JP7294271B2 - 電気自動車 - Google Patents
電気自動車 Download PDFInfo
- Publication number
- JP7294271B2 JP7294271B2 JP2020135126A JP2020135126A JP7294271B2 JP 7294271 B2 JP7294271 B2 JP 7294271B2 JP 2020135126 A JP2020135126 A JP 2020135126A JP 2020135126 A JP2020135126 A JP 2020135126A JP 7294271 B2 JP7294271 B2 JP 7294271B2
- Authority
- JP
- Japan
- Prior art keywords
- torque
- mode
- vehicle
- motor
- pedal
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images









Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L15/00—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles
- B60L15/20—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles for control of the vehicle or its driving motor to achieve a desired performance, e.g. speed, torque, programmed variation of speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L50/00—Electric propulsion with power supplied within the vehicle
- B60L50/10—Electric propulsion with power supplied within the vehicle using propulsion power supplied by engine-driven generators, e.g. generators driven by combustion engines
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L15/00—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles
- B60L15/20—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles for control of the vehicle or its driving motor to achieve a desired performance, e.g. speed, torque, programmed variation of speed
- B60L15/2054—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles for control of the vehicle or its driving motor to achieve a desired performance, e.g. speed, torque, programmed variation of speed by controlling transmissions or clutches
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K1/00—Arrangement or mounting of electrical propulsion units
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K20/00—Arrangement or mounting of change-speed gearing control devices in vehicles
- B60K20/02—Arrangement or mounting of change-speed gearing control devices in vehicles of initiating means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K23/00—Arrangement or mounting of control devices for vehicle transmissions, or parts thereof, not otherwise provided for
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K23/00—Arrangement or mounting of control devices for vehicle transmissions, or parts thereof, not otherwise provided for
- B60K23/02—Arrangement or mounting of control devices for vehicle transmissions, or parts thereof, not otherwise provided for for main transmission clutches
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K26/00—Arrangement or mounting of propulsion-unit control devices in vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K26/00—Arrangement or mounting of propulsion-unit control devices in vehicles
- B60K26/02—Arrangement or mounting of propulsion-unit control devices in vehicles of initiating means or elements
- B60K26/021—Arrangement or mounting of propulsion-unit control devices in vehicles of initiating means or elements with means for providing feel, e.g. by changing pedal force characteristics
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L15/00—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles
- B60L15/20—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles for control of the vehicle or its driving motor to achieve a desired performance, e.g. speed, torque, programmed variation of speed
- B60L15/28—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles for control of the vehicle or its driving motor to achieve a desired performance, e.g. speed, torque, programmed variation of speed without contact making and breaking, e.g. using a transductor
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K26/00—Arrangement or mounting of propulsion-unit control devices in vehicles
- B60K26/02—Arrangement or mounting of propulsion-unit control devices in vehicles of initiating means or elements
- B60K2026/025—Input devices for controlling electric drive motors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/10—Vehicle control parameters
- B60L2240/14—Acceleration
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/42—Drive Train control parameters related to electric machines
- B60L2240/421—Speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/42—Drive Train control parameters related to electric machines
- B60L2240/423—Torque
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/46—Drive Train control parameters related to wheels
- B60L2240/461—Speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/50—Drive Train control parameters related to clutches
- B60L2240/507—Operating parameters
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/60—Navigation input
- B60L2240/68—Traffic data
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2250/00—Driver interactions
- B60L2250/26—Driver interactions by pedal actuation
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2260/00—Operating Modes
- B60L2260/20—Drive modes; Transition between modes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2260/00—Operating Modes
- B60L2260/20—Drive modes; Transition between modes
- B60L2260/26—Transition between different drive modes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2260/00—Operating Modes
- B60L2260/40—Control modes
- B60L2260/44—Control modes by parameter estimation
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Y—INDEXING SCHEME RELATING TO ASPECTS CROSS-CUTTING VEHICLE TECHNOLOGY
- B60Y2200/00—Type of vehicle
- B60Y2200/90—Vehicles comprising electric prime movers
- B60Y2200/91—Electric vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Y—INDEXING SCHEME RELATING TO ASPECTS CROSS-CUTTING VEHICLE TECHNOLOGY
- B60Y2300/00—Purposes or special features of road vehicle drive control systems
- B60Y2300/60—Control of electric machines, e.g. problems related to electric motors or generators
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Y—INDEXING SCHEME RELATING TO ASPECTS CROSS-CUTTING VEHICLE TECHNOLOGY
- B60Y2400/00—Special features of vehicle units
- B60Y2400/30—Sensors
- B60Y2400/301—Sensors for position or displacement
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/64—Electric machine technologies in electromobility
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/7072—Electromobility specific charging systems or methods for batteries, ultracapacitors, supercapacitors or double-layer capacitors
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/72—Electric energy management in electromobility
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T90/00—Enabling technologies or technologies with a potential or indirect contribution to GHG emissions mitigation
- Y02T90/10—Technologies relating to charging of electric vehicles
- Y02T90/16—Information or communication technologies improving the operation of electric vehicles
Landscapes
- Engineering & Computer Science (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Power Engineering (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
- Hybrid Electric Vehicles (AREA)
Description
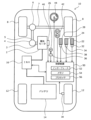
図1は、本実施の形態に係る電気自動車10の動力系の構成を模式的に示す図である。図1に示すように、電気自動車10は、動力源として電気モータ2を備えている。電気モータ2は、例えばブラシレスDCモータや三相交流同期モータである。電気モータ2には、その回転速度を検出するための回転速度センサ40が設けられている。電気モータ2の出力軸3は、ギア機構4を介してプロペラシャフト5の一端に接続されている。プロペラシャフト5の他端は、デファレンシャルギア6を介して、車両前方のドライブシャフト7に接続されている。
2-1.モータトルク算出機能
図3は、本実施の形態に係る制御装置50の機能、特に、電気モータ2に対するモータトルク指令値の算出に係る機能を示すブロック図である。制御装置50は、このブロック図に示された機能によりモータトルク指令値を計算し、モータトルク指令値に基づいてインバータ16をPWM制御するための制御信号を生成する。
MT車両における駆動輪トルクは、エンジンに対する燃料供給を制御するガスペダルの操作と、MTのギア段を切り替えるシフトレバー(シフト装置)の操作と、エンジンとMTとの間のクラッチを動作させるクラッチペダルの操作とによって決定付けられる。MT車両モデル530は、電気自動車10がエンジン、クラッチ、及びMTを備えているのであれば、アクセルペダル22、疑似クラッチペダル28、及び疑似シフトレバー26の操作によって得られる駆動輪トルクを計算するモデルである。以下、MTモードにおいて、MT車両モデル530により仮想的に実現されるエンジン、クラッチ、及びMTを仮想エンジン、仮想クラッチ、仮想MTと称する。
図4は、EVモードでのモータトルクの計算に用いられモータトルク指令マップ550の一例を示す図である。モータトルク指令マップ550は、アクセル開度とPapと電気モータ2の回転速度とをパラメータとしてモータトルクを決定するマップである。モータトルク指令マップ550の各パラメータには、アクセルポジションセンサ32の信号と、回転速度センサ40の信号とが入力される。モータトルク指令マップ550からは、これらの信号に対応するモータトルクが出力される。
モータトルク指令マップ550を用いて計算されたモータトルクをTevと表記し、MT車両モデル530及び要求モータトルク計算部540を用いて計算されたモータトルクをTmtと表記する。2つのモータトルクTev,Tmtのうち切替スイッチ560によって選択されたモータトルクが、電気モータ2に対してモータトルク指令値として与えられる。
2-5-1.概要
次に、MT車両モデル530について説明する。図5は、MT車両モデル530の一例を示すブロック図である。MT車両モデル530は、エンジンモデル531と、クラッチモデル532と、MTモデル533と、車軸・駆動輪モデル534とから構成されている。エンジンモデル531では、仮想エンジンがモデル化されている。クラッチモデル532では、仮想クラッチがモデル化されている。MTモデル533は、仮想MTがモデル化されている。車軸・駆動輪モデル534では、車軸から駆動輪までの仮想のトルク伝達系がモデル化されている。各モデルは計算式で表されてもよいしマップで表されてもよい。
エンジンモデル531は、仮想エンジン回転速度Neと仮想エンジン出力トルクTeoutを算出する。エンジンモデル531は、仮想エンジン回転速度Neを計算するモデルと仮想エンジン出力トルクTeoutを計算するモデルから構成される。仮想エンジン回転速度Neの計算には、例えば、次式(1)で表されるモデルが用いられる。次式(1)では、車輪8の回転速度Nw、総合減速比R、及び仮想クラッチのスリップ率slipから仮想エンジン回転速度Neが算出される。
クラッチモデル532は、トルク伝達ゲインkを算出する。トルク伝達ゲインkは、疑似クラッチペダル28の踏み込み量に応じた仮想クラッチのトルク伝達度合いを算出するためのゲインである。クラッチモデル532は、例えば、図7に示すようなマップを有する。このマップでは、クラッチペダル踏み込み量Pcに対してトルク伝達ゲインkが与えられる。図7でトルク伝達ゲインkは、クラッチペダル踏み込み量PcがPc0からPc1の範囲で1となり、クラッチペダル踏み込み量PcがPc1からPc2の範囲で0まで一定の傾きで単調減少し、クラッチペダル踏み込み量PcがPc2からPc3の範囲で0となるように与えられる。ここで、Pc0はクラッチペダル踏み込み量Pcが0%の位置に対応し、Pc1はクラッチペダル踏み込み時の遊び限界の位置に対応し、Pc3はクラッチペダル踏み込み量Pcが100%の位置に対応し、Pc2はPc3からの戻し時の遊び限界の位置に対応している。
MTモデル533は、ギア比(変速比)rを算出する。ギア比rは、仮想MTにおいて疑似シフトレバー26のシフトポジションSpにより決まるギア比である。疑似シフトレバー26のシフトポジションSpと仮想MTのギア段とは一対一の関係にある。MTモデル533は、例えば、図8に示すようなマップを有する。このマップでは、ギア段に対してギア比rが与えられる。図8に示すように、ギア段が大きいほどギア比rは小さくなる。
車軸・駆動輪モデル534は、所定の減速比rrを用いて駆動輪トルクTwを算出する。減速比rrは、仮想MTから駆動輪8までの機械的な構造により決まる固定値である。減速比rrにギア比rを乗じて得られる値が前述の総合減速比Rである。車軸・駆動輪モデル534は、例えば、次式(5)により、変速機出力トルクTgout、及び減速比rrから駆動輪トルクTwを算出する。車軸・駆動輪モデル534算出された駆動輪トルクTwは、要求モータトルク計算部540に出力される。
要求モータトルク計算部540は、MT車両モデル530で算出された駆動輪トルクTwをモータトルクに変換する。図9は、MTモードで実現される電気モータ2のトルク特性、詳しくは、モータ回転速度に対するモータトルクの特性を、EV走行モードで実現される電気モータ2のトルク特性と比較して示す図である。MTモードの場合、図9に示されるように、疑似シフトレバー26により設定されるギア段に応じてMT車両のトルク特性を模擬するようなトルク特性(図中実線)を実現することができる。
図10は、EVモードでのモータトルクの応答特性と、MTモードでのモータトルクの応答特性とを比較して示す図である。下段のグラフに破線で示すように、EVモードにおいて電気モータ2が出力するモータトルクは、アクセル開度に対して略リニアに応答する。これは、電気モータ2が本来有するモータトルクの応答特性そのものである。よって、EVモードでは、運転者は、モータトルクのリニアな応答特性によって実現される、EVならではの運転感覚を楽しむことができる。
上記実施形態に係る電気自動車10は、1つの電気モータ2で前輪を駆動するFF車である。しかし、電気モータを前と後ろに2基配置し、前輪と後輪のそれぞれを駆動する電気自動車にも本発明は適用可能である。また、本発明は、各輪にインホイールモータを備える電気自動車にも適用可能である。これらの場合のMT車両モデルには、MT付き全輪駆動車をモデル化したものを用いることができる。
8 駆動輪
10 電気自動車
16 インバータ
22 アクセルペダル
26 疑似シフトレバー(疑似シフト装置)
28 疑似クラッチペダル
30 車輪速センサ
40 回転速度センサ
42 モード選択スイッチ
44 疑似エンジン回転速度メーター
50 制御装置
520 制御信号算出部
530 MT車両モデル
540 要求モータトルク計算部
550 モータトルク指令マップ
560 切替スイッチ
Claims (1)
- 電気モータを走行用の動力装置として用いる電気自動車であって、
加速用ペダルと、
疑似クラッチペダルと、
疑似シフト装置と、
前記電気モータの制御モードを第1モードと第2モードとの間で手動或いは自動で選択するモード選択装置と、
前記モード選択装置で選択された前記制御モードに従い前記電気モータが出力するモータトルクを制御する制御装置と、を備え、
前記制御装置は、
メモリと、
プロセッサと、を備え、
前記メモリは、
ガスペダルの操作によってトルクを制御される内燃機関と、クラッチペダルの操作とシフト装置の操作とによってギア段が切り替えられるマニュアルトランスミッションと、を有するMT車両における駆動輪トルクのトルク特性を模擬したMT車両モデルと、
前記加速用ペダルの操作量と前記電気モータの回転速度に対する前記モータトルクの関係を規定したモータトルク指令マップと、を記憶し、
前記プロセッサは、
前記第1モードで前記電気モータを制御する場合には、
前記加速用ペダルの操作量を、前記MT車両モデルに対する前記ガスペダルの操作量の入力として受け付ける処理と、
前記疑似クラッチペダルの操作量を、前記MT車両モデルに対する前記クラッチペダルの操作量の入力として受け付ける処理と、
前記疑似シフト装置のシフト位置を、前記MT車両モデルに対する前記シフト装置のシフト位置の入力として受け付ける処理と、
前記ガスペダルの操作量と、前記クラッチペダルの操作量と、前記シフト装置のシフト位置とで定まる前記駆動輪トルクを、前記MT車両モデルを用いて計算する処理と、
前記駆動輪トルクを前記電気自動車の駆動輪に与えるための前記モータトルクを演算する処理と、を実行し、
前記第2モードで前記電気モータを制御する場合には、
前記疑似クラッチペダルの操作と前記疑似シフト装置の操作とを無効にする処理と、
前記加速用ペダルの操作量と前記電気モータの回転速度とに基づき、前記モータトルク指令マップを用いて前記モータトルクを演算する処理と、を実行し、
前記第1モードでは、前記第2モードに比較して、前記加速用ペダルの操作量の変化に対する前記モータトルクの応答性を低くするように前記電気モータを制御する
ことを特徴とする電気自動車。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020135126A JP7294271B2 (ja) | 2020-08-07 | 2020-08-07 | 電気自動車 |
| US17/352,979 US11833908B2 (en) | 2020-08-07 | 2021-06-21 | Electric vehicle |
| CN202110880053.7A CN114056114B (zh) | 2020-08-07 | 2021-08-02 | 电动汽车 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020135126A JP7294271B2 (ja) | 2020-08-07 | 2020-08-07 | 電気自動車 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2022030840A JP2022030840A (ja) | 2022-02-18 |
| JP7294271B2 true JP7294271B2 (ja) | 2023-06-20 |
Family
ID=80113581
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2020135126A Active JP7294271B2 (ja) | 2020-08-07 | 2020-08-07 | 電気自動車 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US11833908B2 (ja) |
| JP (1) | JP7294271B2 (ja) |
| CN (1) | CN114056114B (ja) |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7298566B2 (ja) | 2020-08-07 | 2023-06-27 | トヨタ自動車株式会社 | 電気自動車 |
| KR20220067067A (ko) * | 2020-11-17 | 2022-05-24 | 현대자동차주식회사 | 가상 구동계 감성 구현을 위한 전기자동차의 제어 장치 및 방법 |
| CN115544715A (zh) * | 2022-08-12 | 2022-12-30 | 三一重机有限公司 | 简易模型的构建方法,作业的控制方法及系统、搅拌站 |
| JP7416300B1 (ja) * | 2023-03-09 | 2024-01-17 | トヨタ自動車株式会社 | 電気自動車 |
| JP7491428B1 (ja) * | 2023-03-16 | 2024-05-28 | トヨタ自動車株式会社 | 電気自動車 |
| JP2025078293A (ja) * | 2023-11-08 | 2025-05-20 | トヨタ自動車株式会社 | 電気自動車 |
| JP2026052801A (ja) * | 2024-09-12 | 2026-03-25 | トヨタ自動車株式会社 | 電気自動車 |
| CN120145708B (zh) * | 2025-05-15 | 2025-08-22 | 山东大学 | 一种风电机组精细化接口仿真方法、系统、终端及介质 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010202123A (ja) | 2009-03-05 | 2010-09-16 | Nissan Motor Co Ltd | 電動車両の制御装置 |
| JP2018166386A (ja) | 2017-03-28 | 2018-10-25 | 株式会社Subaru | 車両 |
| JP2020068549A (ja) | 2018-10-22 | 2020-04-30 | スズキ株式会社 | 電動車両 |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4457981B2 (ja) * | 2005-05-26 | 2010-04-28 | トヨタ自動車株式会社 | 車両用駆動装置の制御装置 |
| US7527028B2 (en) * | 2006-03-09 | 2009-05-05 | Ford Global Technologies, Llc | Hybrid vehicle system having engine with variable valve operation |
| JP2009029261A (ja) | 2007-07-26 | 2009-02-12 | Toyota Motor Corp | 車両用駆動力制御装置 |
| JP2010012889A (ja) * | 2008-07-02 | 2010-01-21 | Honda Motor Co Ltd | 車両の駆動力制御装置 |
| JP5648698B2 (ja) * | 2013-01-22 | 2015-01-07 | トヨタ自動車株式会社 | ハイブリッド車両の制御装置 |
| JP6350208B2 (ja) * | 2014-10-24 | 2018-07-04 | トヨタ自動車株式会社 | 自動車 |
| JP6659459B2 (ja) * | 2016-05-20 | 2020-03-04 | 本田技研工業株式会社 | 車両 |
| JP6924067B2 (ja) | 2017-04-28 | 2021-08-25 | 株式会社Subaru | 車両 |
| CN108437852B (zh) * | 2018-05-16 | 2021-06-04 | 江铃汽车股份有限公司 | 电动汽车从小于蠕行速度过渡到蠕行时的扭矩控制方法 |
| CN109177742B (zh) * | 2018-08-17 | 2020-06-23 | 北京航空航天大学 | 一种电动汽车模拟手动挡燃油车扭矩控制方法 |
-
2020
- 2020-08-07 JP JP2020135126A patent/JP7294271B2/ja active Active
-
2021
- 2021-06-21 US US17/352,979 patent/US11833908B2/en active Active
- 2021-08-02 CN CN202110880053.7A patent/CN114056114B/zh active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010202123A (ja) | 2009-03-05 | 2010-09-16 | Nissan Motor Co Ltd | 電動車両の制御装置 |
| JP2018166386A (ja) | 2017-03-28 | 2018-10-25 | 株式会社Subaru | 車両 |
| JP2020068549A (ja) | 2018-10-22 | 2020-04-30 | スズキ株式会社 | 電動車両 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2022030840A (ja) | 2022-02-18 |
| CN114056114A (zh) | 2022-02-18 |
| US20220041065A1 (en) | 2022-02-10 |
| US11833908B2 (en) | 2023-12-05 |
| CN114056114B (zh) | 2023-11-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7294272B2 (ja) | 電気自動車 | |
| JP7294271B2 (ja) | 電気自動車 | |
| JP7302548B2 (ja) | 電気自動車 | |
| EP3854626B1 (en) | Electric vehicle | |
| JP7298565B2 (ja) | 電気自動車 | |
| JP7279692B2 (ja) | 電気自動車 | |
| JP7468759B2 (ja) | 電気自動車 | |
| US12533964B2 (en) | Electric vehicle | |
| JP7666670B2 (ja) | 電気自動車 | |
| JP7673851B2 (ja) | 電気自動車 | |
| JP7413952B2 (ja) | 電気自動車 | |
| JP7413959B2 (ja) | 電気自動車 | |
| JP7413951B2 (ja) | 電気自動車 | |
| JP2025108151A (ja) | 電気自動車 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20220809 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20230509 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20230510 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20230522 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 7294271 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |