TWI822863B - 360度視訊寫碼樣本導出 - Google Patents
360度視訊寫碼樣本導出 Download PDFInfo
- Publication number
- TWI822863B TWI822863B TW108134379A TW108134379A TWI822863B TW I822863 B TWI822863 B TW I822863B TW 108134379 A TW108134379 A TW 108134379A TW 108134379 A TW108134379 A TW 108134379A TW I822863 B TWI822863 B TW I822863B
- Authority
- TW
- Taiwan
- Prior art keywords
- picture
- reference sample
- offset
- surround
- width
- Prior art date
Links
- 238000009795 derivation Methods 0.000 title description 5
- 239000013074 reference sample Substances 0.000 claims abstract description 135
- 239000000523 sample Substances 0.000 claims abstract description 122
- 230000033001 locomotion Effects 0.000 claims abstract description 58
- 238000000034 method Methods 0.000 claims abstract description 41
- 238000003860 storage Methods 0.000 claims description 7
- 230000003252 repetitive effect Effects 0.000 abstract 1
- 238000004891 communication Methods 0.000 description 40
- 230000006870 function Effects 0.000 description 29
- 238000005516 engineering process Methods 0.000 description 26
- 238000012545 processing Methods 0.000 description 14
- 239000013598 vector Substances 0.000 description 14
- 230000008569 process Effects 0.000 description 12
- 238000005070 sampling Methods 0.000 description 12
- 230000005540 biological transmission Effects 0.000 description 11
- 238000012360 testing method Methods 0.000 description 11
- 241000023320 Luma <angiosperm> Species 0.000 description 10
- 238000007726 management method Methods 0.000 description 10
- OSWPMRLSEDHDFF-UHFFFAOYSA-N methyl salicylate Chemical compound COC(=O)C1=CC=CC=C1O OSWPMRLSEDHDFF-UHFFFAOYSA-N 0.000 description 10
- 238000010586 diagram Methods 0.000 description 8
- 238000001228 spectrum Methods 0.000 description 7
- 230000002123 temporal effect Effects 0.000 description 7
- 238000012856 packing Methods 0.000 description 5
- 230000002093 peripheral effect Effects 0.000 description 5
- 230000001681 protective effect Effects 0.000 description 5
- 238000013507 mapping Methods 0.000 description 4
- 238000013139 quantization Methods 0.000 description 4
- 230000009466 transformation Effects 0.000 description 4
- 239000000969 carrier Substances 0.000 description 3
- 208000037170 Delayed Emergence from Anesthesia Diseases 0.000 description 2
- 101100172132 Mus musculus Eif3a gene Proteins 0.000 description 2
- 238000004873 anchoring Methods 0.000 description 2
- 230000001413 cellular effect Effects 0.000 description 2
- 238000010276 construction Methods 0.000 description 2
- 230000009977 dual effect Effects 0.000 description 2
- 238000005538 encapsulation Methods 0.000 description 2
- 238000001914 filtration Methods 0.000 description 2
- 239000004973 liquid crystal related substance Substances 0.000 description 2
- 229910001416 lithium ion Inorganic materials 0.000 description 2
- QELJHCBNGDEXLD-UHFFFAOYSA-N nickel zinc Chemical compound [Ni].[Zn] QELJHCBNGDEXLD-UHFFFAOYSA-N 0.000 description 2
- 230000003287 optical effect Effects 0.000 description 2
- 230000011218 segmentation Effects 0.000 description 2
- 238000004088 simulation Methods 0.000 description 2
- 229910052721 tungsten Inorganic materials 0.000 description 2
- 241000760358 Enodes Species 0.000 description 1
- 230000005355 Hall effect Effects 0.000 description 1
- HBBGRARXTFLTSG-UHFFFAOYSA-N Lithium ion Chemical compound [Li+] HBBGRARXTFLTSG-UHFFFAOYSA-N 0.000 description 1
- 241000700159 Rattus Species 0.000 description 1
- 238000012952 Resampling Methods 0.000 description 1
- 230000009471 action Effects 0.000 description 1
- 230000004913 activation Effects 0.000 description 1
- 230000003044 adaptive effect Effects 0.000 description 1
- 230000002776 aggregation Effects 0.000 description 1
- 238000004220 aggregation Methods 0.000 description 1
- 230000003190 augmentative effect Effects 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- OJIJEKBXJYRIBZ-UHFFFAOYSA-N cadmium nickel Chemical compound [Ni].[Cd] OJIJEKBXJYRIBZ-UHFFFAOYSA-N 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 238000004590 computer program Methods 0.000 description 1
- 230000008878 coupling Effects 0.000 description 1
- 238000010168 coupling process Methods 0.000 description 1
- 238000005859 coupling reaction Methods 0.000 description 1
- 238000005520 cutting process Methods 0.000 description 1
- 125000004122 cyclic group Chemical group 0.000 description 1
- 230000009849 deactivation Effects 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 238000009826 distribution Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 239000000446 fuel Substances 0.000 description 1
- 230000036541 health Effects 0.000 description 1
- 230000003993 interaction Effects 0.000 description 1
- 230000007774 longterm Effects 0.000 description 1
- 230000005055 memory storage Effects 0.000 description 1
- 229910052987 metal hydride Inorganic materials 0.000 description 1
- 238000002156 mixing Methods 0.000 description 1
- 238000010295 mobile communication Methods 0.000 description 1
- 229910052759 nickel Inorganic materials 0.000 description 1
- PXHVJJICTQNCMI-UHFFFAOYSA-N nickel Substances [Ni] PXHVJJICTQNCMI-UHFFFAOYSA-N 0.000 description 1
- -1 nickel metal hydride Chemical class 0.000 description 1
- 238000005457 optimization Methods 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 238000009877 rendering Methods 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 230000011664 signaling Effects 0.000 description 1
- 238000001356 surgical procedure Methods 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
- 238000012549 training Methods 0.000 description 1
- 230000007704 transition Effects 0.000 description 1
- 238000013519 translation Methods 0.000 description 1
- 238000000411 transmission spectrum Methods 0.000 description 1
- 230000000007 visual effect Effects 0.000 description 1
Images







Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/50—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding
- H04N19/597—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding specially adapted for multi-view video sequence encoding
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/102—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or selection affected or controlled by the adaptive coding
- H04N19/132—Sampling, masking or truncation of coding units, e.g. adaptive resampling, frame skipping, frame interpolation or high-frequency transform coefficient masking
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/134—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or criterion affecting or controlling the adaptive coding
- H04N19/146—Data rate or code amount at the encoder output
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/169—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding
- H04N19/17—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding the unit being an image region, e.g. an object
- H04N19/172—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding the unit being an image region, e.g. an object the region being a picture, frame or field
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/169—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding
- H04N19/184—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding the unit being bits, e.g. of the compressed video stream
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/46—Embedding additional information in the video signal during the compression process
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/50—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding
- H04N19/503—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding involving temporal prediction
- H04N19/51—Motion estimation or motion compensation
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/50—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding
- H04N19/503—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding involving temporal prediction
- H04N19/51—Motion estimation or motion compensation
- H04N19/55—Motion estimation with spatial constraints, e.g. at image or region borders
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N21/00—Selective content distribution, e.g. interactive television or video on demand [VOD]
- H04N21/80—Generation or processing of content or additional data by content creator independently of the distribution process; Content per se
- H04N21/81—Monomedia components thereof
- H04N21/816—Monomedia components thereof involving special video data, e.g 3D video
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N21/00—Selective content distribution, e.g. interactive television or video on demand [VOD]
- H04N21/80—Generation or processing of content or additional data by content creator independently of the distribution process; Content per se
- H04N21/83—Generation or processing of protective or descriptive data associated with content; Content structuring
- H04N21/845—Structuring of content, e.g. decomposing content into time segments
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/102—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or selection affected or controlled by the adaptive coding
- H04N19/103—Selection of coding mode or of prediction mode
- H04N19/105—Selection of the reference unit for prediction within a chosen coding or prediction mode, e.g. adaptive choice of position and number of pixels used for prediction
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/169—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding
- H04N19/17—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding the unit being an image region, e.g. an object
- H04N19/176—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding the unit being an image region, e.g. an object the region being a block, e.g. a macroblock
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/60—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using transform coding
- H04N19/61—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using transform coding in combination with predictive coding
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/70—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals characterised by syntax aspects related to video coding, e.g. related to compression standards
Landscapes
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Compression Or Coding Systems Of Tv Signals (AREA)
Abstract
揭露了用於基於接收指示是否賦能水平環繞運動補償的環繞賦能指示來對目前樣本執行水平幾何結構填充的系統、方法和工具。如果基於該環繞賦能指示賦能該水平環繞運動補償,那麼視訊寫碼裝置可確定圖片中的目前樣本的參考樣本環繞偏移。該參考樣本環繞偏移可指示該圖片的面寬度。該視訊寫碼裝置可基於該參考樣本環繞偏移、該圖片的圖片寬度及目前樣本位置,確定該目前樣本的參考樣本位置。該視訊寫碼裝置可基於水平方向上的該參考樣本位置來預測該目前樣本。可以在垂直方向上使用重複填充或裁剪。
Description
本申請要求在2018年9月27日提交的美國臨時申請No.62/737,303的權益,其內容藉由引用而被併入本文。
虛擬實境(VR)正越來越多地進入我們的日常生活中。VR具有許多應用領域,這其中包括保健、教育、社交網路、工業設計/訓練、遊戲、電影、購物、娛樂等。VR正受到工業和消費者的關注,因為VR能夠帶來沉浸式觀看體驗。VR創建圍繞觀看者的虛擬環境,並且為觀看者產生“在那裡”的真實感覺。如何在VR環境中提供完全真實的感覺對於使用者的體驗是重要的。例如,VR系統可以藉由姿勢、手勢、眼睛注視、語音等來支援交互作用。為了允許使用者以自然的方式與VR世界中的物件交互作用,VR可以向使用者提供觸覺回饋。
揭露了用於基於接收指示了賦能水平環繞(wraparound)運動補償的環繞賦能指示來對目前樣本執行水平幾何結構填充的系統、方法和工具。
視訊寫碼(coding)裝置可在位元串流中接收與視訊內容相關聯的圖片。本文描述的視訊寫碼裝置可為或可包含編碼器及/或解碼器。該圖片可以是或者可以包括訊框封裝圖片。該視訊寫碼裝置可接收環繞賦能指示。
舉例來說,該視訊寫碼裝置可在序列級中接收環繞賦能指示。該環繞賦能指示可指示水平環繞運動補償是賦能還是停用。該環繞賦能指示可以是或可以包括環繞賦能標誌,該標誌指示該水平環繞運動補償是被賦能還是被停用。
基於指示了賦能水平環繞運動補償的該環繞賦能指示,該視訊寫碼裝置可確定該圖片中的目前樣本的參考樣本環繞偏移。在範例中,該視訊寫碼裝置可在該位元串流中接收關於參考樣本環繞偏移的偏移指示。可基於該偏移指示確定該參考樣本環繞偏移。該參考樣本環繞偏移可指示該圖片的面寬度。在範例中,該視訊寫碼裝置可接收指示該圖片的面寬度的大小指示。舉例來說,該大小指示可為或可包含亮度樣本中的保護帶的寬度。該視訊寫碼裝置可基於該大小指示計算圖片的面寬度,且可使用所計算的面寬度作為該參考樣本環繞偏移。在範例中,該保護帶可以具有相同的寬度。在範例中,該保護帶可以具有不同的寬度。
該視訊寫碼裝置可基於該參考樣本環繞偏移、該圖片的圖片寬度及目前樣本位置,確定該目前樣本的參考樣本位置。該視訊寫碼裝置可在序列級中接收該參考樣本環繞偏移。
在範例中,該視訊寫碼裝置可確定與該目前樣本位置相關聯的原始參考樣本位置(例如,原參考樣本位置)是否在該圖片之外。如果該原始參考樣本位置在該圖片之外,那麼視訊寫碼裝置可計算該參考樣本位置以用於水平幾何結構填充。舉例來說,該視訊寫碼裝置可藉由將該參考樣本環繞偏移應用於與該原始參考樣本位置相關聯的水平樣本座標來計算該參考樣本位置。
在範例中,該視訊寫碼裝置可基於該參考樣本環繞偏移及該圖片的圖片寬度計算該圖片的面寬度。該視訊寫碼裝置可識別該圖片中的目前
樣本位置。該視訊寫碼裝置可確定原始參考樣本位置是否在該圖片之外。如果該原始參考樣本位置在該圖片的最左水平邊界之外,那麼該視訊寫碼裝置可藉由將該參考樣本環繞偏移添加到與該原始參考樣本位置相關聯的水平樣本座標來確定該參考樣本位置。如果該原始參考樣本位置在該圖片的最右水平邊界之外,那麼該視訊寫碼裝置可藉由從與該原始參考樣本位置相關聯的水平樣本座標減去該參考樣本環繞偏移來確定該參考樣本位置。
該視訊寫碼裝置可基於該參考樣本位置來預測目前樣本。
該視訊寫碼裝置可基於該環繞賦能指示來確定是否停用該水平環繞運動補償。如果該環繞賦能指示了該水平環繞運動補償被停用,那麼該視訊寫碼裝置可識別該圖片中的該目前樣本位置。該視訊寫碼裝置可確定該目前樣本位置是否位於該圖片的水平邊界處。該視訊寫碼裝置可確定該參考樣本位置是否位於該圖片的水平邊界之外。如果視訊寫碼裝置確定該參考樣本位置位於該圖片的該水平邊界之外,那麼視訊寫碼裝置可識別該圖片的水平邊界上的該參考樣本位置。該視訊寫碼裝置可基於該參考樣本位置來預測目前樣本。
該圖片可以是或者可以包括等矩形投影(ERP)格式、等面積投影(EAP)格式或經調整的等面積投影(AEP)格式。
該視訊寫碼裝置可基於該環繞賦能指示,確定是否接收關於該參考樣本環繞偏移的偏移指示。如果該視訊寫碼裝置確定該環繞賦能指示被賦能,那麼視訊寫碼裝置可解析該位元串流以接收關於該參考樣本環繞偏移的該偏移指示。如果視訊寫碼裝置確定該環繞賦能指示被停用,那麼視訊寫碼裝置可跳過解析該位元串流且跳過接收關於該參考樣本環繞偏移的該偏移指示。
可以(例如,在位元串流中)用信號發送指示以賦能幾何結構填充。可以確定一個或複數球面相鄰者的正確位置。幾何結構填充可以應付保護帶的位置及/或大小,以計算一個或複數球面相鄰者的該正確位置。當在圖片中封裝一個或複數面時(例如,在編碼之前),該保護帶的位置及/或大小可能已被添加。可以用信號發送與幾何結構填充有關的一個或複數指示,以指示是否應用幾何結構填充及/或指定保護帶。
對於包括面(例如,單個面)的投影幾何結構,諸如ERP、EAP、AEP及/或類似的投影格式,可以在水平方向上執行幾何結構填充。當在水平方向上執行幾何結構填充時,可以在垂直方向上使用重複填充。樣本位置可被確定,因為水平樣本座標可於經寫碼的圖片內被回繞(wrapped)。例如,如在重複填充中那樣,垂直樣本座標可被裁剪到一個或一個以上經寫碼圖片邊界。可以確定用於與基於單個面的投影幾何結構相關聯的訊框間預測(例如,使用水平幾何結構填充)的整數樣本導出過程及/或分數樣本內插過程。
100:通信系統
102、102a、102b、102c、102d:無線傳輸/接收單元(WTRU)
104、113:無線電存取網路(RAN)
106、115:核心網路(CN)
108:公共交換電話網路(PSTN)
110:網際網路
112:其他網路
114a、114b:基地台
116:空中介面
118:處理器
120:收發器
122:傳輸/接收元件
124:揚聲器/麥克風
126:小鍵盤
128:顯示器/觸控板
130:非可移記憶體
132:可移記憶體
134:電源
136:全球定位系統(GPS)晶片組
138:週邊設備
160a、160b、160c:e節點B(eNB)
162:移動性管理閘道(MME)
164:服務閘道(SGW)
166:封包資料網路(PDN)閘道(或PGW)
180a、180b、180c、202、304、404、704:gNB
182a、182b:存取和移動性管理功能(AMF)
183a、183b:對話管理功能(SMF)
184a、184b:使用者平面功能(UPF)
185a、185b:資料網路(DN)
202、620:位元串流
208:熵解碼單元
210、610:逆量化
212、612:逆變換
220:重建視頻輸出
260、660:空間預測
262:運動補償預測
264、664:參考圖片儲存
266:環路濾波器
600:混合視訊編碼系統
602:輸入視訊訊號
604:變換模組
606:量化模組
608:熵寫碼單元
662:運動預測
680:模式決定
A0、A1、A2、A3、A4、A5、A6、θ:緯度
A、B、C、D、E、F、G、H、I、J、K、L、M、N、A'、B'、C'、D'、E'、F'、G'、H'、I'、J'、K'、L'、M'、N':樣本
Ai,j、a0,0~r0,0:亮度樣本
B0、B1、B0'、B1':參考塊
ERP:等矩形投影
F1:面
FOV:視場
L0、L1、L2、L3、L4、L5、L6、φ:經度
MV:運動向量
P0、P1、P2、P3:部分
PU:預測單元
TU:變換單元
圖1A示出了經度和緯度的範例球面取樣。
圖1B示出了具有等矩形投影的範例二維(2D)平面。
圖2A示出了用於立方圖(cubemap)投影(CMP)的範例三維(3D)幾何結構。
圖2B示出了用於CMP的六個面的範例2D平面。
圖3A示出了使用等矩形投影(ERP)的具有填充邊界的範例圖片。
圖3B示出了使用CMP的具有填充邊界的範例圖片。
圖4A示出了ERP的範例填充幾何結構。
圖4B示出了範例性的填充的ERP圖片。
圖5A示出了用於CMP的範例性填充幾何結構。
圖5B示出了範例性的填充的CMP面。
圖6示出了範例360度視訊工作流。
圖7示出了範例視訊編碼器。
圖8示出了範例視訊解碼器。
圖9示出了在訊框內預測中使用的範例參考樣本。
圖10示出了關於訊框內預測方向的範例指示。
圖11示出了利用運動向量的訊框間預測(例如,單向預測)的範例。
圖12示出了用於圖片邊界之外的參考樣本的範例填充。
圖13示出了在確定空間合併候選者時使用的範例空間相鄰者。
圖14示出了當使用水平幾何結構填充時用於訊框間預測的重建樣本的範例快取。
圖15說明用於四分之一樣本亮度內插的範例整數樣本(例如,具有大寫字母的陰影塊)和分數樣本位置(例如,具有小寫字母的非陰影塊)。
圖16A是示出了其中可以實施一個或複數揭露的實施例的範例性通信系統的系統圖。
圖16B是示出了可在圖16A中所示的通信系統內使用的範例性無線傳輸/接收單元(WTRU)的系統圖。
圖16C是可在圖16A中所示的通信系統內使用的範例性無線電存取網路(RAN)和範例性核心網路(CN)的系統圖。
圖16D是可在圖16A中所示的通信系統內使用的另一範例性RAN和另一範例性CN的系統圖。
現在將參考各個附圖來描述說明性實施例的詳細描述。儘管本說明書提供了可能實施方式的詳細範例,但是應當注意,這些細節旨在是範例性的,而不以任何方式限制本申請的範圍。
本文描述的360度視訊可以是或可以包括球面視訊、全向視訊、虛擬實境(VR)視訊、全景視訊、沉浸式視訊(例如,可以包括6個自由度的光場視訊)、及/或點雲視訊等。
VR系統可以使用360度視訊來向使用者提供在水平方向上從360度角度觀看場景以及在垂直方向上從180度角度觀看場景的能力。該VR系統及/或該360度視訊可以被認為是超高清(UHD)服務之外的媒體消費的方向。可以進行針對全向媒體應用格式的要求和潛在技術的工作,以提高VR系統中360度視訊的品質及/或標準化用於用戶端互通性的處理鏈。自由視野TV(FTV)可以測試以下各項中的一個或複數的性能:(1)基於360度視訊(例如,全向視訊)的系統;(2)基於多視圖的系統。
VR系統可以包括處理鏈。該處理鏈可以是或可以包括捕獲、處理、顯示及/或應用。關於捕獲,VR系統可以使用一個或複數相機來捕獲來自不同發散視圖(例如,6到12個視圖)的場景。這些視圖可以被拼接在一起以形成高解析度(例如,4K或8K)的360度視訊。在用戶端側及/或使用者側,VR系統可以包括計算平臺、頭戴式顯示器(HMD)及/或一個或複數頭部跟蹤感測器。該計算平臺可以接收及/或解碼360度視訊,及/或產生用於顯示的視埠。可以為視埠渲染兩個圖片,每隻眼睛一個圖片。這兩個圖片可以在HMD中顯示(例如,用於立體觀看)。透鏡可以用於放大HMD中顯示的影像以便更好地觀看。該頭部跟蹤感測器可以保持(例如,恆定地保持)對觀看者的頭部定向的跟蹤,及/或可以將定向資訊饋送至系統以顯示針對該定向的視埠圖片。
VR系統可以提供觸控裝置以供觀看者與虛擬世界中的物件交互作用。VR系統可以由具有GPU支援的工作站驅動。VR系統可以使用智慧型電話作為計算平臺、HMD顯示器及/或頭部跟蹤感測器。空間HMD解析度可以是2160x1200,刷新率可以是90Hz,及/或視場(FOV)可以是110度。頭部跟蹤感測器的取樣密度可以是1000Hz,其可以捕獲快速移動。VR系統可以包括透鏡及/或卡板,及/或可以由智慧型電話驅動。
例如,可以使用基於HTTP上動態調適資料流(DASH)的視訊資料流技術來壓縮及/或傳送360度視訊。例如,可以藉由使用球面幾何結構來表示360度資訊,從而實現360度視訊傳送。例如,由複數相機捕獲的同步的複數視圖可以被拼接在球體上(例如,作為整體結構)。該球體資訊可以經由幾何結構轉換(例如,等矩形投影及/或立方圖投影)而被投影到2D平面表面上。
可以執行等矩形投影。圖1A示出了在經度(φ)和緯度(θ)的範例球體取樣。圖1B示出了使用等矩形投影(ERP)而被投影到2D平面上的範例球體。範圍[-π,π]中的經度φ可以被稱為偏航,並且範圍[-π/2,π/2]中的緯度θ可以被稱為航空中的俯仰。π可以是圓的周長與其直徑的比率。座標(x,y,z)可以表示3D空間中的點的座標。座標(ue,ve)可以表示ERP之後2D平面中的點的座標。ERP可以用數學方法表示,例如,如(1)和(2)所示。
ue=(Φ/(2 * π)+0.5) * W (1)
ve=(0.5-θ/π) * H (2)W和H可以是2D平面圖片的寬度和高度。如圖1A所示,點P(即,球體上經度L4和緯度A1之間的交叉點)可以使用(1)及/或(2)而被映射到2D平面中圖1B中的唯一點q。圖1B中所示的2D平面中的點q可以例如經由反投影被投影
回圖1A中所示的球體上的點P。圖1B中的視場(FOV)示出了一個範例,其中球體中的FOV被映射到2D平面,其中沿著X軸的視角大約為110度。
一個或複數360度視訊可以被映射到2D視訊。所映射的視訊可以使用視訊編解碼器(例如,H.264及/或HEVC等)來編碼及/或可以被遞送到用戶端。在用戶端側,可以基於使用者的視埠(例如,藉由將在等矩形圖片中屬於FOV的部分投影及/或顯示到HMD上)來解碼及/或渲染等矩形視訊。球面視訊可被變換成2D平面圖片以供用ERP編碼。等矩形2D圖片的特性可以與非等矩形2D圖片(例如,直線視訊)不同。可以拉伸可以對應於北極的圖片的頂部部分和可以對應於南極的圖片的底部部分(例如,當與可以對應於中緯線的圖片的中間部分相比時)。該拉伸可以指示2D空間域中的等矩形取樣可能是不均勻的。2D等矩形圖片中的運動場沿時間方向可能是很複雜的。
ERP圖片的左邊界及/或右邊界可以被寫碼(例如,獨立地寫碼)。例如,當重建視訊被用於渲染視埠(該視埠經由HMD或2D螢幕而被顯示示給使用者)時,可能會在該重建視訊中產生面接縫形式的令人反感的視覺偽像。N(例如,8)個亮度樣本的填充可應用於圖片的左側及/或右側。可以對包括填充樣本的經填充的ERP圖片進行編碼。具有填充的重建ERP可以被轉換回。例如,可以(例如,在解碼之後)藉由混合所複製的樣本及/或裁剪所填充的區域來將該具有填充的重建ERP轉換回去。
朗伯(Lambert)圓柱形等面積投影(EAP)可以使用與ERP同樣的經度取樣。朗伯圓柱形EAP可以藉由降低垂直取樣密度來補償極點附近增加的水平取樣密度。在EAP中,該垂直取樣密度可以被設置為cos(φ),並且組合的取樣密度可以在整個球體上是恆定的。調整後的等面積投影(AEP)可以
是EAP的一般化。AEP可以引入一參數,其可以控制投影中的線重新取樣速率。
可以執行立方圖投影。可以拉伸分別對應於北極和南極的ERP圖片的頂部和底部(例如,當與圖片的中間部分相比時)。這可以指示該圖片的球面取樣密度可能是不均勻的。可描述相鄰ERP圖片之間的時間相關性的運動場可變得很複雜。某些視訊編解碼器(例如,MPEG-2、H.264及/或HEVC)可使用平移模型來描述該運動場,且可能不能夠表示平面ERP圖片中的形狀變化的移動。
幾何投影格式可以用於將360度視訊映射到複數面上。例如,可以使用立方圖投影(CMP)。圖2A示出了範例CMP幾何結構。如圖2A所示,該CMP可以包括六個正方形面,其可以被標記為PX、PY、PZ、NX、NY及/或NZ。P可以代表正,而N可以代表負。X、Y和Z可以指軸線。這些面可以用數字0-5標記。例如,這些面可以被標記為PX(0)、NX(1)、PY(2)、NY(3)、PZ(4)、NZ(5)。如果正切球體的半徑是1,則每個面的橫向長度可以是2。CMP格式的六個面可以被封裝在一起(例如,訊框封裝在一起)成為圖片(例如,單個圖片)。可以將面旋轉一角度(例如,某角度),這可以影響(例如,最大化影響)相鄰面之間的連續性。圖2B示出了將六個面佈置入矩形圖片的範例性封裝。面索引可以被置於與該面的相應旋轉對準的方向。例如,面#3和#1可以被分別逆時針旋轉180和270度。其它面可以不旋轉。在範例中,訊框封裝方法可以包括3×2佈局(例如,如圖2B所示)。如圖2B所示,3個面的頂列可以是3D幾何結構中的空間相鄰面,並且可以具有連續紋理。如圖2B所示,3個面的底列可以是3D幾何結構中的空間相鄰面,並且可以具有連續紋理。頂面列和底面列在3D幾何結構中可以不是空間連續的,並且該兩個面行之間可以存著接縫,例如不連續的邊界。
在CMP中,如果在面的中心處的取樣密度為1,則該取樣密度可以定向邊緣增加。當與中心處的紋理相比時,邊緣周圍的紋理可以被拉伸。基於立方圖的投影(例如,等角立方圖投影(EAC)、經調整的立方圖投影(ACP)及/或類似投影)可以使用非線性扭撓函數在垂直及/或水平方向上調整面(例如,每個面)。例如,在EAC中,可以使用正切函數來執行調整。在ACP中,可以使用二階多項式函數來執行調整。
可以執行混合立方圖投影(HCP)。在HCP中,調整函數及其參數可以針對面及/或方向而被個別地調諧。基於立方圖的投影格式可以包括混合等角立方圖投影格式(HEC)。可以封裝基於立方的投影。例如,基於立方的投影可以類似於CMP而被被封裝。在基於立方的投影中,在訊框封裝的圖片內可能出現面不連續性。
可執行用於360度視訊寫碼的幾何結構填充。
視訊編解碼器可以考慮在平面上捕獲的2D視訊。如果運動補償預測使用參考圖片邊界之外的樣本,則可以藉由從該圖片邊界複製一個或複數樣本值來執行填充。這種類型的填充可以被稱為重複填充。圖3A和圖3B分別示出了使用重複填充用於ERP和CMP來擴展原始圖片(例如,由虛線框所界定的圖片)的範例。
360度視訊可以包含球體(例如,整個球體)上的視訊資訊,及/或可以具有循環屬性。360度視訊的參考圖片可以不具有邊界。例如,360度視訊的參考圖片可以環繞該球體(例如,並且可以不具有邊界)。當在2D平面上表示360度視訊時,該循環屬性可以存在。該循環屬性可以存在,而不管使用哪種投影格式及/或哪種訊框封裝實施。可藉由考慮3D幾何結構來填充樣本而針對360度視訊寫碼執行幾何結構填充。
可以執行用於ERP的幾何結構填充。ERP可以在具有經度和緯度的球體上被定義。給定要被填充的點(u,v)(例如,在ERP圖片之外),點(u',v')可以用於導出填充樣本。這可以藉由以下步驟確定:


圖4A示出了ERP的幾何結構填充的範例。填充可以在圖片的左邊界之外執行。例如,如圖4A中所見,位於圖片的左邊界之外的樣本A、B和C可以用可位於該圖片的右邊界之內的樣本A'、B'和C'來填充。填充可以在圖片的右邊界之外執行。舉例來說,如圖4A中所見,樣本D、E和F可用樣本D'、E'和F'填充,該樣本D'、E'和F'可位於圖片的左邊界內部。填充可以在圖片的頂部邊界之外執行。例如,如圖4A中所見,樣本G、H、I和J可以用樣本G'、H'、I'和J'填充,樣本G'、H'、I'和J'可以位於圖片的頂部邊界內且具有一半寬度的偏移。填充可以在圖片的底部邊界之外執行。例如,如圖4A中所見,樣本K、L、M和N可以用樣本K'、L'、M'和N'填充,樣本K'、L'、M'和N'可以位於圖片的底部邊界內且具有一半寬度的偏移。圖4B示出了使用幾何結構填充的擴展的ERP圖片的範例。如圖4B中所見,幾何結構填充可為ERP圖片的邊界之外的區域提供相鄰樣本之間的連續性。可以簡化用於ERP的幾何結構填充。例如,可以使用幾何結構填充來填充圖片的左邊界及/或右邊界,並且可以使用重複填充來填充圖片的頂部邊界和底部邊界。對圖片的左及/或右邊界進行幾何結構填充以及對圖片的頂部和底部邊界進行重複填充可能是合乎需要的,例如,因為與諸如頂部和底部
邊界的極點區相比,中緯線周圍的區域(諸如,左邊界及/或右邊界)可能包括更有趣的視訊內容及/或可能被使用者更頻繁地觀看。
當經寫碼的圖片為CMP格式時,可使用幾何結構填充來填充CMP的一或複數面。圖5A示出了在3D幾何結構中的給定面上執行的幾何結構填充的範例。如圖5A所示,點P可以在面F1上,並且可以在面F1的邊界之外。點P可以被填充。如圖5A所示,點O可以在球體的中心。如圖5A所示,R可以是左邊界點,其可以最靠近P和位於面F1內側。如圖5A所示,點Q可以是點P從中心點O在面F2上的投影點。幾何結構填充可以使用點Q處的樣本值充填(fill)點P處的樣本值來執行。圖5B示出了使用針對CMP 3x2圖片的幾何結構填充的擴展的面的範例。如圖5B所示,可以個別地在每個面上執行填充。幾何結構填充可以為CMP面的邊界之外的區域提供樣本。
可以執行混合視訊編碼。圖6中示出了範例性360度視訊傳送實施方式。如圖6所示,範例性360度視訊傳送實施方式可以包括360度視訊捕捉,其可以使用複數相機來捕捉覆蓋球體空間(例如,整個球體空間)的視訊。該視訊可以以原生(native)幾何結構被拼接在一起。例如,該視訊可以按照ERP格式而被拼接在一起。可以例如基於視訊編解碼器將該原生幾何結構轉換為一個或複數投影格式以用於編碼。在接收器處,可對該視訊進行解碼,及/或可將解壓縮的視訊轉換為幾何結構以供顯示。該視訊可以用於根據使用者的視角經由視埠投影進行渲染。
圖7示出了範例的基於塊的混合視訊編碼系統600。輸入視訊訊號602可以被逐塊處理。擴展的塊大小(例如,稱為寫碼單元(CU))可以用於(例如,在HEVC中用於)壓縮高解析度(例如,1080p及/或以上)視訊訊號。CU可具有高達64x64像素(例如,在HEVC中)。CU可被分割成預測單元(PU),可對該PU應用各別的預測。對於輸入視訊塊(例如,巨集塊(MB)或CU),可
執行空間預測660或運動預測662。空間預測(例如,或訊框內預測)可使用來自同一視訊圖片及/或截割中的已寫碼相鄰塊的像素來預測目前視訊塊。空間預測可以減少該視訊訊號中固有的空間冗餘。運動預測(例如,稱為訊框間預測或時間預測)可使用來自已寫碼視訊圖片的像素來預測目前視訊塊。運動預測可以減少該視訊訊號中固有的時間冗餘。可藉由指示目前塊與其參考塊之間的運動的量及/或方向的運動向量來用信號發送針對給定視訊塊的運動預測信號。如果支援複數參考圖片(例如,在H.264/AVC、HEVC及/或其類似者中),那麼可將視訊塊的參考圖片索引用信號發送到解碼器。該參考索引可以用於識別時間預測信號可以來自參考圖片儲存664中的哪個參考圖片。
在空間及/或運動預測之後,編碼器中的模式決定680可例如基於速率失真最佳化來選擇預測模式。在616處可從目前視訊塊減去預測塊。預測殘差可以使用變換模組604和量化模組606去相關,以實現目標位元速率。量化的殘差係數可以在610被逆量化並且在612被逆變換以形成重建的殘差。在626,可以將該重建的殘差加回到預測塊,以形成重建的視訊塊。可在666處將環路內濾波器(例如,解塊濾波器及/或調適環路濾波器)應用於該重建的視訊塊(在將其放入參考圖片儲存664中之前)。該參考圖片儲存664中的參考圖片可用於對未來視訊塊進行寫碼。可以形成輸出視訊位元串流620。寫碼模式(例如,訊框間或訊框內寫碼模式)、預測模式資訊、運動資訊及/或經量化的殘餘係數可被發送到熵寫碼單元608以被壓縮和封裝以形成位元串流620。
圖8說明範例基於塊的視訊解碼器。視訊位元串流202可以在熵解碼單元208處被接收、解封裝及/或熵解碼。寫碼模式及/或預測資訊可被發送到空間預測單元260(例如,如果經訊框內寫碼)及/或發送到諸如時間預
測單元的運動補償預測單元262(例如,如果經訊框間寫碼)。預測塊可由空間預測單元260及/或運動補償預測單元262(例如時間預測單元)形成。殘餘變換係數可被發送到逆量化單元210及逆變換單元212以重建殘餘塊。預測塊及殘餘塊可在226處被相加。重建塊可經過環路濾波器266(例如環路內濾波),並可被儲存在參考圖片儲存264中。該參考圖片儲存264中的重建視訊可用於驅動顯示裝置及/或預測未來視訊塊。
諸如H.264及/或HEVC的視訊編解碼器可以用於對2D平面直線視訊進行寫碼。寫碼解碼可利用空間及/或時間相關性,例如以移除資訊冗餘。可在寫碼解碼期間應用例如訊框內預測及/或訊框間預測之一個或一個以上預測技術。訊框內預測可以利用其相鄰的重建樣本來預測樣本值。圖9展示了可用於對目前變換單元(TU)進行訊框內預測的範例參考樣本。該參考樣本可以是或可以包括位於該目前TU上方及/或左側的重建樣本。該參考樣本可以是或可以包括來自左側及/或頂部的相鄰重建樣本。
圖10說明了HEVC中的訊框內預測方向的範例指示。例如,HEVC可以指定35個訊框內預測模式,這其中包括平面(0)、DC(1)及/或角度預測(2~34),如圖10所示,可以選擇適當的訊框內預測模式。例如,可以在編碼器側選擇適當的訊框內預測模式。可以比較由複數候選訊框內預測模式產生的預測。可選擇產生預測樣本與原始樣本之間的最小失真的候選訊框內預測模式。可將所選的訊框內預測模式寫碼入位元串流。
角度預測可以用於預測定向紋理。圖11示出了利用運動向量(MV)的範例訊框間預測。參考圖片中的塊B0'和B1'可為目前圖片的塊B0和B1的分別參考塊。參考塊B0'可以部分在該參考圖片的邊界之外。填充可用於充填圖片邊界之外的未知樣本。圖12示出了用於圖片邊界之外的參考樣本的範例填充。例如,用於塊B0'的填充範例可以具有四個部分P0、P1、P2和P3。
部分P0、P1和P2可以在圖片邊界之外,並且可以例如經由填充而被充填。部分P0可以用參考圖片的左上樣本來充填。部分P1可使用參考圖片的最頂列藉由垂直填充來充填。部分P2可使用該圖片的最左行藉由水平填充來充填。
合併模式可使用(例如,再使用)空間及/或時間相鄰PU的MV資訊。PU(例如,目前PU)的運動向量可不經寫碼。編碼器及/或解碼器可形成運動向量合併候選者列表。例如,可使用空間及/或時間相鄰PU的MV資訊來創建該清單。圖13示出了用於合併候選者導出的空間相鄰者(例如,左下、右上、上及/或左上)的範例。可寫碼及/或用信號發送所選的合併候選者索引。合併候選者列表可由解碼器構造。該解碼器所進行的列表構造可以類似於(例如,相同於)編碼器所進行的清單構造。用信號發送的合併候選者索引的條目可用作PU(例如,目前PU)的MV。
可以實施用於360度視訊寫碼的幾何結構填充。例如,可以基於2D到3D和3D到2D映射函數來實施用於360度視訊寫碼的幾何結構填充。該2D到3D和3D到2D映射函數可以使用除法及/或三角函數,例如正弦、餘弦、正切及/或類似函數。幾何結構填充的實施可以利用計算資源,諸如CPU及/或記憶體。該幾何結構填充可以是硬體實施的。可以實施具有恆定分母的除法。例如,可以使用位元移位操作來實施具有恆定分母的除法。具有可變分母的除法可能難以實施。可以使用查閱資料表(LUT)來實現一個或複數功能。LUT可能不可用於解碼平臺。編碼器及/或解碼器可以將該LUT儲存在記憶體中。
可以藉由創建參考圖片來實施幾何結構填充。參考圖片中的複數樣本可被預填充在圖片邊界周圍。可以不使用一個或複數預填充的樣本。舉例來說,當位元串流中沒有運動向量參考經填充的樣本時,可省略一或
複數經預填充的樣本且可不使用該一或複數經預填充的樣本。可以儲存參考圖片及/或經預填充的樣本。例如,該參考圖片及/或經預填充的樣本可被儲存在記憶體中。
在範例中,例如,如本文所描述的,幾何結構填充可以基於在獲取球面相鄰者時導出一個或複數樣本來實施。例如,當使用水平幾何結構填充時,一個或複數樣本可以從基於單個面的投影幾何結構導出,諸如ERP、EAP、AEP及/或類似格式。裁剪操作可用於約束經解碼的圖片內的樣本。
在範例中,塊可以被劃分成一個或複數子塊。例如,可以基於塊的運動向量而將該塊劃分成一個或複數子塊。可以取得從投影視訊的不同部分對子塊的預測。例如,如果運動向量取ERP圖片的左邊緣之外的塊的左部分,則該塊可以被劃分成複數部分,諸如兩個部分。該複數部分可以在該ERP圖片的邊緣的內側或/和外側。可以從ERP圖片的右側取出位於左邊緣外側的部分,並且可以從ERP圖片的左側提取該左邊緣內側的部分。
一種視訊寫碼裝置可執行幾何結構填充。本文描述的視訊寫碼裝置可為或可包含編碼器及/或解碼器。舉例來說,視訊寫碼裝置可基於在獲取一或複數球面相鄰者時導出一或複數樣本而執行幾何結構填充。
可以用信號發送一指示以賦能幾何結構填充,諸如水平幾何結構填充。例如,可以用信號發送一環繞賦能指示以指示賦能幾何結構填充。該環繞賦能指示可指示是否賦能水平環繞運動補償。該環繞賦能指示可為或可包含環繞賦能標誌,該環繞賦能標誌可指示是否賦能該水平環繞運動補償。可在位元串流中用信號發送例如環繞賦能指示的指示。
可以確定一個或複數球面相鄰者的正確位置。舉例來說,該視訊寫碼裝置可基於目前樣本的參考樣本環繞偏移,確定與該目前樣本相關聯
的一或複數球面相鄰者的正確位置。該視訊寫碼裝置可經由幾何結構填充來應付該偏移,例如參考樣本環繞偏移,且可計算該一或複數球面相鄰者的正確位置。例如,該參考樣本環繞偏移可以是或可以包括指示該圖片(諸如,與視訊內容相關聯的訊框封裝圖片)的面寬度的資訊。該視訊寫碼裝置可基於指示該訊框封裝圖片的面寬度的大小指示來計算一或複數球面相鄰者的正確位置。該大小指示可以是或可以包括保護帶大小,諸如亮度樣本中的保護帶的寬度。基於可為或可包含該保護帶大小的寬度的該大小指示,該視訊寫碼裝置可計算與該目前樣本相關聯的一或複數球面相鄰者的正確位置。當在圖片內對一個或複數面進行封裝時,可以添加(例如,可以已經添加)該保護帶的位置及/或大小。當在圖片(例如,該訊框封裝的圖片)中封裝一個或複數面時,可能已經添加了保護帶。例如,當在編碼之前在圖片內封裝一個或複數面時,可能已經添加了該保護帶。如本文所述,可以用信號發送與幾何結構填充有關的一個或複數指示,以指示是否應用了諸如水平幾何結構填充之類的幾何結構填充及/或指示保護帶。
對於包括面的投影幾何結構,諸如像ERP、EAP、AEP及/或類似投影格式的單面投影格式,可以在水平方向上執行幾何結構填充。當在水平方向上執行幾何結構填充時,可以在垂直方向上使用重複填充。樣本位置可以被確定,因為水平樣本座標可以在寫碼的圖片內被回繞(例如,參見公式(3))。垂直樣本座標可以例如在重複填充中被裁剪至一個或複數寫碼圖片邊界。可以描述用於基於面(例如,單個面)的投影幾何結構的訊框間預測(例如,使用水平幾何結構填充)的整數樣本導出過程及/或分數樣本內插過程。
可以用信號發送與幾何結構填充有關的一個或複數指示。如本文所述,可用信號發送環繞賦能指示。該環繞賦能指示可指示是否賦能水平
環繞運動補償。可在序列及/或圖片層級處用信號發送該環繞賦能指示。例如,指示幾何結構填充的環繞賦能指示可在諸如序列參數集(SPS)的序列級上被用信號發送。
可在位元串流中用信號發送一個或一個以上訊框封裝參數。例如,可以使用高級語法(HLS)元素在序列及/或圖片級用信號發送一個或複數訊框封裝參數。可以在位元串流中用信號發送訊框封裝圖片的面的位置及/或定向。可以在位元串流中用信號發送指示與訊框封裝圖片相關聯的面寬度的指示。可以在位元串流中用信號發送針對一個或複數偏移的指示,例如指示保護帶的寬度的大小指示及/或一個或複數保護帶的存在。例如,可以在位元串流中用信號發送用於面邊緣處的一個或複數像素(例如,附加像素)的保護帶的存在及/或大小指示。該保護帶的位置(諸如,該偏移)可以基於投影格式。例如,對於基於單個面的投影幾何結構,保護帶可以位於左面邊界及/或右面邊界處。在範例中,位於左面邊界和右面邊界處的保護帶的大小可以相同。在範例中,位於左面邊界和右面邊界處的保護帶的大小可以不同。指示保護帶寬度的該大小指示可以包括該保護帶的寬度,例如左保護帶和右保護帶的寬度。對於基於多面的投影格式,例如CMP格式,該保護帶可以位於一組連續面及/或面列周圍。如果在基於複數面的投影格式中保護帶的大小不同,則該大小指示可以包括每個保護帶的寬度。
可以用信號發送本文描述的一個或複數保護帶及/或幾何結構填充語法元素。舉例來說,可用信號發送環繞賦能指示以指示是否賦能水平環繞運動補償。該指示可以是或可以包括環繞賦能標誌。該指示可以包括指示訊框封裝圖片的面寬度的大小指示可被用信號發送。如本文所述,該大小指示(例如,指示面寬度)可以是或可以包括指示該保護帶的寬度的參數,諸如guard_bands_param_present_flag。表1示出了幾何結構填充和保護帶語
法元素的範例。該幾何結構填充及/或保護帶語法元素可以在序列級及/或圖片級被用信號發送。

在範例中,表1的參數可以具有以下語義。
語法元素projection_geometry可以是或可以包括所使用的投影幾何結構的映射索引(例如,在表2中示出)。
語法元素guard_bands_param_present_flag可以指示是否存在語法元素guard_bands_size_in_luma_samples。如果不存在語法元素guard_bands_size_in_luma_samples,則可推斷語法元素guard_bands_param_present_flag的值等於0。
偏移存在指示(例如,指示是否存在偏移的指示)可以包括關於偏移的資訊。例如,該偏移存在指示(諸如,guard_bands_param_present_flag)可用於確定位元串流中是否存在偏移。如果該偏移存在指示指示了該位元串流中存在該偏移,那麼例如解碼器等視訊寫碼裝置可解析該位元串流以接收該偏移。如果該偏移存在指示指示了該偏移不存在於該位元串流中,那麼視訊寫碼裝置可跳過解析該位元串流以接收該偏移。舉例來說,如果該偏移存在指示(例如,guard_bands_param_presnt_flag)指示不存在該偏移,那麼視訊寫碼裝置可跳過使用該保護帶。所投影的面的最左邊邊界和最右邊邊界可以在球體中相連接,並且這些邊界可以不在訊框封裝圖片中連
接。可在該位元串流中對該保護帶中的充填/擴展樣本進行寫碼。例如,左保護帶資訊可以來自該面內的最右區段,並且右保護帶資訊可以來自該面內的最左區段。在最左邊界和最右邊界處的重建樣本可以是連續的(例如,當在寫碼中將最左邊界和最右邊界處的重建樣本視為相鄰樣本時)。該保護帶中的樣本可以在渲染中被丟棄(例如,因為這些樣本在實體上不存在)。
可以接收指示圖片(例如,訊框封裝圖片)的面寬度的大小指示。舉例來說,該大小指示可包含語法元素,例如guard_bands_size_in_luma_samples。可以基於該大小指示來計算該訊框封裝圖片的面寬度。所計算的面寬度可以用作參考樣本環繞偏移。例如,語法元素guard_bands_size_in_luma_samples可以表示在訊框封裝圖片中使用的保護帶的一個或複數亮度樣本中的大小。可以針對投影格式定義保護帶的位置(例如,偏移)。例如,對於諸如ERP、EAP、AEP及/或類似格式的基於單個面的投影幾何結構,可以在左及/或右面邊界處定義一個或複數保護帶。在範例中,左面邊界和右面邊界處的保護帶可以具有相同的寬度。在範例中,該左面邊界和右面邊界處的保護帶可以具有不同的寬度。對於基於多面的投影幾何結構,例如CMP格式,可以在一組面(例如,每組連續面或每個面列)周圍定義一個或複數保護帶。語法元素guard_bands_size_in_luma_samples可以不等於0。語法元素guard_bands_size_in_luma_samples可以是MinCbSizeY的整數倍。
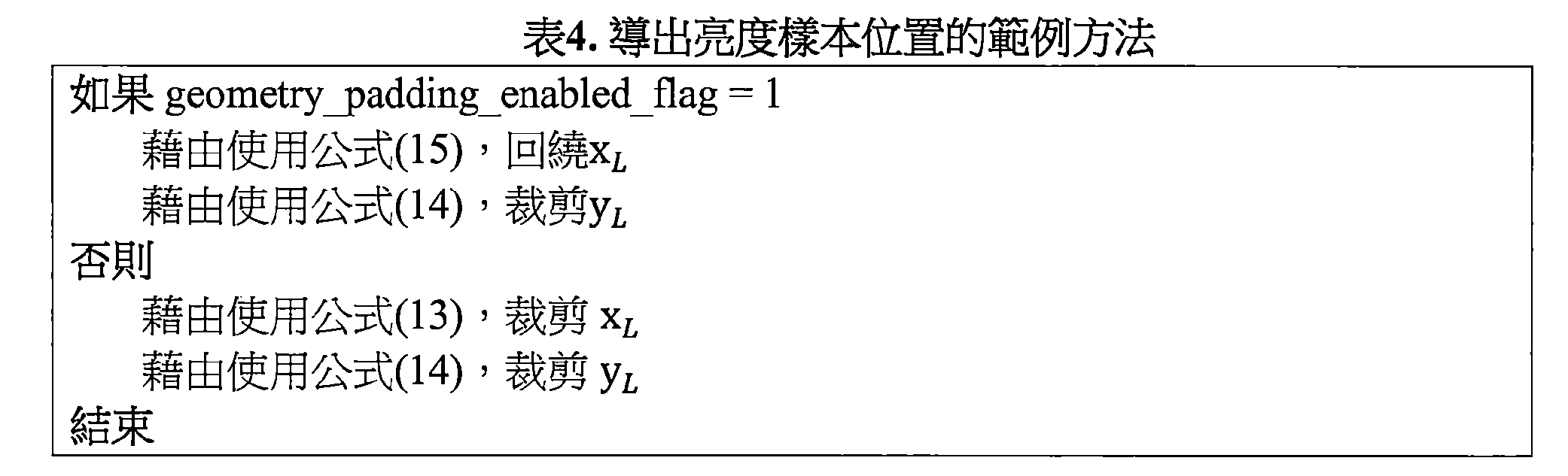
如果語法元素geometry_padding_enabled_flag等於1,則該語法元素geometry_padding_enabled_flag可指示參考圖片的幾何結構填充被應用於位於圖片邊界之外的一個或複數樣本。如果語法元素geometry_padding_enabled_flag等於0,則該語法元素geometry_padding_enabled_flag可指示跳過(例如,不應用)該幾何結構填
充。如果不存在語法元素geometry_padding_enabled_flag,則可推斷語法元素geometry_padding_enabled_flag的值等於0。
表2示出了範例投影幾何結構索引。

可以從在表1中用信號發送的資訊及/或寫碼圖片大小來計算面的實際大小,諸如沒有保護帶的面寬度。例如,對於諸如ERP、EAP、AEP及/或類似格式的基於單個面的投影幾何結構,在寫碼圖片的左側及/或右側具有保護帶,可以例如使用公式(6)來計算該實際面寬度。指示訊框封裝圖片的面寬度的參數(例如,該大小指示)可以是或可以包括如本文所述的pic_width_in_luma_samples。該大小指示或例如pic_width_in_luma_samples等的該參數可表示以亮度樣本為單位的經解碼圖片的寬度。參數pic_width_in_luma_samples可以在序列級被用信號發送。例如,在頂側及/或底側上不存在保護帶的情況下,可以從寫碼圖片高度推斷面高度。
face_width_in_luma_samples=pic_width_in_luma_samples-2 * guard_bands_size_in_luma_samples (6)
在範例中,左保護帶和右保護帶可以具有相同的大小。在範例中,左保護帶和右保護帶可以具有不同的大小。如果左保護帶和右保護帶具有
不同的大小,則可以例如根據表3來用信號發送保護帶的大小(例如,個別的大小)。表3示出了範例性幾何結構填充和保護帶語法。

語法元素guard_bands_param_present_flag可表示是否存在語法元素left_guard_band_width_in_luma_samples、right_guard_band_width_in_luma_samples或guard_bands_size_in_luma_samples中的至少一個。如果不存在諸如left_guard_band_width_in_luma_samples、right_guard_band_width_in_luma_samples或guard_band_size_in_luma_samples之類的語法元素中的至少一個,則可以推斷語法元素guard_bands_param_present_flag的值等於0。
語法元素left_guard_band_width_in_luma_samples可以表示在與基於單個面的投影相關聯的圖片(例如,ERP、EAP及/或AEP圖片)的左面邊界
處的訊框封裝圖片中使用的保護帶的亮度樣本的寬度。該語法元素left_guard_band_width_in_luma_samples可以是MinCbSizeY的整數倍。
語法元素right_guard_band_width_in_luma_samples可以表示在與基於單個面的投影相關聯的圖片(例如,ERP、EAP及/或AEP圖片)的右面邊界處的訊框封裝圖片中使用的保護帶的亮度樣本中的寬度。語法元素right_guard_band_width_in_luma_samples可以是MinCbSizeY的整數倍。
如本文所述,可以基於指示訊框封裝圖片的面寬度的大小指示(諸如left_guard_band_width_in_luma_samples及/或right_guard_band_width_in_luma_samples)來計算訊框封裝圖片的面寬度。例如,藉由使用這裡描述的表示,可以例如基於使用公式(7)來計算面寬度。
face_width_in_luma_samples=pic_width_in_luma_samples-(left_guard_band_width_in_luma_samples+right_guard_band_width_in_luma_samples) (7)
在範例中,保護帶寬度的值可以是MinCbSizeY的倍數。如果保護帶寬度的值是MinCbSizeY的倍數,則可以MinCbSizeY為單位指定語法元素,例如,除了或還有以亮度樣本為單位。
可以基於一個或複數樣本對基於單個面的投影幾何結構進行幾何結構填充。在訊框間預測中,可從參考圖片中的參考塊預測目前圖片中的目前塊。例如,可使用與從目前塊位置到參考塊位置的轉換對應的MV從參考圖片中的參考塊預測目前圖片中的目前塊。對於目前塊內的樣本位置(x,y),例如藉由使用公式(8),可以從參考圖片Iref和MV(△x,△y)獲得預測信號Ipred(x,y)。
I pred (x,y)=I ref (x+△x,y+△y) (8)
MV可使用分數精度p。例如,該MV可使用1/2、1/4、1/8或1/16像素精度。該分數精度可以使用從一個或複數可用的整數樣本位置的內插。參考圖片中的樣本位置可例如使用公式(9)-(12)而被表示為整數部分和小數部分。s=-log 2(p),>>和<<可以分別表示算術右移和左移。&可以表示逐位元“與”運算子。
x Int =x+(△x≫s) (9)
x Frac =△x & [(1≪s)-1] (10)
y Int =y+(△y≫s) (11)
y Frac =△y & [(1≪s)-1] (12)
預測信號可以藉由在整數位置處內插一個或複數相鄰樣本來獲得。可獲得該預測信號以確定分數位置處的值。如果整數位置(x Int ,y Int )處的樣本在參考圖片邊界之外,例如在訊框封裝圖片之外,那麼可使用裁剪來將樣本位置約束為在經寫碼的圖片邊界內。這可以類似於(例如,等效於)執行重複填充。對於亮度樣本,可(例如)分別使用公式(13)和(14)來裁剪xInt和yInt座標。


舉例來說,如果該環繞賦能指示水平環繞運動補償被停用,那麼可執行裁剪及/或重複填充。可以識別訊框封裝圖片中的目前樣本位置。視訊寫碼裝置可確定該目前樣本位置是否位於訊框封裝圖片的水平邊界處。視訊寫碼裝置可確定該參考樣本位置是否位於訊框封裝圖片的水平邊界之外。可識別訊框封裝圖片的水平邊界上的參考樣本位置。例如,如本文所述,可以基於裁剪來識別訊框封裝圖片的水平邊界上的參考樣本位置。可以基於參考樣本位置來預測目前樣本。
對於亮度分量,當使用水平幾何結構填充時,可例如使用公式(15)將x Int 座標回繞到經寫碼的圖片,以考慮360度視訊的循環屬性,公式(15)中,W L =pic_width_in_luma_samples,F L =face_width_in_luma_samples,且 。如本文所述,諸如環繞賦能指示之類的指示可以提供使用水平幾何結構填充的資訊。
。如本文所述,諸如環繞賦能指示之類的指示可以提供使用水平幾何結構填充的資訊。

如本文所描述,該視訊寫碼裝置可確定原始參考樣本位置(例如,原參考樣本位置)是否在訊框封裝圖片之外。如果原始參考樣本位置在訊框封裝圖片之外,則可以藉由將參考樣本環繞偏移應用於與該原始參考樣本位置相關聯的水平樣本座標來計算參考樣本位置。
在範例中,該訊框封裝圖片的面寬度可以基於參考樣本環繞偏移來確定。可以在訊框封裝圖片中識別目前樣本位置。視訊寫碼裝置可確定原始參考樣本位置(例如,原參考樣本位置)是否在訊框封裝圖片之外。如果原始參考樣本位置在訊框封裝圖片的最左水平邊界之外,那麼可藉由將參考樣本環繞偏移添加到與原始參考樣本位置相關聯的水平樣本座標(例如,x Int 座標)來確定參考樣本位置(例如,如公式15中所示)。如果原始參考
樣本位置在訊框封裝圖片的最右水平邊界之外,那麼可藉由從與原始參考樣本位置相關聯的水平樣本座標減去參考樣本環繞偏移來確定參考樣本位置(例如,如公式15中所示)。
對於基於單個面的投影幾何結構(例如,ERP、EAP、AEP及/或類似格式),可以導出亮度樣本位置,例如,如表4所示。表4說明了導出亮度樣本位置的範例方法。例如,表4示出了用於訊框間預測的整數樣本推導過程及/或分數樣本內插過程的範例。
對於一個或一個以上色度樣本,當使用重複填充時,可(例如)藉由分別使用公式(16)和(17)來裁剪x Int 和y Int 座標。


對於色度分量,當使用水平幾何結構填充時,可例如藉由使用公式(18)來將x Int 座標回繞到經寫碼的圖片,以考慮360度視訊的循環屬性,公式(18)中,W C =pic_width_in_luma_samples/SubWidthC且F C =face_width_in_luma_samples/SubWidthC。

對於基於單個面的投影幾何結構(例如,ERP、EAP、AEP及/或類似格式),可以導出色度樣本位置,例如,如表5所示。表5示出了導出色度樣本位置的範例方法。例如,表5示出了用於訊框間預測的整數樣本推導過程及/或分數樣本內插過程(fractional sample interpolation process)的範例。

如果用於表示該360度視訊的投影格式是單面投影格式(例如,ERP、EAP、AEP及/或類似投影格式),則本文中使用模操作描述的樣本位置的環繞可以應用於水平幾何結構填充。對於其它投影格式,諸如多面投影格式(例如,CMP及/或基於CMP的投影格式),可以實施2D到3D和3D到2D映射函數。這裡描述的模操作(modulo operarion)可以作為近似而被應用於該多面投影格式(例如,CMP及/或基於CMP的投影格式)。
視訊寫碼裝置可針對該目前CU內的樣本位置確定一位置及/或可在樣本級別執行運動補償。對於標準動態範圍(SDR)視訊及/或類似者,可在塊級別(例如,塊可為CU或子CU)執行運動補償。該CU可被劃分成複數部分(例如,兩個部分)且/或可針對該複數部分(例如,兩個部分)中的每一者使用幾何結構填充來執行運動補償。
圖14示出了當使用水平幾何結構填充時用於訊框間預測的重建樣本的範例快取。在訊框間預測中,可不止一次存取參考圖片中的樣本,因為相同區域可由若干塊、內插過程及/或細化過程參考。當存取解碼圖片緩衝器時,參考圖片的一部分可以被快取在記憶體(例如,本地記憶體)中,以便在執行訊框間預測時進行快速讀取存取,如圖14所示。快取區域可以是以目前塊位置及/或目前CTU位置為中心的鄰域。快取區域的大小可能是有限的。如果使用幾何結構填充並且目前塊在第一面的第一面邊界處及/或附近,則該快取區域可以被劃分成兩個子區域:第一子區域,其位於第一面中的目前塊位置周圍;以及第二子區域,其位於第一面邊界的另一側上,例如,在與第一面相鄰的第二面上。例如,考慮如圖12所示的ERP圖片,在參考圖片中,所快取的資料可以包括兩個子區域:位於目前塊位置周圍的第一區域(例如,用於預測圖12中的兩個子部分P1和P3區段);以及對應於所環繞的資料的第二區域(例如,用於預測圖12中的兩個子部分P0和P2區段),例如,其考慮了360度視訊的循環屬性。
為了預測對應於圖12所示的P1和P3區段的部分,一個或複數預測樣本可以來自圖片的左側。如果運動向量具有分數樣本精度,則可以實施內插及/或可以調整來自圖片右側的相鄰者(例如,與圖12所示的P0和P2區段相對應的區域)。可以應用重複填充以獲得在圖12所示的P1和P3區段預測的內插中使用的一個或複數樣本值。
為了預測對應於P0和P2區段的部分,當需要內插時,可以藉由重複填充(例如,藉由使用360度視訊的循環屬性重複在圖片的右邊緣處的一個或複數樣本)來獲得一個或複數相鄰樣本。可以跳過從圖片的左邊緣提取一個或複數樣本。為了獲得用於該兩個部分中的每一個的兩個運動向量,對於對應於P1和P3區段的第一部分,運動向量可以保持不變。對於對應於
P0和P2區段的第二部分,可對運動向量的水平分量應用模操作,例如,以實現如本文所述的環繞效應。
資料可以在該快取外部被存取。對於水平幾何結構填充,可限制回繞操作以跳過獲取位於所快取的資料外部的一個或一個以上樣本。例如,水平幾何結構填充可以在給定範圍SL(SL  face_width_in_luma_samples,SC=SL/SubWidthC)內執行,該範圍可以與快取大小相關。對於位於所快取的資料之外的一個或複數樣本,可以在該範圍之外應用重複填充。公式(15)以及(18)可以分別被公式(19)和(20)代替。
face_width_in_luma_samples,SC=SL/SubWidthC)內執行,該範圍可以與快取大小相關。對於位於所快取的資料之外的一個或複數樣本,可以在該範圍之外應用重複填充。公式(15)以及(18)可以分別被公式(19)和(20)代替。


當在分數樣本位置處內插一個或一個以上樣本時,可導出內插濾波器所使用的全樣本位置處的一個或一個以上樣本,例如,如分別針對亮度分量和色度分量的表4及/或表5中所示。舉例來說,考慮圖15中所描繪的情形,可使用全樣本位置(xAi,j,yAi,j)處的亮度樣本Ai,j來內插分數樣本位置處的亮度樣本a0,0到r0,0。對於全樣本位置處的亮度樣本Ai,j,可導出xAi,j和yAi,j座標,例如,如分別針對亮度分量和色度分量的表4及/或表5中所示。
圖16A是示出了可以實施一個或複數所揭露的實施例的例示通信系統100的示圖。該通信系統100可以是為複數無線使用者提供語音、資料、
視訊、訊息傳遞、廣播等內容的多重存取系統。該通信系統100可以藉由共用包括無線頻寬在內的系統資源而使複數無線使用者能夠存取此類內容。舉例來說,通信系統100可以使用一種或多種通道存取方法,例如分碼多重存取(CDMA)、分時多重存取(TDMA)、分頻多重存取(FDMA)、正交FDMA(OFDMA)、單載波FDMA(SC-FDMA)、零尾唯一字DFT擴展OFDM(ZT UW DTS-s OFDM)、唯一字OFDM(UW-OFDM)、資源塊過濾OFDM以及濾波器組多載波(FBMC)等等。
如圖16A所示,通信系統100可以包括無線傳輸/接收單元(WTRU)102a、102b、102c、102d、RAN 104/113、CN 106/115、公共交換電話網路(PSTN)108、網際網路110以及其他網路112,然而應該瞭解,所揭露的實施例設想了任意數量的WTRU、基地台、網路及/或網路元件。每一個WTRU 102a、102b、102c、102d可以是被配置成在無線環境中操作及/或通信的任何類型的裝置。舉例來說,任一WTRU 102a、102b、102c、102d都可被稱為“站”及/或“STA”,其可以被配置成傳輸及/或接收無線信號,並且可以包括使用者設備(UE)、行動站、固定或行動用戶單元、基於訂閱的單元、呼叫器、行動電話、個人數位助理(PDA)、智慧型電話、膝上型電腦、上網本、個人電腦、無線感測器、熱點或Mi-Fi裝置、物聯網(IoT)裝置、手錶或其他可穿戴裝置、頭戴顯示器(HMD)、車輛、無人機、醫療裝置和應用(例如遠端手術)、工業裝置和應用(例如機器人及/或在工業及/或自動處理鏈環境中操作的其他無線裝置)、消費類電子裝置、以及在商業及/或工業無線網路上操作的裝置等等。WTRU 102a、102b、102c、102d中的任意者可被可交換地稱為UE。
通信系統100還可以包括基地台114a及/或基地台114b。每一個基地台114a、114b可以是被配置成藉由以無線方式與WTRU 102a、102b、
102c、102d中的至少一個無線對接來促使其存取一個或複數通信網路(例如CN 106/115、網際網路110、及/或其他網路112)的任何類型的裝置。舉例來說,基地台114a、114b可以是基地收發台(BTS)、節點B、e節點B、本地節點B、本地e節點B、gNB、NR節點B、網站控制器、存取點(AP)、以及無線路由器等等。雖然每一個基地台114a、114b都被描述成了單個元件,然而應該瞭解。基地台114a、114b可以包括任何數量的互連基地台及/或網路元件。
基地台114a可以是RAN 104/113的一部分,並且該RAN還可以包括其他基地台及/或網路元件(未顯示),例如基地台控制器(BSC)、無線電網路控制器(RNC)、中繼節點等等。基地台114a及/或基地台114b可被配置成在名為胞元(未顯示)的一個或複數載波頻率上傳輸及/或接收無線信號。這些頻率可以處於授權頻譜、無授權頻譜或是授權與無授權頻譜的組合之中。胞元可以為相對固定或者有可能隨時間變化的特定地理區域提供無線服務覆蓋。胞元可被進一步分成胞元扇區。例如,與基地台114a相關聯的胞元可被分為三個扇區。由此,在一個實施例中,基地台114a可以包括三個收發器,例如,胞元的每個扇區有一個。在實施例中,基地台114a可以使用多輸入多輸出(MIMO)技術,並且可以為胞元的每一個扇區使用複數收發器。舉例來說,藉由使用波束成形,可以在期望的空間方向上傳輸及/或接收信號。
基地台114a、114b可以藉由空中介面116來與WTRU 102a、102b、102c、102d中的一者或多者進行通信,其中該空中介面116可以是任何適當的無線通訊鏈路(例如射頻(RF)、微波、釐米波、微米波、紅外線(IR)、紫外線(UV)、可見光等等)。空中介面116可以使用任何適當的無線電存取技術(RAT)來建立。
更具體地說,如上所述,通信系統100可以是多重存取系統,並且可以使用一種或多種通道存取方案,例如CDMA、TDMA、FDMA、OFDMA以及SC-FDMA等等。例如,RAN 104/113中的基地台114a與WTRU 102a、102b、102c可以實施無線電技術,例如通用行動電信系統(UMTS)陸地無線電存取(UTRA),其可以使用寬頻CDMA(WCDMA)來建立空中介面116。WCDMA可以包括如高速封包存取(HSPA)及/或演進型HSPA(HSPA+)之類的通信協定。HSPA可以包括高速下鏈(DL)封包存取(HSDPA)及/或高速UL封包存取(HSUPA)。
在實施例中,基地台114a和WTRU 102a、102b、102c可以實施無線電技術,例如演進型UMTS陸地無線電存取(E-UTRA),其可以使用長期演進(LTE)及/或先進LTE(LTE-A)及/或先進LTA Pro(LTE-A Pro)來建立空中介面116。
在實施例中,基地台114a和WTRU 102a、102b、102c可以實施無線電技術,例如NR無線電存取,其可以使用新型無線電(NR)來建立空中介面116。
在實施例中,基地台114a和WTRU 102a、102b、102c可以實施多種無線電存取技術。舉例來說,基地台114a和WTRU 102a、102b、102c可以共同實施LTE無線電存取和NR無線電存取(例如使用雙連接(DC)原理)。由此,WTRU 102a、102b、102c使用的空中介面可以多種類型的無線電存取技術及/或向/從多種類型的基地台(例如eNB和gNB)發送的傳輸為特徵。
在其他實施例中,基地台114a和WTRU 102a、102b、102c可以實施以下的無線電技術,例如IEEE 802.11(即無線保真度(WiFi))、IEEE 802.16(全球互通微波存取(WiMAX))、CDMA2000、CDMA2000 1X、CDMA2000 EV-DO、臨時標準2000(IS-2000)、臨時標準95(IS-95)、臨時標
準856(IS-856)、全球行動通信系統(GSM)、用於GSM演進的增強資料速率(EDGE)以及GSM EDGE(GERAN)等等。
圖16A中的基地台114b可以是無線路由器、本地節點B、本地e節點B或存取點,並且可以使用任何適當的RAT來促成局部區域中的無線連接,例如營業場所、住宅、車輛、校園、工業設施、空中走廊(例如供無人機使用)以及道路等等。在一個實施例中,基地台114b與WTRU 102c、102d可以藉由實施IEEE 802.11之類的無線電技術來建立無線區域網路(WLAN)。在實施例中,基地台114b與WTRU 102c、102d可以藉由實施IEEE 802.15之類的無線電技術來建立無線個人區域網路(WPAN)。在再一實施例中,基地台114b和WTRU 102c、102d可藉由使用基於蜂巢的RAT(例如WCDMA、CDMA2000、GSM、LTE、LTE-A、LTE-A Pro、NR等等)來建立微微胞元或毫微微胞元。如圖16A所示,基地台114b可以直連到網際網路110。由此,基地台114b不需要經由CN 106/115來存取網際網路110。
RAN 104/113可以與CN 106/115進行通信,其中該CN 106/115可以是被配置成向一個或複數WTRU 102a、102b、102c、102d提供語音、資料、應用及/或藉助網際網路協定語音(VoIP)服務的任何類型的網路。該資料可以具有不同的服務品質(QoS)需求,例如不同的流通量需求、潛時需求、容錯需求、可靠性需求、資料流通量需求、以及行動性需求等等。CN 106/115可以提供呼叫控制、記帳服務、基於行動位置的服務、預付費呼叫、網際網路連接、視訊分發等等,及/或可以執行使用者驗證之類的高級安全功能。雖然在圖16A中沒有顯示,然而應該瞭解,RAN 104/113及/或CN 106/115可以直接或間接地和其他那些與RAN 104/113使用相同RAT或不同RAT的RAN進行通信。例如,除了與使用NR無線電技術的RAN 104/113相連之外,
CN 106/115還可以與使用GSM、UMTS、CDMA 2000、WiMAX、E-UTRA或WiFi無線電技術的別的RAN(未顯示)通信。
CN 106/115還可以充當供WTRU 102a、102b、102c、102d存取PSTN 108、網際網路110及/或其他網路112的閘道。PSTN 108可以包括提供簡易老式電話服務(POTS)的電路交換電話網路。網際網路110可以包括使用了共同通信協定(例如TCP/IP網際網路協定族中的傳輸控制協定(TCP)、使用者資料報協定(UDP)及/或網際網路協定(IP))的全球性互連電腦網路及裝置之系統。網路112可以包括由其他服務供應商擁有及/或操作的有線及/或無線通訊網路。例如,網路112可以包括與一個或複數RAN相連的另一個CN,其中該一個或複數RAN可以與RAN 104/113使用相同RAT或不同RAT。
通信系統100中一些或所有WTRU 102a、102b、102c、102d可以包括多模式能力(例如,WTRU 102a、102b、102c、102d可以包括在不同無線鏈路上與不同無線網路通信的複數收發器)。例如,圖16A所示的WTRU 102c可被配置成與可以使用基於蜂巢的無線電技術的基地台114a通信,以及與可以使用IEEE 802無線電技術的基地台114b通信。
圖16B是示出了例示WTRU 102的系統圖式。如圖16B所示,WTRU 102可以包括處理器118、收發器120、傳輸/接收元件122、揚聲器/麥克風124、小鍵盤126、顯示器/觸控板128、非可移記憶體130、可移記憶體132、電源134、全球定位系統(GPS)晶片組136以及其他週邊設備138。應該瞭解的是,在保持符合實施例的同時,WTRU 102還可以包括前述元件的任何子組合。
處理器118可以是通用處理器、專用處理器、常規處理器、數位訊號處理器(DSP)、複數微處理器、與DSP核心關聯的一個或複數微處理器、控制器、微控制器、專用積體電路(ASIC)、現場可程式閘陣列(FPGA)電路、
其他任何類型的積體電路(IC)以及狀態機等等。處理器118可以執行信號寫碼、資料處理、功率控制、輸入/輸出處理、及/或其他任何能使WTRU 102在無線環境中操作的功能。處理器118可以耦合至收發器120,該收發器120可以耦合至傳輸/接收元件122。雖然圖16B將處理器118和收發器120描述成各別組件,然而應該瞭解,處理器118和收發器120也可以整合在一個電子封裝或晶片中。
傳輸/接收元件122可被配置成經由空中介面116來傳輸或接收往或來自基地台(例如基地台114a)的信號。舉個例子,在一個實施例中,傳輸/接收元件122可以是被配置成傳輸及/或接收RF信號的天線。作為範例,在實施例中,傳輸/接收元件122可以是被配置成傳輸及/或接收IR、UV或可見光信號的放射器/偵測器。在又一實施例中,傳輸/接收元件122可被配置成傳輸及/或接收RF和光信號。應該瞭解的是,傳輸/接收元件122可以被配置成傳輸及/或接收無線信號的任何組合。
雖然在圖16B中將傳輸/接收元件122描述成是單個元件,但是WTRU 102可以包括任何數量的傳輸/接收元件122。更具體地說,WTRU 102可以使用MIMO技術。由此,在實施例中,WTRU 102可以包括兩個或複數藉由空中介面116來傳輸和接收無線電信號的傳輸/接收元件122(例如複數天線)。
收發器120可被配置成對傳輸/接收元件122所要傳送的信號進行調變,以及對傳輸/接收元件122接收的信號進行解調。如上所述,WTRU 102可以具有多模式能力。因此,收發器120可以包括使WTRU 102能經由藉助多種RAT(例如NR和IEEE 802.11)來進行通信的複數收發器。
WTRU 102的處理器118可以耦合到揚聲器/麥克風124、小鍵盤126及/或顯示器/觸控板128(例如液晶顯示器(LCD)顯示單元或有機發光二極體
(OLED)顯示單元),並且可以接收來自揚聲器/麥克風124、小鍵盤126及/或顯示器/觸控板128(例如液晶顯示器(LCD)顯示單元或有機發光二極體(OLED)顯示單元)的使用者輸入資料。處理器118還可以向揚聲器/麥克風124、小鍵盤126及/或顯示器/觸控板128輸出使用者資料。此外,處理器118可以從諸如非可移記憶體130及/或可移記憶體132之類的任何適當的記憶體中存取資訊,以及將資料存入這些記憶體。非可移記憶體130可以包括隨機存取記憶體(RAM)、唯讀記憶體(ROM)、硬碟或是其他任何類型的記憶儲存裝置。可移記憶體132可以包括用戶身份模組(SIM)卡、記憶條、安全數位(SD)記憶卡等等。在其他實施例中,處理器118可以從那些並非實體位於WTRU 102的記憶體存取資訊,以及將資料存入該記憶體,作為範例,該記憶體可以位於伺服器或家用電腦(未顯示)。
處理器118可以接收來自電源134的電力,並且可被配置分發及/或控制用於WTRU 102中的其他組件的電力。電源134可以是為WTRU 102供電的任何適當裝置。例如,電源134可以包括一個或複數乾電池組(如鎳鎘(NiCd)、鎳鋅(NiZn)、鎳氫(NiMH)、鋰離子(Li-ion)等等)、太陽能電池以及燃料電池等等。
處理器118還可以耦合到GPS晶片組136,該晶片組可被配置成提供與WTRU 102的目前位置相關的位置資訊(例如經度和緯度)。WTRU 102可以經由空中介面116接收來自基地台(例如基地台114a、114b)的加上或取代GPS晶片組136資訊的位置資訊,及/或根據從兩個或更複數附近基地台接收的信號定時來確定其位置。應該瞭解的是,在保持符合實施例的同時,WTRU 102可以經由藉助任何適當的定位方法來獲取位置資訊。
處理器118還可以耦合到其他週邊設備138,其中該週邊設備138可以包括提供附加特徵、功能及/或有線或無線連接的一個或複數軟體及/
或硬體模組。例如,週邊設備138可以包括加速度計、電子指南針、衛星收發器、數位相機(用於照片及/或視訊)、通用序列匯流排(USB)埠、振動裝置、電視收發器、免持耳機、藍牙®模組、調頻(FM)無線電單元、數位音樂播放機、媒體播放機、視訊遊戲機模組、網際網路瀏覽器、虛擬實境及/或增強實境(VR/AR)裝置、以及活動跟蹤器等等。週邊設備138可以包括一個或複數感測器,該感測器可以是以下的一個或複數個:陀螺儀、加速度計、霍爾效應感測器、磁力計、方位感測器、鄰近感測器、溫度感測器、時間感測器、地理位置感測器、高度計、光感測器、觸控感測器、磁力計、氣壓計、手勢感測器、生物測定感測器及/或濕度感測器。
WTRU 102可以包括全雙工無線電裝置,其中對於該無線電裝置來說,一些或所有信號(例如與用於UL(例如對傳輸而言)和下鏈(例如對接收而言)的特別子訊框相關聯)的接收及傳輸可以是併發及/或同時的。全雙工無線電裝置可以包括藉助硬體(例如扼流圈)或是憑藉處理器(例如各別的處理器(未顯示)或是憑藉處理器118)的信號處理來減小及/或實質消除自干擾的干擾管理單元。在實施例中,WTRU 102可以包括傳送和接收一些或所有信號(例如與用於UL(例如對傳輸而言)或下鏈(例如對接收而言)的特別子訊框相關聯)的半雙工無線電裝置。
圖16C是示出了根據實施例的RAN 104和CN 106的系統圖式。如上所述,RAN 104可以在空中介面116上使用E-UTRA無線電技術來與WTRU 102a、102b、102c進行通信。該RAN 104還可以與CN 106進行通信。
RAN 104可以包括e節點B 160a、160b、160c,然而應該瞭解,在保持符合實施例的同時,RAN 104可以包括任何數量的e節點B。每一個e節點B 160a、160b、160c都可以包括在空中介面116上與WTRU 102a、102b、102c通信的一個或複數收發器。在一個實施例中,e節點B 160a、160b、160c
可以實施MIMO技術。由此,舉例來說,e節點B 160a可以使用複數天線來向WTRU 102a傳輸無線信號,及/或接收來自WTRU 102a的無線信號。
每一個e節點B 160a、160b、160c都可以關聯於一個特別胞元(未顯示),並且可被配置成處理無線電資源管理決定、交接決定、UL及/或DL中的使用者排程等等。如圖16C所示,e節點B 160a、160b、160c彼此可以藉由X2介面進行通信。
圖16C所示的CN 106可以包括移動性管理實體(MME)162、服務閘道(SGW)164以及封包資料網路(PDN)閘道(或PGW)166。雖然前述的每一個元件都被描述成是CN 106的一部分,然而應該瞭解,這其中的任一元件都可以由CN操作者之外的實體擁有及/或操作。
MME 162可以經由S1介面連接到RAN 104中的每一個e節點B 160a、160b、160c,並且可以充當控制節點。例如,MME 162可以負責驗證WTRU 102a、102b、102c的使用者,承載啟動/停用,以及在WTRU 102a、102b、102c的初始附著過程中選擇特別的服務閘道等等。MME 162還可以提供一個用於在RAN 104與使用其他無線電技術(例如GSM及/或WCDMA)的其他RAN(未顯示)之間進行切換的控制平面功能。
SGW 164可以經由S1介面連接到RAN 104中的每一個e節點B 160a、160b、160c。SGW 164通常可以路由和轉發往/來自WTRU 102a、102b、102c的使用者資料封包。SGW 164可以執行其他功能,例如在eNB間的交接過程中錨定使用者平面,在DL資料可供WTRU 102a、102b、102c使用時觸發傳呼處理,以及管理並儲存WTRU 102a、102b、102c的上下文等等。
SGW 164可以連接到PGW 166,該PGW 166可以為WTRU 102a、102b、102c提供封包交換網路(例如網際網路110)存取,以便促成WTRU 102a、102b、102c與賦能IP的裝置之間的通信。
CN 106可以促成與其他網路的通信。例如,CN 106可以為WTRU 102a、102b、102c提供電路切換式網路(例如PSTN 108)存取,以便促成WTRU 102a、102b、102c與傳統的陸線通信裝置之間的通信。例如,CN 106可以包括一個IP閘道(例如IP多媒體子系統(IMS)伺服器)或與之進行通信,並且該IP閘道可以充當CN 106與PSTN 108之間的介面。此外,CN 106可以為WTRU 102a、102b、102c提供針對其他網路112的存取,其中該其他網路112可以包括其他服務供應商擁有及/或操作的其他有線及/或無線網路。
雖然在圖16A至圖16D中將WTRU描述成了無線終端,然而應該想到的是,在某些代表實施例中,此類終端與通信網路可以使用(例如臨時或永久性)有線通信介面。
在代表實施例中,該其他網路112可以是WLAN。
採用基礎架構基本服務集(BSS)模式的WLAN可以具有用於該BSS的存取點(AP)以及與該AP相關聯的一個或複數站(STA)。該AP可以存取或是有介面於分散式系統(DS)或是將訊務送入及/或送出BSS的別的類型的有線/無線網路。源於BSS外部且去往STA的訊務可以藉由AP到達並被遞送至STA。源自STA往BSS外部的目的地的訊務可被發送至AP,以便遞送到分別的目的地。處於BSS內部的STA之間的訊務可以藉由AP來發送,例如源STA可以向AP發送訊務並且AP可以將訊務遞送至目的地STA。處於BSS內部的STA之間的訊務可被認為及/或稱為點到點訊務。該點到點訊務可以在源與目的地STA之間(例如在其間直接)用直接鏈路建立(DLS)來發送。在某些代表實施例中,DLS可以使用802.11e DLS或802.11z隧道化DLS(TDLS)。使用獨立BSS(IBSS)模式的WLAN可不具有AP,並且處於該IBSS內部或是使用該IBSS的STA(例如所有STA)彼此可以直接通信。在這裡,IBSS通信模式有時可被稱為“特定(ad-hoc)”通信模式。
在使用802.11ac基礎設施操作模式或類似的操作模式時,AP可以在固定通道(例如主通道)上傳送信標。該主通道可以具有固定寬度(例如20MHz的頻寬)或是藉助經由傳訊動態設置的寬度。主通道可以是BSS的操作通道,並且可被STA用來與AP建立連接。在某些代表實施例中,所實施的可以是具有衝突避免的載波感測多重存取(CSMA/CA)(例如在802.11系統中)。對於CSMA/CA來說,包括AP在內的STA(例如每一個STA)可以感測主通道。如果特別STA感測到/偵測到及/或確定主通道繁忙,那麼該特別STA可以回退。在指定的BSS中,在任何指定時間可有一個STA(例如只有一個站)進行傳輸。
高流通量(HT)STA可以使用寬度為40MHz的通道來進行通信(例如藉助經由將寬度為20MHz的主通道與寬度為20MHz的相鄰或不相鄰通道相結合來形成寬度為40MHz的通道)。
超高流通量(VHT)STA可以支援寬度為20MHz、40MHz、80MHz及/或160MHz的通道。40MHz及/或80MHz通道可以藉由組合連續的20MHz通道來形成。160MHz通道可以藉由組合8個連續的20MHz通道或者藉由組合兩個不連續的80MHz通道(這種組合可被稱為80+80配置)來形成。對於80+80配置來說,在通道編碼之後,資料可被傳遞並經過一個分段解析器,該分段解析器可以將資料非成兩個流。在每一個流上可以各別執行反向快速傅利葉變換(IFFT)處理以及時域處理。該流可被映射在兩個80MHz通道上,並且資料可以由執行傳輸的STA來傳送。在執行接收的STA的接收器上,用於80+80配置的上述操作可以是相反的,並且組合資料可被發送至媒體存取控制(MAC)。
802.11af和802.11ah支援1GHz以下的操作模式。相對於802.11n和802.11ac中使用的,在802.11af和802.11ah中使用通道操作頻寬和載波有所
縮減。802.11af在TV白空間(TVWS)頻譜中支援5MHz、10MHz和20MHz頻寬,並且802.11ah支援使用非TVWS頻譜的1MHz、2MHz、4MHz、8MHz和16MHz頻寬。根據某些代表實施例,802.11ah可以支援儀錶類型控制/機器類型通信(例如巨集覆蓋區域中的MTC裝置)。MTC可以具有某種能力,例如包含了支援(例如只支援)某些及/或有限頻寬在內的受限能力。MTC裝置可以包括電池,並且該電池的電池壽命高於臨界值(例如用於保持很長的電池壽命)。
可以支援複數通道和通道頻寬的WLAN系統(例如,802.11n、802.11ac、802.11af以及802.11ah)包括一個可被指定成主通道的通道。該主通道的頻寬可以等於BSS中的所有STA所支援的最大共同操作頻寬。主通道的頻寬可以由STA設置及/或限制,其中該STA源自在支援最小頻寬操作模式的BSS中操作的所有STA。在關於802.11ah的範例中,即使BSS中的AP和其他STA支援2MHz、4MHz、8MHz、16MHz及/或其他通道頻寬操作模式,但對支援(例如只支援)1MHz模式的STA(例如MTC類型的裝置)來說,主通道的寬度可以是1MHz。載波感測及/或網路分配向量(NAV)設置可以取決於主通道的狀態。如果主通道繁忙(例如因為STA(其只支援1MHz操作模式)對AP進行傳輸),那麼即使大多數的頻帶保持空閒並且可供使用,也可以認為整個可用頻帶繁忙。
在美國,可供802.11ah使用的可用頻帶是902MHz到928MHz。在韓國,可用頻帶是917.5MHz到923.5MHz。在日本,可用頻帶是916.5MHz到927.5MHz。依照國家碼,可用於802.11ah的總頻寬是6MHz到26MHz。
圖16D是示出了根據實施例的RAN 113和CN 115的系統圖式。如上所述,RAN 113可以在空中介面116上使用NR無線電技術來與WTRU 102a、102b、102c進行通信。RAN 113還可以與CN 115進行通信。
RAN 113可以包括gNB 180a、180b、180c,但是應該瞭解,在保持符合實施例的同時,RAN 113可以包括任何數量的gNB。每一個gNB 180a、180b、180c都可以包括一個或複數收發器,以便藉由空中介面116來與WTRU 102a、102b、102c通信。在一個實施例中,gNB 180a、180b、180c可以實施MIMO技術。例如,gNB 180a、180b可以使用波束成形處理來傳輸信號到及/或接收信號自gNB 180a、180b、180c。由此,舉例來說,gNB 180a可以使用複數天線來向WTRU 102a傳輸無線信號,及/或接收來自WTRU 102a的無線信號。在實施例中,gNB 180a、180b、180c可以實施載波聚合技術。例如,gNB 180a可以向WTRU 102a傳送複數分量載波(未顯示)。這些分量載波的一個子集可以處於無授權頻譜上,而剩餘分量載波則可以處於授權頻譜上。在實施例中,gNB 180a、180b、180c可以實施協作多點(CoMP)技術。例如,WTRU 102a可以接收來自gNB 180a和gNB 180b(及/或gNB 180c)的協作傳輸。
WTRU 102a、102b、102c可以使用與可縮放參數配置相關聯的傳輸來與gNB 180a、180b、180c進行通信。例如,對於不同的傳輸、不同的胞元及/或不同的無線傳輸頻譜部分來說,OFDM符號間距及/或OFDM子載波間距可以是不同的。WTRU 102a、102b、102c可以使用具有不同或可縮放長度的子訊框或傳輸時間間隔(TTI)(例如包含了不同數量的OFDM符號及/或持續變化的絕對時間長度)來與gNB 180a、180b、180c進行通信。
gNB 180a、180b、180c可被配置成與採用分立配置及/或非分立配置的WTRU 102a、102b、102c進行通信。在分立配置中,WTRU 102a、102b、102c可以在不存取其他RAN(例如e節點B 160a、160b、160c)的情況下與gNB 180a、180b、180c進行通信。在分立配置中,WTRU 102a、102b、102c可以使用gNB 180a、180b、180c中的一者或多者作為行動錨點。在分立配置
中,WTRU 102a、102b、102c可以使用無授權頻帶中的信號來與gNB 180a、180b、180c進行通信。在非分立配置中,WTRU 102a、102b、102c會在與別的RAN(例如e節點B 160a、160b、160c)進行通信/相連的同時與gNB 180a、180b、180c進行通信/相連。舉例來說,WTRU 102a、102b、102c可以藉由實施DC原理而以實質同時的方式與一個或複數gNB 180a、180b、180c以及一個或複數e節點B 160a、160b、160c進行通信。在非分立配置中,e節點B 160a、160b、160c可以充當WTRU 102a、102b、102c的行動錨點,並且gNB 180a、180b、180c可以提供附加的覆蓋及/或流通量,以便為WTRU 102a、102b、102c提供服務。
每一個gNB 180a、180b、180c都可以關聯於特別胞元(未顯示),並且可以被配置成處理無線電資源管理決定、交接決定、UL及/或DL中的使用者排程、支援網路截割、實施雙連線性、實施NR與E-UTRA之間的交互工作、路由往使用者平面功能(UPF)184a、184b的使用者平面資料、以及路由往存取和移動性管理功能(AMF)182a、182b的控制平面資訊等等。如圖16D所示,gNB 180a、180b、180c彼此可以藉由Xn介面通信。
圖16D所示的CN 115可以包括至少一個AMF 182a、182b,至少一個UPF 184a、184b,至少一個對話管理功能(SMF)183a、183b,並且有可能包括資料網路(DN)185a、185b。雖然每一個前述元件都被描述成CN 115的一部分,但是應該瞭解,這其中的任一元件都可以被CN操作者之外的其他實體擁有及/或操作。
AMF 182a、182b可以經由N2介面連接到RAN 113中的一者或多者gNB 180a、180b、180c,並且可以充當控制節點。例如,AMF 182a、182b可以負責驗證WTRU 102a、102b、102c的使用者,支援網路截割(例如處理具有不同需求的不同PDU對話),選擇特別的SMF 183a、183b,管理註冊區
域,終止NAS傳訊,以及行動性管理等等。AMF 182a、1823b可以使用網路截割處理,以便基於WTRU 102a、102b、102c使用的服務類型來定制為WTRU 102a、102b、102c提供的CN支援。舉例來說,針對不同的使用情況,可以建立不同的網路截割,該使用情況例如為依賴於超可靠低潛時(URLLC)存取的服務、依賴於增強型大規模行動寬頻(eMBB)存取的服務、及/或用於機器類型通信(MTC)存取的服務等等。AMF 162可以提供用於在RAN 113與使用其他無線電技術(例如LTE、LTE-A、LTE-A Pro及/或諸如WiFi之類的非3GPP存取技術)的其他RAN(未顯示)之間切換的控制平面功能。
SMF 183a、183b可以經由N11介面連接到CN 115中的AMF 182a、182b。SMF 183a、183b還可以經由N4介面連接到CN 115中的UPF 184a、184b。SMF 183a、183b可以選擇和控制UPF 184a、184b,並且可以藉由UPF 184a、184b來配置訊務路由。SMF 183a、183b可以執行其他功能,例如管理和分配UE IP位址、管理PDU對話、控制策略實施和QoS,以及提供下鏈資料通知等等。PDU對話類型可以是基於IP的、不基於IP的,以及基於乙太網路的等等。
UPF 184a、184b可以經由N3介面連接到RAN 113中的一者或多者gNB 180a、180b、180c,這樣可以為WTRU 102a、102b、102c提供對封包交換網路(例如網際網路110)的存取,以便促成WTRU 102a、102b、102c與賦能IP的裝置之間的通信,UPF 184a、184b可以執行其他功能,例如路由和轉發封包、實施使用者平面策略、支援多連接(multi-homed)PDU對話、處理使用者平面QoS、緩衝下鏈封包、以及提供行動性錨定處理等等。
CN 115可以促成與其他網路的通信。例如,CN 115可以包括或者可以與充當CN 115與PSTN 108之間的介面的IP閘道(例如IP多媒體子系統
(IMS)伺服器)進行通信。此外,CN 115可以為WTRU 102a、102b、102c提供針對其他網路112的存取,這其中可以包括其他服務供應商擁有及/或操作的其他有線及/或無線網路。在一個實施例中,WTRU 102a、102b、102c可以經由到UPF 184a、184b的N3介面以及介於UPF 184a、184b與DN 185a、185b之間的N6介面並藉由UPF 184a、184b連接到本地資料網路(DN)185a、185b。
有鑒於圖16A至圖16D以及關於圖16A至圖16D的相應描述,在這裡對照以下的一項或多項描述的一個或複數或所有功能可以由一個或複數模擬裝置(未顯示)來執行:WTRU 102a-d、基地台114a-b、e節點B 160a-c、MME 162、SGW 164、PGW 166、gNB 180a-c、AMF 182a-b、UPF 184a-b、SMF 183a-b、DN 185 a-b及或這裡描述的其他任何裝置(一個或複數個)。這些模擬裝置可以是被配置成模擬這裡一個或複數或所有功能的一個或複數裝置。舉例來說,這些模擬裝置可用於測試其他裝置及/或模擬網路及/或WTRU功能。
該模擬裝置可被設計成在實驗室環境及/或操作者網路環境中實施關於其他裝置的一項或多項測試。例如,該一個或複數模擬裝置可以在被完全或部分作為有線及/或無線通訊網路一部分實施及/或部署的同時執行一個或複數或所有功能,以便測試通信網路內部的其他裝置。該一個或複數模擬裝置可以在被臨時作為有線及/或無線通訊網路的一部分實施/部署的同時執行一個或複數或所有功能。該模擬裝置可以直接耦合到別的裝置以用於測試的目的,及/或可以使用空中無線通訊來執行測試。
該一個或複數模擬裝置可以在未被作為有線及/或無線通訊網路一部分實施/部署的同時執行包括所有功能在內的一個或複數功能。例如,該模擬裝置可以在測試實驗室及/或未被部署(例如測試)的有線及/或無線通
訊網路的測試場景中使用,以便實施關於一個或複數元件的測試。該一個或複數模擬裝置可以是測試設備。該模擬裝置可以使用直接的RF耦合及/或藉助經由RF電路(作為範例,該電路可以包括一個或複數天線)的無線通訊來傳輸及/或接收資料。
在此所述的處理及技術可以在併入電腦可讀媒體中的電腦程式、軟體及/或韌體中實施,以由電腦及/或處理器執行。電腦可讀媒體的範例包括但不限於電子信號(藉由有線及/或無線連接傳輸)及/或電腦可讀儲存媒體。電腦可讀儲存媒體的範例包括但不限於唯讀記憶體(ROM)、隨機存取記憶體(RAM)、暫存器、緩衝記憶體、半導體記憶體裝置、磁媒體(例如,包括但不限於內部硬碟和可移除磁片)、磁光媒體及/或光學媒體(例如CD-ROM碟片及/或數位通用碟片(DVD))。與軟體相關聯的處理器可用於實施用於WTRU、終端、基地台、RNC及/或任何主機電腦中用途的射頻收發器。
ERP:等矩形投影
PU:預測單元
Claims (26)
- 一種用於一視訊內容的解碼的方法,該方法包括:在視訊資料中獲得與該視訊內容相關聯的一圖片;獲得一環繞賦能指示,該環繞賦能指示指示是否賦能一水平環繞運動補償;基於該環繞賦能指示,確定該水平環繞運動補償是否被賦能;基於該水平環繞運動補償被賦能之確定,解析該視訊資料以獲得一參考樣本環繞偏移之一偏移指示;確定該圖片中的一目前樣本之該參考樣本環繞偏移;基於該參考樣本環繞偏移、該圖片的一圖片寬度及一目前樣本位置,確定該目前樣本的一參考樣本位置;以及基於該參考樣本位置,預測該目前樣本。
- 如請求項1所述的方法,其中該方法進一步包括:基於該水平環繞運動補償被停用之確定,跳過該解析該視訊資料以獲得該參考樣本環繞偏移的該偏移指示。
- 如請求項1所述的方法,其中該環繞賦能指示是一環繞賦能標誌,其中該環繞賦能標誌指示該水平環繞運動補償是否被賦能。
- 如請求項1所述的方法,其中該參考樣本環繞偏移是基於該偏移指示而被確定的,且其中該參考樣本環繞偏移指示該圖片的一面寬度。
- 如請求項1所述的方法,其中確定該圖片中的該目前樣本的該參考樣本環繞偏移包括:獲得一大小指示,其中該大小指示被配置以指示該圖片之一保護帶的一寬度;以及基於該大小指示,獲得該圖片的一面寬度,其中該大小指示被配置以指示亮度樣本中的該保護帶的該寬度。
- 如請求項5所述的方法,其中該保護帶的該寬度為亮度樣本中的該保護帶的一第一寬度,其中該大小指示進一步被配置以指示亮度樣本中的該保護帶的一第二寬度,且其中該圖片的一面寬度基於亮度樣本中的該保護帶的該第一寬度及亮度樣本中的該保護帶的該第二寬度而被獲得。
- 如請求項1所述的方法,其中該環繞賦能指示和該參考樣本環繞偏移是在一序列級被獲得的。
- 如請求項1所述的方法,其中確定該參考樣本位置包括:基於該參考樣本環繞偏移和該圖片的該圖片寬度來獲得該圖片的一面寬度;識別該圖片中的該目前樣本位置;確定一原始參考樣本位置在該圖片之外;在確定該原始參考樣本位置在該圖片的一最左水平邊界之外後,藉由將該參考樣本環繞偏移添加到與該原始參考樣本位置相關聯的一水平樣本座標來確定該參考樣本位置;以及在確定該原始參考樣本位置在該圖片的一最右水平邊界之外後,藉由從與該原始參考樣本位置相關聯的該水平樣本座標減去該參考樣本環繞偏移來確定該參考樣本位置。
- 如請求項1所述的方法,其中該方法包括:確定一原始參考樣本位置在該圖片之外;以及基於該原始參考樣本位置在該圖片之外的確定,藉由將該參考樣本環繞偏移應用於與該原始參考樣本位置相關聯的一水平樣本座標來獲得該參考樣本位置。
- 如請求項1所述的方法,其中該方法包括:識別該圖片中的該目前樣本位置;確定該目前樣本位置位於該圖片的一水平邊界處; 確定該參考樣本位置位於該圖片的該水平邊界之外;基於該水平環繞運動補償被停用之確定,識別該圖片的該水平邊界上的該參考樣本位置;以及基於該參考樣本位置來預測該目前樣本。
- 如請求項1所述的方法,其中該圖片與等一矩形投影(ERP)格式、一等面積投影(EAP)格式、或一經調整的等面積投影(AEP)格式相關聯。
- 一種用於一視訊內容的解碼的裝置,包括:一處理器,該處理器被配置以:在視訊資料中獲得與該視訊內容相關聯的一圖片;獲得一環繞賦能指示,該環繞賦能指示指示是否賦能一水平環繞運動補償;基於所獲得的該環繞賦能指示,確定該水平環繞運動補償是否被賦能;基於該水平環繞運動補償被賦能之確定,解析該視訊資料以獲得一參考樣本環繞偏移之一偏移指示;確定該圖片中的一目前樣本之該參考樣本環繞偏移;基於該參考樣本環繞偏移、該圖片的一圖片寬度及一目前樣本位置,確定該目前樣本的一參考樣本位置;以及基於該參考樣本位置,預測該目前樣本。
- 如請求項12所述的裝置,其中該處理器進一步被配置以:基於該水平環繞運動補償被停用之確定,跳過該解析該視訊資料以獲得該參考樣本環繞偏移的該偏移指示。
- 如請求項12所述的裝置,其中該參考樣本環繞偏移是基於該偏移指示而被確定的,且其中該參考樣本環繞偏移指示該圖片的一面寬度。
- 如請求項12所述的裝置,其中為了確定該圖片中的該目前樣本的該參考樣本環繞偏移,該處理器被配置以:獲得一大小指示,其中該大小指示被配置以指示該圖片之一保護帶的一寬度;以及基於該大小指示,獲得該圖片的一面寬度,其中該大小指示被配置以指示亮度樣本中的該保護帶的該寬度。
- 如請求項12所述的裝置,其中確定該參考樣本位置包括該處理器被配置以:基於該參考樣本環繞偏移和該圖片的該圖片寬度來獲得該圖片的一面寬度;識別該圖片中的該目前樣本位置;確定一原始參考樣本位置在該圖片之外;在確定該原始參考樣本位置在該圖片的一最左水平邊界之外後,藉由將該參考樣本環繞偏移添加到與該原始參考樣本位置相關聯的一水平樣本座標來確定該參考樣本位置;以及在確定該原始參考樣本位置在該圖片的一最右水平邊界之外後,藉由從與該原始參考樣本位置相關聯的該水平樣本座標減去該參考樣本環繞偏移來確定該參考樣本位置。
- 如請求項12所述的裝置,其中該處理器被配置為:識別該圖片中的該目前樣本位置;確定該目前樣本位置位於該圖片的一水平邊界處;確定該參考樣本位置位於該圖片的該水平邊界之外;基於該水平環繞運動補償被停用之確定,識別該圖片的該水平邊界上的該參考樣本位置;以及基於該參考樣本位置來預測該目前樣本。
- 一種用於一視訊內容的編碼的方法,該方法包括: 在視訊資料中獲得與該視訊內容相關聯的一圖片;獲得一目前樣本位置,其中該目前樣本位置是與所獲得的圖片中的一目前樣本相關聯;確定一參考樣本位置,其中該參考樣本位置是與該目前樣本位置相關聯;基於所確定的參考樣本位置、該圖片的一圖片寬度、以及該目前樣本位置,確定一參考樣本在該圖片之外,其中該參考樣本與該參考樣本位置相關聯;以及基於該參考樣本在該圖片之外的確定,將一環繞賦能指示以及一偏移指示包括在該視訊資料中,其中該環繞賦能指示指示是否賦能一水平環繞運動補償,而且其中該偏移指示是用於一參考樣本環繞偏移。
- 如請求項18所述的方法,其中該環繞賦能指示是一環繞賦能標誌,而且該方法包括:在一序列級包括該參考樣本環繞偏移中或該偏移指示的至少一者。
- 如請求項18所述的方法,包括:在該視訊資料中包括一大小指示,其中該大小指示被配置以指示該圖片中之一保護帶的一第一寬度以及該圖片中之該保護帶的一第二寬度,其中該保護帶的該第一寬度是在亮度樣本中且該保護帶的該第二寬度是在亮度樣本中。
- 一種用於一視訊內容的編碼的裝置,包括:一處理器,該處理器被配置以:在視訊資料中獲得與該視訊內容相關聯的一圖片;獲得一目前樣本位置,其中該目前樣本位置是與所獲得的圖片中的一目前樣本相關聯;確定一參考樣本位置,其中該參考樣本位置是與該目前樣本位置相關聯; 基於所確定的參考樣本位置、該圖片的一圖片寬度、以及該目前樣本位置,確定一參考樣本在該圖片之外,其中該參考樣本與該參考樣本位置相關聯;以及基於該參考樣本在該圖片之外的確定,將一環繞賦能指示以及一偏移指示包括在該視訊資料中,其中該環繞賦能指示指示是否賦能一水平環繞運動補償,而且其中該偏移指示是用於一參考樣本環繞偏移。
- 如請求項21所述的裝置,其中該處理器被配置以:在一序列級包括一參考樣本環繞偏移或該偏移指示的至少一者;以及在該視訊資料中包括一大小指示,其中該大小指示被配置以指示該圖片中之一保護帶的一第一寬度以及該圖片中之該保護帶的一第二寬度,其中該保護帶的該第一寬度是在亮度樣本中且該保護帶的該第二寬度是在亮度樣本中。
- 一種電腦可讀儲存媒體,儲存用於視訊解碼的指令,該指令配置一處理器以執行請求項1至11中任一項。
- 一種非暫態電腦儲存可讀儲存媒體,儲存用於視訊解碼的指令,該指令配置一處理器以執行請求項1至11中任一項。
- 一種電腦可讀儲存媒體,儲存用於視訊編碼的指令,該指令配置一處理器以執行請求項18至20中任一項。
- 一種非暫態電腦儲存可讀儲存媒體,儲存用於視訊編碼的指令,該指令配置一處理器以執行請求項18至20中任一項。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201862737303P | 2018-09-27 | 2018-09-27 | |
| US62/737303 | 2018-09-27 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| TW202029763A TW202029763A (zh) | 2020-08-01 |
| TWI822863B true TWI822863B (zh) | 2023-11-21 |
Family
ID=68165853
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| TW108134379A TWI822863B (zh) | 2018-09-27 | 2019-09-24 | 360度視訊寫碼樣本導出 |
Country Status (8)
| Country | Link |
|---|---|
| US (2) | US11601676B2 (zh) |
| EP (1) | EP3857895A1 (zh) |
| JP (2) | JP7551994B2 (zh) |
| KR (2) | KR102947561B1 (zh) |
| CN (2) | CN118890490A (zh) |
| BR (1) | BR112021005945A2 (zh) |
| TW (1) | TWI822863B (zh) |
| WO (1) | WO2020069058A1 (zh) |
Families Citing this family (36)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11252434B2 (en) * | 2018-12-31 | 2022-02-15 | Tencent America LLC | Method for wrap-around padding for omnidirectional media coding |
| WO2020244503A1 (en) | 2019-06-03 | 2020-12-10 | Beijing Bytedance Network Technology Co., Ltd. | Intra block copy with triangular partitions |
| CN117395397A (zh) | 2019-06-04 | 2024-01-12 | 北京字节跳动网络技术有限公司 | 使用临近块信息的运动候选列表构建 |
| KR20220016839A (ko) | 2019-06-04 | 2022-02-10 | 베이징 바이트댄스 네트워크 테크놀로지 컴퍼니, 리미티드 | 기하학적 분할 모드 코딩을 갖는 모션 후보 리스트 |
| CN113950838B (zh) | 2019-06-06 | 2026-03-17 | 北京字节跳动网络技术有限公司 | 基于子块的帧内块复制 |
| KR102662603B1 (ko) | 2019-06-06 | 2024-04-30 | 베이징 바이트댄스 네트워크 테크놀로지 컴퍼니, 리미티드 | 비디오 코딩을 위한 움직임 후보 리스트 구성 |
| US11659206B2 (en) | 2019-07-02 | 2023-05-23 | Mediatek Inc. | Video encoding method with syntax element signaling of guard band configuration of projection-based frame and associated video decoding method and apparatus |
| CN114128258B (zh) | 2019-07-14 | 2023-12-22 | 北京字节跳动网络技术有限公司 | 视频编解码中的变换块尺寸的限制 |
| US11095916B2 (en) * | 2019-07-23 | 2021-08-17 | Qualcomm Incorporated | Wraparound motion compensation in video coding |
| CN117499625A (zh) | 2019-09-01 | 2024-02-02 | 北京字节跳动网络技术有限公司 | 视频编解码中预测权重的对准 |
| JP7731348B2 (ja) * | 2019-09-19 | 2025-08-29 | インターデジタル マディソン パテント ホールディングス, エスアーエス | 多用途ビデオ符号化のためのシステム及び方法 |
| WO2021052491A1 (en) | 2019-09-19 | 2021-03-25 | Beijing Bytedance Network Technology Co., Ltd. | Deriving reference sample positions in video coding |
| WO2021057996A1 (en) | 2019-09-28 | 2021-04-01 | Beijing Bytedance Network Technology Co., Ltd. | Geometric partitioning mode in video coding |
| CN114556915B (zh) | 2019-10-10 | 2023-11-10 | 北京字节跳动网络技术有限公司 | 几何分割模式中被编解码的块的去块 |
| CN114556918B (zh) | 2019-10-12 | 2025-08-12 | 北京字节跳动网络技术有限公司 | 细化视频编解码工具的使用和信令 |
| JP7414980B2 (ja) | 2019-10-13 | 2024-01-16 | 北京字節跳動網絡技術有限公司 | 参照ピクチャリサンプリングと映像コーディングツールとの間の相互作用 |
| US11095912B2 (en) * | 2019-10-28 | 2021-08-17 | Mediatek Inc. | Video decoding method for decoding part of bitstream to generate projection-based frame with constrained guard band size, constrained projection face size, and/or constrained picture size |
| JP7393550B2 (ja) | 2019-12-11 | 2023-12-06 | 北京字節跳動網絡技術有限公司 | クロス成分適応ループフィルタリングのためのサンプルパディング |
| WO2021127118A1 (en) | 2019-12-17 | 2021-06-24 | Alibaba Group Holding Limited | Methods for performing wrap-around motion compensation |
| MX2022007503A (es) | 2019-12-27 | 2022-07-04 | Beijing Bytedance Network Tech Co Ltd | Se?alizacion de tipos de corte en encabezados de imagenes de video. |
| US11418804B2 (en) * | 2019-12-31 | 2022-08-16 | Tencent America LLC | Method for wrap around motion compensation with reference picture resampling |
| WO2021180022A1 (en) | 2020-03-07 | 2021-09-16 | Beijing Bytedance Network Technology Co., Ltd. | Handling of transform skip mode in video coding |
| CN120568071A (zh) * | 2020-03-26 | 2025-08-29 | 阿里巴巴(中国)有限公司 | 用信号通知视频编码数据的方法 |
| CN115606184B (zh) | 2020-04-01 | 2026-01-30 | 抖音视界有限公司 | 对量化参数增量的信令通知的控制 |
| CN115699742A (zh) | 2020-04-07 | 2023-02-03 | 抖音视界有限公司 | 子图片相关的语法元素的信令通知和推断 |
| WO2021204233A1 (en) | 2020-04-09 | 2021-10-14 | Beijing Bytedance Network Technology Co., Ltd. | Constraints on adaptation parameter set based on color format |
| WO2021204251A1 (en) | 2020-04-10 | 2021-10-14 | Beijing Bytedance Network Technology Co., Ltd. | Use of header syntax elements and adaptation parameter set |
| CN115868159A (zh) | 2020-04-17 | 2023-03-28 | 抖音视界有限公司 | 自适应参数集单元的存在 |
| CN115552802B (zh) | 2020-04-26 | 2025-05-16 | 字节跳动有限公司 | 加权预测信息的条件信令通知 |
| EP4173290A4 (en) | 2020-06-30 | 2024-01-10 | Beijing Bytedance Network Technology Co., Ltd. | BOUNDARY LOCATION FOR ADAPTIVE LOOP FILTERING |
| WO2022037700A1 (en) | 2020-08-21 | 2022-02-24 | Beijing Bytedance Network Technology Co., Ltd. | Coding mode dependent selection of transform skip mode |
| CN116601953A (zh) | 2020-11-24 | 2023-08-15 | 抖音视界有限公司 | 编解码视频中的位置相关系数重新排序 |
| CN118202656A (zh) * | 2021-11-30 | 2024-06-14 | 北京达佳互联信息技术有限公司 | 视频编解码中考虑边界外条件的运动补偿 |
| TWI828091B (zh) * | 2022-03-23 | 2024-01-01 | 中華電信股份有限公司 | 全景影像傳輸系統、方法以及電腦程式產品 |
| WO2024037645A1 (en) * | 2022-08-19 | 2024-02-22 | Mediatek Inc. | Boundary sample derivation in video coding |
| SE2430591A1 (en) * | 2023-11-22 | 2025-05-23 | Emin Zerman | Real-Time Spherical Light Field Reconstruction from a Single Omnidirectional Image |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20060088191A1 (en) * | 2004-10-25 | 2006-04-27 | Tong Zhang | Video content understanding through real time video motion analysis |
| US20170085917A1 (en) * | 2015-09-23 | 2017-03-23 | Nokia Technologies Oy | Method, an apparatus and a computer program product for coding a 360-degree panoramic video |
| WO2018009746A1 (en) * | 2016-07-08 | 2018-01-11 | Vid Scale, Inc. | 360-degree video coding using geometry projection |
Family Cites Families (24)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR100703283B1 (ko) | 2004-03-15 | 2007-04-03 | 삼성전자주식회사 | 회전 매칭을 통해 움직임을 예측하는 영상 부호화 장치 및방법 |
| US7480335B2 (en) * | 2004-05-21 | 2009-01-20 | Broadcom Corporation | Video decoder for decoding macroblock adaptive field/frame coded video data with spatial prediction |
| JP4180547B2 (ja) * | 2004-07-27 | 2008-11-12 | 富士通株式会社 | 動画像データ復号装置、および復号プログラム |
| KR100677142B1 (ko) * | 2004-08-13 | 2007-02-02 | 경희대학교 산학협력단 | 파노라마 영상의 움직임 추정 및 보상 |
| KR100688383B1 (ko) | 2004-08-13 | 2007-03-02 | 경희대학교 산학협력단 | 파노라마 영상의 움직임 추정 및 보상 |
| US8923384B2 (en) * | 2007-12-31 | 2014-12-30 | Netlogic Microsystems, Inc. | System, method and device for processing macroblock video data |
| WO2011052142A1 (ja) * | 2009-10-29 | 2011-05-05 | パナソニック株式会社 | 画像符号化方法および画像復号方法 |
| CN102088610B (zh) * | 2011-03-08 | 2013-12-18 | 开曼群岛威睿电通股份有限公司 | 视频编解码器及运动估计方法 |
| JP5891388B2 (ja) * | 2011-03-31 | 2016-03-23 | パナソニックIpマネジメント株式会社 | 立体視画像の描画を行う画像描画装置、画像描画方法、画像描画プログラム |
| US9805475B2 (en) * | 2012-09-07 | 2017-10-31 | Massachusetts Institute Of Technology | Eulerian motion modulation |
| US9749627B2 (en) | 2013-04-08 | 2017-08-29 | Microsoft Technology Licensing, Llc | Control data for motion-constrained tile set |
| US20150195564A1 (en) * | 2014-01-03 | 2015-07-09 | Qualcomm Incorporated | Method for coding a reference picture set (rps) in multi-layer coding |
| US10404992B2 (en) | 2015-07-27 | 2019-09-03 | Qualcomm Incorporated | Methods and systems of restricting bi-prediction in video coding |
| US20170214937A1 (en) | 2016-01-22 | 2017-07-27 | Mediatek Inc. | Apparatus of Inter Prediction for Spherical Images and Cubic Images |
| FI20165256A7 (fi) | 2016-03-24 | 2017-09-25 | Nokia Technologies Oy | Laitteisto, menetelmä ja tietokoneohjelma videokoodaukseen ja -dekoodaukseen |
| US11019257B2 (en) * | 2016-05-19 | 2021-05-25 | Avago Technologies International Sales Pte. Limited | 360 degree video capture and playback |
| US20170374364A1 (en) | 2016-06-23 | 2017-12-28 | Mediatek Inc. | Method and Apparatus of Face Independent Coding Structure for VR Video |
| EP3301914A1 (en) | 2016-09-30 | 2018-04-04 | Thomson Licensing | Method and apparatus for encoding and decoding a large field of view video |
| US10609284B2 (en) * | 2016-10-22 | 2020-03-31 | Microsoft Technology Licensing, Llc | Controlling generation of hyperlapse from wide-angled, panoramic videos |
| EP3316212A1 (en) * | 2016-10-28 | 2018-05-02 | Thomson Licensing | Method for deblurring a video, corresponding device and computer program product |
| US10506196B2 (en) * | 2017-04-01 | 2019-12-10 | Intel Corporation | 360 neighbor-based quality selector, range adjuster, viewport manager, and motion estimator for graphics |
| WO2019002662A1 (en) * | 2017-06-26 | 2019-01-03 | Nokia Technologies Oy | APPARATUS, METHOD AND COMPUTER PROGRAM FOR OMNIDIRECTIONAL VIDEO |
| US11252434B2 (en) * | 2018-12-31 | 2022-02-15 | Tencent America LLC | Method for wrap-around padding for omnidirectional media coding |
| BR122021012456B1 (pt) * | 2019-01-15 | 2022-03-22 | Lg Electronics Inc | Método de decodificação de uma imagem realizado por um aparelho de decodificação, método de codificação de uma imagem realizado por um aparelho de codificação, aparelho de decodificação para decodificação de imagem, aparelho de codificação para codificação de imagem e mídia de armazenamento digital legível por computador não transitória |
-
2019
- 2019-09-24 TW TW108134379A patent/TWI822863B/zh active
- 2019-09-25 US US17/280,183 patent/US11601676B2/en active Active
- 2019-09-26 JP JP2021515214A patent/JP7551994B2/ja active Active
- 2019-09-26 WO PCT/US2019/053055 patent/WO2020069058A1/en not_active Ceased
- 2019-09-26 EP EP19783913.7A patent/EP3857895A1/en active Pending
- 2019-09-26 KR KR1020217009218A patent/KR102947561B1/ko active Active
- 2019-09-26 CN CN202411053401.3A patent/CN118890490A/zh active Pending
- 2019-09-26 BR BR112021005945-8A patent/BR112021005945A2/pt unknown
- 2019-09-26 KR KR1020267009872A patent/KR20260048366A/ko active Pending
- 2019-09-26 CN CN201980062285.2A patent/CN112740701B/zh active Active
-
2023
- 2023-02-03 US US18/105,290 patent/US12149739B2/en active Active
-
2024
- 2024-08-15 JP JP2024135664A patent/JP7825677B2/ja active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20060088191A1 (en) * | 2004-10-25 | 2006-04-27 | Tong Zhang | Video content understanding through real time video motion analysis |
| US20170085917A1 (en) * | 2015-09-23 | 2017-03-23 | Nokia Technologies Oy | Method, an apparatus and a computer program product for coding a 360-degree panoramic video |
| WO2018009746A1 (en) * | 2016-07-08 | 2018-01-11 | Vid Scale, Inc. | 360-degree video coding using geometry projection |
Non-Patent Citations (1)
| Title |
|---|
| 網路文獻 P. Hanhart et al AHG8: Horizontal geometry padding for PERP Joint Video Experts Team (JVET) of ITU-T SG 16 WP 3 and ISO/IEC JTC 1/SC 29/WG 1, 11th Meeting: Ljubljana, SI 10–18 July 2018 http://phenix.it-sudparis.eu/jvet/doc_end_user/current_meeting.php?id_meeting=175&search_id_group=1&search_sub_group=1 * |
Also Published As
| Publication number | Publication date |
|---|---|
| KR20260048366A (ko) | 2026-04-09 |
| US20220007053A1 (en) | 2022-01-06 |
| BR112021005945A2 (pt) | 2021-06-29 |
| EP3857895A1 (en) | 2021-08-04 |
| WO2020069058A1 (en) | 2020-04-02 |
| CN112740701A (zh) | 2021-04-30 |
| JP2024178160A (ja) | 2024-12-24 |
| TW202029763A (zh) | 2020-08-01 |
| US11601676B2 (en) | 2023-03-07 |
| CN112740701B (zh) | 2024-09-17 |
| JP7825677B2 (ja) | 2026-03-06 |
| KR20210080358A (ko) | 2021-06-30 |
| JP7551994B2 (ja) | 2024-09-18 |
| JP2022501905A (ja) | 2022-01-06 |
| CN118890490A (zh) | 2024-11-01 |
| KR102947561B1 (ko) | 2026-04-02 |
| US20230188752A1 (en) | 2023-06-15 |
| US12149739B2 (en) | 2024-11-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| TWI822863B (zh) | 360度視訊寫碼樣本導出 | |
| JP7357747B2 (ja) | 面連続性を使用する360度ビデオコーディング | |
| JP7553671B2 (ja) | 360度ビデオ符号化におけるフェイス不連続の処理 | |
| CN111713111B (zh) | 用于360度视频译码的面不连续性滤波 | |
| JP7406378B2 (ja) | 360度ビデオ符号化のための適応的量子化 | |
| TWI797234B (zh) | 360度視訊編碼適應性訊框填裝 | |
| WO2019089382A1 (en) | 360-degree video coding using face-based geometry padding | |
| CN110651476A (zh) | 基于几何图形填充的用于360度视频的预测编码 | |
| RU2786015C2 (ru) | Получение сэмпла для кодирования 360-градусного видео |