CN102473663A - 用环形照射的暗场检查系统 - Google Patents
用环形照射的暗场检查系统 Download PDFInfo
- Publication number
- CN102473663A CN102473663A CN2010800337829A CN201080033782A CN102473663A CN 102473663 A CN102473663 A CN 102473663A CN 2010800337829 A CN2010800337829 A CN 2010800337829A CN 201080033782 A CN201080033782 A CN 201080033782A CN 102473663 A CN102473663 A CN 102473663A
- Authority
- CN
- China
- Prior art keywords
- dialogues
- told
- play
- details
- stage
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images










Classifications
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10P—GENERIC PROCESSES OR APPARATUS FOR THE MANUFACTURE OR TREATMENT OF DEVICES COVERED BY CLASS H10
- H10P74/00—Testing or measuring during manufacture or treatment of wafers, substrates or devices
- H10P74/20—Testing or measuring during manufacture or treatment of wafers, substrates or devices characterised by the properties tested or measured, e.g. structural or electrical properties
- H10P74/203—Structural properties, e.g. testing or measuring thicknesses, line widths, warpage, bond strengths or physical defects
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N21/00—Investigating or analysing materials by the use of optical means, i.e. using sub-millimetre waves, infrared, visible or ultraviolet light
- G01N21/84—Systems specially adapted for particular applications
- G01N21/88—Investigating the presence of flaws or contamination
- G01N21/95—Investigating the presence of flaws or contamination characterised by the material or shape of the object to be examined
- G01N21/9501—Semiconductor wafers
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N21/00—Investigating or analysing materials by the use of optical means, i.e. using sub-millimetre waves, infrared, visible or ultraviolet light
- G01N21/84—Systems specially adapted for particular applications
- G01N21/88—Investigating the presence of flaws or contamination
- G01N21/8806—Specially adapted optical and illumination features
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N21/00—Investigating or analysing materials by the use of optical means, i.e. using sub-millimetre waves, infrared, visible or ultraviolet light
- G01N21/84—Systems specially adapted for particular applications
- G01N21/88—Investigating the presence of flaws or contamination
- G01N21/8806—Specially adapted optical and illumination features
- G01N2021/8822—Dark field detection
Landscapes
- Physics & Mathematics (AREA)
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Chemical & Material Sciences (AREA)
- Analytical Chemistry (AREA)
- Biochemistry (AREA)
- General Health & Medical Sciences (AREA)
- General Physics & Mathematics (AREA)
- Immunology (AREA)
- Pathology (AREA)
- Investigating Materials By The Use Of Optical Means Adapted For Particular Applications (AREA)
- Testing Or Measuring Of Semiconductors Or The Like (AREA)
- Length Measuring Devices By Optical Means (AREA)
Abstract
使归因于样本表面粗糙度的斑点噪声最小化的暗场检查系统可包括用于在晶片上生成合成的、聚焦照射线的多个光束成形路径。每一光束成形路径可以斜角照射晶片。多个光束成形路径可形成环形照射。该环形照射可降低斑点效应,由此改进SNR。物镜可捕捉来自晶片的散射光,并且成像传感器可接收物镜的输出。由于晶片照射以斜角进行,因此物镜可具有高NA,由此改进成像传感器的光分辨率和所得信号电平。
Description
赵国衡
M·瓦埃兹-伊拉瓦尼
S·扬
K·巴斯卡尔
相关申请
本申请要求2009年7月22日提交的题为“具有增强能力的缺陷检查系统(Defect Inspection System With Enhanced Capabilities)”的美国临时专利申请61/227,713的优先权。
发明背景
发明领域
本发明涉及暗场检查系统,更具体地涉及形成用于该检查系统的环形照射。
相关技术
半导体晶片上的表面最佳是平的。然而,即使对于空白晶片,一些残余粗糙度不可避免地存在。可能只是2nm或更小(即远小于用于检查的光的波长)的该粗糙度仍然可在暗场检查系统中的成像传感器处的所检测的散射光中产生不合需要的波动。这些波动可表征为噪声基底(floor),并且在本文中被引用为“斑点”。对于晶片检查,斑点实际上是成像传感器的灵敏度的限制因素。即,否则可能被检测到的小粒子(例如,缺陷)可被斑点搅乱(obfuscate)。
暗场晶片检查的常规方法还未被设计成克服斑点,包括宽带系统或激光暗场检查系统的边缘对比(EC)模式。不幸的是,宽带系统的EC模式使用低亮度宽带光源,这在成像传感器处产生较低的照射水平。此外,由于数值孔径(NA)用于照射和成像两者,因此宽带系统的EC模式具有可用于缺陷检测的固有受限的NA。该受限的NA可产生低的光分辨率,以及用于散射光的相对较低的收集效率。
诸如克拉-坦科股份有限公司公司(KLA-Tencor)所供应的普码系列(Pumafamily)产品之类的典型激光暗场检查系统使用斜光入射,该斜光入射创建可有些限制分辨率的相对较大的线宽度(例如,大约1um)。此外,典型激光暗场检查系统使用单个照射角,这产生强的空间相干性。强的空间相干性可产生相对较大水平的粗糙度感生的波动(或斑点),这可影响该系统对真实缺陷的最终灵敏度。
因此,出现了对可显著地改进缺陷检测灵敏度的暗场检查系统的需求。
发明概述
晶片的表面粗糙度通常在暗场检查系统中的成像传感器处的所检测的散射光中产生小的波动。被称为斑点的这些波动可表征为噪声基底。对于晶片检查,否则可能被检测到的小缺陷(例如,粒子)可被斑点搅乱。
最小化斑点效应的暗场检查系统可包括用于在晶片上生成合成的、聚焦照射线或二维场的多个光束成形路径。每一光束成形路径可有利地以斜角照射晶片。多个光束成形路径可形成环形照射。该环形照射可降低斑点效应,由此改进SNR(信噪比)。检查系统还可包括用于捕捉来自晶片的散射光的物镜,以及用于接收物镜的输出的成像传感器。由于晶片照射以斜角进行,因此物镜可具有高的NA(数值孔径)(例如,至少0.5),由此改进光分辨率。在一个实施例中,斜角相对于表面法线可在60-85度之间。
在一个实施例中,光束成形路径中的每一个可包括光源(例如,激光器或激光二极管)以及圆柱形透镜。每一圆柱形透镜可相对于来自其相应光源的光束倾斜和旋转。每一圆柱形透镜可具有与照射线平行放置的圆柱轴。在一个实施例中,每一圆柱形透镜可绕其圆柱轴旋转以使像差最小化。
在一个实施例中,至少一个光束成形路径包括第一、第二和第三圆柱形透镜。第一和第二圆柱形透镜之一在任何时间点都位于光束成形路径。第一和第二圆柱形透镜中的每一个可确定照射线的长度。第三圆柱形透镜可确定照射线的宽度。在另一个实例中,第一和第二圆柱形透镜可被缩放透镜替代,该缩放透镜允许在预定范围内选择特定照射线长度。
在一个实施例中,暗场检查系统的成像传感器可包括与晶片上的粒子的图像的形状相匹配的数字图像处理滤波器。例如,该形状可以是环状。
在一个实施例中,多个光束成形路径可包括多个激光器以及耦合到多个激光器的多模光纤。调制器可调制多模光纤所携带的光束。镜子可被放置成用于反射和引导用于生成照射线的光束。在一个实施例中,镜子可包括非球面环形镜子。
在另一实施例中,多个光束成形路径可包括宽带光源以及用于接收宽带光源的输出的光管。聚光透镜可准直光管的输出。镜子可被放置成用于反射和引导从聚光透镜输出的、用于生成照射线的光束。在一个实施例中,镜子可包括非球面环形镜子。
在每一光束成形路径包括光源的一个实施例中,至少一个光源包括用于生成具有多个波长的激光束的多个激光器和二向色(dichroic)光束组合器。由于不同的缺陷可对不同的波长作出不同的响应,因此这些多个波长可便于缺陷检测和标识。在每一光束成形路径包括光源的另一实施例中,每一光源可以是激光器,并且相邻光束成形路径具有不同波长的激光器。
在一个实施例中,多个光束成形路径可包括激光器以及耦合到该激光器的漫射器。光纤束可接收漫射器的输出。光纤束的每一光纤可贡献光以形成照射线。
在一个实施例中,暗场检查系统可包括被放置成接收物镜的输出的分束器。在此情况下,成像传感器可包括多个成像传感器,每一成像传感器用于检测分束器所输出的光的特定波长。例如,成像传感器可包括用于检测分束器所输出的光的第一波长的第一成像传感器以及用于检测分束器所输出的光的第二波长的第二成像传感器。在具有分束器所输出的三个或更多个波长的一个实施例中,可只选择多个成像传感器的子集以供图像分析。
还描述了一种配置暗场检查系统的方法。在该方法中,形成光束成形路径以提供环形照射。每一光束成形路径用于以斜角照射晶片。值得注意的是,多个光束成形路径的输出可在晶片上形成聚焦照射线。
附图简述
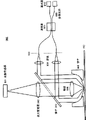
图1A示出包括多个光束成形路径的示例性照射环,每一光束成形路径包括光源以及相应的照射光学器件。
图1B示出图1A的照射环可以斜角照射晶片。
图2示出可使用多个TDI级在扫描方向上扫描的填充过多的(over-filled)照射区域。
图3示出可使用与图2所示的配置相比实质上缩减数量的TDI级来扫描的填充不足的(under-field)照射区域。
图4示出包括相对于其光束倾斜和旋转以在晶片上形成合成的照射场的三个圆柱形透镜的示例性照射配置。
图5和6示出可如何基于方位角和极角来确定用于照射场生成的圆柱形透镜的取向。
图7示出包括用于提供多个照射场长度的三个圆柱形透镜的示例性光束成形路径。
图8示出包括背景斑点和呈现环形图像的四个粒子的未经图案化的晶片表面的成像传感器输出表示。
图9示出可调制(例如,摇动)来自多个激光器的并经由多模光纤递送的激光束以增加平均效应的示例性检查系统。
图10示出可准直宽带光源所生成的光以将其更有效地递送到最终照射镜子的示例性检查系统。
图11示出组合不同波长的激光束以增加平均效应并改进缺陷标识。
图12示出使用以不同极角交错的不同波长的激光束以增加平均效应并改进缺陷标识。
图13示出包括多个检测通道的示例性检查系统1300。
图14示出其中漫射器可接收来自激光器的相干光并生成不相干光的示例性检查系统。
附图的详细描述
晶片表面的粗糙度可在暗场检查系统中的成像传感器处的所检测的散射光中产生不合需要的波动。对于晶片检查,该波动(在本文中称为斑点)实际上是成像传感器的灵敏度的限制因素。根据经改进的暗场检查系统的一方面,可使用环形照射减少斑点,这可有利地降低空间相干性,并且由此改进光灵敏度。
图1A示出包括多个光束成形路径101的示例性照射环100。每一光束成形路径102可包括光源102以及相应的照射光学器件103。在一个实施例中,光源102可以是激光器或激光二极管。值得注意的是,还参考图1B,光源102(经由照射光学器件103)可以斜角照射晶片104。在一个实施例中,斜照射角(如从晶片法线所测量的)可以是从60到85度。这些斜照射角可释放物镜111只用于成像,由此允许使用高的NA(例如,从0.5到0.97)。成像传感器110可被放置成使用标准成像路径配置(为了简便起见未示出)来接收来自物镜111的聚焦光的样本/缺陷散射分量。
值得注意的是,当对两个独立的、随机噪声源求平均时,总随机噪声减少 对于对N个独立的、随机噪声源求平均,总随机噪声减少
对于对N个独立的、随机噪声源求平均,总随机噪声减少 以上所描述的环形照射可提供统计上独立的噪声源(即斑点),由此在增强粒子信号的同时有效地抵消一些噪声源,如在下文中所详细描述的。该抵消过程此处还被称为“求平均”。注意,N可以是偶数或奇数。
以上所描述的环形照射可提供统计上独立的噪声源(即斑点),由此在增强粒子信号的同时有效地抵消一些噪声源,如在下文中所详细描述的。该抵消过程此处还被称为“求平均”。注意,N可以是偶数或奇数。
通过使用以上所描述的照射配置,晶片104甚至可由宽带晶片检查工具使用延时积分(TDI)来检查。在2007年6月5日公告的授予克拉-坦科股份有限公司的题为“用于通过使用抖动来重构下采样图像以标识基板表面中的缺陷的方法以及装置(Method And Apparatus For Identifying Defects In A SubstrateSurface By Using Dithering To Reconstruct Under-Sampled Images)”的美国专利7227984中描述了各种TDI技术和配置,并且其通过引用结合于此。注意,在宽带工具中,通常可能需要具有大量积分级的TDI来改进光预算。例如,图2示出可使用TDI级202在扫描方向203上扫描的填充过多的照射区域203(通常在宽带工具中)。然而,配置有TDI级202以基本上覆盖填充过多的照射区域201的TDI传感器可能是昂贵的,并且因与大的传感器区域相关联的较低产量而难以生产。
值得注意的是,光源102以及其相应的照射光学器件103可在晶片104上生成薄的、亮的照射线(例如,约10um),由此显著地增加每单位面积的光强度(与宽带光源相比)。为了使TDI级最小化,可形成与TDI积分方向垂直的照射线。例如,图3示出可使用基本上缩减数量的TDI级302在扫描方向303上扫描的填充不足的照射区域303(即晶片上的照射线)。术语“填充不足”是指与“填充过多的”照射区域相比(参见例如图2)提供用于照射的显著较小的区域。该TDI级的减少可显著地降低与传感器相关的成本,同时提供高灵敏度和高吞吐量检查所需的足够的照射亮度。在一个实施例中,为了优化晶片检查的吞吐量,照射线的长度可在1-3mm的范围内。
在一个实施例中,对于多个方位照射角,可至少部分地叠加来自不同的照射角的照射线以形成照射线,即填充不足的照射区域301。在另一实施例中,可有效地级联来自不同的照射角的照射线以形成照射线。
图4示出包括相对于其光束倾斜和旋转以在晶片上形成合成的照射线的三个圆柱形透镜的示例性照射配置。具体地,三个圆柱形透镜411、412和413(其可能构成来自三个光束成形路径的照射光学器件的一部分)可分别相对于激光束401、402和403(其可能由其相应的光源输出,为了简便起见未示出)倾斜和旋转以在晶片410上形成照射线。在一个实施例中,可根据照射角确定倾斜和旋转角。
图4示出用于圆柱形透镜411、412和413的分别为0、45和90度方位角的示例性角。注意,每一圆柱形透镜接收来自其相关联的激光束的准直光,并且在晶片410上生成与其长轴平行的聚焦线,该长轴被称为a轴。
取决于照射的方位角,圆柱形透镜可具有不同的取向。例如,图5示出可如何基于方位角Φ和极角θ来确定用于照射线生成的圆柱形透镜501的取向。a轴被称为圆柱轴,其中c轴被称为圆柱形透镜的光轴。b轴垂直于a轴和c轴两者。如果照射线沿着x轴,则圆柱形透镜501的a轴与x轴平行。在一个实施例中,圆柱形透镜501的b轴可与入射光束垂直放置以使像差最小化。
由于不管照射的入射角如何圆柱形透镜501的a轴都与x轴平行,因此圆柱形透镜501的取向可由相对于a轴的旋转角方便地定义。以下等式导出用于圆柱形透镜的取向,其作为方位角Φ和极角θ的函数。
照射光束矢量可由以下等式表示:
圆柱形透镜的轴矢量
b的方向可如下地计算:
其中δ是圆柱形透镜 和入射光束
和入射光束 之间的角,并且由以下等式给出:
之间的角,并且由以下等式给出:
因此,
注意,一个特定情况是当Φ=0°时:
其中 与y轴平行。即,光轴与z轴平行。圆柱形透镜和入射光束之间的角为90°-θ,这是用于激光暗场检查工具的照射排列的情况。
与y轴平行。即,光轴与z轴平行。圆柱形透镜和入射光束之间的角为90°-θ,这是用于激光暗场检查工具的照射排列的情况。
另一特定情况是当Φ=90°时:
其中圆柱形透镜与入射光束(δ=0)垂直,这是用于聚焦激光束的圆柱形透镜的常规用途。
出于以任意照射角对准用于聚焦激光束的圆柱形透镜的目的,可使用以下两个步骤:
步骤1)对准圆柱轴a以与线方向(该示例中的x轴)平行,并且光轴 与z轴平行;以及
与z轴平行;以及
步骤2)围绕其圆柱轴 使圆柱形透镜旋转角度ω,其由以下等式给出:
使圆柱形透镜旋转角度ω,其由以下等式给出:
因此,
圆柱形透镜的旋转使得圆柱形透镜的 轴与入射光束601垂直,如图6所示。
轴与入射光束601垂直,如图6所示。
注意,步骤2)可使像差最小化。因此,如果照射线不需要紧密地聚焦,则步骤2可能不是必要的。
表格1在以下列出针对偏离以65度极入射角照射的各个方位角的透镜旋转角(以度为单位)的示例。
表格1
| Φ | ω | δ |
| 0 | 00.00 | 25.00 |
| 15 | 29.03 | 28.90 |
| 30 | 47.00 | 38.29 |
| 45 | 56.60 | 50.14 |
| 60 | 61.70 | 63.05 |
| 75 | 64.23 | 76.43 |
| 90 | 65.00 | 90.00 |
图7示出包括用于提供多个照射线长度的三个圆柱形透镜的示例性光束成形路径700。在该实施例中,光束成形路径700可包括可由散热片701冷却的激光二极管702。在一个实施例中,散热片701可使用热电(TE)冷却器来实现,并且激光二极管702可由9mm二极管来实现。激光二极管702所发射的光可由球面准直透镜703准直,并且通过孔704成形。偏振的取向由波板705控制。此时,光可通过圆柱形透镜706、707和708中的至少两个以形成线709。在该实施例中,圆柱形透镜706和707可用于确定线长度,而圆柱形透镜708可用于聚焦该线(即确定其宽度)。在实际实现中,电动机(未示出)可用于交换和移动圆柱形透镜707,由此向用户提供用于吞吐量和灵敏度调整的可选线长度。在另一实现中,圆柱形透镜706和707可被连续缩放透镜710替代,连续缩放透镜710允许在预定范围内选择特定照射线长度。注意,以上所描述的倾斜和旋转只指圆柱形透镜708。
在一个实施例中,每一光源(参见例如图1A)具有一个相应的光束成形路径700。在其他实施例(在下文中所描述的)中,单个光源可生成光束,该光束随后被分成多个光源。注意,增加用于多个光源的极角的数量可有利地增加信噪比(SNR)(即,使斑点最小化),具体而言2个角以上。
值得注意的是,在特定极角、晶片表面的粗糙度和斑点减少之间存在对应关系。例如,针对裸晶片的相对平滑的晶片表面,光源的0和180度角提供的斑点减少比0和90度角提供的斑点减少小。然而,针对经图案化的晶片的相对粗糙的晶片表面,可使用90度或180度(和0度),其具有相当的结果。由此,对经图案化的晶片求平均比对具有相同数量的光源的未经图案化的晶片求平均可能更有效。注意,由于以较小角距的照射生成斑点图案之间的增大的相关性(其中,在任何情况下将8个以上的光源围绕晶片物理地放置可造成挑战),因此在8个角之后可发生较小的SNR改进,而不管晶片表面粗糙度如何。
注意,裸晶片上的粒子检测灵敏度受晶片表面粗糙度的斑点噪声限制。对于远小于激光长度的粒子尺寸,针对倾斜P偏振(与入射的平面平行)照射的散射电场的远场对于任何特定散射方向主要为P偏振,并且强度分布具有环状。当粒子用高的NA物镜成像时,偏振主要在物镜的傅立叶平面的径向上。矢量成像模拟指示这些条件下的粒子的暗场图像不是Jinc(金克)函数,该Jinc函数是标量成像理论所预测的成像透镜的点扩散函数。值得注意的是,添加到所捕捉图像P-y(在y方向上偏振)的所捕捉图像P-x(在x方向上偏振)等于所捕捉图像U,即未偏振的图像。因此,在一个实施例中,可捕捉未偏振的图像。
所捕捉的粒子的图像示出具有稍微不对称加权的环状的暗中心。图8示出包括背景斑点801和呈现环状的四个粒子802的裸晶片表面800的成像传感器输出表示。值得注意的是,针对以方位角(但与以极角相类似地)等距间隔开的多个照射角,P偏振的小粒子的图像变成接近完美的环状。如图8所示,粒子802的独特标记图可与斑点噪声801清楚地区分开,由此便于缺陷标识。
在一个实施例中,可在数字图像处理中使用(即由后面有计算机的成像传感器执行)匹配滤波器,以进一步减少斑点并且由此改进SNR。例如,可使用具有与粒子图像相同形状(环形)的简单的数字图像处理滤波器,而在其他实施例中可使用其他类型的滤波器。注意,匹配滤波器可应用于P偏振照射,而非S偏振照射。虽然P偏振照射的散射比S偏振照射的散射强很多,但是P偏振可在低雾度(haze)的晶片(诸如经抛光的Si(硅)晶片和一些平滑的多晶硅晶片)上提供最佳灵敏度。
在一个实施例中,SNR可由物镜和成像传感器之间的成像路径中的径向偏光器进一步增强,以使偏振与径向对准。该径向偏光器可减少斑点,同时传递来自小粒子的大多数散射光。照射偏振和成像偏振的各种组合可用于特定缺陷类型。例如,照射光束的偏振可在与x或y平行的相同方向上对准,并且线性偏光器可用于与照射偏振平行或垂直的收集路径。这些配置对于其中图案特性趋于与x和y方向对准的经图案化的晶片检查可能是有利的。值得注意的是,单独的激光器允许照射的径向或切向偏振,这在单个点光源的情况下将是不可能的。
可提供递送多个激光束来形成环形照射、由此使多个光束彼此不相干的各种方法。例如,在一个实施例中,可经由多模光纤从多个激光器递送激光束。注意,通过使用光纤作为光源,这些源可置于离晶片相对较远,由此提供其中空间是非常珍贵的系统配置灵活性。在另一实施例中,来自单个激光器的光束可以首先进行斑点处理,由此消除源自相同激光器的光束之间的相关性,并且随后耦合至多个光纤以从多个角照射晶片。
在图9所示的示例性检查系统900中,调制器907可调制(例如,摇动)来自多个激光器910的光纤,这些光纤经由多模光纤908递送。该调制可使用多模干扰来最小化来自激光源的斑点。在该实施例中,透镜904可将在位置911存在的光准直并定向到镜子903上,该镜子903与抛物线镜子905一起可将宽的、大的立体角的光提供到晶片912上。来自晶片912的散射光可由物镜906(其由于只保留用于成像/收集而具有大的NA)聚集,并且随后由放大管透镜902聚焦到成像传感器901上。在又一实施例中,来自单个激光器的光束可分成多个光束,并且经由多模光纤递送,其中多模光纤可被调制成使斑点最小化。
注意,可使用除激光器或激光二极管以外的光源。例如,图10示出其中光管1002可捕捉宽带(不相干的)光源1001输出的光的示例性检查系统1000。聚光透镜1003可将光管1002所输出的不相干的、发散光准直到镜子903和参考图9所描述的其他组件(其中类似的组件标记相同)上。因此,该实施例具有图9所描述的优点以及使用不同波长的附加优点,由此进一步增强求平均。
图11示出组合不同波长的激光束以增加平均效应。在一个实施例中,可使用二向色光束组合器1105和1106(其反射第一波长并传递第二波长)来组合来自激光器1101、1102和1103的光束(分别以λ1、λ2和λ3的波长)。在该实施例中,透镜107、108和109在组合之前准直激光束。在组合之后,变形(anamorphic)光束成形光学器件1104可引入组合光束的沿纵轴的不相等的放大,由此独立地改变其长度或宽度。圆柱形透镜1110形成至晶片表面的聚焦线。值得注意的是,在检测和标识晶片上的不同缺陷(例如,粒子)时,某些波长比其他波长可能更有效。因此,使用包括多个波长的光束可改进对晶片上不同类型的缺陷的检测和标识。
图12示出其中具有三个不同波长(λ1、λ2和λ3)的多个光源可交错的实施例。与图11所示的实施例相比,该交错增加了系统覆盖区域(footprint),但是未提供针对特定波长跟踪缺陷检测响应的能力。注意,像图11所示的实施例一样,使用不同波长的激光束可增加平均效应,并且改进缺陷检测和标识。
图13示出包括多个检测通道的示例性检查系统1300。在该实施例中,由冲击晶片1311的倾斜环形照射1310产生的散射光可由物镜906聚集,并且随后被放大管透镜902聚焦到第一成像传感器1302和第二成像传感器1303上。值得注意的是,二向色分束器1301可基于波长分割光,并且将每一波长定向到特定成像传感器。例如,波长λ1可被定向到成像传感器1302,而波长λ2可被定向到成像传感器1303。注意,在其他实施例中,另一分束器可基于三个或更多个波长分割光,并且将该光定向到三个或更多个检测通道。在使用三个波长的一个实施例中,检查系统可选择两个检测通道。值得注意的是,基于不同波长提供多个检测通道可进一步增强缺陷检测和分类。
图14示出其中漫射器1402可接收来自激光器1401的相干光并生成不相干光的示例性检查系统1400。该不相干光可被光纤束1403捕捉,其中各个光纤可用作光源。圆柱形透镜(为了简便起见未示出)可如以上所描述地旋转和倾斜,并且随后被配置成提供环形照射1404。包括物镜906、放大管透镜902和成像传感器901的成像路径可用于捕捉来自晶片1405的散射光。注意,不相干光可改进求平均,由此使斑点最小化。
以上所描述的使用环形照射的暗场检查系统可提供高的NA,并且最小化斑点,由此产生经改进的分辨率和灵敏度。可在图像处理中使用与粒子的环形图像相匹配的数字滤波器来进一步增强该系统的SNR。光源可包括,但不限于,激光二极管、激光器、宽带光源、超连续光源、以及多线激光器。
为了清楚起见,在上文中未描述实际实现的所有特征。应当理解,在任何此类实际实施例的开发中,必须作出多个实现专用判断以达到开发者的特定目标,诸如遵循系统相关和事务相关的约束,这些约束将随实现不同而变化。此外,应当理解,此类开发努力可能是复杂且费时的,但仍然是本领域技术人员利用本公开来承担的日常事务。
对本发明的优选实施例的先前描述是出于说明和描述的目的而呈现的。它并不旨在穷尽,或将本发明限于所公开的准确形式。根据以上教义,显而易见的修改或变体是可行的。选择和描述实施例是为了提供本发明的原理以及其实际应用的最佳说明,且由此使本领域普通技术人员能够在各个实施例中利用本发明,并且构想了适于特定用途的各种修改。例如,虽然在本文中描述了包括扫描仪的实施例,但是本发明同样可应用于步进器以及能够调制聚焦和曝光的任何工具。当根据公平地、合法地且公正地适用广度来解释所附权利要求书时,所有此类修改和变体都在如所附权利要求书所确定的本发明的范围内。
Claims (36)
1.一种暗场检查系统,包括:
用于在晶片上生成合成的、聚焦照射线的多个光束成形路径,每一光束成形路径用于以斜角照射所述晶片,所述多个光束成形路径形成环形照射;
用于捕捉来自所述晶片的散射光的物镜;以及
用于接收所述物镜的输出的成像传感器。
2.如权利要求1所述的暗场检查系统,其特征在于,所述多个光束成形路径中的每一个包括光源。
3.如权利要求2所述的暗场检查系统,其特征在于,所述多个光束成形路径中的每一个包括圆柱形透镜,每一圆柱形透镜相对于来自其相应光源的光束倾斜和旋转。
4.如权利要求3所述的暗场检查系统,其特征在于,相对于样本表面法线的所述斜角在60-85度之间。
5.如权利要求3所述的暗场检查系统,其特征在于,所述物镜的数值孔径(NA)至少为0.5。
6.如权利要求3所述的暗场检查系统,其特征在于,每一圆柱形透镜具有与照射线平行放置的圆柱轴。
7.如权利要求6所述的暗场检查系统,其特征在于,每一圆柱形透镜绕其圆柱轴旋转以使像差最小化。
8.如权利要求6所述的暗场检查系统,其特征在于,至少一个光束成形路径包括第一、第二和第三圆柱形透镜,其中所述第一和第二圆柱形透镜之一在任何时间点都位于所述光束成形路径中,其中所述第一和第二圆柱形透镜中的每一个确定所述照射线的长度,并且其中所述第三圆柱形透镜确定所述照射线的宽度。
9.如权利要求6所述的暗场检查系统,其特征在于,至少一个光束成形路径包括连续缩放透镜和圆柱形透镜,其中所述连续缩放透镜允许在预定范围内选择特定照射线长度,并且其中所述圆柱形透镜确定所述照射线的宽度。
10.如权利要求3所述的暗场检查系统,其特征在于,所述成像传感器包括与所述晶片上的粒子的形状相匹配的数字图像处理滤波器。
11.如权利要求9所述的暗场检查系统,其特征在于,所述形状是环状。
12.如权利要求3所述的暗场检查系统,其特征在于,每一光源是激光器。
13.如权利要求1所述的暗场检查系统,其特征在于,所述多个光束成形路径包括:
多个激光器;
耦合到所述多个激光器的多模光纤;
用于调制所述多模光纤所携带的光束的调制器;以及
用于反射和引导用于生成所述照射线的光束的镜子。
14.如权利要求13所述的暗场检查系统,其特征在于,所述镜子包括非球面环形镜子。
15.如权利要求1所述的暗场检查系统,其特征在于,所述多个光束成形路径包括:
宽带光源;
接收所述宽带光源的输出的光管;
用于准直所述光管的输出的聚光透镜;以及
用于反射和引导从所述聚光透镜输出的、用于生成所述照射线的光束的镜子。
16.如权利要求15所述的暗场检查系统,其特征在于,所述镜子包括非球面环形镜子。
17.如权利要求2所述的暗场检查系统,其特征在于,至少一个光源包括用于生成具有多个波长的激光束的多个激光器和二向色光束组合器。
18.如权利要求2所述的暗场检查系统,其特征在于,每一光源是激光器,并且相邻光束成形路径具有不同波长的激光器。
19.如权利要求1所述的暗场检查系统,其特征在于,所述多个光束成形路径包括:
激光器;
耦合到所述激光器的漫射器;以及
用于接收所述漫射器的输出的光纤束,
其中每一光纤贡献光以形成所述照射线。
20.如权利要求3所述的暗场检查系统,其特征在于,每一光源是激光器。
21.如权利要求3所述的暗场检查系统,其特征在于,每一光源是激光二极管。
22.如权利要求1所述的暗场检查系统,其特征在于,还包括被放置成接收所述物镜的输出的分束器,其中所述成像传感器包括用于检测所述分束器所输出的光的第一波长的第一成像传感器以及用于检测所述分束器所输出的光的第二波长的第二成像传感器。
23.如权利要求1所述的暗场检查系统,其特征在于,还包括被放置成接收所述物镜的输出的分束器,其中所述成像传感器包括多个成像传感器,每一成像传感器用于检测所述分束器所输出的光的特定波长。
24.如权利要求23所述的暗场检查系统,其特征在于,选择所述多个成像传感器的子集以供图像分析。
25.一种配置暗场检查系统的方法,所述方法包括:
形成多个光束成形路径以提供环形照射,每一光束成形路径用于以斜角照射晶片,其中所述多个光束成形路径的输出在所述晶片上形成聚焦照射线。
26.如权利要求25所述的方法,其特征在于,形成所述多个光束成形路径包括倾斜和旋转每一光束成形路径中的至少一个圆柱形透镜。
27.如权利要求26所述的方法,其特征在于,每一圆柱形透镜具有与照射线平行放置的圆柱轴。
28.如权利要求27所述的方法,其特征在于,还包括绕其圆柱轴旋转至少一个圆柱形透镜以使像差最小化。
29.如权利要求26所述的方法,其特征在于,还包括使用第一圆柱形透镜来确定所述照射线的长度,以及使用第二圆柱形透镜来确定所述照射线的宽度。
30.如权利要求26所述的方法,其特征在于,还包括使用缩放透镜来确定所述照射线的长度,以及使用圆柱形透镜来确定所述照射线的宽度。
31.如权利要求25所述的方法,其特征在于,形成所述多个光束成形路径包括:
将多模光纤耦合到相干光源的输出;
调制所述多模光纤所携带的光束;以及
反射和引导用于生成所述照射线的经调制光束。
32.如权利要求25所述的方法,其特征在于,形成所述多个光束成形路径包括:
将光管耦合到不相干光源的输出;
准直所述光管的输出;以及
反射和引导用于生成所述照射线的光束经准直的输出。
33.如权利要求25所述的方法,其特征在于,形成所述多个光束成形路径包括:
在至少一个光束成形路径中,组合来自多个激光器的输出,每一激光器具有不同的波长。
34.如权利要求25所述的方法,其特征在于,形成所述多个光束成形路径包括:
在相邻光束成形路径中提供具有不同波长的激光。
35.如权利要求25所述的方法,其特征在于,形成所述多个光束成形路径包括:
将漫射器耦合到激光器的输出;以及
将光纤束耦合到所述漫射器的输出,
其中所述光纤束的每一光纤贡献光以形成所述照射线。
36.如权利要求25所述的方法,其特征在于,所述斜角相对于样本表面法线在60-85度之间。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US22771309P | 2009-07-22 | 2009-07-22 | |
| US61/227,713 | 2009-07-22 | ||
| PCT/US2010/042354 WO2011011291A1 (en) | 2009-07-22 | 2010-07-16 | Dark field inspection system with ring illumination |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN102473663A true CN102473663A (zh) | 2012-05-23 |
| CN102473663B CN102473663B (zh) | 2016-11-09 |
Family
ID=43499363
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201080033782.9A Active CN102473663B (zh) | 2009-07-22 | 2010-07-16 | 用环形照射的暗场检查系统 |
Country Status (8)
| Country | Link |
|---|---|
| US (1) | US9176072B2 (zh) |
| EP (1) | EP2457251A4 (zh) |
| JP (2) | JP5639169B2 (zh) |
| KR (1) | KR101803109B1 (zh) |
| CN (1) | CN102473663B (zh) |
| IL (1) | IL217178A (zh) |
| TW (1) | TWI536012B (zh) |
| WO (1) | WO2011011291A1 (zh) |
Cited By (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN106066562A (zh) * | 2015-04-21 | 2016-11-02 | 康代有限公司 | 具有扩展的角覆盖范围的检查系统 |
| CN107340297A (zh) * | 2016-04-28 | 2017-11-10 | 佳能株式会社 | 检查装置、检查系统和物品制造方法 |
| CN107727668A (zh) * | 2017-11-03 | 2018-02-23 | 浙江科技学院 | 基于偏振消光的透明介质单面选择成像方法及其装置 |
| CN109973858A (zh) * | 2017-12-28 | 2019-07-05 | 中国科学院深圳先进技术研究院 | 一种用于水下暗场成像的照明器 |
| CN110487813A (zh) * | 2018-05-15 | 2019-11-22 | 康代有限公司 | 串扰检测 |
| CN111164727A (zh) * | 2017-09-29 | 2020-05-15 | Asml荷兰有限公司 | 用于晶圆检查的高级充电控制器的方法和设备 |
| CN112098421A (zh) * | 2020-09-15 | 2020-12-18 | 上海微电子装备(集团)股份有限公司 | 暗场检测装置 |
| CN113490844A (zh) * | 2019-02-21 | 2021-10-08 | Fk光学研究所股份有限公司 | 异物检查装置及异物检查方法 |
| CN117538333A (zh) * | 2023-12-26 | 2024-02-09 | 苏州矽行半导体技术有限公司 | 镜头阵列和晶圆检测设备 |
| CN117589790A (zh) * | 2023-11-30 | 2024-02-23 | 魅杰光电科技(上海)有限公司 | 暗场照明装置及暗场照明的光学检测系统 |
Families Citing this family (33)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20130242083A1 (en) * | 2010-10-08 | 2013-09-19 | Timothy A. Potts | Retro-reflective imaging |
| US8885148B2 (en) | 2011-01-04 | 2014-11-11 | Asml Holding N.V. | System and method for design of linear motor for vacuum environment |
| US9267891B2 (en) * | 2011-06-06 | 2016-02-23 | The Regents Of The University Of California | Multiplex fluorescent particle detection using spatially distributed excitation |
| US8995746B2 (en) * | 2013-03-15 | 2015-03-31 | KLA—Tencor Corporation | Image synchronization of scanning wafer inspection system |
| CN103245671B (zh) * | 2013-05-09 | 2016-04-13 | 深圳先进技术研究院 | 冲压件表面缺陷检测装置及方法 |
| US9747670B2 (en) | 2013-06-26 | 2017-08-29 | Kla-Tencor Corporation | Method and system for improving wafer surface inspection sensitivity |
| US9846122B2 (en) | 2013-11-26 | 2017-12-19 | Nanometrics Incorporated | Optical metrology system for spectral imaging of a sample |
| US9182351B2 (en) | 2013-11-26 | 2015-11-10 | Nanometrics Incorporated | Optical metrology system for spectral imaging of a sample |
| KR102241978B1 (ko) | 2014-09-11 | 2021-04-19 | 삼성전자주식회사 | 피검체의 표면 검사 방법 및 이를 수행하기 위한 광학 시스템 |
| US9891177B2 (en) * | 2014-10-03 | 2018-02-13 | Kla-Tencor Corporation | TDI sensor in a darkfield system |
| US9395309B2 (en) | 2014-10-15 | 2016-07-19 | Exnodes Inc. | Multiple angle computational wafer inspection |
| CN104407453A (zh) * | 2014-12-17 | 2015-03-11 | 中国电子科技集团公司第三十八研究所 | 一种光控型可调太赫兹波衰减器及其使用方法 |
| JP6522384B2 (ja) * | 2015-03-23 | 2019-05-29 | 三菱重工業株式会社 | レーザレーダ装置及び走行体 |
| US10192716B2 (en) | 2015-09-21 | 2019-01-29 | Kla-Tencor Corporation | Multi-beam dark field imaging |
| US10739275B2 (en) * | 2016-09-15 | 2020-08-11 | Kla-Tencor Corporation | Simultaneous multi-directional laser wafer inspection |
| WO2018160595A2 (en) | 2017-02-28 | 2018-09-07 | The Regents Of The University Of California | Optofluidic analyte detection systems using multi-mode interference waveguides |
| WO2018191489A1 (en) | 2017-04-12 | 2018-10-18 | Sense Photonics, Inc. | Ultra-small vertical cavity surface emitting laser (vcsel) and arrays incorporating the same |
| US11237872B2 (en) | 2017-05-23 | 2022-02-01 | Kla-Tencor Corporation | Semiconductor inspection and metrology systems for distributing job among the CPUs or GPUs based on logical image processing boundaries |
| KR101969232B1 (ko) * | 2017-10-31 | 2019-04-17 | 주식회사 이노비즈 | 측면 비전 장치 |
| WO2019147730A1 (en) * | 2018-01-24 | 2019-08-01 | Corning Incorporated | Apparatus and methods for inspecting damage intensity |
| EP3611569A1 (en) * | 2018-08-16 | 2020-02-19 | ASML Netherlands B.V. | Metrology apparatus and photonic crystal fiber |
| US10942135B2 (en) * | 2018-11-14 | 2021-03-09 | Kla Corporation | Radial polarizer for particle detection |
| DE102019125127A1 (de) * | 2019-09-18 | 2021-03-18 | Mühlbauer Gmbh & Co. Kg | Bauteilhandhabung, Bauteilinspektion |
| CN112697794A (zh) * | 2019-10-23 | 2021-04-23 | 上海微电子装备(集团)股份有限公司 | 一种掩模版检测装置、光刻设备及掩模版检测方法 |
| US11397153B2 (en) * | 2019-12-03 | 2022-07-26 | Kla Corporation | Apparatus and method for gray field imaging |
| US11733172B2 (en) * | 2020-05-15 | 2023-08-22 | Kla Corporation | Apparatus and method for rotating an optical objective |
| CN112179909B (zh) * | 2020-10-19 | 2024-09-20 | 中国工程物理研究院激光聚变研究中心 | 微型大视场超分辨显微成像装置 |
| WO2022176208A1 (ja) | 2021-02-22 | 2022-08-25 | 株式会社 ジャパンセル | 所定光生成方法、所定光利用方法、所定光を利用したサービス提供方法、測定/イメージング方法、光学特性変換素子、光源部、計測部、測定装置、所定光利用装置およびサービス提供システム |
| KR102864165B1 (ko) | 2021-10-20 | 2025-09-24 | 주식회사 엘지에너지솔루션 | 원통형 전지 측면 검사 장치 |
| US20240104777A1 (en) * | 2022-09-23 | 2024-03-28 | Apple Inc. | Camera-alignment-based fault detection for physical components |
| WO2025187232A1 (ja) * | 2024-03-04 | 2025-09-12 | パナソニックIpマネジメント株式会社 | レンズ、光学システム、撮像装置及び検査装置 |
| CN119556513B (zh) * | 2024-12-16 | 2026-02-10 | 中国科学院空天信息创新研究院 | 一种基于空心方环激光照明的水下成像装置 |
| KR102874969B1 (ko) * | 2025-06-24 | 2025-10-23 | 주식회사 블루타일랩 | 워피지 검사를 위한 빔 패턴 분석 장치 및 이를 포함하는 웨이퍼 검사 장치 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN1424576A (zh) * | 2001-12-04 | 2003-06-18 | 株式会社拓普康 | 表面检查装置 |
| CN1685220A (zh) * | 2002-09-30 | 2005-10-19 | 应用材料以色列股份有限公司 | 暗场检测系统 |
| US20070182958A1 (en) * | 2006-02-08 | 2007-08-09 | Yuji Manabe | Apparatus and method for wafer surface defect inspection |
| US20070206184A1 (en) * | 2006-03-01 | 2007-09-06 | Sachio Uto | Defect inspection method and system |
Family Cites Families (33)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5630630A (en) * | 1979-08-23 | 1981-03-27 | Hitachi Ltd | Foreign matter detector |
| US4740079A (en) | 1984-10-29 | 1988-04-26 | Hitachi, Ltd. | Method of and apparatus for detecting foreign substances |
| JPS61104243A (ja) | 1984-10-29 | 1986-05-22 | Hitachi Ltd | 異物検出方法及びその装置 |
| JPH02175090A (ja) * | 1988-12-27 | 1990-07-06 | Isamu Miyamoto | レーザビーム成形装置 |
| JPH0432067A (ja) | 1990-05-28 | 1992-02-04 | Mitsubishi Electric Corp | 磁気記録再生装置 |
| JPH0432067U (zh) * | 1990-07-12 | 1992-03-16 | ||
| JPH0682376A (ja) | 1992-09-03 | 1994-03-22 | Toshiba Corp | 表面検査装置 |
| JP3593375B2 (ja) * | 1995-02-07 | 2004-11-24 | 株式会社日立製作所 | 微小欠陥検出方法及びその装置 |
| WO1996039619A1 (en) * | 1995-06-06 | 1996-12-12 | Kla Instruments Corporation | Optical inspection of a specimen using multi-channel responses from the specimen |
| US6064517A (en) * | 1996-07-22 | 2000-05-16 | Kla-Tencor Corporation | High NA system for multiple mode imaging |
| US5717518A (en) * | 1996-07-22 | 1998-02-10 | Kla Instruments Corporation | Broad spectrum ultraviolet catadioptric imaging system |
| US5953130A (en) * | 1997-01-06 | 1999-09-14 | Cognex Corporation | Machine vision methods and apparatus for machine vision illumination of an object |
| US6366690B1 (en) * | 1998-07-07 | 2002-04-02 | Applied Materials, Inc. | Pixel based machine for patterned wafers |
| US7136159B2 (en) * | 2000-09-12 | 2006-11-14 | Kla-Tencor Technologies Corporation | Excimer laser inspection system |
| US6538730B2 (en) * | 2001-04-06 | 2003-03-25 | Kla-Tencor Technologies Corporation | Defect detection system |
| WO2003021231A2 (en) * | 2001-09-05 | 2003-03-13 | Genicon Sciences Corporation | Method and apparatus for normalization and deconvolution of assay data |
| US6532064B1 (en) * | 2001-10-16 | 2003-03-11 | Baader-Canpolar Inc. | Automatic inspection apparatus and method for simultaneous detection of anomalies in a 3-dimensional translucent object |
| US7088443B2 (en) * | 2002-02-11 | 2006-08-08 | Kla-Tencor Technologies Corporation | System for detecting anomalies and/or features of a surface |
| US7106432B1 (en) * | 2002-09-27 | 2006-09-12 | Kla-Tencor Technologies Corporation | Surface inspection system and method for using photo detector array to detect defects in inspection surface |
| US20040156539A1 (en) * | 2003-02-10 | 2004-08-12 | Asm Assembly Automation Ltd | Inspecting an array of electronic components |
| US7227984B2 (en) * | 2003-03-03 | 2007-06-05 | Kla-Tencor Technologies Corporation | Method and apparatus for identifying defects in a substrate surface by using dithering to reconstruct under-sampled images |
| US7365834B2 (en) * | 2003-06-24 | 2008-04-29 | Kla-Tencor Technologies Corporation | Optical system for detecting anomalies and/or features of surfaces |
| US7433031B2 (en) * | 2003-10-29 | 2008-10-07 | Core Tech Optical, Inc. | Defect review system with 2D scanning and a ring detector |
| US7319229B2 (en) | 2003-12-29 | 2008-01-15 | Kla-Tencor Technologies Corporation | Illumination apparatus and methods |
| DE102004004761A1 (de) * | 2004-01-30 | 2005-09-08 | Leica Microsystems Semiconductor Gmbh | Vorrichtung und Verfahren zur Inspektion eines Wafers |
| JP4751617B2 (ja) | 2005-01-21 | 2011-08-17 | 株式会社日立ハイテクノロジーズ | 欠陥検査方法及びその装置 |
| KR100663365B1 (ko) * | 2005-07-18 | 2007-01-02 | 삼성전자주식회사 | 내부에 적어도 한 쌍의 빔 경로들을 갖는 렌즈 유니트를구비하는 광학적 검사장비들 및 이를 사용하여 기판의 표면결함들을 검출하는 방법들 |
| JP4996856B2 (ja) * | 2006-01-23 | 2012-08-08 | 株式会社日立ハイテクノロジーズ | 欠陥検査装置およびその方法 |
| JP2008002932A (ja) * | 2006-06-22 | 2008-01-10 | Tokyo Seimitsu Co Ltd | 試料撮像装置及び試料の照明方法 |
| JP2008046075A (ja) * | 2006-08-21 | 2008-02-28 | Omron Corp | 光学系、薄膜評価装置および薄膜評価方法 |
| US20080297786A1 (en) * | 2007-05-31 | 2008-12-04 | Hitachi High-Technologies Corporation | Inspecting device and inspecting method |
| US7986412B2 (en) * | 2008-06-03 | 2011-07-26 | Jzw Llc | Interferometric defect detection and classification |
| DE102009000528B4 (de) * | 2009-01-30 | 2011-04-07 | Nanophotonics Ag | Inspektionsvorrichtung und -verfahren für die optische Untersuchung von Objektoberflächen, insbesondere von Waferoberflächen |
-
2010
- 2010-07-16 JP JP2012521696A patent/JP5639169B2/ja active Active
- 2010-07-16 US US12/919,760 patent/US9176072B2/en active Active
- 2010-07-16 KR KR1020127004139A patent/KR101803109B1/ko active Active
- 2010-07-16 WO PCT/US2010/042354 patent/WO2011011291A1/en not_active Ceased
- 2010-07-16 EP EP10802700.4A patent/EP2457251A4/en not_active Withdrawn
- 2010-07-16 CN CN201080033782.9A patent/CN102473663B/zh active Active
- 2010-07-22 TW TW099124187A patent/TWI536012B/zh active
-
2011
- 2011-12-25 IL IL217178A patent/IL217178A/en active IP Right Grant
-
2014
- 2014-07-07 JP JP2014140065A patent/JP6072733B2/ja active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN1424576A (zh) * | 2001-12-04 | 2003-06-18 | 株式会社拓普康 | 表面检查装置 |
| CN1685220A (zh) * | 2002-09-30 | 2005-10-19 | 应用材料以色列股份有限公司 | 暗场检测系统 |
| US20070182958A1 (en) * | 2006-02-08 | 2007-08-09 | Yuji Manabe | Apparatus and method for wafer surface defect inspection |
| US20070206184A1 (en) * | 2006-03-01 | 2007-09-06 | Sachio Uto | Defect inspection method and system |
Cited By (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN106066562A (zh) * | 2015-04-21 | 2016-11-02 | 康代有限公司 | 具有扩展的角覆盖范围的检查系统 |
| CN106066562B (zh) * | 2015-04-21 | 2020-07-10 | 康代有限公司 | 具有扩展的角覆盖范围的检查系统 |
| CN107340297A (zh) * | 2016-04-28 | 2017-11-10 | 佳能株式会社 | 检查装置、检查系统和物品制造方法 |
| US11482399B2 (en) | 2017-09-29 | 2022-10-25 | Asml Netherlands B.V. | Method and apparatus for an advanced charged controller for wafer inspection |
| CN111164727A (zh) * | 2017-09-29 | 2020-05-15 | Asml荷兰有限公司 | 用于晶圆检查的高级充电控制器的方法和设备 |
| CN107727668A (zh) * | 2017-11-03 | 2018-02-23 | 浙江科技学院 | 基于偏振消光的透明介质单面选择成像方法及其装置 |
| CN107727668B (zh) * | 2017-11-03 | 2023-11-14 | 浙江科技学院 | 基于偏振消光的透明介质单面选择成像方法及其装置 |
| CN109973858A (zh) * | 2017-12-28 | 2019-07-05 | 中国科学院深圳先进技术研究院 | 一种用于水下暗场成像的照明器 |
| CN109973858B (zh) * | 2017-12-28 | 2022-03-08 | 中国科学院深圳先进技术研究院 | 一种用于水下暗场成像的照明器 |
| CN110487813A (zh) * | 2018-05-15 | 2019-11-22 | 康代有限公司 | 串扰检测 |
| CN113490844A (zh) * | 2019-02-21 | 2021-10-08 | Fk光学研究所股份有限公司 | 异物检查装置及异物检查方法 |
| CN112098421A (zh) * | 2020-09-15 | 2020-12-18 | 上海微电子装备(集团)股份有限公司 | 暗场检测装置 |
| CN117589790A (zh) * | 2023-11-30 | 2024-02-23 | 魅杰光电科技(上海)有限公司 | 暗场照明装置及暗场照明的光学检测系统 |
| CN117538333A (zh) * | 2023-12-26 | 2024-02-09 | 苏州矽行半导体技术有限公司 | 镜头阵列和晶圆检测设备 |
Also Published As
| Publication number | Publication date |
|---|---|
| US9176072B2 (en) | 2015-11-03 |
| TW201132960A (en) | 2011-10-01 |
| EP2457251A4 (en) | 2017-11-08 |
| JP2012533756A (ja) | 2012-12-27 |
| WO2011011291A1 (en) | 2011-01-27 |
| JP2014222239A (ja) | 2014-11-27 |
| KR20120052994A (ko) | 2012-05-24 |
| IL217178A (en) | 2017-04-30 |
| IL217178A0 (en) | 2012-02-29 |
| EP2457251A1 (en) | 2012-05-30 |
| CN102473663B (zh) | 2016-11-09 |
| JP6072733B2 (ja) | 2017-02-01 |
| JP5639169B2 (ja) | 2014-12-10 |
| US20110169944A1 (en) | 2011-07-14 |
| TWI536012B (zh) | 2016-06-01 |
| KR101803109B1 (ko) | 2017-11-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN102473663B (zh) | 用环形照射的暗场检查系统 | |
| JP4908925B2 (ja) | ウェハ表面欠陥検査装置およびその方法 | |
| JP6010042B2 (ja) | ウェーハ検査 | |
| JP7134096B2 (ja) | 基板検査方法、装置及びシステム | |
| US7339661B2 (en) | Dark field inspection system | |
| US10942135B2 (en) | Radial polarizer for particle detection | |
| US20060290923A1 (en) | Method and apparatus for detecting defects | |
| US7265900B2 (en) | Inspection system with oblique viewing angle | |
| KR102768836B1 (ko) | 민감한 입자 검출을 위한 연속 축퇴 타원형 리타더 | |
| WO2011001651A1 (ja) | 欠陥検査方法及び欠陥検査装置 | |
| JP7344225B2 (ja) | 結像系設計における微分干渉コントラストの走査 | |
| JP2009063383A (ja) | 検査装置及び検査方法 | |
| WO2021199340A1 (ja) | 欠陥検査装置及び欠陥検査方法 | |
| JP2005308725A (ja) | 透明板欠陥検査装置 | |
| JP5299764B2 (ja) | 評価装置および評価方法 | |
| JP2008267817A (ja) | 表面検査方法及び表面検査装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant |