KR20210010172A - System and method for controlling cluster flight of unmanned aerial vehicle - Google Patents
System and method for controlling cluster flight of unmanned aerial vehicle Download PDFInfo
- Publication number
- KR20210010172A KR20210010172A KR1020190087738A KR20190087738A KR20210010172A KR 20210010172 A KR20210010172 A KR 20210010172A KR 1020190087738 A KR1020190087738 A KR 1020190087738A KR 20190087738 A KR20190087738 A KR 20190087738A KR 20210010172 A KR20210010172 A KR 20210010172A
- Authority
- KR
- South Korea
- Prior art keywords
- unmanned aerial
- aerial vehicle
- master
- group
- control system
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images








Classifications
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/10—Simultaneous control of position or course in three dimensions
- G05D1/101—Simultaneous control of position or course in three dimensions specially adapted for aircraft
- G05D1/104—Simultaneous control of position or course in three dimensions specially adapted for aircraft involving a plurality of aircrafts, e.g. formation flying
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/60—Intended control result
- G05D1/69—Coordinated control of the position or course of two or more vehicles
- G05D1/695—Coordinated control of the position or course of two or more vehicles for maintaining a fixed relative position of the vehicles, e.g. for convoy travelling or formation flight
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64C—AEROPLANES; HELICOPTERS
- B64C39/00—Aircraft not otherwise provided for
- B64C39/02—Aircraft not otherwise provided for characterised by special use
- B64C39/024—Aircraft not otherwise provided for characterised by special use of the remote controlled vehicle type, i.e. RPV
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64U—UNMANNED AERIAL VEHICLES [UAV]; EQUIPMENT THEREFOR
- B64U40/00—On-board mechanical arrangements for adjusting control surfaces or rotors; On-board mechanical arrangements for in-flight adjustment of the base configuration
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/0011—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots associated with a remote control arrangement
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/40—Control within particular dimensions
- G05D1/46—Control of position or course in three dimensions [3D]
-
- B64C2201/143—
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64U—UNMANNED AERIAL VEHICLES [UAV]; EQUIPMENT THEREFOR
- B64U2201/00—UAVs characterised by their flight controls
- B64U2201/10—UAVs characterised by their flight controls autonomous, i.e. by navigating independently from ground or air stations, e.g. by using inertial navigation systems [INS]
- B64U2201/102—UAVs characterised by their flight controls autonomous, i.e. by navigating independently from ground or air stations, e.g. by using inertial navigation systems [INS] adapted for flying in formations
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D2109/00—Types of controlled vehicles
- G05D2109/20—Aircraft, e.g. drones
Landscapes
- Engineering & Computer Science (AREA)
- Aviation & Aerospace Engineering (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Mechanical Engineering (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
- Traffic Control Systems (AREA)
Abstract
본 발명의 일 실시예에 따른 무인 비행체의 군집 비행 제어 시스템은 조작 신호를 수신하여 비행하는 마스터 무인 비행체, 및 상기 마스터 무인 비행체로부터 상기 조작 신호를 수신하여 비행하되 상기 마스터 무인 비행체를 기준으로 미리 설정된 위치를 유지하면서 비행하는 복수의 서브 무인 비행체를 포함하는 복수의 무인 비행체 그룹; 및 상기 복수의 무인 비행체 그룹 중 어느 하나의 무인 비행체 그룹을 마스터 그룹으로 선정하고 나머지 무인 비행체 그룹을 서브 그룹으로 선정하며, 상기 선정된 마스터 그룹에 상기 조작 신호를 전송하여 상기 마스터 그룹을 기준으로 상기 서브 그룹이 미리 설정된 포메이션(Formation)을 유지하도록 비행 제어를 수행하는 지상 관제 시스템을 포함한다.In the cluster flight control system of an unmanned aerial vehicle according to an embodiment of the present invention, a master unmanned aerial vehicle receiving an operation signal and flying, and a flight by receiving the operation signal from the master unmanned aerial vehicle are preset based on the master unmanned aerial vehicle. A plurality of unmanned aerial vehicle groups including a plurality of sub unmanned aerial vehicles flying while maintaining the position; And selecting any one of the plurality of unmanned aerial vehicle groups as a master group, and selecting the remaining unmanned aerial vehicle groups as a subgroup, and transmitting the operation signal to the selected master group to the master group. It includes a ground control system that performs flight control so that the subgroup maintains a preset formation.

Description
본 발명의 실시예들은 무인 비행체의 군집 비행 제어 시스템 및 방법에 관한 것이다.Embodiments of the present invention relate to a cluster flight control system and method of an unmanned aerial vehicle.
일반적으로, 드론은 무선 통신 방식을 통해 원격 제어되고, 군사용으로 개발되어 단순한 사격 연습에 사용되었으나, 전자 통신 기술의 지속적 발전에 따라 군사용뿐만 아니라 그 이외의 다양한 분야로 확대 보급되고 있다.In general, drones are remotely controlled through a wireless communication method, developed for military use, and used for simple shooting practice. However, according to the continuous development of electronic communication technology, drones have been expanded and spread not only to military use but also to various other fields.
예컨대 드론은 사람이 쉽게 접근할 수 없는 각종 재해나 사고 지역 또는 정글이나 오지 또는 화산 지역 등으로 투입되어, 현장의 상황 파악이나 인명 구조 또는 방송용 영상을 얻기 위하여 사용되기도 하고, 배송 회사에서 물품 수송의 상업적 목적으로 운용하거나, 감시 카메라를 대신하는 보안 및 관제 서비스에 적용되기도 한다.For example, drones are used in various disasters or accident areas, jungle, remote or volcanic areas that cannot be easily accessed by humans, and are used to understand the situation of the site, rescue lives, or obtain broadcast images. It is used for commercial purposes or applied to security and control services in place of surveillance cameras.
최근에는 드론의 일반화에 따라 개인들도 취미 생활을 목적으로 드론을 구입하기도 한다.In recent years, with the generalization of drones, individuals also purchase drones for hobby purposes.
이와 같은 드론의 일반적인 구성은, 양력을 출력하는 다수의 팬과, 상기 팬에 전력을 공급하는 배터리와 제어부로 이루어진다. 상기 팬은 배터리로부터 공급된 전력에 의해 회전력을 발생하는 모터와, 상기 모터의 구동축에 고정되는 프로펠러로 구성되는데, 필요에 따라 다수의 드론 비행이 요구되기도 한다.A typical configuration of such a drone includes a plurality of fans that output lift, a battery that supplies power to the fan, and a controller. The fan is composed of a motor that generates rotational force by power supplied from a battery, and a propeller fixed to a drive shaft of the motor, and a plurality of drones may be required to fly if necessary.
관련 선행기술로는 대한민국 공개특허공보 제10-2016-0142686호(발명의 명칭: 다수의 무인 비행체의 비행 스케줄 정보 생성 장치, 다수의 무인 비행체의 비행 제어 방법 및 무인 비행체, 공개일자: 2016.12.13)가 있다.As related prior art, Korean Patent Laid-Open Publication No. 10-2016-0142686 (title of the invention: a device for generating flight schedule information of a plurality of unmanned aerial vehicles, a flight control method and an unmanned aerial vehicle of a number of unmanned aerial vehicles, publication date: 2016.12. ).
본 발명의 일 실시예는 군집 비행 시 편대를 하나의 마스터 그룹과 여러 개의 서브 그룹으로 나누어 마스터 그룹을 기준으로 여러 개의 서브 그룹의 비행을 제어함으로써 보다 다양한 패턴으로 군집 비행의 편대를 구현할 수 있도록 하는 무인 비행체의 군집 비행 제어 시스템 및 방법을 제공한다.According to an embodiment of the present invention, when a squadron flight is performed, a squadron is divided into one master group and a plurality of subgroups, and the flight of several subgroups is controlled based on the master group, so that the formation of the squadron flight can be implemented with more various patterns It provides a cluster flight control system and method of an unmanned aerial vehicle.
본 발명이 해결하고자 하는 과제는 이상에서 언급한 과제(들)로 제한되지 않으며, 언급되지 않은 또 다른 과제(들)은 아래의 기재로부터 당업자에게 명확하게 이해될 수 있을 것이다.The problem to be solved by the present invention is not limited to the problem(s) mentioned above, and another problem(s) not mentioned will be clearly understood by those skilled in the art from the following description.
본 발명의 일 실시예에 따른 무인 비행체의 군집 비행 제어 시스템은 조작 신호를 수신하여 비행하는 마스터 무인 비행체, 및 상기 마스터 무인 비행체로부터 상기 조작 신호를 수신하여 비행하되 상기 마스터 무인 비행체를 기준으로 미리 설정된 위치를 유지하면서 비행하는 복수의 서브 무인 비행체를 포함하는 복수의 무인 비행체 그룹; 및 상기 복수의 무인 비행체 그룹 중 어느 하나의 무인 비행체 그룹을 마스터 그룹으로 선정하고 나머지 무인 비행체 그룹을 서브 그룹으로 선정하며, 상기 선정된 마스터 그룹에 상기 조작 신호를 전송하여 상기 마스터 그룹을 기준으로 상기 서브 그룹이 미리 설정된 포메이션(Formation)을 유지하도록 비행 제어를 수행하는 지상 관제 시스템을 포함한다.In the cluster flight control system of an unmanned aerial vehicle according to an embodiment of the present invention, a master unmanned aerial vehicle receiving an operation signal and flying, and a flight by receiving the operation signal from the master unmanned aerial vehicle are preset based on the master unmanned aerial vehicle. A plurality of unmanned aerial vehicle groups including a plurality of sub unmanned aerial vehicles flying while maintaining the position; And selecting any one of the plurality of unmanned aerial vehicle groups as a master group, and selecting the remaining unmanned aerial vehicle groups as a subgroup, and transmitting the operation signal to the selected master group to the master group. It includes a ground control system that performs flight control so that the subgroup maintains a preset formation.
상기 지상 관제 시스템은 상기 복수의 무인 비행체 그룹 각각에 포함된 마스터 무인 비행체와 무선 통신을 수행하여, 상기 마스터 무인 비행체 각각의 비행 정보 및 상기 마스터 무인 비행체 각각의 주변 환경 정보를 획득하고, 상기 비행 정보 및 상기 주변 환경 정보를 이용하여 상기 복수의 무인 비행체 그룹 중 어느 하나의 무인 비행체 그룹을 상기 마스터 그룹으로 선정할 수 있다.The ground control system performs wireless communication with the master unmanned aerial vehicle included in each of the plurality of unmanned aerial vehicle groups, thereby obtaining flight information of each of the master unmanned aerial vehicle and surrounding environment information of each of the master unmanned aerial vehicle, and the flight information And it is possible to select any one of the plurality of unmanned aerial vehicle groups as the master group using the surrounding environment information.
상기 마스터 그룹은 상기 지상 관제 시스템으로부터 상기 조작 신호를 수신하여 비행하는 제1-1 마스터 무인 비행체, 및 상기 제1-1 마스터 무인 비행체로부터 상기 조작 신호를 수신하여 비행하되 상기 제1-1 마스터 무인 비행체를 기준으로 미리 설정된 위치를 유지하면서 비행하는 복수의 제2-1 서브 무인 비행체를 포함하고, 상기 서브 그룹은 상기 제1-1 마스터 무인 비행체로부터 상기 조작 신호를 수신하여 비행하는 제1-2 마스터 무인 비행체, 및 상기 제1-2 마스터 무인 비행체로부터 상기 조작 신호를 수신하여 비행하되 상기 제1-2 마스터 무인 비행체를 기준으로 미리 설정된 위치를 유지하면서 비행하는 복수의 제2-2 서브 무인 비행체를 포함할 수 있다.The master group receives the manipulation signal from the ground control system and flies by receiving the manipulation signal from the 1-1 master unmanned aerial vehicle and the 1-1 master unmanned aerial vehicle. It includes a plurality of 2-1 sub unmanned aerial vehicle flying while maintaining a preset position with respect to the vehicle, and the sub group 1-2 receives the operation signal from the 1-1 master unmanned aerial vehicle and flies. Master unmanned aerial vehicle, and a plurality of 2-2 sub unmanned aerial vehicles flying while receiving the manipulation signal from the 1-2 master unmanned aerial vehicle while maintaining a preset position based on the 1-2 master unmanned aerial vehicle It may include.
상기 지상 관제 시스템은 상기 복수의 무인 비행체 그룹 전체의 움직임을 고려하여, 상기 마스터 그룹 및 상기 서브 그룹 내 무인 비행체의 개수, 비행 속도 및 비행 방향 중 적어도 하나를 변경하기 위한 그룹 재편 명령 신호를 생성하여 상기 제1-1 마스터 무인 비행체에 전송할 수 있다.The ground control system generates a group reorganization command signal for changing at least one of the number, flight speed, and flight direction of the master group and the subgroup in consideration of the movement of the entire group of unmanned aerial vehicles. It can be transmitted to the 1-1 master unmanned aerial vehicle.
상기 제1-1 마스터 무인 비행체는 상기 지상 관제 시스템으로부터 상기 그룹 재편 명령 신호를 수신하여 상기 마스터 그룹 내 무인 비행체의 개수, 비행 속도 및 비행 방향 중 적어도 하나를 변경하고, 상기 그룹 재편 명령 신호를 상기 제1-2 마스터 무인 비행체에 전송하며, 상기 제1-2 마스터 무인 비행체는 상기 제1-1 마스터 무인 비행체로부터 상기 그룹 재편 명령 신호를 수신하여 상기 서브 그룹 내 무인 비행체의 개수, 비행 속도 및 비행 방향 중 적어도 하나를 변경할 수 있다.The 1-1 master unmanned aerial vehicle receives the group reorganization command signal from the ground control system, changes at least one of the number, flight speed, and flight direction of unmanned aerial vehicles in the master group, and transmits the group reorganization command signal to the It is transmitted to the 1-2 master unmanned aerial vehicle, and the 1-2 master unmanned aerial vehicle receives the group reorganization command signal from the 1--1 master unmanned aerial vehicle, and the number of unmanned vehicles in the subgroup, flight speed and flight At least one of the directions can be changed.
상기 지상 관제 시스템은 상기 제1-1 및 제1-2 마스터 무인 비행체 각각의 오류 또는 포메이션 이탈을 진단하고, 상기 오류 또는 포메이션 이탈로 진단된 제1-1 또는 제1-2 마스터 무인 비행체의 임무 수행과 관련한 이력 정보를 데이터베이스로부터 획득하며, 상기 이력 정보를 동일 그룹 내 제2-1 및 제2-2 서브 무인 비행체 중 어느 하나에 전송하여, 상기 제1-1 또는 제1-2 마스터 무인 비행체의 임무를 상기 동일 그룹 내 제2-1 및 제2-2 서브 무인 비행체 중 어느 하나가 이어서 수행하도록 제어할 수 있다.The ground control system diagnoses the error or formation departure of each of the 1-1 and 1-2 master unmanned aerial vehicles, and the mission of the 1-1 or 1-2 master unmanned aerial vehicle diagnosed as the error or formation departure Acquires performance-related history information from a database, and transmits the history information to any one of the 2-1 and 2-2 sub unmanned vehicles in the same group, and the 1-1 or 1-2 master unmanned aerial vehicle It is possible to control the mission of any one of the 2-1 and 2-2 sub unmanned aerial vehicles in the same group to subsequently perform.
상기 지상 관제 시스템은 상기 동일 그룹 내 가장 인접한 서브 무인 비행체 또는 배터리 잔량이 가장 많은 서브 무인 비행체에 상기 이력 정보를 전송할 수 있다.The ground control system may transmit the history information to the nearest sub unmanned aerial vehicle or the sub unmanned aerial vehicle having the largest remaining battery capacity in the same group.
상기 지상 관제 시스템은 상기 제2-1 및 제2-2 서브 무인 비행체 각각의 오류 또는 포메이션 이탈을 진단하고, 상기 진단 결과 상기 오류 또는 포메이션 이탈이 확인된 경우, 상기 마스터 그룹 내 제2-1 서브 무인 비행체 또는 상기 서브 그룹 내 제2-2 서브 무인 비행체의 개수, 비행 속도 및 비행 방향 중 적어도 하나를 변경하기 위한 그룹 재편 명령 신호를 생성하여 상기 제1-1 또는 제1-2 마스터 무인 비행체에 전송할 수 있다.The ground control system diagnoses an error or formation departure of each of the 2-1 and 2-2 sub unmanned aerial vehicles, and when the error or formation departure is confirmed as a result of the diagnosis, the 2-1 sub in the master group Generate a group reorganization command signal for changing at least one of the number, flight speed, and flight direction of the unmanned aerial vehicle or the 2-2 sub unmanned aerial vehicle in the sub-group to the 1-1 or 1-2 master unmanned aerial vehicle Can be transmitted.
본 발명의 일 실시예에 따른 무인 비행체의 군집 비행 제어 방법은 상기 지상 관제 시스템이 상기 복수의 무인 비행체 그룹 중 어느 하나의 무인 비행체 그룹을 마스터 그룹으로 선정하는 단계; 상기 지상 관제 시스템이 상기 마스터 그룹을 제외한 나머지 무인 비행체 그룹을 서브 그룹으로 선정하는 단계; 및 상기 지상 관제 시스템이 상기 선정된 마스터 그룹에 상기 조작 신호를 전송하여 상기 마스터 그룹을 기준으로 상기 서브 그룹이 미리 설정된 포메이션(Formation)을 유지하도록 비행 제어를 수행하는 단계를 포함한다.A method for controlling a cluster flight of an unmanned aerial vehicle according to an embodiment of the present invention includes the steps of: selecting, by the ground control system, an unmanned aerial vehicle group from among the plurality of unmanned aerial vehicle groups as a master group; Selecting, by the ground control system, a group of unmanned aerial vehicles other than the master group as a subgroup; And performing flight control so that the subgroup maintains a preset formation based on the master group by transmitting the manipulation signal to the selected master group by the ground control system.
상기 마스터 그룹으로 선정하는 단계는 상기 지상 관제 시스템이 상기 복수의 무인 비행체 그룹 각각에 포함된 마스터 무인 비행체와 무선 통신을 수행하여, 상기 마스터 무인 비행체 각각의 비행 정보 및 상기 마스터 무인 비행체 각각의 주변 환경 정보를 획득하는 단계; 및 상기 지상 관제 시스템이 상기 비행 정보 및 상기 주변 환경 정보를 이용하여 상기 복수의 무인 비행체 그룹 중 어느 하나의 무인 비행체 그룹을 상기 마스터 그룹으로 선정하는 단계를 포함할 수 있다.The step of selecting the master group includes the ground control system performing wireless communication with the master unmanned aerial vehicle included in each of the plurality of unmanned aerial vehicle groups, and the flight information of each of the master unmanned aerial vehicle and the surrounding environment of each of the master unmanned aerial vehicle Obtaining information; And selecting, by the ground control system, one of the plurality of unmanned aerial vehicle groups as the master group using the flight information and the surrounding environment information.
상기 마스터 그룹은 상기 지상 관제 시스템으로부터 상기 조작 신호를 수신하여 비행하는 제1-1 마스터 무인 비행체, 및 상기 제1-1 마스터 무인 비행체로부터 상기 조작 신호를 수신하여 비행하되 상기 제1-1 마스터 무인 비행체를 기준으로 미리 설정된 위치를 유지하면서 비행하는 복수의 제2-1 서브 무인 비행체를 포함하고, 상기 서브 그룹은 상기 제1-1 마스터 무인 비행체로부터 상기 조작 신호를 수신하여 비행하는 제1-2 마스터 무인 비행체, 및 상기 제1-2 마스터 무인 비행체로부터 상기 조작 신호를 수신하여 비행하되 상기 제1-2 마스터 무인 비행체를 기준으로 미리 설정된 위치를 유지하면서 비행하는 복수의 제2-2 서브 무인 비행체를 포함할 수 있다.The master group receives the manipulation signal from the ground control system and flies by receiving the manipulation signal from the 1-1 master unmanned aerial vehicle and the 1-1 master unmanned aerial vehicle. It includes a plurality of 2-1 sub unmanned aerial vehicle flying while maintaining a preset position with respect to the vehicle, and the sub group 1-2 receives the operation signal from the 1-1 master unmanned aerial vehicle and flies. Master unmanned aerial vehicle, and a plurality of 2-2 sub unmanned aerial vehicles flying while receiving the manipulation signal from the 1-2 master unmanned aerial vehicle while maintaining a preset position based on the 1-2 master unmanned aerial vehicle It may include.
본 발명의 일 실시예에 따른 무인 비행체의 군집 비행 제어 방법은 상기 지상 관제 시스템이 상기 복수의 무인 비행체 그룹 전체의 움직임을 고려하여, 상기 마스터 그룹 및 상기 서브 그룹 내 무인 비행체의 개수, 비행 속도 및 비행 방향 중 적어도 하나를 변경하기 위한 그룹 재편 명령 신호를 생성하여 상기 제1 마스터 무인 비행체에 전송하는 단계를 더 포함할 수 있다.In the cluster flight control method of an unmanned aerial vehicle according to an embodiment of the present invention, the ground control system considers the movement of the entire plurality of unmanned aerial vehicle groups, the number of unmanned aerial vehicles in the master group and the sub-group, flight speed, and It may further include generating a group reorganization command signal for changing at least one of the flight directions and transmitting the signal to the first master unmanned aerial vehicle.
본 발명의 일 실시예에 따른 무인 비행체의 군집 비행 제어 방법은 상기 제1-1 마스터 무인 비행체가 상기 지상 관제 시스템으로부터 상기 그룹 재편 명령 신호를 수신하여 상기 마스터 그룹 내 무인 비행체의 개수, 비행 속도 및 비행 방향 중 적어도 하나를 변경하는 단계; 상기 제1-1 마스터 무인 비행체가 상기 그룹 재편 명령 신호를 상기 제1-2 마스터 무인 비행체에 전송하는 단계; 및 상기 제1-2 마스터 무인 비행체가 상기 제1-1 마스터 무인 비행체로부터 상기 그룹 재편 명령 신호를 수신하여 상기 서브 그룹 내 무인 비행체의 개수, 비행 속도 및 비행 방향 중 적어도 하나를 변경하는 단계를 더 포함할 수 있다.In the cluster flight control method of an unmanned aerial vehicle according to an embodiment of the present invention, the 1-1 master unmanned aerial vehicle receives the group reorganization command signal from the ground control system, and the number of unmanned aerial vehicles in the master group, flight speed, and Changing at least one of the flight directions; Transmitting, by the first-1st master unmanned aerial vehicle, the group reorganization command signal to the 1-2th master unmanned aerial vehicle; And changing at least one of the number of unmanned aerial vehicles in the subgroup, flight speed, and flight direction by the 1-2 master unmanned aerial vehicle receiving the group reorganization command signal from the 1--1 master unmanned aerial vehicle. Can include.
본 발명의 일 실시예에 따른 무인 비행체의 군집 비행 제어 방법은 상기 지상 관제 시스템이 상기 제1-1 및 제1-2 마스터 무인 비행체 각각의 오류 또는 포메이션 이탈을 진단하는 단계; 상기 지상 관제 시스템이 상기 오류 또는 포메이션 이탈로 진단된 제1-1 또는 제1-2 마스터 무인 비행체의 임무 수행과 관련한 이력 정보를 데이터베이스로부터 획득하는 단계; 및 상기 지상 관제 시스템이 상기 이력 정보를 동일 그룹 내 제2-1 및 제2-2 서브 무인 비행체 중 어느 하나에 전송하여, 상기 제1-1 또는 제1-2 마스터 무인 비행체의 임무를 상기 동일 그룹 내 제2-1 및 제2-2 서브 무인 비행체 중 어느 하나가 이어서 수행하도록 제어하는 단계를 더 포함할 수 있다.A method for controlling a cluster flight of an unmanned aerial vehicle according to an embodiment of the present invention includes the steps of: diagnosing, by the ground control system, errors or formation departures of each of the 1-1 and 1-2 master unmanned aerial vehicles; Obtaining, by the ground control system, history information related to the mission performance of the 1-1 or 1-2 master unmanned aerial vehicle diagnosed as the error or formation departure from a database; And the ground control system transmits the history information to any one of the 2-1 and 2-2 sub unmanned aerial vehicles in the same group, so that the mission of the 1-1 or 1-2 master unmanned aerial vehicle is the same. It may further include the step of controlling any one of the 2-1 and 2-2 sub unmanned aerial vehicle in the group to be subsequently performed.
상기 지상 관제 시스템은 상기 동일 그룹 내 가장 인접한 서브 무인 비행체 또는 배터리 잔량이 가장 많은 서브 무인 비행체에 상기 이력 정보를 전송할 수 있다.The ground control system may transmit the history information to the nearest sub unmanned aerial vehicle or the sub unmanned aerial vehicle having the largest remaining battery capacity in the same group.
본 발명의 일 실시예에 따른 무인 비행체의 군집 비행 제어 방법은 상기 지상 관제 시스템이 상기 제2-1 및 제2-2 서브 무인 비행체 각각의 오류 또는 포메이션 이탈을 진단하는 단계; 및 상기 진단 결과 상기 오류 또는 포메이션 이탈이 확인된 경우, 상기 지상 관제 시스템이 상기 마스터 그룹 내 제2-1 서브 무인 비행체 또는 상기 서브 그룹 내 제2-2 서브 무인 비행체의 개수, 비행 속도 및 비행 방향 중 적어도 하나를 변경하기 위한 그룹 재편 명령 신호를 생성하여 상기 제1-1 또는 제1-2 마스터 무인 비행체에 전송하는 단계를 더 포함할 수 있다.A method for controlling a cluster flight of an unmanned aerial vehicle according to an embodiment of the present invention includes the steps of: diagnosing, by the ground control system, an error or formation departure of each of the 2-1 and 2-2 sub unmanned aerial vehicles; And when the error or formation deviation is confirmed as a result of the diagnosis, the ground control system includes the number, flight speed and direction of the 2-1 sub-unmanned vehicle in the master group or the 2-2 sub-unmanned vehicle in the sub-group. It may further include the step of generating a group reorganization command signal for changing at least one of the 1-1 or 1-2 master unmanned aerial vehicle.
기타 실시예들의 구체적인 사항들은 상세한 설명 및 첨부 도면들에 포함되어 있다.Details of other embodiments are included in the detailed description and accompanying drawings.
본 발명의 일 실시예에 따르면, 군집 비행 시 편대를 하나의 마스터 그룹과 여러 개의 서브 그룹으로 나누어 마스터 그룹을 기준으로 여러 개의 서브 그룹의 비행을 제어함으로써 보다 다양한 패턴으로 군집 비행의 편대를 구현할 수 있다.According to an embodiment of the present invention, when flying in a swarm, a formation of a swarm flight can be implemented in a more diverse pattern by dividing the squadron into one master group and several subgroups and controlling the flight of several subgroups based on the master group. have.
본 발명의 일 실시예에 따르면, 마스터 그룹의 비행 제어만으로도 다수의 서브 그룹이 마스터 그룹을 기준으로 일정한 위치를 유지하도록 비행 제어를 함으로써, 편대 비행의 신뢰성 및 정확성을 높일 수 있고, 다양한 형태의 편대로 용이하게 변경할 수 있다.According to an embodiment of the present invention, by controlling the flight of a plurality of subgroups to maintain a certain position based on the master group only by controlling the flight of the master group, it is possible to increase the reliability and accuracy of squadron flight, and various types of squadrons. Can be easily changed to.
도 1은 본 발명의 일 실시예에 따른 무인 비행체의 군집 비행 제어 시스템을 설명하기 위해 도시한 전체 구성도이다.
도 2는 도 1의 마스터 무인 비행체의 상세 구성을 설명하기 위해 도시한 블록도이다.
도 3은 도 1의 서브 무인 비행체의 상세 구성을 설명하기 위해 도시한 블록도이다.
도 4는 도 1의 지상 관제 센터를 설명하기 위한 상세 구성의 일례를 도시한 블록도이다.
도 5는 도 1의 지상 관제 시스템을 설명하기 위한 상세 구성의 다른 예를 도시한 블록도이다.
도 6은 본 발명의 일 실시예에 있어서 그룹 재편 명령에 따라 마스터 그룹 및 서브 그룹에 대한 그룹 재편의 일례를 나타낸 도면이다.
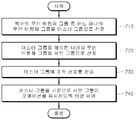
도 7 및 도 8은 본 발명의 일 실시예에 따른 무인 비행체의 군집 비행 제어 방법을 설명하기 위해 도시한 흐름도이다.
도 9는 본 발명의 일 실시예에 따라 마스터 그룹 및 서브 그룹에 대해 그룹 재편을 수행하는 과정을 설명하기 위해 도시한 흐름도이다.1 is an overall configuration diagram illustrating a cluster flight control system of an unmanned aerial vehicle according to an embodiment of the present invention.
FIG. 2 is a block diagram illustrating a detailed configuration of the master unmanned aerial vehicle of FIG. 1.
3 is a block diagram illustrating a detailed configuration of the sub unmanned aerial vehicle of FIG. 1.
4 is a block diagram showing an example of a detailed configuration for describing the ground control center of FIG. 1.
5 is a block diagram illustrating another example of a detailed configuration for describing the ground control system of FIG. 1.
6 is a diagram illustrating an example of group reorganization for a master group and a subgroup according to a group reorganization command according to an embodiment of the present invention.
7 and 8 are flowcharts illustrating a method of controlling a cluster flight of an unmanned aerial vehicle according to an embodiment of the present invention.
9 is a flowchart illustrating a process of performing group reorganization for a master group and a subgroup according to an embodiment of the present invention.
본 발명의 이점 및/또는 특징, 그리고 그것들을 달성하는 방법은 첨부되는 도면과 함께 상세하게 후술되어 있는 실시예들을 참조하면 명확해질 것이다. 그러나, 본 발명은 이하에서 개시되는 실시예들에 한정되는 것이 아니라 서로 다른 다양한 형태로 구현될 것이며, 단지 본 실시예들은 본 발명의 개시가 완전하도록 하며, 본 발명이 속하는 기술분야에서 통상의 지식을 가진 자에게 발명의 범주를 완전하게 알려주기 위해 제공되는 것이며, 본 발명은 청구항의 범주에 의해 정의될 뿐이다. 명세서 전체에 걸쳐 동일 참조 부호는 동일 구성요소를 지칭한다.Advantages and/or features of the present invention, and a method of achieving them will become apparent with reference to the embodiments described later in detail together with the accompanying drawings. However, the present invention is not limited to the embodiments disclosed below, but will be implemented in a variety of different forms, only these embodiments make the disclosure of the present invention complete, and common knowledge in the technical field to which the present invention pertains. It is provided to completely inform the scope of the invention to those who have, and the invention is only defined by the scope of the claims. The same reference numerals refer to the same elements throughout the specification.
또한, 이하 실시되는 본 발명의 바람직한 실시예는 본 발명을 이루는 기술적 구성요소를 효율적으로 설명하기 위해 각각의 시스템 기능구성에 기 구비되어 있거나, 또는 본 발명이 속하는 기술분야에서 통상적으로 구비되는 시스템 기능 구성은 가능한 생략하고, 본 발명을 위해 추가적으로 구비되어야 하는 기능 구성을 위주로 설명한다. 만약 본 발명이 속하는 기술분야에서 통상의 지식을 가진 자라면, 하기에 도시하지 않고 생략된 기능 구성 중에서 종래에 기 사용되고 있는 구성요소의 기능을 용이하게 이해할 수 있을 것이며, 또한 상기와 같이 생략된 구성 요소와 본 발명을 위해 추가된 구성 요소 사이의 관계도 명백하게 이해할 수 있을 것이다.In addition, a preferred embodiment of the present invention to be implemented below is already provided in each system functional configuration in order to efficiently describe the technical components constituting the present invention, or system functions commonly provided in the technical field to which the present invention belongs. The configuration will be omitted as much as possible, and a functional configuration that should be additionally provided for the present invention will be mainly described. If a person of ordinary skill in the art to which the present invention belongs will be able to easily understand the functions of components previously used among functional configurations that are not shown below and are omitted, the configuration omitted as described above. The relationship between the elements and the components added for the present invention will also be clearly understood.
또한, 이하의 설명에 있어서, 신호 또는 정보의 "전송", "통신", "송신", "수신" 기타 이와 유사한 의미의 용어는 일 구성요소에서 다른 구성요소로 신호 또는 정보가 직접 전달되는 것뿐만이 아니라 다른 구성요소를 거쳐 전달되는 것도 포함한다. 특히 신호 또는 정보를 일 구성요소로 "전송" 또는 "송신"한다는 것은 그 신호 또는 정보의 최종 목적지를 지시하는 것이고 직접적인 목적지를 의미하는 것이 아니다. 이는 신호 또는 정보의 "수신"에 있어서도 동일하다.In addition, in the following description, "transmission", "communication", "transmission", "receive" of a signal or information, and other terms with similar meanings refer to direct transmission of signals or information from one component to another. Not only that, but it includes things that are passed through other components. In particular, "transmitting" or "transmitting" a signal or information to a component indicates the final destination of the signal or information and does not imply a direct destination. The same is true for "reception" of signals or information.
이하에서는 첨부된 도면을 참조하여 본 발명의 실시예들을 상세히 설명하기로 한다.Hereinafter, embodiments of the present invention will be described in detail with reference to the accompanying drawings.
도 1은 본 발명의 일 실시예에 따른 무인 비행체의 군집 비행 제어 시스템을 설명하기 위해 도시한 전체 구성도이다.1 is an overall configuration diagram illustrating a cluster flight control system of an unmanned aerial vehicle according to an embodiment of the present invention.
도 1을 참조하면, 본 발명의 일 실시예에 따른 무인 비행체의 군집 비행 제어 시스템(100)은 복수의 무인 비행체 그룹(110, 120) 및 지상 관제 시스템(130)을 포함하여 구성될 수 있다.Referring to FIG. 1, a cluster
상기 복수의 무인 비행체 그룹(110, 120)은 상기 지상 관제 시스템(130)으로부터 전송된 조작 신호를 직접 또는 간접적으로 수신하고, 상기 수신된 조작 신호에 상응하도록 비행하는 마스터 무인 비행체(111, 121), 및 상기 마스터 무인 비행체(111, 121)로부터 상기 조작 신호를 수신하여 비행하되, 상기 마스터 무인 비행체(111, 121)를 기준으로 미리 설정된 위치를 유지하면서 비행하는 복수의 서브 무인 비행체(112, 122)를 포함할 수 있다.The plurality of unmanned aerial vehicle groups (110, 120) directly or indirectly receives the manipulation signal transmitted from the
상기 복수의 무인 비행체 그룹(110, 120)은 마스터 그룹(110) 및 서브 그룹(120)으로 구분될 수 있다. 참고로, 상기 무인 비행체(111, 112, 121, 122)는 무선 전파의 유도에 의하여 비행 및 조종이 가능한 비행기나 헬리콥터 모양의 무인 항공기로서, 통상적으로 드론(drone)으로 알려져 있지만, 본 발명에서 상기 무인 비행체(111, 112, 121, 122)는 상기 드론뿐만 아니라 상기 드론을 동력원으로 하는 풍등(風燈, Sky lanterns)을 포함하는 개념으로 이해될 수 있다.The plurality of unmanned
상기 마스터 그룹(110)은 상기 지상 관제 시스템(130)으로부터 상기 조작 신호를 수신하여 비행하는 제1-1 마스터 무인 비행체(111), 및 상기 제1-1 마스터 무인 비행체(111)로부터 상기 조작 신호를 수신하여 비행하되 상기 제1-1 마스터 무인 비행체(111)를 기준으로 미리 설정된 위치를 유지하면서 비행하는 복수의 제2-1 서브 무인 비행체(112)를 포함하여 구성될 수 있다.The
상기 서브 그룹(120)은 상기 제1-1 마스터 무인 비행체(111)로부터 상기 조작 신호를 수신하여 비행하는 제1-2 마스터 무인 비행체(121), 및 상기 제1-2 마스터 무인 비행체(121)로부터 상기 조작 신호를 수신하여 비행하되 상기 제1-2 마스터 무인 비행체(121)를 기준으로 미리 설정된 위치를 유지하면서 비행하는 복수의 제2-2 서브 무인 비행체(122)를 포함하여 구성될 수 있다.The
상기 지상 관제 시스템(130)은 상기 복수의 무인 비행체 그룹(110, 120) 중 어느 하나의 무인 비행체 그룹을 마스터 그룹(110)으로 선정하고 나머지 무인 비행체 그룹을 서브 그룹(120)으로 선정할 수 있다.The
즉, 상기 지상 관제 시스템(130)은 상기 복수의 무인 비행체 그룹(110, 120) 각각에 포함된 마스터 무인 비행체(111, 121)와 무선 통신을 수행하여, 상기 마스터 무인 비행체(111, 121) 각각의 비행 정보 및 상기 마스터 무인 비행체(111, 121) 각각의 주변 환경 정보를 획득할 수 있다. 상기 지상 관제 시스템(130)은 상기 비행 정보 및 상기 주변 환경 정보를 이용하여 상기 복수의 무인 비행체 그룹(110, 120) 중 어느 하나의 무인 비행체 그룹을 상기 마스터 그룹(110)으로 선정하고 나머지 무인 비행체 그룹을 서브 그룹(120)으로 선정할 수 있다.That is, the
상기 지상 관제 시스템(130)은 상기 선정된 마스터 그룹(110)에 상기 조작 신호를 전송하여 상기 마스터 그룹(110)을 기준으로 상기 서브 그룹(120)이 미리 설정된 포메이션(Formation)을 유지하도록 비행 제어를 수행할 수 있다.The
다시 말해, 상기 지상 관제 시스템(130)은 각 무인 비행체 그룹(110, 120) 내 무인 비행체들(111, 112, 121, 122)의 군집 비행을 제어할 수 있을 뿐만 아니라, 상기 각 무인 비행체 그룹(110, 120)에 대해서도 상기 마스터 그룹(110)을 기준으로 상기 서브 그룹(120)의 포메이션을 유지하여 그룹 군집 비행을 제어할 수도 있다.In other words, the
상기 지상 관제 시스템(130)은 상기 복수의 무인 비행체 그룹(110, 120) 전체의 움직임을 고려하여, 상기 마스터 그룹(110) 및 상기 서브 그룹(120) 내 무인 비행체(111, 112, 121, 122)의 개수, 비행 속도 및 비행 방향 등을 변경하기 위한 그룹 재편 명령 신호를 생성하고, 상기 생성된 그룹 재편 명령 신호를 상기 제1-1 마스터 무인 비행체(111)에 전송할 수 있다.The
그러면, 상기 제1-1 마스터 무인 비행체(111)는 상기 지상 관제 시스템(130)으로부터 상기 그룹 재편 명령 신호를 수신하여, 도 6에 도시된 바와 같이 상기 마스터 그룹(110) 내 무인 비행체(111, 112)의 개수, 비행 속도 및 비행 방향 등을 변경할 수 있다. 그리고, 상기 제1-1 마스터 무인 비행체(111)는 상기 그룹 재편 명령 신호를 상기 제1-2 마스터 무인 비행체(121)에 전송할 수 있다.Then, the 1-1 master unmanned
이에 따라, 상기 제1-2 마스터 무인 비행체(121)는 상기 제1-1 마스터 무인 비행체(111)로부터 상기 그룹 재편 명령 신호를 수신하여, 도 6에 도시된 바와 같이 상기 서브 그룹(120) 내 무인 비행체(121, 122)의 개수, 비행 속도 및 비행 방향 등을 변경할 수 있다.Accordingly, the 1-2 master unmanned
이와 같이 동일 그룹(110, 120) 내 무인 비행체(111, 112, 121, 122)의 개수, 비행 속도 및 비행 방향을 변경할 뿐만 아니라, 도 6에 도시된 바와 같이 상황(풍속, 풍향 등과 같은 기후 조건 등)에 따라 기존 서브 그룹(120)을 새로운 마스터 그룹(110)으로, 기존 마스터 그룹(110)을 서브 그룹(120)으로 변경할 수도 있다. 이러한 경우, 상기 지상 관제 시스템(130)은 기존 서브 그룹(120)의 제1-2 마스터 무인 비행체(121)를 새로운 제1-1 마스터 무인 비행체(111)로 변경하고 기존 제1-1 마스터 무인 비행체(111)를 제1-2 마스터 무인 비행체(121)로 변경할 수 있다.In this way, the number of unmanned aerial vehicles (111, 112, 121, 122) in the same group (110, 120), as well as changing the flight speed and flight direction, as shown in Figure 6, climate conditions such as wind speed, wind direction, etc. Etc.), the existing
한편, 상기 지상 관제 시스템(130)은 상기 제1-1 및 제1-2 마스터 무인 비행체(111, 121) 각각의 오류 또는 포메이션 이탈을 진단할 수 있다. 상기 지상 관제 시스템(130)은 상기 오류 또는 포메이션 이탈로 진단된 제1-1 또는 제1-2 마스터 무인 비행체(111, 121)의 임무 수행과 관련한 이력 정보를 데이터베이스(미도시)로부터 획득할 수 있다. 참고로, 상기 데이터베이스에는 상기 무인 비행체들(111, 112, 121, 122)의 임무 수행과 관련한 이력 정보가 저장되어 있으며, 그 이력 정보는 지속적으로 업데이트될 수 있다.Meanwhile, the
상기 지상 관제 시스템(130)은 상기 이력 정보를 동일 그룹(110, 120) 내 제2-1 및 제2-2 서브 무인 비행체(112, 122) 중 어느 하나에 전송하여, 상기 제1-1 또는 제1-2 마스터 무인 비행체(111, 121)의 임무를 상기 동일 그룹(110, 120) 내 제2-1 및 제2-2 서브 무인 비행체(112, 122) 중 어느 하나가 이어서 수행하도록 제어할 수 있다.The
이때, 상기 지상 관제 시스템(130)은 상기 동일 그룹(110, 120) 내 가장 인접한 서브 무인 비행체(112, 122) 또는 배터리 잔량이 가장 많은 서브 무인 비행체(112, 122)에 상기 이력 정보를 전송할 수 있다. 이는 해당 서브 무인 비행체(112, 122)로 하여금 상기 제1-1 또는 제1-2 마스터 무인 비행체(111, 121)의 임무를 보다 안정적으로 이어서 할 수 있도록 하기 위함이다.At this time, the
상기 지상 관제 시스템(130)은 상기 제2-1 및 제2-2 서브 무인 비행체(112, 122) 각각의 오류 또는 포메이션 이탈을 진단할 수도 있다. 상기 진단 결과 상기 오류 또는 포메이션 이탈이 확인된 경우, 상기 지상 관제 시스템(130)은 상기 마스터 그룹(110) 내 제2-1 서브 무인 비행체(111) 또는 상기 서브 그룹(120) 내 제2-2 서브 무인 비행체(122)의 개수, 비행 속도 및 비행 방향 등을 변경하기 위한 그룹 재편 명령 신호를 생성할 수 있다. 상기 지상 관제 시스템(130)은 상기 생성된 그룹 재편 명령 신호를 상기 제1-1 또는 제1-2 마스터 무인 비행체(111, 121)에 전송할 수 있다.The
도 2는 도 1의 마스터 무인 비행체(111, 121)의 상세 구성을 설명하기 위해 도시한 블록도이다.2 is a block diagram illustrating the detailed configuration of the master unmanned
도 1 및 도 2를 참조하면, 상기 마스터 무인 비행체(111, 121)는 제1 무선 통신부(210), 제1 운행 센서부(220), 제1 카메라(230), 제1 조명(240), 제1 마이크로폰(250), 제1 위치 감지부(260), 제1 비행 제어부(270), 제1 저장부(280), 제1 전원 공급부(290), 및 제1 구동부(295)를 포함하여 구성될 수 있다.1 and 2, the master unmanned
상기 마스터 무인 비행체(111, 121)는 비행에 필요한 데이터를 상기 제1 운항 센서부(220)로부터 획득하고, 외부의 영상을 상기 제1 카메라(230)에 의해 획득할 수 있다. 상기 마스터 무인 비행체(111, 121)는 상기 제1 운항 센서부(220)로부터 비행 데이터를 제공받고, 상기 제1 비행 제어부(270)를 통해 상기 제1 무선 통신부(210)에 의해 수신되는 조작 신호에 상응하는 제어 신호를 출력할 수 있다.The master unmanned
여기서, 상기 제1 비행 제어부(270)는 상기 제1 카메라(230)를 통해서 획득되는 영상을 상기 제1 무선 통신부(210)를 통해 송신하도록 제어하고, 아울러 상기 제1 무선 통신부(210)에 의해 수신되는 조작 신호와 상기 제1 위치 감지부(260)에 의해 획득되는 자신의 위치 데이터를 송신하도록 제어할 수 있다.Here, the first
상기 마스터 무인 비행체(111, 121)는 상기 제1 비행 제어부(270)의 제어 신호에 의해 각각 제어되는 다수의 제1 구동부(295)를 통해 프로펠러의 회전을 제어하여 비행 및 방향 전환에 필요한 추진력을 발생시킬 수 있으며, 상기 제1 전원 공급부(290)를 통해 동작에 필요한 전원이 공급되도록 할 수 있다.The master unmanned aerial vehicle (111, 121) controls the rotation of the propeller through a plurality of first driving units (295) respectively controlled by the control signal of the first
여기서, 상기 제1 운항 센서부(220)는 비행의 제어에 필요한 속도, 자세나 기울기, 주변 장애물 등을 검출하기 위한 단일 또는 다수의 센서를 포함할 수 있다. 상기 제1 무선 통신부(210)는 Wi-Fi나 블루투스 또는 각종 RF 신호를 비롯하여 무선 통신을 가능하도록 하는 다양한 통신 방식을 이용하여 구현될 수 있다.Here, the first
또한, 상기 제1 위치 감지부(260)는 상기 마스터 무인 비행체(111, 121) 각각의 현재 위치에 대한 데이터 획득을 위하여, 인공위성에서 발생되는 전파를 수신하여 자신의 위치를 산출하는 GPS, 고도 측정을 위한 고도계 등을 포함할 수 있으며, 나아가서는 3차원 위치 센서 등을 더 포함할 수 있다. 상기 제1 구동부(295)는 프로펠러가 축에 고정되는 모터를 포함할 수 있다. 상기 제1 전원 공급부(290)는 충전이 가능한 충전지로 구현될 수 있으며 또 달리 일반적인 건전지로 구현될 수도 있다.In addition, the first
상기 마스터 무인 비행체(111, 121)는 상기 제1 조명(240)을 통해 상기 제1 카메라(230)의 촬영 영역에 광을 조사할 수 있으며, 상기 제1 마이크로폰(250)을 통해 외부의 오디오를 수집하여 이를 영상과 함께 또는 별도의 데이터로 제공할 수 있다. 또한, 상기 마스터 무인 비행체(111, 121)는 획득되는 각종 데이터, 설정값, 동작에 필요한 데이터나 프로그램 등을 상기 제1 저장부(280)에 저장할 수 있다.The master unmanned
도 3은 도 1의 서브 무인 비행체(112, 122)의 상세 구성을 설명하기 위해 도시한 블록도이다.3 is a block diagram illustrating a detailed configuration of the sub unmanned
도 1 및 도 3을 참조하면, 상기 서브 무인 비행체(112, 122)는 제2 무선 통신부(310), 제2 운행 센서부(320), 제2 카메라(330), 제2 조명(340), 제2 마이크로폰(350), 제2 위치 감지부(360), 제2 비행 제어부(370), 제2 저장부(380), 제2 전원 공급부(390), 및 제2 구동부(395)를 포함하여 구성될 수 있다.1 and 3, the sub unmanned
도 3을 참조하면, 상기 서브 무인 비행체(112, 122)는 비행에 필요한 데이터를 상기 제2 운항 센서부(320)로부터 획득하고, 외부의 영상을 상기 제2 카메라(330)에 의해 획득할 수 있다. 상기 서브 무인 비행체(112, 122)는 상기 제2 운항 센서부(320)로부터 비행 데이터를 제공받고, 상기 제2 비행 제어부(370)를 통해 상기 제2 무선 통신부(310)에 의해 수신되는 조작 신호에 상응하는 제어 신호를 출력할 수 있다.Referring to FIG. 3, the sub unmanned
여기서, 상기 제2 비행 제어부(370)는 상기 제2 카메라(330)를 통해서 획득되는 영상을 상기 제2 무선 통신부(310)를 통해 송신하도록 제어하고, 아울러 상기 제2 무선 통신부(310)에 의해 수신되는 조작 신호와 상기 제2 위치 감지부(360)에 의해 획득되는 자신의 위치 데이터를 송신하도록 제어할 수 있다.Here, the second
상기 서브 무인 비행체(112, 122)는 상기 제2 비행 제어부(370)의 제어 신호에 의해 각각 제어되는 다수의 제2 구동부(395)를 통해 프로펠러의 회전을 제어하여 비행 및 방향 전환에 필요한 추진력을 발생시킬 수 있으며, 상기 제2 전원 공급부(390)를 통해 동작에 필요한 전원이 공급되도록 할 수 있다.The sub unmanned aerial vehicle (112, 122) controls the rotation of the propeller through a plurality of second driving units (395) respectively controlled by the control signal of the second flight control unit (370) to control the propulsion force required for flight and direction change. It may be generated, and power required for operation may be supplied through the second
여기서, 상기 제2 운항 센서부(320)는 비행의 제어에 필요한 속도, 자세나 기울기, 주변 장애물 등을 검출하기 위한 단일 또는 다수의 센서를 포함할 수 있다. 상기 제2 무선 통신부(310)는 Wi-Fi나 블루투스 또는 각종 RF 신호를 비롯하여 무선 통신을 가능하도록 하는 다양한 통신 방식을 이용하여 구현될 수 있다.Here, the second
또한, 상기 제2 위치 감지부(360)는 상기 서브 무인 비행체(112, 122) 각각의 현재 위치에 대한 데이터 획득을 위하여, 인공위성에서 발생되는 전파를 수신하여 자신의 위치를 산출하는 GPS, 고도 측정을 위한 고도계 등을 포함할 수 있으며, 나아가서는 3차원 위치 센서 등을 더 포함할 수 있다. 상기 제2 구동부(395)는 프로펠러가 축에 고정되는 모터를 포함할 수 있다. 상기 제2 전원 공급부(390)는 충전이 가능한 충전지로 구현될 수 있으며 또 달리 일반적인 건전지로 구현될 수도 있다.In addition, the second
상기 서브 무인 비행체(112, 122)는 상기 제2 조명(340)을 통해 상기 제2 카메라(330)의 촬영 영역에 광을 조사할 수 있으며, 상기 제2 마이크로폰(350)을 통해 외부의 오디오를 수집하여 이를 영상과 함께 또는 별도의 데이터로 제공할 수 있다. 또한, 상기 서브 무인 비행체(112, 122)는 획득되는 각종 데이터, 설정값, 동작에 필요한 데이터나 프로그램 등을 상기 제2 저장부(380)에 저장할 수 있다.The sub unmanned
상기 서브 무인 비행체(112, 122)는 상기 제2 비행제어부(370)를 통해, 상기 지상 관제 센터(130)에 의해 상기 마스터 무인 비행체(111, 121)를 기준으로 한 상기 서브 무인 비행체(112, 122)의 비행 위치를 다수로 설정받아 데이터로서 상기 제2 저장부(380)에 저장되도록 제어할 수 있다.The sub unmanned
상기 서브 무인 비행체(112, 122)는 비행시 상기 지상 관제 센터(130)가 다수의 비행 위치 중 어느 하나를 선택하면, 상기 선택된 비행 위치에 해당하도록 상기 제2 구동부(395)를 제어할 수 있다.The sub unmanned
도 4는 도 1의 지상 관제 센터(130)를 설명하기 위한 상세 구성의 일례를 도시한 블록도이다.4 is a block diagram showing an example of a detailed configuration for describing the
도 1 및 도 4를 참조하면, 상기 일례의 지상 관제 센터(130)는 무선 통신부(410), 그룹 선정부(420), 지상 관제부(430), 및 제어부(440)를 포함하여 구성될 수 있다.1 and 4, the
상기 무선 통신부(410)는 상기 복수의 무인 비행체 그룹(110, 120) 각각에 포함된 마스터 무인 비행체(111, 121)와 무선 통신을 수행하여, 상기 마스터 무인 비행체(111, 121) 각각의 비행 정보 및 상기 마스터 무인 비행체(111, 121) 각각의 주변 환경 정보를 획득할 수 있다.The
상기 그룹 선정부(420)는 상기 무선 통신부(410)에 의해 획득된 상기 비행 정보 및 상기 주변 환경 정보를 이용하여 상기 복수의 무인 비행체 그룹(110, 120) 중 어느 하나의 무인 비행체 그룹을 상기 마스터 그룹(110)으로 선정하고, 나머지 무인 비행체 그룹을 서브 그룹(120)으로 선정할 수 있다.The
상기 지상 관제부(430)는 상기 그룹 선정부(420)에 의해 선정된 상기 마스터 그룹(110)에 상기 조작 신호를 전송하여, 상기 마스터 그룹(110)을 기준으로 상기 서브 그룹(120)이 미리 설정된 포메이션(Formation)을 유지하도록 비행 제어를 수행할 수 있다.The
상기 제어부(440)는 상기 일례의 지상 관제 센터(130), 즉 상기 무선 통신부(410), 상기 그룹 선정부(420), 상기 지상 관제부(430) 등의 동작을 전반적으로 제어할 수 있다.The
도 5는 도 1의 지상 관제 시스템(130)을 설명하기 위한 상세 구성의 다른 예를 도시한 블록도이다.5 is a block diagram showing another example of a detailed configuration for describing the
도 1 및 도 5를 참조하면, 상기 다른 예의 지상 관제 센터(130)는 무선 통신부(510), 그룹 선정부(520), 진단부(530), 데이터베이스(DB) 연동부(540), 지상 관제부(550), 및 제어부(560)를 포함하여 구성될 수 있다.1 and 5, the
상기 무선 통신부(510)는 상기 복수의 무인 비행체 그룹(110, 120) 각각에 포함된 마스터 무인 비행체(111, 121)와 무선 통신을 수행하여, 상기 마스터 무인 비행체(111, 121) 각각의 비행 정보 및 상기 마스터 무인 비행체(111, 121) 각각의 주변 환경 정보를 획득할 수 있다.The
상기 그룹 선정부(520)는 상기 무선 통신부(510)에 의해 획득된 상기 비행 정보 및 상기 주변 환경 정보를 이용하여 상기 복수의 무인 비행체 그룹(110, 120) 중 어느 하나의 무인 비행체 그룹을 상기 마스터 그룹(110)으로 선정하고, 나머지 무인 비행체 그룹을 서브 그룹(120)으로 선정할 수 있다.The
상기 진단부(530)는 상기 제1-1 및 제1-2 마스터 무인 비행체(111, 121) 각각의 오류 또는 포메이션 이탈을 진단할 수 있다.The
상기 DB 연동부(540)는 상기 오류 또는 포메이션 이탈로 진단된 제1-1 또는 제1-2 마스터 무인 비행체(111, 121)의 임무 수행과 관련한 이력 정보를 데이터베이스로부터 획득할 수 있다.The
상기 지상 관제부(550)는 상기 이력 정보를 동일 그룹(110, 120) 내 제2-1 및 제2-2 서브 무인 비행체(112, 122) 중 어느 하나에 전송하여, 상기 제1-1 또는 제1-2 마스터 무인 비행체(111, 121)의 임무를 상기 동일 그룹(110, 120) 내 제2-1 및 제2-2 서브 무인 비행체(112, 122) 중 어느 하나가 이어서 수행하도록 제어할 수 있다.The
상기 제어부(560)는 상기 다른 예의 지상 관제 센터(130), 즉 상기 무선 통신부(510), 상기 그룹 선정부(520), 상기 진단부(530), 상기 DB 연동부(540), 상기 지상 관제부(550) 등의 동작을 전반적으로 제어할 수 있다.The
이상에서 설명된 장치는 하드웨어 구성 요소, 소프트웨어 구성 요소, 및/또는 하드웨어 구성 요소 및 소프트웨어 구성 요소의 조합으로 구현될 수 있다. 예를 들어, 실시예들에서 설명된 장치 및 구성 요소는, 예를 들어, 프로세서, 컨트롤러, ALU(arithmetic logic unit), 디지털 신호 프로세서(digital signal processor), 마이크로컴퓨터, FPA(field programmable array), PLU(programmable logic unit), 마이크로프로세서, 또는 명령(instruction)을 실행하고 응답할 수 있는 다른 어떠한 장치와 같이, 하나 이상의 범용 컴퓨터 또는 특수 목적 컴퓨터를 이용하여 구현될 수 있다. 처리 장치는 운영 체제(OS) 및 상기 운영 체제 상에서 수행되는 하나 이상의 소프트웨어 애플리케이션을 수행할 수 있다. 또한, 처리 장치는 소프트웨어의 실행에 응답하여, 데이터를 접근, 저장, 조작, 처리 및 생성할 수도 있다. 이해의 편의를 위하여, 처리 장치는 하나가 사용되는 것으로 설명된 경우도 있지만, 해당 기술분야에서 통상의 지식을 가진 자는, 처리 장치가 복수 개의 처리 요소(processing element) 및/또는 복수 유형의 처리 요소를 포함할 수 있음을 알 수 있다. 예를 들어, 처리 장치는 복수 개의 프로세서 또는 하나의 프로세서 및 하나의 컨트롤러를 포함할 수 있다. 또한, 병렬 프로세서(parallel processor)와 같은, 다른 처리 구성(processing configuration)도 가능하다.The apparatus described above may be implemented as a hardware component, a software component, and/or a combination of a hardware component and a software component. For example, the devices and components described in the embodiments include, for example, a processor, a controller, an arithmetic logic unit (ALU), a digital signal processor, a microcomputer, a field programmable array (FPA), It can be implemented using one or more general purpose computers or special purpose computers, such as a programmable logic unit (PLU), a microprocessor, or any other device capable of executing and responding to instructions. The processing device may execute an operating system (OS) and one or more software applications executed on the operating system. In addition, the processing device may access, store, manipulate, process, and generate data in response to the execution of software. For the convenience of understanding, although it is sometimes described that one processing device is used, one of ordinary skill in the art, the processing device is a plurality of processing elements and/or a plurality of types of processing elements. It can be seen that it may include. For example, the processing device may include a plurality of processors or one processor and one controller. In addition, other processing configurations are possible, such as a parallel processor.
소프트웨어는 컴퓨터 프로그램(computer program), 코드(code), 명령(instruction), 또는 이들 중 하나 이상의 조합을 포함할 수 있으며, 원하는 대로 동작하도록 처리 장치를 구성하거나 독립적으로 또는 결합적으로(collectively) 처리 장치를 명령할 수 있다. 소프트웨어 및/또는 데이터는, 처리 장치에 의하여 해석되거나 처리 장치에 명령 또는 데이터를 제공하기 위하여, 어떤 유형의 기계, 구성요소(component), 물리적 장치, 가상 장치(virtual equipment), 컴퓨터 저장 매체 또는 장치, 또는 전송되는 신호 파(signal wave)에 영구적으로, 또는 일시적으로 구체화(embody)될 수 있다. 소프트웨어는 네트워크로 연결된 컴퓨터 시스템 상에 분산되어서, 분산된 방법으로 저장되거나 실행될 수도 있다. 소프트웨어 및 데이터는 하나 이상의 컴퓨터 판독 가능 기록 매체에 저장될 수 있다.The software may include a computer program, code, instructions, or a combination of one or more of these, configuring the processing unit to behave as desired or processed independently or collectively. You can command the device. Software and/or data may be interpreted by a processing device or to provide instructions or data to a processing device, of any type of machine, component, physical device, virtual equipment, computer storage medium or device. , Or may be permanently or temporarily embodyed in a transmitted signal wave. The software may be distributed over networked computer systems and stored or executed in a distributed manner. Software and data may be stored on one or more computer-readable recording media.
도 7 및 도 8은 본 발명의 일 실시예에 따른 무인 비행체의 군집 비행 제어 방법을 설명하기 위해 도시한 흐름도이다.7 and 8 are flowcharts illustrating a method of controlling a cluster flight of an unmanned aerial vehicle according to an embodiment of the present invention.
여기서 설명하는 무인 비행체의 군집 비행 제어 방법은 본 발명의 하나의 실시예에 불과하며, 그 이외에 필요에 따라 다양한 단계들이 부가될 수 있고, 하기의 단계들도 순서를 변경하여 실시될 수 있으므로, 본 발명이 하기에 설명하는 각 단계 및 그 순서에 한정되는 것은 아니다. 이는 아래의 다른 실시예들에서도 마찬가지로 동일하게 적용될 수 있다.The cluster flight control method of an unmanned aerial vehicle described herein is only one embodiment of the present invention, and various steps may be added as necessary, and the following steps may also be performed by changing the order. The invention is not limited to each step and its sequence described below. This can be applied equally to other embodiments below.
도 1 및 도 7을 참조하면, 단계(710)에서 상기 지상 관제 시스템(130)은 상기 복수의 무인 비행체 그룹(110, 120) 중 어느 하나의 무인 비행체 그룹을 마스터 그룹(110)으로 선정할 수 있다.1 and 7, in
구체적으로, 도 8에 도시된 바와 같이, 단계(810)에서 상기 지상 관제 시스템(130)은 상기 복수의 무인 비행체 그룹(110, 120) 각각에 포함된 마스터 무인 비행체(111, 121)와 무선 통신을 수행할 수 있다.Specifically, as shown in FIG. 8, in
이후, 단계(820)에서 상기 지상 관제 시스템(130)은 상기 마스터 무인 비행체(111, 121) 각각의 비행 정보 및 상기 마스터 무인 비행체(111, 121) 각각의 주변 환경 정보를 획득할 수 있다.Thereafter, in
이후, 단계(830)에서 상기 지상 관제 시스템(130)은 상기 비행 정보 및 상기 주변 환경 정보를 이용하여 상기 복수의 무인 비행체 그룹(110, 120) 중 어느 하나의 무인 비행체 그룹을 상기 마스터 그룹(110)으로 선정할 수 있다.Thereafter, in
다시 도 1 및 도 8을 참조하면, 단계(720)에서 상기 지상 관제 시스템(130)은 상기 마스터 그룹(110)을 제외한 나머지 무인 비행체 그룹을 서브 그룹(120)으로 선정할 수 있다.Referring back to FIGS. 1 and 8, in
다음으로, 단계(730)에서 상기 지상 관제 시스템(130)은 상기 선정된 마스터 그룹(110)에 상기 조작 신호를 전송하여 상기 마스터 그룹(110)을 기준으로 상기 서브 그룹(120)이 미리 설정된 포메이션을 유지하도록 비행 제어를 수행할 수 있다.Next, in
도 9는 본 발명의 일 실시예에 따라 마스터 그룹 및 서브 그룹에 대해 그룹 재편을 수행하는 과정을 설명하기 위해 도시한 흐름도이다.9 is a flowchart illustrating a process of performing group reorganization for a master group and a subgroup according to an embodiment of the present invention.
도 1 및 도 9를 참조하면, 단계(910)에서 상기 지상 관제 시스템(130)은 상기 복수의 무인 비행체 그룹(110, 120) 전체의 움직임을 고려하여 그룹 재편 명령 신호를 생성할 수 있다.Referring to FIGS. 1 and 9, in
다음으로, 단계(920)에서 상기 지상 관제 시스템(130)은 상기 생성된 그룹 재편 명령 신호를 상기 제1 마스터 무인 비행체(111)에 전송할 수 있다.Next, in
다음으로, 단계(930)에서 상기 제1-1 마스터 무인 비행체(111)는 상기 지상 관제 시스템(130)으로부터 상기 그룹 재편 명령 신호를 수신할 수 있다.Next, in
다음으로, 단계(940)에서 상기 제1-1 마스터 무인 비행체(111)는 상기 수신된 그룹 재편 명령 신호를 이용하여 상기 마스터 그룹(110) 내 무인 비행체(111, 112)의 개수, 비행 속도 및 비행 방향 중 적어도 하나를 변경할 수 있다.Next, in
다음으로, 단계(950)에서 상기 제1-1 마스터 무인 비행체(111)는 상기 그룹 재편 명령 신호를 상기 제1-2 마스터 무인 비행체(121)에 전송할 수 있다.Next, in
다음으로, 단계(960)에서 상기 제1-2 마스터 무인 비행체(121)는 상기 제1-1 마스터 무인 비행체(111)로부터 상기 그룹 재편 명령 신호를 수신할 수 있다.Next, in
다음으로, 단계(970)에서 상기 제1-2 마스터 무인 비행체(121)는 상기 수신된 그룹 재편 명령 신호를 이용하여 상기 서브 그룹(120) 내 무인 비행체(211, 212)의 개수, 비행 속도 및 비행 방향 중 적어도 하나를 변경할 수 있다.Next, in
실시예에 따른 방법은 다양한 컴퓨터 수단을 통하여 수행될 수 있는 프로그램 명령 형태로 구현되어 컴퓨터 판독 가능 매체에 기록될 수 있다. 상기 컴퓨터 판독 가능 매체는 프로그램 명령, 데이터 파일, 데이터 구조 등을 단독으로 또는 조합하여 포함할 수 있다. 상기 매체에 기록되는 프로그램 명령은 실시예를 위하여 특별히 설계되고 구성된 것들이거나 컴퓨터 소프트웨어 당업자에게 공지되어 사용 가능한 것일 수도 있다. 컴퓨터 판독 가능 기록 매체의 예에는 하드 디스크, 플로피 디스크 및 자기 테이프와 같은 자기 매체(magnetic media), CDROM, DVD와 같은 광기록 매체(optical media), 플롭티컬 디스크(floptical disk)와 같은 자기-광 매체(magneto-optical media), 및 롬(ROM), 램(RAM), 플래시 메모리 등과 같은 프로그램 명령을 저장하고 수행하도록 특별히 구성된 하드웨어 장치가 포함된다. 프로그램 명령의 예에는 컴파일러에 의해 만들어지는 것과 같은 기계어 코드뿐만 아니라 인터프리터 등을 사용해서 컴퓨터에 의해서 실행될 수 있는 고급 언어 코드를 포함한다. 상기된 하드웨어 장치는 실시예의 동작을 수행하기 위해 하나 이상의 소프트웨어 모듈로서 작동하도록 구성될 수 있으며, 그 역도 마찬가지이다.The method according to the embodiment may be implemented in the form of program instructions that can be executed through various computer means and recorded in a computer-readable medium. The computer-readable medium may include program instructions, data files, data structures, etc. alone or in combination. The program instructions recorded on the medium may be specially designed and configured for the embodiment, or may be known and usable to those skilled in computer software. Examples of computer-readable recording media include magnetic media such as hard disks, floppy disks, and magnetic tapes, optical media such as CDROMs and DVDs, and magnetic-optical media such as floptical disks. And hardware devices specially configured to store and execute program instructions such as magneto-optical media, and ROM, RAM, flash memory, and the like. Examples of the program instructions include not only machine language codes such as those produced by a compiler, but also high-level language codes that can be executed by a computer using an interpreter or the like. The hardware device described above may be configured to operate as one or more software modules to perform the operation of the embodiment, and vice versa.
이상과 같이 실시예들이 비록 한정된 실시예와 도면에 의해 설명되었으나, 해당 기술분야에서 통상의 지식을 가진 자라면 상기의 기재로부터 다양한 수정 및 변형이 가능하다. 예를 들어, 설명된 기술들이 설명된 방법과 다른 순서로 수행되거나, 및/또는 설명된 시스템, 구조, 장치, 회로 등의 구성요소들이 설명된 방법과 다른 형태로 결합 또는 조합되거나, 다른 구성요소 또는 균등물에 의하여 대치되거나 치환되더라도 적절한 결과가 달성될 수 있다.As described above, although the embodiments have been described by the limited embodiments and drawings, various modifications and variations are possible from the above description by those of ordinary skill in the art. For example, the described techniques are performed in a different order from the described method, and/or components such as a system, structure, device, circuit, etc. described are combined or combined in a form different from the described method, or other components Alternatively, even if substituted or substituted by an equivalent, an appropriate result can be achieved.
그러므로, 다른 구현들, 다른 실시예들 및 청구범위와 균등한 것들도 후술하는 청구범위의 범위에 속한다.Therefore, other implementations, other embodiments, and equivalents to the claims fall within the scope of the following claims.
110: 마스터 그룹
111: 제1-1 마스터 무인 비행체
112: 제2-1 서브 무인 비행체
120: 서브 그룹
121: 제1-2 마스터 무인 비행체
122: 제2-2 서브 무인 비행체
130: 지상 관제 시스템
410, 510: 무선 통신부
420, 520: 그룹 선정부
430, 550: 지상 관제부
440, 560: 제어부
530: 진단부
540: DB 연동부110: master group
111: 1-1 master unmanned aerial vehicle
112: 2-1 sub unmanned aerial vehicle
120: sub group
121: 1-2 master unmanned aerial vehicle
122: 2-2 sub unmanned aerial vehicle
130: ground control system
410, 510: wireless communication unit
420, 520: group selection section
430, 550: ground control
440, 560: control unit
530: diagnostic unit
540: DB linkage unit
Claims (16)
상기 복수의 무인 비행체 그룹 중 어느 하나의 무인 비행체 그룹을 마스터 그룹으로 선정하고 나머지 무인 비행체 그룹을 서브 그룹으로 선정하며, 상기 선정된 마스터 그룹에 상기 조작 신호를 전송하여 상기 마스터 그룹을 기준으로 상기 서브 그룹이 미리 설정된 포메이션(Formation)을 유지하도록 비행 제어를 수행하는 지상 관제 시스템
을 포함하는 것을 특징으로 하는 무인 비행체의 군집 비행 제어 시스템.
A plurality of including a master unmanned aerial vehicle receiving a manipulation signal and flying, and a plurality of sub unmanned aerial vehicles flying while receiving the manipulation signal from the master unmanned aerial vehicle while maintaining a preset position based on the master unmanned aerial vehicle Unmanned aerial vehicle group; And
One of the plurality of unmanned aerial vehicle groups is selected as a master group and the remaining unmanned aerial vehicle groups are selected as a sub-group, and the operation signal is transmitted to the selected master group, and the sub-group based on the master group. Ground control system that performs flight control so that the group maintains a preset formation
A swarm flight control system of an unmanned aerial vehicle comprising: a.
상기 지상 관제 시스템은
상기 복수의 무인 비행체 그룹 각각에 포함된 마스터 무인 비행체와 무선 통신을 수행하여, 상기 마스터 무인 비행체 각각의 비행 정보 및 상기 마스터 무인 비행체 각각의 주변 환경 정보를 획득하고, 상기 비행 정보 및 상기 주변 환경 정보를 이용하여 상기 복수의 무인 비행체 그룹 중 어느 하나의 무인 비행체 그룹을 상기 마스터 그룹으로 선정하는 것을 특징으로 하는 무인 비행체의 군집 비행 제어 시스템.
The method of claim 1,
The ground control system
By performing wireless communication with the master unmanned aerial vehicle included in each of the plurality of unmanned aerial vehicle groups, obtaining flight information of each of the master unmanned aerial vehicle and surrounding environment information of each of the master unmanned aerial vehicle, and the flight information and the surrounding environment information A cluster flight control system of an unmanned aerial vehicle, characterized in that selecting any one of the plurality of unmanned aerial vehicle groups as the master group.
상기 마스터 그룹은
상기 지상 관제 시스템으로부터 상기 조작 신호를 수신하여 비행하는 제1-1 마스터 무인 비행체, 및 상기 제1-1 마스터 무인 비행체로부터 상기 조작 신호를 수신하여 비행하되 상기 제1-1 마스터 무인 비행체를 기준으로 미리 설정된 위치를 유지하면서 비행하는 복수의 제2-1 서브 무인 비행체를 포함하고,
상기 서브 그룹은
상기 제1-1 마스터 무인 비행체로부터 상기 조작 신호를 수신하여 비행하는 제1-2 마스터 무인 비행체, 및 상기 제1-2 마스터 무인 비행체로부터 상기 조작 신호를 수신하여 비행하되 상기 제1-2 마스터 무인 비행체를 기준으로 미리 설정된 위치를 유지하면서 비행하는 복수의 제2-2 서브 무인 비행체를 포함하는 것을 특징으로 하는 무인 비행체의 군집 비행 제어 시스템.
The method of claim 1,
The master group
The 1-1 master unmanned aerial vehicle receiving the manipulation signal from the ground control system and flying, and the 1-1 master unmanned aerial vehicle receiving the manipulation signal from the flying vehicle, but flying based on the 1-1 master unmanned aerial vehicle It includes a plurality of 2-1 sub unmanned aerial vehicles flying while maintaining a preset position,
The subgroup is
The 1-2 master unmanned aerial vehicle receiving and flying the manipulation signal from the 1-1-1 master unmanned aerial vehicle, and the 1-2 master unmanned aerial vehicle receiving and flying the manipulation signal from the 1-2 master unmanned aerial vehicle A swarm flight control system of an unmanned aerial vehicle comprising a plurality of second-2 sub unmanned aerial vehicles flying while maintaining a preset position based on the vehicle.
상기 지상 관제 시스템은
상기 복수의 무인 비행체 그룹 전체의 움직임을 고려하여, 상기 마스터 그룹 및 상기 서브 그룹 내 무인 비행체의 개수, 비행 속도 및 비행 방향 중 적어도 하나를 변경하기 위한 그룹 재편 명령 신호를 생성하여 상기 제1-1 마스터 무인 비행체에 전송하는 것을 특징으로 하는 무인 비행체의 군집 비행 제어 시스템.
The method of claim 3,
The ground control system
By generating a group reorganization command signal for changing at least one of the number, flight speed, and flight direction of the master group and the subgroup in consideration of the movement of the entire group of the plurality of unmanned aerial vehicles, the 1-1 A cluster flight control system of an unmanned aerial vehicle, characterized in that transmission to the master unmanned aerial vehicle.
상기 제1-1 마스터 무인 비행체는
상기 지상 관제 시스템으로부터 상기 그룹 재편 명령 신호를 수신하여 상기 마스터 그룹 내 무인 비행체의 개수, 비행 속도 및 비행 방향 중 적어도 하나를 변경하고, 상기 그룹 재편 명령 신호를 상기 제1-2 마스터 무인 비행체에 전송하며,
상기 제1-2 마스터 무인 비행체는
상기 제1-1 마스터 무인 비행체로부터 상기 그룹 재편 명령 신호를 수신하여 상기 서브 그룹 내 무인 비행체의 개수, 비행 속도 및 비행 방향 중 적어도 하나를 변경하는 것을 특징으로 하는 무인 비행체의 군집 비행 제어 시스템.
The method of claim 4,
The 1-1 master unmanned aerial vehicle
Receive the group reorganization command signal from the ground control system, change at least one of the number, flight speed, and flight direction of unmanned aerial vehicles in the master group, and transmit the group reorganization command signal to the 1-2 master unmanned aerial vehicle And
The 1-2 master unmanned aerial vehicle
A cluster flight control system of an unmanned aerial vehicle, characterized in that for changing at least one of the number, flight speed, and flight direction of the number of unmanned aerial vehicles in the sub-group by receiving the group reorganization command signal from the 1-1 master unmanned aerial vehicle.
상기 지상 관제 시스템은
상기 제1-1 및 제1-2 마스터 무인 비행체 각각의 오류 또는 포메이션 이탈을 진단하고, 상기 오류 또는 포메이션 이탈로 진단된 제1-1 또는 제1-2 마스터 무인 비행체의 임무 수행과 관련한 이력 정보를 데이터베이스로부터 획득하며, 상기 이력 정보를 동일 그룹 내 제2-1 및 제2-2 서브 무인 비행체 중 어느 하나에 전송하여, 상기 제1-1 또는 제1-2 마스터 무인 비행체의 임무를 상기 동일 그룹 내 제2-1 및 제2-2 서브 무인 비행체 중 어느 하나가 이어서 수행하도록 제어하는 것을 특징으로 하는 무인 비행체의 군집 비행 제어 시스템.
The method of claim 3,
The ground control system
Diagnosing errors or formation departures of each of the 1-1 and 1-2 master unmanned aerial vehicles, and history information related to mission performance of the 1-1 or 1-2 master unmanned aerial vehicle diagnosed as the error or formation departure Is obtained from the database, and the history information is transmitted to any one of the 2-1 and 2-2 sub unmanned aerial vehicles in the same group, so that the mission of the 1-1 or 1-2 master unmanned aerial vehicle is the same A cluster flight control system of an unmanned aerial vehicle, characterized in that controlling any one of the 2-1 and 2-2 sub unmanned aerial vehicles in the group to subsequently perform.
상기 지상 관제 시스템은
상기 동일 그룹 내 가장 인접한 서브 무인 비행체 또는 배터리 잔량이 가장 많은 서브 무인 비행체에 상기 이력 정보를 전송하는 것을 특징으로 하는 무인 비행체의 군집 비행 제어 시스템.
The method of claim 6,
The ground control system
A cluster flight control system of an unmanned aerial vehicle, characterized in that transmitting the history information to the nearest sub unmanned aerial vehicle in the same group or the sub unmanned aerial vehicle having the largest remaining battery capacity.
상기 지상 관제 시스템은
상기 제2-1 및 제2-2 서브 무인 비행체 각각의 오류 또는 포메이션 이탈을 진단하고, 상기 진단 결과 상기 오류 또는 포메이션 이탈이 확인된 경우, 상기 마스터 그룹 내 제2-1 서브 무인 비행체 또는 상기 서브 그룹 내 제2-2 서브 무인 비행체의 개수, 비행 속도 및 비행 방향 중 적어도 하나를 변경하기 위한 그룹 재편 명령 신호를 생성하여 상기 제1-1 또는 제1-2 마스터 무인 비행체에 전송하는 것을 특징으로 하는 무인 비행체의 군집 비행 제어 시스템.
The method of claim 1,
The ground control system
When the error or formation departure of each of the 2-1 and 2-2 sub unmanned aerial vehicles is diagnosed, and the error or formation departure is confirmed as a result of the diagnosis, the 2-1 sub unmanned aerial vehicle or the sub A group reorganization command signal for changing at least one of the number, flight speed, and flight direction of the 2-2 sub unmanned aerial vehicle in the group is generated and transmitted to the 1-1 or 1-2 master unmanned aerial vehicle. A cluster flight control system for unmanned aerial vehicles.
상기 지상 관제 시스템이 상기 복수의 무인 비행체 그룹 중 어느 하나의 무인 비행체 그룹을 마스터 그룹으로 선정하는 단계;
상기 지상 관제 시스템이 상기 마스터 그룹을 제외한 나머지 무인 비행체 그룹을 서브 그룹으로 선정하는 단계; 및
상기 지상 관제 시스템이 상기 선정된 마스터 그룹에 상기 조작 신호를 전송하여 상기 마스터 그룹을 기준으로 상기 서브 그룹이 미리 설정된 포메이션(Formation)을 유지하도록 비행 제어를 수행하는 단계
를 포함하는 것을 특징으로 하는 무인 비행체의 군집 비행 제어 방법.
A plurality of including a master unmanned aerial vehicle receiving a manipulation signal and flying, and a plurality of sub unmanned aerial vehicles flying while receiving the manipulation signal from the master unmanned aerial vehicle while maintaining a preset position based on the master unmanned aerial vehicle In the cluster flight control method of an unmanned aerial vehicle using a cluster flight control system of an unmanned aerial vehicle including an unmanned aerial vehicle group and a ground control system,
Selecting, by the ground control system, an unmanned aerial vehicle group from among the plurality of unmanned aerial vehicle groups as a master group;
Selecting, by the ground control system, a group of unmanned aerial vehicles other than the master group as a subgroup; And
Performing flight control so that the subgroup maintains a preset formation based on the master group by transmitting the manipulation signal to the selected master group by the ground control system
Cluster flight control method of an unmanned aerial vehicle comprising a.
상기 마스터 그룹으로 선정하는 단계는
상기 지상 관제 시스템이 상기 복수의 무인 비행체 그룹 각각에 포함된 마스터 무인 비행체와 무선 통신을 수행하여, 상기 마스터 무인 비행체 각각의 비행 정보 및 상기 마스터 무인 비행체 각각의 주변 환경 정보를 획득하는 단계; 및
상기 지상 관제 시스템이 상기 비행 정보 및 상기 주변 환경 정보를 이용하여 상기 복수의 무인 비행체 그룹 중 어느 하나의 무인 비행체 그룹을 상기 마스터 그룹으로 선정하는 단계
를 포함하는 것을 특징으로 하는 무인 비행체의 군집 비행 제어 방법.
The method of claim 9,
The step of selecting as the master group
Obtaining, by the ground control system, wireless communication with a master unmanned aerial vehicle included in each of the plurality of unmanned aerial vehicle groups, and acquiring flight information of each of the master unmanned aerial vehicle and surrounding environment information of each of the master unmanned aerial vehicle; And
Selecting, by the ground control system, one of the plurality of unmanned aerial vehicle groups as the master group using the flight information and the surrounding environment information
Cluster flight control method of an unmanned aerial vehicle comprising a.
상기 마스터 그룹은
상기 지상 관제 시스템으로부터 상기 조작 신호를 수신하여 비행하는 제1-1 마스터 무인 비행체, 및 상기 제1-1 마스터 무인 비행체로부터 상기 조작 신호를 수신하여 비행하되 상기 제1-1 마스터 무인 비행체를 기준으로 미리 설정된 위치를 유지하면서 비행하는 복수의 제2-1 서브 무인 비행체를 포함하고,
상기 서브 그룹은
상기 제1-1 마스터 무인 비행체로부터 상기 조작 신호를 수신하여 비행하는 제1-2 마스터 무인 비행체, 및 상기 제1-2 마스터 무인 비행체로부터 상기 조작 신호를 수신하여 비행하되 상기 제1-2 마스터 무인 비행체를 기준으로 미리 설정된 위치를 유지하면서 비행하는 복수의 제2-2 서브 무인 비행체를 포함하는 것을 특징으로 하는 무인 비행체의 군집 비행 제어 방법.
The method of claim 9,
The master group
The 1-1 master unmanned aerial vehicle receiving the manipulation signal from the ground control system and flying, and the 1-1 master unmanned aerial vehicle receiving the manipulation signal from the flying vehicle, but flying based on the 1-1 master unmanned aerial vehicle It includes a plurality of 2-1 sub unmanned aerial vehicles flying while maintaining a preset position,
The subgroup is
The 1-2 master unmanned aerial vehicle receiving and flying the manipulation signal from the 1-1-1 master unmanned aerial vehicle, and the 1-2 master unmanned aerial vehicle receiving and flying the manipulation signal from the 1-2 master unmanned aerial vehicle A cluster flight control method of an unmanned aerial vehicle comprising a plurality of second-2 sub unmanned aerial vehicles flying while maintaining a preset position based on the vehicle.
상기 지상 관제 시스템이 상기 복수의 무인 비행체 그룹 전체의 움직임을 고려하여, 상기 마스터 그룹 및 상기 서브 그룹 내 무인 비행체의 개수, 비행 속도 및 비행 방향 중 적어도 하나를 변경하기 위한 그룹 재편 명령 신호를 생성하여 상기 제1 마스터 무인 비행체에 전송하는 단계
를 더 포함하는 것을 특징으로 하는 무인 비행체의 군집 비행 제어 방법.
The method of claim 11,
The ground control system generates a group reorganization command signal for changing at least one of the number, flight speed, and flight direction of the master group and the subgroup in consideration of the movement of the entire group of unmanned aerial vehicles. Transmitting to the first master unmanned aerial vehicle
Cluster flight control method of an unmanned aerial vehicle, characterized in that it further comprises.
상기 제1-1 마스터 무인 비행체가 상기 지상 관제 시스템으로부터 상기 그룹 재편 명령 신호를 수신하여 상기 마스터 그룹 내 무인 비행체의 개수, 비행 속도 및 비행 방향 중 적어도 하나를 변경하는 단계;
상기 제1-1 마스터 무인 비행체가 상기 그룹 재편 명령 신호를 상기 제1-2 마스터 무인 비행체에 전송하는 단계; 및
상기 제1-2 마스터 무인 비행체가 상기 제1-1 마스터 무인 비행체로부터 상기 그룹 재편 명령 신호를 수신하여 상기 서브 그룹 내 무인 비행체의 개수, 비행 속도 및 비행 방향 중 적어도 하나를 변경하는 단계
를 더 포함하는 것을 특징으로 하는 무인 비행체의 군집 비행 제어 방법.
The method of claim 12,
Changing at least one of the number, flight speed, and flight direction of the number of unmanned aerial vehicles in the master group by the 1-1 master unmanned aerial vehicle receiving the group reorganization command signal from the ground control system;
Transmitting, by the first-1st master unmanned aerial vehicle, the group reorganization command signal to the 1-2th master unmanned aerial vehicle; And
The 1-2 master unmanned aerial vehicle receives the group reorganization command signal from the 1--1 master unmanned aerial vehicle and changes at least one of the number, flight speed, and flight direction of unmanned aerial vehicles in the sub-group
Cluster flight control method of an unmanned aerial vehicle, characterized in that it further comprises.
상기 지상 관제 시스템이 상기 제1-1 및 제1-2 마스터 무인 비행체 각각의 오류 또는 포메이션 이탈을 진단하는 단계;
상기 지상 관제 시스템이 상기 오류 또는 포메이션 이탈로 진단된 제1-1 또는 제1-2 마스터 무인 비행체의 임무 수행과 관련한 이력 정보를 데이터베이스로부터 획득하는 단계; 및
상기 지상 관제 시스템이 상기 이력 정보를 동일 그룹 내 제2-1 및 제2-2 서브 무인 비행체 중 어느 하나에 전송하여, 상기 제1-1 또는 제1-2 마스터 무인 비행체의 임무를 상기 동일 그룹 내 제2-1 및 제2-2 서브 무인 비행체 중 어느 하나가 이어서 수행하도록 제어하는 단계
를 더 포함하는 것을 특징으로 하는 무인 비행체의 군집 비행 제어 방법.
The method of claim 11,
Diagnosing, by the ground control system, an error or departure from the formation of each of the 1-1 and 1-2 master unmanned aerial vehicles;
Obtaining, by the ground control system, history information related to the mission performance of the 1-1 or 1-2 master unmanned aerial vehicle diagnosed as the error or formation departure from a database; And
The ground control system transmits the history information to any one of the 2-1 and 2-2 sub unmanned aerial vehicles in the same group, so that the mission of the 1-1 or 1-2 master unmanned aerial vehicle is transferred to the same group. Controlling any one of my 2-1 and 2-2 sub unmanned aerial vehicles to perform next
Cluster flight control method of an unmanned aerial vehicle, characterized in that it further comprises.
상기 지상 관제 시스템은
상기 동일 그룹 내 가장 인접한 서브 무인 비행체 또는 배터리 잔량이 가장 많은 서브 무인 비행체에 상기 이력 정보를 전송하는 것을 특징으로 하는 무인 비행체의 군집 비행 제어 방법.
The method of claim 14,
The ground control system
The method for controlling a cluster flight of an unmanned aerial vehicle, characterized in that transmitting the history information to the nearest sub unmanned aerial vehicle in the same group or the sub unmanned aerial vehicle having the largest remaining battery capacity.
상기 지상 관제 시스템이 상기 제2-1 및 제2-2 서브 무인 비행체 각각의 오류 또는 포메이션 이탈을 진단하는 단계; 및
상기 진단 결과 상기 오류 또는 포메이션 이탈이 확인된 경우, 상기 지상 관제 시스템이 상기 마스터 그룹 내 제2-1 서브 무인 비행체 또는 상기 서브 그룹 내 제2-2 서브 무인 비행체의 개수, 비행 속도 및 비행 방향 중 적어도 하나를 변경하기 위한 그룹 재편 명령 신호를 생성하여 상기 제1-1 또는 제1-2 마스터 무인 비행체에 전송하는 단계
를 더 포함하는 것을 특징으로 하는 무인 비행체의 군집 비행 제어 방법.The method of claim 9,
Diagnosing, by the ground control system, an error or formation departure of each of the 2-1 and 2-2 sub unmanned aerial vehicles; And
When the error or formation deviation is confirmed as a result of the diagnosis, the ground control system is selected from among the number, flight speed, and flight direction of the 2-1 sub-unmanned vehicle in the master group or the 2-2 sub-unmanned vehicle in the sub-group. Generating a group reorganization command signal for changing at least one and transmitting it to the 1-1 or 1-2 master unmanned aerial vehicle
Cluster flight control method of an unmanned aerial vehicle, characterized in that it further comprises.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020190087738A KR102386832B1 (en) | 2019-07-19 | 2019-07-19 | System and method for controlling cluster flight of unmanned aerial vehicle |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020190087738A KR102386832B1 (en) | 2019-07-19 | 2019-07-19 | System and method for controlling cluster flight of unmanned aerial vehicle |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20210010172A true KR20210010172A (en) | 2021-01-27 |
| KR102386832B1 KR102386832B1 (en) | 2022-04-14 |
Family
ID=74238972
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020190087738A Active KR102386832B1 (en) | 2019-07-19 | 2019-07-19 | System and method for controlling cluster flight of unmanned aerial vehicle |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR102386832B1 (en) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102290373B1 (en) * | 2021-03-30 | 2021-08-18 | 세종대학교산학협력단 | Drone cluster and control method of thereof flight |
| CN113867411A (en) * | 2021-11-18 | 2021-12-31 | 深圳大学 | Unmanned aerial vehicle cluster positioning method and device and computer equipment |
| CN114063636A (en) * | 2021-08-11 | 2022-02-18 | 中国电子科技集团公司电子科学研究院 | Interference observer-based unmanned aerial vehicle cluster intensive formation control method and device |
| WO2023008598A1 (en) * | 2021-07-27 | 2023-02-02 | 주식회사 럭스로보 | Smart ai kit control system capable of mission delivery |
| US12231993B2 (en) | 2022-02-24 | 2025-02-18 | Microavia International Limited | Wireless bidirectional communication network for UAV |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20170030442A (en) * | 2015-09-09 | 2017-03-17 | 주식회사 케이티 | Drone base station and method and apparatus for managing drone base station |
| KR101934300B1 (en) * | 2017-05-24 | 2019-01-03 | (주)스마트모션 | Apparatus of controlling drone and method of controlling formation flight using the same |
| WO2019018337A1 (en) * | 2017-07-20 | 2019-01-24 | Walmart Apollo, Llc | Task management of autonomous product delivery vehicles |
-
2019
- 2019-07-19 KR KR1020190087738A patent/KR102386832B1/en active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20170030442A (en) * | 2015-09-09 | 2017-03-17 | 주식회사 케이티 | Drone base station and method and apparatus for managing drone base station |
| KR101934300B1 (en) * | 2017-05-24 | 2019-01-03 | (주)스마트모션 | Apparatus of controlling drone and method of controlling formation flight using the same |
| WO2019018337A1 (en) * | 2017-07-20 | 2019-01-24 | Walmart Apollo, Llc | Task management of autonomous product delivery vehicles |
Non-Patent Citations (1)
| Title |
|---|
| Muhammad Asghar Khan 외 2명, A Hybrid Communication Scheme for Efficient and Low-Cost Deployment of Future Flying Ad-Hoc Network (FANET), Drones 2019, 3, 16, 2019.02.11* * |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102290373B1 (en) * | 2021-03-30 | 2021-08-18 | 세종대학교산학협력단 | Drone cluster and control method of thereof flight |
| WO2023008598A1 (en) * | 2021-07-27 | 2023-02-02 | 주식회사 럭스로보 | Smart ai kit control system capable of mission delivery |
| KR20230017074A (en) * | 2021-07-27 | 2023-02-03 | 주식회사 럭스로보 | A smart artificial intelligent kit controlling system with transmitting missions |
| CN114063636A (en) * | 2021-08-11 | 2022-02-18 | 中国电子科技集团公司电子科学研究院 | Interference observer-based unmanned aerial vehicle cluster intensive formation control method and device |
| CN114063636B (en) * | 2021-08-11 | 2023-11-17 | 中国电子科技集团公司电子科学研究院 | Unmanned aerial vehicle cluster intensive formation control method and device based on interference observer |
| CN113867411A (en) * | 2021-11-18 | 2021-12-31 | 深圳大学 | Unmanned aerial vehicle cluster positioning method and device and computer equipment |
| US12231993B2 (en) | 2022-02-24 | 2025-02-18 | Microavia International Limited | Wireless bidirectional communication network for UAV |
Also Published As
| Publication number | Publication date |
|---|---|
| KR102386832B1 (en) | 2022-04-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102386832B1 (en) | System and method for controlling cluster flight of unmanned aerial vehicle | |
| KR102258730B1 (en) | System for controlling cluster flight of unmanned aerial vehicle | |
| US11036241B2 (en) | Simple multi-sensor calibration | |
| US8515596B2 (en) | Incremental position-based guidance for a UAV | |
| CN107077113B (en) | Unmanned aerial vehicle flight display | |
| US10115048B2 (en) | Method and system for configurable and scalable unmanned aerial vehicles and systems | |
| CN104322048B (en) | Portable Mobile Lighting Stand | |
| US10838415B2 (en) | Systems and methods for automatically customizing operation of a robotic vehicle | |
| EP3619584B1 (en) | Underwater leading drone system | |
| KR20210012414A (en) | System and method for controlling cluster flight of unmanned aerial vehicle | |
| JP7019240B2 (en) | Formation flight control method with multiple flying objects | |
| WO2016171160A1 (en) | Sound transmission system | |
| KR20180120289A (en) | Multi-vehicle control system using single regulator | |
| JP7017696B2 (en) | Information processing equipment, information processing equipment control method, unmanned aerial vehicle, unmanned aerial vehicle control method, and program | |
| JP7679097B2 (en) | Work plan generation system | |
| US11620913B2 (en) | Movable object application framework | |
| JP7819758B2 (en) | Traffic management system, traffic management method, and program | |
| TWI656422B (en) | Unmanned aerial vehicle control method and system thereof | |
| KR20210010171A (en) | System and method for controlling flight sequence of unmanned aerial vehicle | |
| Jambula et al. | Enhanced UAV with Image-Driven Concrete Crack Detection | |
| KR102612635B1 (en) | Platform system for controlling autonomous unmanned vehicle | |
| JP6459012B1 (en) | Control device, imaging device, flying object, control method, and program | |
| JP6409239B1 (en) | Imaging apparatus, imaging system, flying object, recording method, and program | |
| Prakash et al. | Drone design for object detection using YOLOv8 | |
| KR20240082152A (en) | Take-off and landing pad appratus for unmanned aerial vehicl and control method for controlling the same |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application |
St.27 status event code: A-0-1-A10-A12-nap-PA0109 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| PA0201 | Request for examination |
St.27 status event code: A-1-2-D10-D11-exm-PA0201 |
|
| D13-X000 | Search requested |
St.27 status event code: A-1-2-D10-D13-srh-X000 |
|
| PG1501 | Laying open of application |
St.27 status event code: A-1-1-Q10-Q12-nap-PG1501 |
|
| D14-X000 | Search report completed |
St.27 status event code: A-1-2-D10-D14-srh-X000 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| R15-X000 | Change to inventor requested |
St.27 status event code: A-3-3-R10-R15-oth-X000 |
|
| R16-X000 | Change to inventor recorded |
St.27 status event code: A-3-3-R10-R16-oth-X000 |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
St.27 status event code: A-1-2-D10-D21-exm-PE0902 |
|
| T11-X000 | Administrative time limit extension requested |
St.27 status event code: U-3-3-T10-T11-oth-X000 |
|
| R17-X000 | Change to representative recorded |
St.27 status event code: A-3-3-R10-R17-oth-X000 |
|
| T11-X000 | Administrative time limit extension requested |
St.27 status event code: U-3-3-T10-T11-oth-X000 |
|
| T11-X000 | Administrative time limit extension requested |
St.27 status event code: U-3-3-T10-T11-oth-X000 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| R15-X000 | Change to inventor requested |
St.27 status event code: A-3-3-R10-R15-oth-X000 |
|
| R16-X000 | Change to inventor recorded |
St.27 status event code: A-3-3-R10-R16-oth-X000 |
|
| E13-X000 | Pre-grant limitation requested |
St.27 status event code: A-2-3-E10-E13-lim-X000 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| E701 | Decision to grant or registration of patent right | ||
| GRNT | Written decision to grant | ||
| PE0701 | Decision of registration |
St.27 status event code: A-1-2-D10-D22-exm-PE0701 |
|
| PR0701 | Registration of establishment |
St.27 status event code: A-2-4-F10-F11-exm-PR0701 |
|
| PR1002 | Payment of registration fee |
St.27 status event code: A-2-2-U10-U11-oth-PR1002 Fee payment year number: 1 |
|
| PG1601 | Publication of registration |
St.27 status event code: A-4-4-Q10-Q13-nap-PG1601 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-4-4-P10-P22-nap-X000 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-4-4-P10-P22-nap-X000 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-4-4-P10-P22-nap-X000 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 4 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-4-4-P10-P22-nap-X000 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 5 |
|
| U11 | Full renewal or maintenance fee paid |
Free format text: ST27 STATUS EVENT CODE: A-4-4-U10-U11-OTH-PR1001 (AS PROVIDED BY THE NATIONAL OFFICE) Year of fee payment: 5 |