KR102371755B1 - 패시브 회전자를 가진 로봇 구동 - Google Patents
패시브 회전자를 가진 로봇 구동 Download PDFInfo
- Publication number
- KR102371755B1 KR102371755B1 KR1020207030551A KR20207030551A KR102371755B1 KR 102371755 B1 KR102371755 B1 KR 102371755B1 KR 1020207030551 A KR1020207030551 A KR 1020207030551A KR 20207030551 A KR20207030551 A KR 20207030551A KR 102371755 B1 KR102371755 B1 KR 102371755B1
- Authority
- KR
- South Korea
- Prior art keywords
- motor assembly
- assembly housing
- position sensor
- casing
- housing
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images





































Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K5/00—Casings; Enclosures; Supports
- H02K5/04—Casings or enclosures characterised by the shape, form or construction thereof
- H02K5/12—Casings or enclosures characterised by the shape, form or construction thereof specially adapted for operating in liquid or gas
- H02K5/128—Casings or enclosures characterised by the shape, form or construction thereof specially adapted for operating in liquid or gas using air-gap sleeves or air-gap discs
-
- H01L21/67742—
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K5/00—Casings; Enclosures; Supports
- H02K5/04—Casings or enclosures characterised by the shape, form or construction thereof
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J19/00—Accessories fitted to manipulators, e.g. for monitoring, for viewing; Safety devices combined with or specially adapted for use in connection with manipulators
- B25J19/0075—Means for protecting the manipulator from its environment or vice versa
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/10—Program-controlled manipulators characterised by positioning means for manipulator elements
- B25J9/12—Program-controlled manipulators characterised by positioning means for manipulator elements electric
- B25J9/126—Rotary actuators
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K21/00—Synchronous motors having permanent magnets; Synchronous generators having permanent magnets
- H02K21/38—Synchronous motors having permanent magnets; Synchronous generators having permanent magnets with rotating flux distributors, and armatures and magnets both stationary
- H02K21/44—Synchronous motors having permanent magnets; Synchronous generators having permanent magnets with rotating flux distributors, and armatures and magnets both stationary with armature windings wound upon the magnets
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K3/00—Details of windings
- H02K3/44—Protection against moisture or chemical attack; Windings specially adapted for operation in liquid or gas
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K41/00—Propulsion systems in which a rigid body is moved along a path due to dynamo-electric interaction between the body and a magnetic field travelling along the path
- H02K41/02—Linear motors; Sectional motors
- H02K41/03—Synchronous motors; Motors moving step by step; Reluctance motors
- H02K41/031—Synchronous motors; Motors moving step by step; Reluctance motors of the permanent magnet type
- H02K41/033—Synchronous motors; Motors moving step by step; Reluctance motors of the permanent magnet type with armature and magnets on one member, the other member being a flux distributor
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K5/00—Casings; Enclosures; Supports
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K5/00—Casings; Enclosures; Supports
- H02K5/04—Casings or enclosures characterised by the shape, form or construction thereof
- H02K5/22—Auxiliary parts of casings not covered by groups H02K5/06-H02K5/20, e.g. shaped to form connection boxes or terminal boxes
- H02K5/225—Terminal boxes or connection arrangements
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K9/00—Arrangements for cooling or ventilating
- H02K9/22—Arrangements for cooling or ventilating by solid heat conducting material embedded in, or arranged in contact with, the stator or rotor, e.g. heat bridges
- H02K9/223—Heat bridges
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10P—GENERIC PROCESSES OR APPARATUS FOR THE MANUFACTURE OR TREATMENT OF DEVICES COVERED BY CLASS H10
- H10P72/00—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof
- H10P72/30—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof for conveying, e.g. between different workstations
- H10P72/33—Handling or holding of wafers, substrates or devices during manufacture or treatment thereof for conveying, e.g. between different workstations into and out of processing chamber
- H10P72/3302—Mechanical parts of transfer devices
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K15/00—Processes or apparatus specially adapted for manufacturing, assembling, maintaining or repairing of dynamo-electric machines
- H02K15/12—Impregnating, moulding insulation, heating or drying of windings, stators, rotors or machines
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K3/00—Details of windings
- H02K3/30—Windings characterised by the insulating material
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S901/00—Robots
- Y10S901/19—Drive system for arm
- Y10S901/23—Electric motor
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Robotics (AREA)
- Physics & Mathematics (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Electromagnetism (AREA)
- Mechanical Engineering (AREA)
- Motor Or Generator Frames (AREA)
- Container, Conveyance, Adherence, Positioning, Of Wafer (AREA)
- Manipulator (AREA)
- Permanent Magnet Type Synchronous Machine (AREA)
- Connection Of Motors, Electrical Generators, Mechanical Devices, And The Like (AREA)
- Iron Core Of Rotating Electric Machines (AREA)
- Manufacturing & Machinery (AREA)
- Manufacture Of Motors, Generators (AREA)
- Connector Housings Or Holding Contact Members (AREA)
- Permanent Field Magnets Of Synchronous Machinery (AREA)
Abstract
Description
본 발명의 일 실시예에 따르면, 위치 센서 독출 헤드(position sensor read head); 상기 위치 센서 독출 헤드에 연결된 케이싱으로서, 상기 케이싱은 모터 조립체 하우징 내측의 환경을 통공에서 모터 조립체 하우징 외측의 환경으로부터 분리되게 유지하도록 모터 조립체 하우징을 통한 통공을 밀봉하도록 상기 모터 조립체 하우징에 밀봉되게 연결되게끔 구성되고, 상기 케이싱은 위치 센서 독출 헤드의 적어도 일부를 모터 조립체 하우징 내측의 환경으로부터 격리시키도록 구성되고, 위치 센서 독출 헤드는 모터 조립체 하우징 내측의 환경에서 기준 부재(reference member)를 감지하도록 구성되는, 케이싱; 및, 케이싱을 포함하는 조절 가능 커넥터로서, 상기 조절 가능 커넥터는 위치 센서 독출 헤드를 모터 조립체 하우징에 조절 가능하게 연결하고 다수의 상이한 위치들중 하나에서 모터 조립체 하우징에 대하여 위치 센서 독출 헤드의 위치 잠김(locking of location)이 이루어지도록 구성되고, 조절 가능 커넥터는 모터 조립체 하우징 내측의 환경을 통공에서 모터 조립체 하우징 외측의 환경으로부터 분리되게 유지하기 위해 모터 조립체 하우징을 통한 통공을 밀봉하도록 구성되고, 조절 가능 커넥터는 모터 조립체 하우징에 있는 위치 센서 독출 헤드의 위치가 모터 조립체 하우징 외측으로부터 조절될 수 있도록 구성되고, 조절 가능 커넥터는, 통공에서 모터 조립체 하우징과의 밀봉을 파괴하지 않으면서, 위치 센서 독출 헤드가 모터 조립체 하우징에서 다수의 상이한 위치들로 반경 방향으로 조절될 수 있도록 구성되는, 조절 가능 커넥터;를 포함하는, 장치가 제공된다.
본 발명의 다른 실시예에 따르면, 통공을 둘러싸도록 케이싱에 있는 밀봉을 더 포함하고, 상기 밀봉은 케이싱을 모터 조립체 하우징에 밀봉되게 연결한다.
본 발명의 다른 실시예에 따르면, 케이싱이 모터 조립체 하우징에 장착될 때 케이싱은 위치 센서 독출 헤드를 모터 조립체 하우징 내측의 환경으로부터 완전하게 격리시키도록 구성된다.
본 발명의 다른 실시예에 따르면, 케이싱이 모터 조립체 하우징에 장착될 때, 케이싱은 위치 센서 독출 헤드의 활성 구성 요소(active component)를 모터 조립체 하우징 내측의 환경으로부터 격리시키지 않도록 구성되고, 케이싱이 모터 조립체 하우징에 장착될 때, 케이싱은 위치 센서 독출 헤드의 다른 부분을 모터 조립체 하우징 내측의 환경으로부터 격리시키도록 구성된다.
본 발명의 다른 실시예에 따르면, 조절 가능 커넥터는 케이싱을 모터 조립체 하우징에 제거 가능하게 연결하기 위한 제거 가능 커넥터를 포함한다.
본 발명의 다른 실시예에 따르면, 위치 센서 독출 헤드는 유도성 독출 헤드(inductive read head)이고, 장치는 위치 센서 독출 헤드에 의해 감지되도록 구성된 견고한 금속의 디스크로서의 기준 부재를 포함한다.
본 발명의 다른 실시예에 따르면, 케이싱은 금속을 포함하고, 상기 금속은 모터 조립체 하우징에 부합되는 밀봉(compliant seal)으로 밀봉되게 연결되도록 구성된다.
본 발명의 다른 실시예에 따르면, 조절 가능 커넥터는, 통공에서 모터 조립체 하우징과의 밀봉을 파괴하지 않으면서, 위치 센서 독출 헤드가 모터 조립체 하우징에서 축방향으로 조절될 수 있도록 구성된다.
본 발명의 다른 실시예에 따르면, 위치 센서 독출 헤드는 모터 조립체 하우징의 외측으로부터 통공을 통해 모터 조립체 하우징의 내측 표면을 지나서 돌출하도록 구성되고, 위치 센서 독출 헤드의 활성 구성 요소는(active component)는 모터 조립체 하우징의 내측 표면을 적어도 부분적으로 지나서 모터 조립체 하우징의 내측에 위치된다.
본 발명의 다른 실시예에 따르면, 케이싱은 통공보다 큰 헤드 섹션(head section) 및 통공을 통해 연장되는 샤프트 섹션(shaft section)을 포함하고, 상기 헤드 섹션은 모터 조립체 하우징의 외측에 장착되도록 구성되고 위치된다.
본 발명의 다른 실시예에 따르면, 위치 센서 독출 헤드; 및, 상기 위치 센서 독출 헤드를 모터 조립체 하우징에 조절 가능하게 연결하고 상기 모터 조립체 하우징에 대한 위치 센서 독출 헤드의 위치를 다수의 상이한 위치들중 하나에 위치 잠김(locking of location)이 이루어지도록 구성된 조절 가능 커넥터;를 포함하는 장치로서, 조절 가능 커넥터는 모터 조립체 하우징을 통한 통공에서 모터 조립체 하우징 내측의 환경을 모터 조립체 하우징 외측의 환경으로부터 분리되게 유지하기 위하여 상기 통공을 밀봉하도록 구성되고, 위치 센서 독출 헤드는 모터 조립체 하우징 내측의 환경에 위치하는 기준 부재를 독출하도록 구성되고, 조절 가능 커넥터는 모터 조립체 하우징상의 위치 센서 독출 헤드의 위치가 모터 조립체 하우징 외측으로부터 조절될 수 있도록 구성되고, 조절 가능 커넥터는, 통공에서 모터 조립체 하우징과의 밀봉을 파괴하지 않으면서, 위치 센서 독출 헤드가 모터 조립체 하우징에 대하여 반경 방향으로 조절될 수 있고 다수의 상이한 반경 방향 위치들중 하나에 위치 잠김(locking of location)이 이루어지도록 구성되는, 장치가 제공된다.
본 발명의 다른 실시예에 따르면, 조절 가능 커넥터는 위치 센서 독출 헤드에 연결된 케이싱 및, 케이싱의 일부를 모터 조립체 하우징을 향하여 클램핑(clamping)시키도록 구성된 패스너(fasteners)들을 포함하고, 조절 가능 커넥터는 케이싱이 모터 조립체 하우징에서 조절될 수 있게 함으로써 모터 조립체 하우징에 대하여 위치 센서 독출 헤드를 조절하도록 구성된다.
본 발명의 다른 실시예에 따르면, 조절 가능 커넥터는, 모터 조립체 하우징 내측의 환경과 모터 조립체 하우징 외측의 환경 사이에 있는 통공에서의 밀봉을 파괴시키지 않으면서, 기준 부재에 대한 위치 센서 독출 헤드의 위치가 조절될 수 있도록 구성된다.
본 발명의 다른 실시예에 따르면, 조절 가능 커넥터는 모터 조립체 하우징의 외측에서 통공을 둘러싸도록 구성된 밀봉을 포함하고, 조절 가능 커넥터는 모터 조립체 하우징 내측의 환경과 모터 조립체 하우징 외측의 환경 사이에 있는 통공에서의 밀봉을 유지하면서 기준 부재에 대하여 축방향(axially) 및/또는 각도상의(angular) 움직임을 허용하도록 구성되기도 한다.
본 발명의 다른 실시예에 따르면, 조절 가능 커넥터는 위치 센서 독출 헤드에 연결된 케이싱을 포함하고, 케이싱은 모터 조립체 하우징의 돌출부들을 수용하도록 구성된 구멍들을 포함하고, 상기 구멍들은 케이싱이 돌출부들상에서 움직일 수 있도록 돌출부들보다 크고, 케이싱의 위치를 모터 조립체 하우징상에 위치 잠김이 이루어지게 하는 패스너(fasteners)들을 더 포함한다.
본 발명의 다른 실시예에 따르면, 위치 센서 독출 헤드에 연결된 케이싱을 포함하고, 케이싱은 통공에서 모터 조립체 하우징 내측의 환경을 모터 조립체 하우징 외측의 환경으로부터 분리되게 유지하기 위하여 모터 조립체 하우징을 통한 통공을 밀봉하도록 모터 조립체 하우징에 밀봉되게 연결되게끔 구성되고, 케이싱은 모터 조립체 하우징 내측의 환경으로부터 위치 센서 독출 헤드의 적어도 일부를 격리시키도록 구성된다.
본 발명의 다른 실시예에 따르면, 위치 센서 독출 헤드는 유도성 독출 헤드(inductive read head)이고, 장치는 위치 센서 독출 헤드에 의해 감지되도록 구성된 단단한 금속의 디스크로서의 기준 부재를 포함한다.
본 발명의 다른 실시예에 따르면, 조절 가능 커넥터는 위치 센서 독출 헤드상의 케이싱을 포함하는 제거 가능한 커넥터이고, 상기 제거 가능한 커넥터는 모터 조립체 하우징을 통한 통공에서 위치 센서 독출 헤드를 제거 가능하게 연결하도록 구성되고, 제거 가능한 커넥터는, 통공에서 모터 조립체 하우징 내측의 환경을 모터 조립체 하우징 외측의 환경으로부터 분리되게 유지하기 위하여 모터 조립체 하우징을 통한 통공을 틀어막고 모터 조립체 하우징과 밀봉되며, 제거 가능한 커넥터는 위치 센서 독출 헤드를 통공으로부터 외측으로 당김으로써 위치 센서 독출 헤드가 모터 조립체 하우징으로부터 빠져나갈 수 있도록 구성된다.
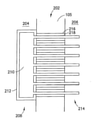
도 1 은 예시적인 장치의 개략적인 단면도이다.
도 2 는 피드 쓰루(feed-through)의 개략적인 도면이다.
도 3a 는 다른 피드 쓰루의 개략적인 도면이다.
도 3b 는 다른 피드 쓰루의 개략적인 단면이다.
도 3c 는 다른 피드 쓰루의 개략적인 단면이다.
도 3d 는 다른 피드 쓰루의 개략적인 단면이다.
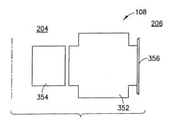
도 4 는 하우징에 연결된 독출 헤드의 개략적인 도면이다.
도 5 는 하우징에 연결된 독출 헤드의 다른 예에 대한 개략적인 도면이다.
도 6 은 하우징에 연결된 독출 헤드의 다른 예에 대한 개략적인 도면이다.
도 7 은 하우징에 연결된 독출 헤드의 다른 예에 대한 개략적인 도면이다.
도 8 및 도 9 는 하우징에 연결된 독출 헤드의 다른 예에 대한 개략적인 도면이다.
도 10 및 도 11 은 하우징에 연결된 독출 헤드의 다른 예에 대한 개략적인 도면이다.
도 12 내지 도 19 는 다양한 분리 벽 구성들에 대한 개략적인 도면이다.
도 20 내지 도 23 은 고정자 엔캡슐레이션을 가진 다양한 고정자 및 회전자 조합의 개략적인 도면이다.
도 24 는 래디얼 필드 구성(radial field arrangement)을 가진 모터를 도시한다.
도 25 는 치가 형성된 패시브 회전자, 및 링 영구 자석에 의해 분리된 고정자 페이즈(stator phase) A 및 고정자 페이즈 B 를 가진 하이브리드 모터 디자인을 도시한다.
도 26 은 축방향 필드 디자인을 가진 모터를 도시한다.
도 27 은 패시브 회전자를 가진 브러쉬리스 디자인(brushless design)을 구비한 모터를 도시한다.
도 28 및 도 29 는 치가 형성된 패시브 회전자를 가진 모터를 도시한다.
도 30 및 도 31 은 치가 형성된 패시브 회전자를 가진 모터를 도시한다.
도 32 및 도 33 은 치가 형성된 패시브 회전자를 가진 모터를 도시한다.
도 34 및 도 35 는 치가 형성된 패시브 회전자를 가진 모터를 도시한다.
도 36 및 도 37 은 치가 형성된 패시브 회전자를 가진 모터를 도시한다.
101. 프레임 103. 레일
105. 모터 하우징 108.109. 모터
Claims (18)
- 위치 센서 독출 헤드(position sensor read head);
상기 위치 센서 독출 헤드에 연결된 케이싱으로서, 상기 케이싱은 모터 조립체 하우징 내측의 환경을 통공에서 모터 조립체 하우징 외측의 환경으로부터 분리되게 유지하도록 모터 조립체 하우징을 통한 통공을 밀봉하도록 상기 모터 조립체 하우징에 밀봉되게 연결되게끔 구성되고, 상기 케이싱은 위치 센서 독출 헤드의 적어도 일부를 모터 조립체 하우징 내측의 환경으로부터 격리시키도록 구성되고, 위치 센서 독출 헤드는 모터 조립체 하우징 내측의 환경에서 기준 부재(reference member)를 감지하도록 구성되는, 케이싱; 및,
케이싱을 포함하는 조절 가능 커넥터로서, 상기 조절 가능 커넥터는 위치 센서 독출 헤드를 모터 조립체 하우징에 조절 가능하게 연결하고 다수의 상이한 위치들중 하나에서 모터 조립체 하우징에 대하여 위치 센서 독출 헤드의 위치 잠김(locking of location)이 이루어지도록 구성되고, 조절 가능 커넥터는 모터 조립체 하우징 내측의 환경을 통공에서 모터 조립체 하우징 외측의 환경으로부터 분리되게 유지하기 위해 모터 조립체 하우징을 통한 통공을 밀봉하도록 구성되고, 조절 가능 커넥터는 모터 조립체 하우징에 있는 위치 센서 독출 헤드의 위치가 모터 조립체 하우징 외측으로부터 조절될 수 있도록 구성되고, 조절 가능 커넥터는, 통공에서 모터 조립체 하우징과의 밀봉을 파괴하지 않으면서, 위치 센서 독출 헤드가 모터 조립체 하우징에서 다수의 상이한 위치들로 반경 방향으로 조절될 수 있도록 구성되고, 조절 가능 커넥터는 케이싱에 있는 슬롯, 상기 슬롯에 위치한 편심부 및, 세트 스크류들을 포함하고, 상기 편심부는 모터 조립체 하우징에 회전되게 결합되고, 상기 편심부는 위치 센서 독출 헤드의 위치가 모터 조립체 하우징상에서 축방향으로 조절될 수 있도록 슬롯에 맞물리는, 조절 가능 커넥터;를 포함하는, 장치. - 제 1 항에 있어서, 통공을 둘러싸도록 케이싱에 있는 밀봉을 더 포함하고, 상기 밀봉은 케이싱을 모터 조립체 하우징에 밀봉되게 연결하는, 장치.
- 제 1 항에 있어서, 케이싱이 모터 조립체 하우징에 장착될 때 케이싱은 위치 센서 독출 헤드를 모터 조립체 하우징 내측의 환경으로부터 완전하게 격리시키도록 구성되는, 장치.
- 제 1 항에 있어서, 케이싱이 모터 조립체 하우징에 장착될 때, 케이싱은 위치 센서 독출 헤드의 활성 구성 요소(active component)를 모터 조립체 하우징 내측의 환경으로부터 격리시키지 않도록 구성되고, 케이싱이 모터 조립체 하우징에 장착될 때, 케이싱은 위치 센서 독출 헤드의 다른 부분을 모터 조립체 하우징 내측의 환경으로부터 격리시키도록 구성되는, 장치.
- 제 1 항에 있어서, 조절 가능 커넥터는 케이싱을 모터 조립체 하우징에 제거 가능하게 연결하기 위한 제거 가능 커넥터를 포함하는, 장치.
- 제 1 항에 있어서, 위치 센서 독출 헤드는 유도성 독출 헤드(inductive read head)이고, 장치는 위치 센서 독출 헤드에 의해 감지되도록 구성된 견고한 금속의 디스크로서의 기준 부재를 포함하는, 장치.
- 제 1 항에 있어서, 케이싱은 금속을 포함하고, 상기 금속은 모터 조립체 하우징에 부합되는 밀봉(compliant seal)으로 밀봉되게 연결되도록 구성되는, 장치.
- 제 1 항에 있어서, 조절 가능 커넥터는, 통공에서 모터 조립체 하우징과의 밀봉을 파괴하지 않으면서, 위치 센서 독출 헤드가 모터 조립체 하우징에서 축방향으로 조절될 수 있도록 구성되는, 장치.
- 제 1 항에 있어서, 위치 센서 독출 헤드는 모터 조립체 하우징의 외측으로부터 통공을 통해 모터 조립체 하우징의 내측 표면을 지나서 돌출하도록 구성되고, 위치 센서 독출 헤드의 활성 구성 요소는(active component)는 모터 조립체 하우징의 내측 표면을 적어도 부분적으로 지나서 모터 조립체 하우징의 내측에 위치되는, 장치.
- 제 1 항에 있어서, 케이싱은 통공보다 큰 헤드 섹션(head section) 및 통공을 통해 연장되는 샤프트 섹션(shaft section)을 포함하고, 상기 헤드 섹션은 모터 조립체 하우징의 외측에 장착되도록 구성되고 위치되는, 장치.
- 위치 센서 독출 헤드; 및,
상기 위치 센서 독출 헤드를 모터 조립체 하우징에 조절 가능하게 연결하고 상기 모터 조립체 하우징에 대한 위치 센서 독출 헤드의 위치를 다수의 상이한 위치들중 하나에 위치 잠김(locking of location)이 이루어지도록 구성된 조절 가능 커넥터;를 포함하는 장치로서,
조절 가능 커넥터는 모터 조립체 하우징을 통한 통공에서 모터 조립체 하우징 내측의 환경을 모터 조립체 하우징 외측의 환경으로부터 분리되게 유지하기 위하여 상기 통공을 밀봉하도록 구성되고,
위치 센서 독출 헤드는 모터 조립체 하우징 내측의 환경에 위치하는 기준 부재를 독출하도록 구성되고,
조절 가능 커넥터는 모터 조립체 하우징상의 위치 센서 독출 헤드의 위치가 모터 조립체 하우징 외측으로부터 조절될 수 있도록 구성되고, 조절 가능 커넥터는, 통공에서 모터 조립체 하우징과의 밀봉을 파괴하지 않으면서, 위치 센서 독출 헤드가 모터 조립체 하우징에 대하여 반경 방향으로 조절될 수 있고 다수의 상이한 반경 방향 위치들중 하나에 위치 잠김(locking of location)이 이루어지도록 구성되고, 조절 가능 커넥터는 위치 센서 독출 헤드에 연결된 케이싱을 포함하고, 조절 가능 커넥터는 케이싱에 있는 슬롯, 상기 슬롯에 위치한 편심부 및 세트 스크류들을 포함하고, 상기 편심부는 모터 조립체 하우징에 회전되게 결합되고, 상기 편심부는 위치 센서 독출 헤드의 위치가 모터 조립체 하우징상에서 축방향으로 조절될 수 있도록 슬롯에 맞물리는, 장치. - 제 11 항에 있어서, 조절 가능 커넥터는 케이싱의 일부를 모터 조립체 하우징을 향하여 클램핑(clamping)시키도록 구성된 패스너(fasteners)들을 포함하고, 조절 가능 커넥터는 케이싱이 모터 조립체 하우징에서 조절될 수 있게 함으로써 모터 조립체 하우징에 대하여 위치 센서 독출 헤드를 조절하도록 구성되는, 장치.
- 제 11 항에 있어서, 조절 가능 커넥터는, 모터 조립체 하우징 내측의 환경과 모터 조립체 하우징 외측의 환경 사이에 있는 통공에서의 밀봉을 파괴시키지 않으면서, 기준 부재에 대한 위치 센서 독출 헤드의 위치가 조절될 수 있도록 구성되는, 장치.
- 제 11 항에 있어서, 조절 가능 커넥터는 모터 조립체 하우징의 외측에서 통공을 둘러싸도록 구성된 밀봉을 포함하고, 조절 가능 커넥터는 모터 조립체 하우징 내측의 환경과 모터 조립체 하우징 외측의 환경 사이에 있는 통공에서의 밀봉을 유지하면서 기준 부재에 대하여 축방향(axially) 및/또는 각도상의(angular) 움직임을 허용하도록 구성되기도 하는, 장치.
- 제 11 항에 있어서, 케이싱은 모터 조립체 하우징의 돌출부들을 수용하도록 구성된 구멍들을 포함하고, 상기 구멍들은 케이싱이 돌출부들상에서 움직일 수 있도록 돌출부들보다 크고, 케이싱의 위치를 모터 조립체 하우징상에 위치 잠김이 이루어지게 하는 패스너(fasteners)들을 더 포함하는,장치.
- 제 11 항에 있어서, 케이싱은 통공에서 모터 조립체 하우징 내측의 환경을 모터 조립체 하우징 외측의 환경으로부터 분리되게 유지하기 위하여 모터 조립체 하우징을 통한 통공을 밀봉하도록 모터 조립체 하우징에 밀봉되게 연결되게끔 구성되고, 케이싱은 모터 조립체 하우징 내측의 환경으로부터 위치 센서 독출 헤드의 적어도 일부를 격리시키도록 구성된, 장치.
- 제 11 항에 있어서, 위치 센서 독출 헤드는 유도성 독출 헤드(inductive read head)이고, 장치는 위치 센서 독출 헤드에 의해 감지되도록 구성된 단단한 금속의 디스크로서의 기준 부재를 포함하는, 장치.
- 제 11 항에 있어서, 조절 가능 커넥터는 위치 센서 독출 헤드상의 케이싱을 포함하는 제거 가능한 커넥터이고, 상기 제거 가능한 커넥터는 모터 조립체 하우징을 통한 통공에서 위치 센서 독출 헤드를 제거 가능하게 연결하도록 구성되고,
제거 가능한 커넥터는, 통공에서 모터 조립체 하우징 내측의 환경을 모터 조립체 하우징 외측의 환경으로부터 분리되게 유지하기 위하여 모터 조립체 하우징을 통한 통공을 틀어막고 모터 조립체 하우징과 밀봉되며,
제거 가능한 커넥터는 위치 센서 독출 헤드를 통공으로부터 외측으로 당김으로써 위치 센서 독출 헤드가 모터 조립체 하우징으로부터 빠져나갈 수 있도록 구성되는, 장치.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020227007165A KR102499348B1 (ko) | 2011-09-16 | 2012-09-14 | 패시브 회전자를 가진 로봇 구동 |
Applications Claiming Priority (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201161627030P | 2011-09-16 | 2011-09-16 | |
| US61/627,030 | 2011-09-16 | ||
| US201261683297P | 2012-08-15 | 2012-08-15 | |
| US61/683,297 | 2012-08-15 | ||
| PCT/US2012/055505 WO2013040406A1 (en) | 2011-09-16 | 2012-09-14 | Robot drive with passive rotor |
| KR1020147010008A KR102179267B1 (ko) | 2011-09-16 | 2012-09-14 | 패시브 회전자를 가진 로봇 구동 |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020147010008A Division KR102179267B1 (ko) | 2011-09-16 | 2012-09-14 | 패시브 회전자를 가진 로봇 구동 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020227007165A Division KR102499348B1 (ko) | 2011-09-16 | 2012-09-14 | 패시브 회전자를 가진 로봇 구동 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20200123869A KR20200123869A (ko) | 2020-10-30 |
| KR102371755B1 true KR102371755B1 (ko) | 2022-03-07 |
Family
ID=47880001
Family Applications (3)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020227007165A Active KR102499348B1 (ko) | 2011-09-16 | 2012-09-14 | 패시브 회전자를 가진 로봇 구동 |
| KR1020147010008A Active KR102179267B1 (ko) | 2011-09-16 | 2012-09-14 | 패시브 회전자를 가진 로봇 구동 |
| KR1020207030551A Active KR102371755B1 (ko) | 2011-09-16 | 2012-09-14 | 패시브 회전자를 가진 로봇 구동 |
Family Applications Before (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020227007165A Active KR102499348B1 (ko) | 2011-09-16 | 2012-09-14 | 패시브 회전자를 가진 로봇 구동 |
| KR1020147010008A Active KR102179267B1 (ko) | 2011-09-16 | 2012-09-14 | 패시브 회전자를 가진 로봇 구동 |
Country Status (5)
| Country | Link |
|---|---|
| US (4) | US20130069450A1 (ko) |
| JP (4) | JP2014528170A (ko) |
| KR (3) | KR102499348B1 (ko) |
| CN (3) | CN110620473B (ko) |
| WO (1) | WO2013040406A1 (ko) |
Families Citing this family (23)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10476354B2 (en) | 2011-09-16 | 2019-11-12 | Persimmon Technologies Corp. | Robot drive with isolated optical encoder |
| CN110620473B (zh) | 2011-09-16 | 2025-05-06 | 柿子技术公司 | 具有被动转子的机器人驱动器 |
| CN103192384B (zh) * | 2013-03-11 | 2015-08-19 | 上海交通大学 | 一种集成旋转变压器的静态真空轴系装置 |
| US9330951B2 (en) | 2013-06-05 | 2016-05-03 | Persimmon Technologies, Corp. | Robot and adaptive placement system and method |
| US10424498B2 (en) | 2013-09-09 | 2019-09-24 | Persimmon Technologies Corporation | Substrate transport vacuum platform |
| TWI695447B (zh) * | 2013-11-13 | 2020-06-01 | 布魯克斯自動機械公司 | 運送設備 |
| US10348172B2 (en) | 2013-11-13 | 2019-07-09 | Brooks Automation, Inc. | Sealed switched reluctance motor |
| KR20230116962A (ko) | 2013-11-13 | 2023-08-04 | 브룩스 오토메이션 인코퍼레이티드 | 브러쉬리스 전기 기계 제어 방법 및 장치 |
| WO2015073647A1 (en) | 2013-11-13 | 2015-05-21 | Brooks Automation, Inc. | Sealed robot drive |
| KR102424958B1 (ko) | 2014-01-21 | 2022-07-25 | 퍼시몬 테크놀로지스 코포레이션 | 기판 이송 진공 플랫폼 |
| US9478451B2 (en) | 2014-02-10 | 2016-10-25 | Persimmon Technologies, Corp. | Robot having interchangeability features |
| KR102448616B1 (ko) * | 2014-04-21 | 2022-09-28 | 퍼시몬 테크놀로지스 코포레이션 | 격리된 고정자와 인코더를 가진 로봇 |
| US10269606B2 (en) | 2014-05-05 | 2019-04-23 | Persimmon Technologies Corporation | Two-link arm trajectory |
| US10005190B2 (en) | 2014-12-05 | 2018-06-26 | Persimmon Technologies Corporation | Robot with wrist and end effector different materials |
| US10170946B2 (en) | 2015-02-02 | 2019-01-01 | Persimmon Technologies Corporation | Motor having non-circular stator |
| US9616711B1 (en) | 2015-07-03 | 2017-04-11 | Jon Bills | Apparatus, system, and method for achieving magnetically harnessed locomotion of wheeled machines |
| JP6985933B2 (ja) * | 2016-03-21 | 2021-12-22 | パーシモン テクノロジーズ コーポレイションPersimmon Technologies, Corp. | 隔離された光学エンコーダを備えるロボット駆動装置 |
| US10580681B2 (en) * | 2016-07-10 | 2020-03-03 | Yaskawa America Inc. | Robotic apparatus and method for transport of a workpiece |
| CN108584329A (zh) * | 2018-06-04 | 2018-09-28 | 浙江鸿煜科技股份有限公司 | 回转输料装置 |
| CN110936403B (zh) * | 2019-11-30 | 2021-07-06 | 北京思灵机器人科技有限责任公司 | 一种模块化机器人关节、编码器读头位置调节机构及读头位置调节方法 |
| JP2021158751A (ja) * | 2020-03-26 | 2021-10-07 | セイコーエプソン株式会社 | ロボット及びロボットシステム |
| CN115552582A (zh) * | 2020-05-04 | 2022-12-30 | 应用材料公司 | 用于在真空处理系统中运输装置的设备和方法 |
| CN118528243B (zh) * | 2024-07-26 | 2024-11-15 | 苏州纳道精运半导体科技有限公司 | 真空机械臂 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010050114A (ja) | 2008-08-19 | 2010-03-04 | Yaskawa Electric Corp | 精密微動位置決めユニット及びそれを備えたステージ装置 |
| JP2010207938A (ja) * | 2009-03-09 | 2010-09-24 | Yaskawa Electric Corp | 多段モータを駆動源とする基板搬送ロボット |
| JP2011193572A (ja) | 2010-03-12 | 2011-09-29 | Ebara Corp | キャンドモータ及びキャンドモータポンプ |
Family Cites Families (116)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US636808A (en) | 1899-03-04 | 1899-11-14 | Eddie Judy | Spike-puller. |
| US3602748A (en) * | 1969-03-18 | 1971-08-31 | Gilbert I Locke | Double-voltage motor connecting device |
| US3963949A (en) * | 1972-10-26 | 1976-06-15 | General Electric Company | Laminated structure with insulating member formed in situ thereon |
| JPH0119584Y2 (ko) * | 1980-05-09 | 1989-06-06 | ||
| FR2482378A1 (fr) * | 1980-05-09 | 1981-11-13 | Lorette Manufacture Vilebrequi | Rotor avec dispositif de refroidissement notamment du collecteur pour moteurs electriques, son procede et ses moyens de realisation |
| US4414523A (en) * | 1981-09-04 | 1983-11-08 | Micropump Corporation | Encapsulated magnet for magnetic drive |
| DE3205714A1 (de) * | 1982-02-18 | 1983-08-25 | Robert Bosch Gmbh, 7000 Stuttgart | Zuendanlage fuer brennkraftmaschinen |
| US4486677A (en) | 1982-04-30 | 1984-12-04 | Mitsubishi Denki Kabushiki Kaisha | Encased electric motor employing gas as heat dissipating means |
| US4398110A (en) * | 1982-05-05 | 1983-08-09 | Westinghouse Electric Corp. | Harmonic electric actuator |
| JPS5996843A (ja) * | 1982-11-19 | 1984-06-04 | Hitachi Ltd | 水中モータ |
| US4577127A (en) * | 1983-12-21 | 1986-03-18 | Westinghouse Electric Corp. | Lightweight electric robotic actuator |
| US4702668A (en) | 1985-01-24 | 1987-10-27 | Adept Technology, Inc. | Direct drive robotic system |
| US4748355A (en) * | 1985-12-03 | 1988-05-31 | Marathon Electric Manufacturing Corp. | Electrical connector with a releasable load-control element for multi-connectable loads |
| JPH0625933B2 (ja) | 1986-10-02 | 1994-04-06 | 科学技術庁航空宇宙技術研究所長 | 複合偏心型回転子による電動直接駆動位置決め装置 |
| JPH0287959A (ja) * | 1988-09-22 | 1990-03-28 | Mitsubishi Electric Corp | ブラシレスモータ |
| JPH083191Y2 (ja) * | 1989-02-17 | 1996-01-29 | 株式会社安川電機 | キャンドモータ |
| ES2054370T3 (es) * | 1989-08-25 | 1994-08-01 | Siemens Ag | Motor electrico del tipo de construccion cerrado. |
| US5015192A (en) * | 1989-11-13 | 1991-05-14 | Itt Corporation | Contact retention and sealing system |
| US5209699A (en) | 1991-02-26 | 1993-05-11 | Koyo Seiko Co., Ltd | Magnetic drive device |
| EP0512516B1 (en) | 1991-05-08 | 1995-12-20 | Koyo Seiko Co., Ltd. | Magnetic drive device |
| US5113102A (en) | 1991-05-09 | 1992-05-12 | Huntington Mechanical Laboratories, Inc. | Rotary motion transmitter and heat treatment method for sealed chamber |
| US5397212A (en) * | 1992-02-21 | 1995-03-14 | Ebara Corporation | Robot with dust-free and maintenance-free actuators |
| DE4205926A1 (de) * | 1992-02-26 | 1993-09-16 | Magnet Motor Gmbh | Elektrische pumpe |
| JP3113729B2 (ja) | 1992-04-13 | 2000-12-04 | 日本真空技術株式会社 | 同軸駆動部を有する平行リンクロボット |
| US5291087A (en) | 1993-03-03 | 1994-03-01 | Westinghouse Electric Corp. | Sealed electric motor assembly |
| KR100303018B1 (ko) * | 1993-04-16 | 2001-11-22 | 스탠리 디. 피에코스 | 관절형아암이송장치 |
| US5394043A (en) | 1993-06-29 | 1995-02-28 | American Precision Industries Inc. | High speed brushless motor |
| US5522730A (en) * | 1993-07-01 | 1996-06-04 | The Whitaker Corporation | Electrical pin field |
| JPH0819985A (ja) * | 1994-07-04 | 1996-01-23 | Mitsubishi Electric Corp | ロボット装置 |
| JP3375746B2 (ja) | 1994-08-25 | 2003-02-10 | 株式会社アルバック | ロボット制御方法 |
| US5608277A (en) * | 1994-12-22 | 1997-03-04 | Avtron Manufacturing, Inc. | Rotary pulse generator having preset sensor gap |
| US5806169A (en) * | 1995-04-03 | 1998-09-15 | Trago; Bradley A. | Method of fabricating an injected molded motor assembly |
| JP3740770B2 (ja) | 1995-12-28 | 2006-02-01 | 日本精工株式会社 | 密閉型アクチュエ−タ |
| US6102164A (en) | 1996-02-28 | 2000-08-15 | Applied Materials, Inc. | Multiple independent robot assembly and apparatus for processing and transferring semiconductor wafers |
| US5934943A (en) * | 1996-05-14 | 1999-08-10 | Centerpin Technology, Inc. | Electrical connector |
| JP3182502B2 (ja) | 1996-06-03 | 2001-07-03 | 多摩川精機株式会社 | ハイブリッド型ステップモータ |
| JP3726978B2 (ja) | 1996-10-28 | 2005-12-14 | 株式会社安川電機 | 多関節ロボット |
| US5990588A (en) * | 1996-12-13 | 1999-11-23 | General Electric Company | Induction motor driven seal-less pump |
| JPH10248193A (ja) * | 1997-03-03 | 1998-09-14 | Shibaura Eng Works Co Ltd | ポンプ用モータ |
| JPH10322944A (ja) * | 1997-05-19 | 1998-12-04 | Minebea Co Ltd | モータ構造及びその製造方法 |
| US5894760A (en) * | 1997-06-12 | 1999-04-20 | Brooks Automation, Inc. | Substrate transport drive system |
| JP3904723B2 (ja) * | 1998-05-22 | 2007-04-11 | 日本精工株式会社 | Vr型レゾルバ |
| JP4046303B2 (ja) * | 1998-06-08 | 2008-02-13 | 多摩川精機株式会社 | 真空モータ構造 |
| US6485250B2 (en) * | 1998-12-30 | 2002-11-26 | Brooks Automation Inc. | Substrate transport apparatus with multiple arms on a common axis of rotation |
| JP2000258577A (ja) * | 1999-03-08 | 2000-09-22 | Hitachi Ltd | 制御棒駆動制御装置 |
| US6150747A (en) * | 1999-05-04 | 2000-11-21 | Electric Boat Corporation | Composite stator and rotor for an electric motor |
| US6196813B1 (en) * | 1999-07-06 | 2001-03-06 | Flowserve Management Company | Pump assembly including integrated adapter |
| KR100551806B1 (ko) | 1999-09-06 | 2006-02-13 | 동경 엘렉트론 주식회사 | 반도체 처리용 반송 장치 및 수용 장치와, 반도체 처리시스템 |
| JP4445075B2 (ja) * | 1999-10-06 | 2010-04-07 | 東京エレクトロン株式会社 | 真空モータ及び搬送装置 |
| DE19952572A1 (de) * | 1999-11-02 | 2001-06-07 | Brose Fahrzeugteile | Motorische Antriebseinheit mit einer elektronischen Steuerungseinrichtung für Verstelleinrichtungen in Kraftfahrzeugen sowie Verfahren zur Steuerung der Antriebseinheit |
| JP2001257028A (ja) * | 2000-03-10 | 2001-09-21 | Yazaki Corp | コネクタ結合構造 |
| JP2001298920A (ja) | 2000-04-18 | 2001-10-26 | Tamagawa Seiki Co Ltd | 二軸同芯モータ |
| WO2001089064A1 (en) * | 2000-05-19 | 2001-11-22 | Mitsuba Corporation | Motor equipped with rotation sensor |
| DE10026003A1 (de) * | 2000-05-25 | 2001-12-06 | Bosch Gmbh Robert | Stator |
| JP3939101B2 (ja) * | 2000-12-04 | 2007-07-04 | 株式会社荏原製作所 | 基板搬送方法および基板搬送容器 |
| JP3594003B2 (ja) * | 2001-08-28 | 2004-11-24 | 日産自動車株式会社 | 回転電機及びその製造方法 |
| JP2003220586A (ja) | 2002-01-22 | 2003-08-05 | Nissin Electric Co Ltd | 物品搬送ロボット及び真空処理装置 |
| US7891935B2 (en) | 2002-05-09 | 2011-02-22 | Brooks Automation, Inc. | Dual arm robot |
| AU2003244198A1 (en) * | 2002-07-10 | 2004-02-02 | Nikon Corporation | Motor, robot, substrate loader and exposure system |
| US6664535B1 (en) | 2002-07-16 | 2003-12-16 | Mitutoyo Corporation | Scale structures and methods usable in an absolute position transducer |
| US7988398B2 (en) * | 2002-07-22 | 2011-08-02 | Brooks Automation, Inc. | Linear substrate transport apparatus |
| SE0202445L (sv) * | 2002-08-19 | 2004-02-20 | Abb Ab | Anordning vid en industrirobot |
| JP4207530B2 (ja) | 2002-10-28 | 2009-01-14 | 東京エレクトロン株式会社 | 被処理体の搬送機構 |
| US6700249B1 (en) | 2002-11-19 | 2004-03-02 | Aerotech, Inc. | Direct drive vertical lift and rotation stage |
| DE602004011693T2 (de) | 2003-02-10 | 2009-01-29 | Fanuc Ltd | Erdungsanordnung für einen elektrischen Motor mit einem Kodierer |
| PL1641107T3 (pl) * | 2003-06-27 | 2016-10-31 | Silnik krokowy i sposób jego wytwarzania | |
| DE10332167A1 (de) * | 2003-07-15 | 2005-02-10 | Pwb-Ruhlatec Industrieprodukte Gmbh | Encodersystem und Verfahren zur Montage eines Encodersystems |
| CN2669461Y (zh) * | 2003-12-31 | 2005-01-05 | 中国北车集团永济电机厂 | 低温升电机 |
| JP4732716B2 (ja) | 2004-06-29 | 2011-07-27 | 株式会社アルバック | 搬送装置及びその制御方法並びに真空処理装置 |
| US7704036B2 (en) | 2004-07-09 | 2010-04-27 | Rorze Corporation | Drive source and transportation robot |
| DE102004045992A1 (de) | 2004-09-22 | 2006-04-06 | Siemens Ag | Elektrische Maschine |
| CN1942288B (zh) * | 2005-02-12 | 2010-12-22 | 应用材料公司 | 一种多轴真空电机组件 |
| DE102005019112A1 (de) * | 2005-04-25 | 2006-10-26 | Siemens Ag | Kombinationsantrieb mit Hybridreluktanzmotor |
| JP2008541691A (ja) * | 2005-05-17 | 2008-11-20 | フェデラル−モーグル コーポレイション | 封入された回路基板を有するbldcモータおよびポンプアセンブリ |
| CA2610798A1 (en) * | 2005-06-10 | 2006-12-14 | Magna Closures Inc. | Motor drive assembly |
| JP2007052770A (ja) * | 2005-07-21 | 2007-03-01 | Omron Corp | 監視装置 |
| GB2428903B (en) * | 2005-08-03 | 2009-10-07 | Imra Europ S A S Uk Res Ct | Salient pole electrical machine |
| DE102005062021A1 (de) * | 2005-12-22 | 2007-06-28 | Mahle International Gmbh | Elektromotor |
| JP4848845B2 (ja) * | 2006-06-01 | 2011-12-28 | 株式会社安川電機 | 真空ロボット、処理装置、モータの製造方法、およびモータ |
| JP5291285B2 (ja) * | 2006-07-11 | 2013-09-18 | サンデン株式会社 | 電動圧縮機の密封端子装置 |
| JP4941782B2 (ja) * | 2006-08-18 | 2012-05-30 | 株式会社Ihi | 電動過給機 |
| JP5052069B2 (ja) * | 2006-08-22 | 2012-10-17 | 日本電産サンキョー株式会社 | モータアクチュエータ |
| KR100774215B1 (ko) * | 2006-09-15 | 2007-11-08 | 엘지전자 주식회사 | 수분침투 방지 구조를 갖는 모터 |
| JP2008187828A (ja) * | 2007-01-30 | 2008-08-14 | Toyota Industries Corp | 永久磁石型回転電機の回転子 |
| US7898135B2 (en) * | 2007-03-07 | 2011-03-01 | Qm Power, Inc. | Hybrid permanent magnet motor |
| JP5543336B2 (ja) * | 2007-05-18 | 2014-07-09 | ブルックス オートメーション インコーポレイテッド | 高速スワップロボット付コンパクト基板搬送システム |
| US8283813B2 (en) * | 2007-06-27 | 2012-10-09 | Brooks Automation, Inc. | Robot drive with magnetic spindle bearings |
| KR20100056468A (ko) * | 2007-07-17 | 2010-05-27 | 브룩스 오토메이션 인코퍼레이티드 | 챔버 벽들에 일체화된 모터들을 갖는 기판 처리 장치 |
| JP5110637B2 (ja) * | 2007-08-02 | 2012-12-26 | 日新製鋼株式会社 | ヒステリシスモータ及びヒステリシスモータ用ロータの製造方法 |
| CN201100190Y (zh) * | 2007-08-30 | 2008-08-13 | 重庆巨升电器有限公司 | 调节控制流体流量的电动阀 |
| US7880356B2 (en) * | 2007-10-02 | 2011-02-01 | Seiko Epson Corporation | Brushless electric machine |
| DE202007016161U1 (de) * | 2007-11-16 | 2009-03-26 | Dinse Gmbh | Roboterhalterung für fluidgekühlte Fügewerkzeuge |
| DE102007063307A1 (de) * | 2007-12-28 | 2009-07-02 | Robert Bosch Gmbh | Montageverfahren zum Einpassen eines Permanentmagneten in ein Halteelement |
| JP5062484B2 (ja) * | 2008-04-07 | 2012-10-31 | アイシン・エィ・ダブリュ株式会社 | 駆動装置 |
| US7847442B2 (en) * | 2008-04-22 | 2010-12-07 | Nti Ag | Linear motor |
| JP5045550B2 (ja) * | 2008-05-21 | 2012-10-10 | 株式会社豊田自動織機 | 電動コンプレッサ |
| DE102008025955B3 (de) * | 2008-05-30 | 2009-12-03 | Concentrix Solar Gmbh | Elektrischer, wasserdampfdiffusionsdichter Steckverbinder |
| JP5288164B2 (ja) * | 2008-06-11 | 2013-09-11 | 日本精工株式会社 | スカラーロボット |
| WO2010014640A2 (en) * | 2008-07-28 | 2010-02-04 | Direct Drive Systems, Inc. | Electric machine |
| JP5262412B2 (ja) * | 2008-08-07 | 2013-08-14 | シンフォニアテクノロジー株式会社 | 真空処理装置 |
| CN101764446B (zh) * | 2008-12-24 | 2013-06-12 | 德昌电机(深圳)有限公司 | 电机定子及其制造方法 |
| JP2010225580A (ja) * | 2009-02-25 | 2010-10-07 | Three M Innovative Properties Co | 電気コネクタ |
| US20110256003A1 (en) * | 2009-05-20 | 2011-10-20 | Ulvac, Inc. | Dry vacuum pump |
| JP4792517B2 (ja) | 2009-07-07 | 2011-10-12 | 日本航空電子工業株式会社 | コネクタ組立体 |
| WO2011022483A1 (en) * | 2009-08-18 | 2011-02-24 | Itt Manufacturing Enterprises, Inc. | Encapsulated submersible pump |
| FR2951403B1 (fr) | 2009-10-15 | 2011-12-23 | Salomon Sas | Jante composite et roue comportant une telee jante |
| JP2011205878A (ja) * | 2009-12-25 | 2011-10-13 | Canon Anelva Corp | 真空アクチュエータ及び基板搬送ロボット |
| FR2959623B1 (fr) * | 2010-04-30 | 2013-03-15 | Souriau | Dispositif de couplage d'un moteur asynchrone a un cable d'alimentation electrique, moteur asynchrone, et procede de couplage d'un moteur asynchrone a un cable d'alimentation electrique |
| KR20250119665A (ko) | 2011-09-16 | 2025-08-07 | 퍼시몬 테크놀로지스 코포레이션 | 운송 장치 및 이를 포함하는 처리 장치 |
| CN110620473B (zh) | 2011-09-16 | 2025-05-06 | 柿子技术公司 | 具有被动转子的机器人驱动器 |
| US9202733B2 (en) * | 2011-11-07 | 2015-12-01 | Persimmon Technologies Corporation | Robot system with independent arms |
| DE202012011808U1 (de) * | 2012-12-10 | 2014-03-13 | Rosenberger Hochfrequenztechnik Gmbh & Co. Kg | Verbindungsvorrichtung |
| KR102424958B1 (ko) | 2014-01-21 | 2022-07-25 | 퍼시몬 테크놀로지스 코포레이션 | 기판 이송 진공 플랫폼 |
| KR102448616B1 (ko) | 2014-04-21 | 2022-09-28 | 퍼시몬 테크놀로지스 코포레이션 | 격리된 고정자와 인코더를 가진 로봇 |
| US9768542B2 (en) * | 2014-12-31 | 2017-09-19 | Borgwarner Inc. | Blind electrical connector to printed circuit board in housing |
| CN107206916B (zh) | 2015-02-06 | 2021-04-06 | 柿子技术公司 | 可移动功率耦合以及具有可移动功率耦合的机器人 |
-
2012
- 2012-09-14 CN CN201911054215.0A patent/CN110620473B/zh active Active
- 2012-09-14 CN CN201610105805.1A patent/CN105703542B/zh active Active
- 2012-09-14 KR KR1020227007165A patent/KR102499348B1/ko active Active
- 2012-09-14 JP JP2014530872A patent/JP2014528170A/ja active Pending
- 2012-09-14 KR KR1020147010008A patent/KR102179267B1/ko active Active
- 2012-09-14 US US13/618,315 patent/US20130069450A1/en not_active Abandoned
- 2012-09-14 WO PCT/US2012/055505 patent/WO2013040406A1/en not_active Ceased
- 2012-09-14 KR KR1020207030551A patent/KR102371755B1/ko active Active
- 2012-09-14 CN CN201280055476.4A patent/CN103930363B/zh active Active
-
2013
- 2013-01-18 US US13/744,966 patent/US8716909B2/en active Active
- 2013-01-18 US US13/744,900 patent/US9800114B2/en active Active
-
2016
- 2016-10-21 JP JP2016206769A patent/JP6696882B2/ja active Active
- 2016-10-21 JP JP2016206770A patent/JP6450725B2/ja active Active
-
2017
- 2017-10-20 US US15/789,382 patent/US10020704B2/en active Active
-
2018
- 2018-08-23 JP JP2018155896A patent/JP6901444B2/ja active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010050114A (ja) | 2008-08-19 | 2010-03-04 | Yaskawa Electric Corp | 精密微動位置決めユニット及びそれを備えたステージ装置 |
| JP2010207938A (ja) * | 2009-03-09 | 2010-09-24 | Yaskawa Electric Corp | 多段モータを駆動源とする基板搬送ロボット |
| JP2011193572A (ja) | 2010-03-12 | 2011-09-29 | Ebara Corp | キャンドモータ及びキャンドモータポンプ |
Also Published As
| Publication number | Publication date |
|---|---|
| US8716909B2 (en) | 2014-05-06 |
| KR20200123869A (ko) | 2020-10-30 |
| US9800114B2 (en) | 2017-10-24 |
| JP2019041572A (ja) | 2019-03-14 |
| JP2017050552A (ja) | 2017-03-09 |
| US10020704B2 (en) | 2018-07-10 |
| CN105703542A (zh) | 2016-06-22 |
| KR20140084038A (ko) | 2014-07-04 |
| JP2014528170A (ja) | 2014-10-23 |
| JP6901444B2 (ja) | 2021-07-14 |
| JP6450725B2 (ja) | 2019-01-09 |
| JP2017063204A (ja) | 2017-03-30 |
| US20140077629A1 (en) | 2014-03-20 |
| US20180041089A1 (en) | 2018-02-08 |
| CN110620473B (zh) | 2025-05-06 |
| US20130069450A1 (en) | 2013-03-21 |
| US20140077637A1 (en) | 2014-03-20 |
| CN110620473A (zh) | 2019-12-27 |
| WO2013040406A1 (en) | 2013-03-21 |
| US20150145357A9 (en) | 2015-05-28 |
| JP6696882B2 (ja) | 2020-05-20 |
| KR20220034254A (ko) | 2022-03-17 |
| CN103930363A (zh) | 2014-07-16 |
| KR102179267B1 (ko) | 2020-11-16 |
| KR102499348B1 (ko) | 2023-02-13 |
| CN103930363B (zh) | 2016-10-12 |
| CN105703542B (zh) | 2019-11-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102371755B1 (ko) | 패시브 회전자를 가진 로봇 구동 | |
| JP2014528170A5 (ko) | ||
| JP7702377B2 (ja) | 密封型ロボット駆動部 | |
| JP2017514441A (ja) | 隔離された固定子およびエンコーダを備えるロボット | |
| EP3068591B1 (en) | Sealed robot drive |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A107 | Divisional application of patent | ||
| PA0104 | Divisional application for international application |
St.27 status event code: A-0-1-A10-A18-div-PA0104 St.27 status event code: A-0-1-A10-A16-div-PA0104 |
|
| PG1501 | Laying open of application |
St.27 status event code: A-1-1-Q10-Q12-nap-PG1501 |
|
| A201 | Request for examination | ||
| PA0201 | Request for examination |
St.27 status event code: A-1-2-D10-D11-exm-PA0201 |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
St.27 status event code: A-1-2-D10-D21-exm-PE0902 |
|
| AMND | Amendment | ||
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| E601 | Decision to refuse application | ||
| PE0601 | Decision on rejection of patent |
St.27 status event code: N-2-6-B10-B15-exm-PE0601 |
|
| X091 | Application refused [patent] | ||
| T11-X000 | Administrative time limit extension requested |
St.27 status event code: U-3-3-T10-T11-oth-X000 |
|
| T13-X000 | Administrative time limit extension granted |
St.27 status event code: U-3-3-T10-T13-oth-X000 |
|
| T11-X000 | Administrative time limit extension requested |
St.27 status event code: U-3-3-T10-T11-oth-X000 |
|
| T13-X000 | Administrative time limit extension granted |
St.27 status event code: U-3-3-T10-T13-oth-X000 |
|
| AMND | Amendment | ||
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| PX0901 | Re-examination |
St.27 status event code: A-2-3-E10-E12-rex-PX0901 |
|
| PX0701 | Decision of registration after re-examination |
St.27 status event code: A-3-4-F10-F13-rex-PX0701 |
|
| X701 | Decision to grant (after re-examination) | ||
| A107 | Divisional application of patent | ||
| GRNT | Written decision to grant | ||
| PA0104 | Divisional application for international application |
St.27 status event code: A-0-1-A10-A18-div-PA0104 St.27 status event code: A-0-1-A10-A16-div-PA0104 |
|
| PR0701 | Registration of establishment |
St.27 status event code: A-2-4-F10-F11-exm-PR0701 |
|
| PR1002 | Payment of registration fee |
St.27 status event code: A-2-2-U10-U12-oth-PR1002 Fee payment year number: 1 |
|
| PG1601 | Publication of registration |
St.27 status event code: A-4-4-Q10-Q13-nap-PG1601 |
|
| R18-X000 | Changes to party contact information recorded |
St.27 status event code: A-5-5-R10-R18-oth-X000 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 4 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-4-4-P10-P22-nap-X000 |