースが載置される棚部と、
前記棚部に載置された前記マスクケースに帯電された静電気を除電する除電機構と、
を備えるマスクバッファ。 A mask buffer capable of storing a plurality of mask cases according to any one of claims 1 to 11,
A shelf portion on which the mask case is placed;
a static elimination mechanism that eliminates static electricity charged on the mask case placed on the shelf;
A mask buffer comprising:
前記マスクケースの前記導電性を有する部分と接触し、前記マスクケースを下方から支持する導電性のケース支持部と、
前記ケース支持部が固定された導電性のフレーム部と、
を備え、
前記除電機構は、前記ケース支持部と前記フレーム部とを電気的に接続し、前記フレーム部を接地することにより、前記マスクケースに帯電された静電気を除電する、
請求項15に記載のマスクバッファ。 The shelf portion is
a conductive case support part that contacts the conductive part of the mask case and supports the mask case from below;
a conductive frame portion to which the case support portion is fixed;
Equipped with
the static elimination mechanism electrically connects the case support portion and the frame portion and grounds the frame portion to eliminate static electricity charged on the mask case.
16. The mask buffer of claim 15.
前記マスクの面と平行な第1方向に駆動して、前記マスクバッファからの前記マスクケースの取り出しと、前記マスクバッファへの前記マスクケースの挿入とを行うアーム部と、
前記アーム部に帯電した静電気を除電する除電機構と、
を備え、
前記アーム部は、前記マスクケースを保持している状態で、前記マスクケースと導通する、
搬送装置。 12. A conveying device that carries out a mask case from a mask buffer that stocks the mask case according to any one of claims 1 to 11 and carries the mask case into the mask buffer,
an arm portion that is driven in a first direction parallel to a surface of the mask to remove the mask case from the mask buffer and insert the mask case into the mask buffer;
a static elimination mechanism that eliminates static electricity charged to the arm portion;
Equipped with
The arm portion is electrically connected to the mask case while holding the mask case.
Conveying device.
導電性の本体部と、
前記マスクケースを支持する支持部材と、
を備え、
前記除電機構は、前記本体部と電気的に接続され、前記支持部材に支持された前記マスクケースの前記導電性を有する部分と接触して前記マスクケースに帯電した静電気を前記本体部に導く第3電極部品を含む、
請求項17に記載の搬送装置。 The arm portion is
A conductive body portion;
A support member for supporting the mask case;
Equipped with
The static elimination mechanism includes a third electrode part that is electrically connected to the main body and contacts the conductive portion of the mask case supported by the support member to guide static electricity charged on the mask case to the main body part.
20. The transport device of claim 17.
前記第1フレームを前記マスクの面と略直交する第2方向に駆動する第2駆動機構を保持する第2フレームと、
を備え、
前記除電機構は、
前記アーム部と対向し、前記アーム部に帯電した静電気を前記第1フレームに導く第4除電部材と、
前記第1フレームと対向し、前記第1フレームに帯電した静電気を前記第2フレームに導く第5除電部材と、
を含み、
前記第2フレームは接地されている、
請求項17または請求項18に記載の搬送装置。 a first frame that holds a first drive mechanism that drives the arm portion in the first direction;
a second frame holding a second drive mechanism that drives the first frame in a second direction substantially perpendicular to a surface of the mask;
Equipped with
The static elimination mechanism includes:
a fourth static elimination member that faces the arm portion and guides static electricity charged on the arm portion to the first frame;
a fifth static elimination member that faces the first frame and guides static electricity charged on the first frame to the second frame;
Including,
The second frame is grounded.
A conveying device according to claim 17 or 18.
請求項19に記載の搬送装置。 the fourth charge removing member guides static electricity charged in the arm portion to the first frame when the arm portion is positioned closest to the mask buffer in the first direction and when the arm portion is positioned closest to the second frame in the first direction.
20. The transport device of claim 19.
請求項19または請求項20に記載の搬送装置。 the fifth charge removing member guides static electricity charged on the first frame to the second frame at at least one of a timing when the first frame is at the highest position and a timing when the first frame is at the lowest position in the second direction;
A conveying device according to claim 19 or 20.
請求項19から請求項21のいずれか一項に記載の搬送装置。 The fourth charge eliminating member and the fifth charge eliminating member are charge eliminating brushes having conductive bristles.
A conveying device according to any one of claims 19 to 21.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2023/035210 WO2025069264A1 (en) | 2023-09-27 | 2023-09-27 | Mask case, transport carriage, mask buffer, and conveyance device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2023/035210 WO2025069264A1 (en) | 2023-09-27 | 2023-09-27 | Mask case, transport carriage, mask buffer, and conveyance device |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2025069264A1 true WO2025069264A1 (en) | 2025-04-03 |
Family
ID=95202419
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2023/035210 Pending WO2025069264A1 (en) | 2023-09-27 | 2023-09-27 | Mask case, transport carriage, mask buffer, and conveyance device |
Country Status (1)
| Country | Link |
|---|---|
| WO (1) | WO2025069264A1 (en) |
Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH01174281U (en) * | 1988-05-31 | 1989-12-11 | ||
| JPH069098U (en) * | 1992-07-09 | 1994-02-04 | 神鋼電機株式会社 | Charging electrostatic discharge device for carrier |
| JPH10163094A (en) * | 1996-12-03 | 1998-06-19 | Nikon Corp | Exposure apparatus, exposure method, and transport apparatus |
| JP2002158277A (en) * | 2000-11-21 | 2002-05-31 | Nikon Corp | Substrate holder, substrate transfer arm, exposure apparatus and substrate exposure processing apparatus |
| JP2004117635A (en) * | 2002-09-25 | 2004-04-15 | Toppan Printing Co Ltd | Mask case |
| JP2006084506A (en) * | 2004-09-14 | 2006-03-30 | Matsushita Electric Ind Co Ltd | Photomask storage device and storage method thereof |
| US7604306B1 (en) * | 2001-08-23 | 2009-10-20 | Taiwan Semiconductor Manufacturing Company | Reticle box transport cart |
| JP2011060490A (en) * | 2009-09-08 | 2011-03-24 | Mitsubishi Electric Corp | Antistatic electric apparatus conveying system |
| JP3229634U (en) * | 2020-04-06 | 2020-12-17 | 合同会社Mrc | Mask case |
-
2023
- 2023-09-27 WO PCT/JP2023/035210 patent/WO2025069264A1/en active Pending
Patent Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH01174281U (en) * | 1988-05-31 | 1989-12-11 | ||
| JPH069098U (en) * | 1992-07-09 | 1994-02-04 | 神鋼電機株式会社 | Charging electrostatic discharge device for carrier |
| JPH10163094A (en) * | 1996-12-03 | 1998-06-19 | Nikon Corp | Exposure apparatus, exposure method, and transport apparatus |
| JP2002158277A (en) * | 2000-11-21 | 2002-05-31 | Nikon Corp | Substrate holder, substrate transfer arm, exposure apparatus and substrate exposure processing apparatus |
| US7604306B1 (en) * | 2001-08-23 | 2009-10-20 | Taiwan Semiconductor Manufacturing Company | Reticle box transport cart |
| JP2004117635A (en) * | 2002-09-25 | 2004-04-15 | Toppan Printing Co Ltd | Mask case |
| JP2006084506A (en) * | 2004-09-14 | 2006-03-30 | Matsushita Electric Ind Co Ltd | Photomask storage device and storage method thereof |
| JP2011060490A (en) * | 2009-09-08 | 2011-03-24 | Mitsubishi Electric Corp | Antistatic electric apparatus conveying system |
| JP3229634U (en) * | 2020-04-06 | 2020-12-17 | 合同会社Mrc | Mask case |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US6496257B1 (en) | Projection exposure apparatus and method | |
| KR101496076B1 (en) | Substrate transfer apparatus, substrate transfer method and exposure apparatus | |
| KR100645272B1 (en) | Positioning device for exposure apparatus and substrate storage cassette | |
| KR100530676B1 (en) | Projection Exposure Method | |
| JPH11162831A (en) | Projection exposure apparatus and projection exposure method | |
| TW201218248A (en) | Exposure device and device manufacturing method | |
| US20110069288A1 (en) | Reticle Transport Apparatus, Exposure Apparatus, Reticle Transport Method, and Reticle Processing Method | |
| WO2004109780A1 (en) | Stage apparatus, fixation method, exposure apparatus, exposure method, and device-producing method | |
| JPWO2008007521A1 (en) | Reticle holding member, reticle stage, exposure apparatus, projection exposure method, and device manufacturing method | |
| US20020074635A1 (en) | Exposure apparatus, holder container, device manufacturing method, and device manufacturing unit | |
| JP2002353096A (en) | Substrate transport method, exposure apparatus and exposure method | |
| JP3276477B2 (en) | Substrate processing equipment | |
| WO2025069264A1 (en) | Mask case, transport carriage, mask buffer, and conveyance device | |
| WO2025069248A1 (en) | Exposure apparatus and substrate support member | |
| JP4978471B2 (en) | Object loading / unloading method and loading / unloading apparatus, exposure method and exposure apparatus, and device manufacturing method | |
| TWI913889B (en) | Exposure apparatus and substrate support structure | |
| JP2001100169A (en) | Substrate support device and substrate processing device | |
| JP2001159613A (en) | Foreign matter inspection apparatus and exposure apparatus having the same | |
| KR100696735B1 (en) | Lithographic Apparatus and Device Manufacturing Method | |
| US20040057031A1 (en) | Exposure apparatus and method of manufacturing a semiconductor device using the same | |
| KR20260056241A (en) | Exposure device and substrate support member | |
| TW202508781A (en) | Handling system for microlithographic photomasks, inspection system and processing system having a handling system | |
| JP2000294500A (en) | Peripheral exposure apparatus and method | |
| JP2000340642A (en) | Substrate storage case and exposure apparatus using the same | |
| JP3551423B2 (en) | Exposure equipment |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 23954240 Country of ref document: EP Kind code of ref document: A1 |