JP7262948B2 - 携帯機、携帯機に適用される通信制御方法 - Google Patents
携帯機、携帯機に適用される通信制御方法 Download PDFInfo
- Publication number
- JP7262948B2 JP7262948B2 JP2018168388A JP2018168388A JP7262948B2 JP 7262948 B2 JP7262948 B2 JP 7262948B2 JP 2018168388 A JP2018168388 A JP 2018168388A JP 2018168388 A JP2018168388 A JP 2018168388A JP 7262948 B2 JP7262948 B2 JP 7262948B2
- Authority
- JP
- Japan
- Prior art keywords
- portable device
- vehicle
- positioning
- signal
- distance
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images













Landscapes
- Lock And Its Accessories (AREA)
Description
また、携帯機にGNSS機能を搭載しておけば、車両側で携帯機が車室内に存在するか否かを判断することができるので、たとえ電波中継器を用いて電波が中継されても、エンジンが不正に始動されてしまう行為(以下、不正始動行為)を防止することも可能と考えられる。
また、携帯機から受け取った離間距離が、電波の届き得る距離(あるいは、より短い所定距離)よりも大きかった場合は、携帯機を認証しないように、あるいは車両のエンジンが始動されないようにしてやれば、車両のエンジンが不正に始動されてしまう事態を防止することが可能となる。
A.本実施例 :
A-1.本実施例の装置構成 :
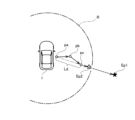
図1は、本実施例の携帯機100が、車両1と通信することによって、車両1の扉を開錠可能な状態に設定する様子を示した説明図である。図示されるように車両1には、車載制御装置10や、開錠装置2などが設けられている。車載制御装置10は、図示しないアンテナに接続されており、車両1のユーザーが携帯する携帯機100と無線で通信することができる。また、開錠装置2は、車両1の図示しない扉毎に設けられており、車載制御装置10の制御の下で、車両1の扉を施錠したり、開錠したりすることができる。
更に、車両1に乗り込んだ後は、車載制御装置10が車室内の携帯機100を認証して、携帯機100が正規の携帯機100であることを確認したら、図示しない始動ボタンが押されたことを検知して、車両1に搭載されている図示しないエンジンを始動することもできる。尚、説明が煩雑となることを回避する観点から、本実施例では、携帯機100を認証してエンジンを始動する点については説明を省略する。
尚、これらの「部」は、車両1の扉が不正に開錠される虞を防止する目的で本実施例の携帯機100が備えている各種の機能を、便宜的に分類したものである。従って、携帯機100の内部が、これらの「部」に物理的に区分されていることを表しているわけではない。これらの「部」は、LSIなどを用いてハードウェア的に実現することもできるし、コンピュータープログラムによってソフトウェア的に実現することもできるし、更には、ハードウェアとソフトウェアとを組み合わせて実現することもできる。
車載制御装置10は車載LFアンテナ10aを用いてLF波の電波を送信しており、携帯機100はLFアンテナ100aを用いて、この電波を受信する。また、携帯機100からは、RFアンテナ100bを用いてRF波の電波を車載制御装置10に向かって送信しており、車載制御装置10は、車載RFアンテナ10bを用いてこの電波を受信する。
施錠検知部103は、車両1の扉が施錠されたことを検知する。すなわち、車両1の車載制御装置10は、扉が開錠装置2によって施錠されたことを検知すると、車載LFアンテナ10aから施錠信号を送信する。そこで、施錠検知部103は、LFアンテナ100aによって受信された電波の中から施錠信号を検出することによって、車両1の扉が施錠されたことを検知する。そして、施錠検知部103は、扉が施錠されたことを検知すると、その旨を施錠位置記憶部102に出力する。
このように、携帯機100に測位部101を搭載すると共に、車両1の扉が施錠された施錠位置を記憶しておき、車両1からの問合信号の受信位置と、施錠位置との離間距離を求めてやれば、中継器を用いた不正な方法で車両1の扉が開錠される事態を防止することができる。
そこで、本実施例の携帯機100は、図2に示すように、加速度検出部108と移動距離推定部109とを備えている。
移動距離推定部109は、加速度検出部108で検出した加速度に基づいて、携帯機100の移動距離を推定する。例えば、携帯機100の加速度の変化に基づいて、携帯機100を携帯するユーザーの歩行を検出して、検出した歩数を、予め設定しておいた歩幅で移動したものと仮定することによって、移動距離を推定することができる。あるいは、加速度を積分することによって移動速度を算出し、移動速度を積分することによって移動距離を算出しても良い。また、移動距離推定部109は、測位部101で測位結果が得られると、それまでに推定していた移動距離を初期化する。従って、移動距離推定部109は、測位部101で測位結果が得られた後の携帯機100の移動距離を推定していることになる。
図3および図4は、本実施例の携帯機100が車両1との間で通信するために実施する通信制御処理のフローチャートである。
図3に示されるように通信制御処理では、先ず初めに、測位衛星からの測位信号を受信したか否かを判断する(S100)。測位衛星は所定の時間間隔で測位信号を送信しているので、携帯機100側での受信環境が良好であれば、所定の時間が経過する度に測位信号を受信することができる。
そして、車両1からの問合信号を受信したら(S107:yes)、問合信号を受信した時刻(以下、受信時刻)を記憶する(S108)。その後、S101で記憶しておいた位置情報と、その位置情報を測位した測位時刻とを読み出して(S109)、読み出した位置情報が示す位置を、問合信号の受信位置として設定した後(S110)、受信位置と施錠位置との離間距離を算出する(図4のS111)。
しかし、携帯機100は、受信環境によっては測位信号を受信できなくなる。そして、このような場合は、S110で設定した受信位置が正しい受信位置であるとは限らない。このため、S111で算出した離間距離と、車両1からの電波が届く距離とを比較しても、正しく判断することは困難となる。
ここで、本実施例の許容時間は、測位衛星が測位信号を送信する時間間隔に設定されている。従って、測位衛星から測位信号が送信される度に、携帯機100が測位信号を受信できていれば、測位信号に基づいて現在位置を測位した時の測位時刻と受信時刻との時間差は、許容時間よりも大きくならない筈である。逆に、時間差が許容時間よりも大きい場合は、少なくとも最後に送信されてきた測位信号を受信できなかったものと考えられる。そして、この場合は、S109で読み出した位置情報は、問合信号を受信した受信位置を表していない可能性がある。
尚、本実施例では、測位衛星が測位信号を送信する時間間隔は比較的長い間隔に設定されているため、測位衛星から測位信号が送信される度に、携帯機100が現在位置を測位しようとするものとして説明した。しかし、測位衛星が比較的短い時間間隔で測位信号を送信する場合は、携帯機100が高い頻度で測位することによる電池の消耗を回避するために、携帯機100が測位信号を受信する時間間隔(以下、受信間隔)が設定されている場合がある。このような場合には、S133の判断で用いられる許容時間は、携帯機100の受信間隔に設定される。
そこで、この場合(S113:no)は、後述する移動距離推定処理で推定していた携帯機100の移動距離の推定値を取得する(S114)。詳細には後述するが、移動距離推定処理では、測位信号を受信して現在位置を測位する度に、その時点からの移動距離を推定している。従って、測位信号を受信できなかった場合は(S113:no)、移動距離推定処理では、最後に測位信号を受信してからの移動距離を推定していることになる。
もちろん、測位信号が受信できなかった場合に、最後に測位信号を受信した位置からの移動距離は推定した値なので、十分な精度を有しているわけではない。従って、携帯機100が実際には車両1からの電波を受信可能な位置に存在するにも拘わらず、電波を受信できない位置に存在すると判断して、問合信号に対して応答信号を返信しない場合も起こり得る。しかし、そのような場合でも、受信環境が改善されて測位信号が受信できれば(図3のS100:yes)、現在位置を測位することができるので(S101)、施錠位置と問合信号の受信位置との離間距離を算出して(S110)、携帯機100が車両1からの電波を受信可能な位置に存在するか否かを、正しく判断することが可能となる(図4のS117)。
図5は、本実施例の携帯機100が測位信号を受信してからの移動距離を推定する移動距離推定処理のフローチャートである。この処理は、図3および図4を用いて前述した通信制御処理に並行して実行される処理である。
図5に示されるように移動距離推定処理では、先ず初めに、施錠信号を受信したか否かを判断する(S200)。図3を用いて前述したように、通信制御処理では、車両1からの施錠信号を受信すると(図3のS103:yes)、その旨を移動距離推定処理に対して出力している(S104)。従って、携帯機100が車両1からの施錠信号を受信すると、移動距離推定処理は直ちにそのことを検知することができる。
続いて、携帯機100に搭載されている図示しない加速度センサーを用いて、携帯機100にかかる加速度を検出する(S202)。本実施例の携帯機100は、いわゆる3軸の加速度センサーを搭載しており、3軸方向の加速度を検出することができる。
そして、加速度の変化量が所定値以上であった場合は(S203:yes)、携帯機100を携帯したユーザーの歩行を検知したものと判断して、移動距離の推定値に、予め設定しておいたユーザーの歩幅を加算する(S204)。
これに対して、加速度の変化量が所定値以下であった場合は(S203:no)、移動距離の推定値に歩幅を加算することはない。
このようにして、測位結果が得られない間は(S205:no)、ユーザーが歩く度に(S203:yes)、歩幅に相当する距離が移動距離の推定値に加算されていく(S204)。
このため、移動距離推定処理では、図3および図4に示した通信制御処理で、最後に測位信号を受信して測位結果が得られる度に、その時点からの携帯機100の移動距離が推定されていることになる。そして、図3および図4に示した通信制御処理のS114では、このような移動距離の推定値を取得している。尚、ここでは、ユーザーが一歩、踏み出す度に、歩幅を加算することによって移動距離を求めるものとして説明したが、歩数を計数しておき、通信制御処理から移動距離を要求された時点での歩数に歩幅を乗算することによって、移動距離を算出するようにしても良い。
上述した本実施例には、複数の変形例が存在する。以下ではこれらの変形例について、本実施例との相違点を中心として簡単に説明する。
上述した本実施例の携帯機100では、測位信号が最後に受信できた位置から、携帯機100が車両1から真っ直ぐに遠ざかる方向に移動したものと仮定して、問合信号に対して返信するか否かを判断した。しかし、携帯機100が車両1から真っ直ぐに遠ざかる方向に移動するとは限らない。そこで、携帯機100の移動方向を検出することによって、車両1からの電波が届く領域R内に携帯機100が存在するか否かを、より精度良く判断しても良い。
ここで、移動方向検出部151は、ジャイロセンサーおよび地磁気センサーと、これらセンサーに出力を生じさせ、あるいは生じた出力を検出するための検出回路とによって実現されており、携帯機150の移動方向を検出する。尚、簡易的には、ジャイロセンサーまたは地磁気センサーの一方と、そのセンサーに出力を生じさせ、あるいは生じた出力を検出するための検出回路とによって移動方向検出部151を実現することもできる。
移動位置推定部152は、移動距離推定部109から移動距離の推定値を受け取り、移動方向検出部151からは移動方向を受け取ることによって、携帯機150がどの方向に、どれだけ移動したかを推定する。また、移動位置推定部152は、測位部101で測位結果が得られると、それまでに推定して得られた結果を初期化する。従って、移動位置推定部152は、測位部101で最後に測位された位置を基準とした携帯機150の移動位置を推定していることになる。
もっとも、受信環境によっては測位信号が受信できない場合がある。そこで、第1変形例の携帯機150では、測位信号が受信できない状況で車両1からの問合信号を受信した場合は、測位部101から取得した位置情報(すなわち、最後に測位したときの位置情報)と、移動位置推定部152から取得した移動位置の推定値(すなわち、最後に測位した位置を基準とした携帯機150の推定位置)とを取得して、これらの情報に基づいて、問合信号に対して返信して良いか否かを判断する。
続いて、車両1からの施錠信号を受信したか否かを判断する(S103に相当)。そして、受信していた場合は、施錠信号を受信した旨を、後述する移動位置推定処理に対して出力した後(S104に相当)、現在位置の測位結果を施錠位置として記憶する(S106に相当)。
以上のように、第1変形例の通信制御処理の前半部分は、図3に示した本実施例の通信制御処理と同様である。
図9に示されるように、第1変形例の通信制御処理の後半部分では、測位時刻と受信時刻との時間差を算出する(S160)。ここで、受信時刻は、第1変形例の通信制御処理の前半部分(図3のS108に相当する処理)で記憶されている。また、測位時刻は、第1変形例の通信制御処理の前半部分(図3のS109に相当する処理)で読み出されている。
これに対して、時間差が許容時間よりも大きかった場合は(S161:no)、少なくとも、問合信号を受信する前の最も近いタイミングで送信されてきた測位信号については受信できなかったものと考えられる。そして、このような場合は、受信位置が、車両1からの問合信号を受信した位置を代表しているとは限らない。
その結果、離間距離が閾値距離Lthよりも小さかった場合は(S166:yes)、携帯機150が車両1からの電波を受信可能な領域R内に存在すると考えられるので、問合信号に対する応答信号を返信する(S167)。
こうすれば、不正な方法で転送されてきた問合信号に対しては、応答信号が返信されることはないので、中継器を用いて不正な方法で車両1の扉が開錠される事態を回避することができる。
これに対して、施錠信号を受信したと判断した場合は(S250:yes)、今度は、測位結果が得られたか否かを判断する(S251)。第1変形例の通信制御処理でも、測位信号を受信して現在位置を測位すると(図3のS101に相当)、測位結果が得られた旨を移動位置推定処理に対して出力している(S102に相当)。従って、移動位置推定処理では、測位結果が得られたことを、直ちに検知することができる。
続いて、図5を用いて前述した移動距離推定処理と同様にして、加速度センサーを用いて、携帯機150にかかる加速度を検出し(S253)、加速度の変化量が所定値以上か否かを判断する(S254)。
こうして、移動方向が得られたら、移動方向と、予め設定しておいた歩幅とを用いて移動ベクトルを決定する(S256)。そして、携帯機150の移動位置を、移動ベクトルを用いて変更する(S257)。ここでは、移動位置がS252で初期化されているから、この位置を原点として移動ベクトルによって示される位置が新たな移動位置となる。
その結果、新たな測位結果が得られていない場合は(S258:no)、S253に戻って、再び加速度を検出する。そして、加速度の変化量が所定値以上であった場合には(S254:yes)、移動方向を検出して(S255)、移動ベクトルを求めた後(S256)、移動ベクトルに従って、携帯機150の移動位置を変更する(S257)。その後、再び、新たな測位結果が得られたか否かを判断する(S258)。このようにして、新たな測位結果が得られるまでの間は(S258:no)、ユーザーが歩く度に(S254:yes)、移動ベクトルを求めて(S255、S256)、携帯機150の移動位置を変更していく(S257)。
このため、移動位置推定処理では、前述した通信制御処理で最後に測位信号を受信して測位結果が得られた位置を基準として、その位置から携帯機150が移動した位置を推定していることになる。
このため、第1変形例の携帯機150も前述した本実施例の携帯機100と同様に、車両1からの問合信号の受信時に、測位衛星からの測位信号を受信できていなかった場合でも、その問合信号に対して返信して良いかを適切に判断することが可能となる。この点について、図11を用いて補足して説明する。
上述した本実施例の携帯機100あるいは第1変形例の携帯機150では、測位信号に基づいて現在位置を測位する機能が内蔵されているものとして説明した。しかし、今日では、いわゆるスマートフォンなどの携帯情報端末が携帯されることが一般的になっており、携帯情報端末には、測位信号に基づいて現在位置を測位する機能や、予め登録された所定の機器と無線通信する機能が内蔵されていることが通常である。そこで、車両1のユーザーが、携帯機100あるいは携帯機150と共に、携帯情報端末も携帯していることを前提として、携帯機100あるいは携帯機150が現在位置を測位するのではなく、携帯情報端末が測位した結果を、携帯情報端末と通信することによって取得するようにしても良い。尚、このような形態は、車両1のユーザーによって携帯されて、車両1と通信することによって扉を開錠させる機能を有する電子キーと、そのユーザーが携帯する携帯情報端末とが、1つの携帯機に対応するものとして把握することができる。以下では、このような第2変形例について説明する。
携帯情報端末160bは、いわゆるスマートフォンであり、測位衛星からの測位信号を受信して現在位置を測位する測位部161や、予め登録された外部の機器との間で無線通信する通信部162などを備えている。
電子キー160aの通信部163は、携帯情報端末160bの通信部162と無線で通信することによって、携帯情報端末160bの測位部161が測位信号に基づいて測位した位置情報と、測位時刻とを取得することができる。
すなわち、施錠位置記憶部102は、車両1の扉が施錠された旨の情報を受け取ると、通信部163から取得した位置情報と測位時刻とをメモリーに記憶する。また、返信判断部105は、問合信号を受け取ると、通信部163によって取得された現在位置(以下、受信位置)および測位時刻を取得して、問合信号に対して応答信号を返信するか否かを判断する。更に、移動距離推定部109は、通信部163によって新たな測位結果が取得される度に、それまでに推定していた移動距離を初期化する。
上述した本実施例あるいは各種の変形例では、ユーザーの携帯する携帯機が、問合信号に対して返信して良いか否かを判断することによって、車両1の扉が不正な方法で開錠されてしまう事態を防止するものとして説明した。しかし、携帯機が問合信号を受け取ると、応答信号と共に離間距離を返信することとしてもよい。
こうすれば、車両側では、携帯機を認証するか否か、あるいは車両1の扉を開錠可能とするか否かを、携帯機から受け取った離間距離に基づいて判断することができるので、車両1の扉が不正な方法で開錠されてしまう事態を防止することが可能となる。以下では、このような第3変形例の携帯機170について説明する。
すなわち、前述した本実施例の携帯機100では、車両1からの問合信号を受け取ると、その問合信号に対して返信して良いか否かを、返信判断部105が判断して、返信して良いと判断された場合に、応答信号返信部106が応答信号を返信していた。これに対して、第3変形例の携帯機170では、車両1からの問合信号を受け取ると、その問合信号に対して返信して良いか否かを判断することなく、応答信号返信部171が応答信号を返信する。そして、第3変形例の応答信号返信部171は、応答信号を返信するに際して、離間距離を取得して、応答信号と共に返信する。離間距離は、図2に示した本実施例の返信判断部105と同様にして取得することができる。
上述した本実施例あるいは各種の変形例では、車両1の扉が施錠された時の携帯機の存在位置(すなわち、施錠位置)は、携帯機側に記憶されているものとして説明した。しかし、車両側で施錠位置を記憶しておいてもよい。そして、問合信号に対する応答信号を受け取る際には、携帯機が問合信号を受け取った時の受信位置も受け取って、施錠位置と受信位置との離間距離を算出することによって、携帯機を認証するか否か、あるいは車両1の扉を開錠可能とするか否かを判断しても良い。以下では、このような第4変形例の携帯機180について説明する。
10…車載制御装置、 100…携帯機、 101…測位部、
102…施錠位置記憶部、 103…施錠検知部、 104…問合信号受信部、
105…返信判断部、 106…応答信号返信部、 107…認証情報記憶部、
108…加速度検出部、 109…移動距離推定部、 150…携帯機、
151…移動方向検出部、 152…移動位置推定部、 160…携帯機、
161…測位部、 162…通信部、 163…通信部、
170…携帯機、 171…応答信号返信部。
Claims (6)
- 車両(1)の使用者によって携帯され、前記車両との間で無線通信することによって、前記車両の扉の開錠、あるいは前記車両のエンジンの始動の少なくとも一方を実行させる機能を備えた携帯機(100、150、160)であって、
所定の時間間隔で送信されてくる測位信号を受信して現在位置を測位する測位部(101、161)と、
前記携帯機に加わる加速度を検出する加速度検出部(108)と、
前記測位信号を受信すると、前記測位信号による前記測位の結果が得られた時点からの前記携帯機の移動距離を、前記携帯機の移動方向を考慮することなく、前記加速度に基づいて推定する移動距離推定部(109)と、
前記車両の扉が施錠されたことを検知すると、前記施錠が検知された時点で得られていた前記測位の結果を取得して、得られた前記測位の結果を施錠位置として記憶する施錠位置記憶部(102)と、
前記車両からの問合信号を受信すると、前記問合信号を受信した時点で得られていた前記測位の結果である受信位置と、前記施錠位置との間の離間距離に基づいて、前記問合信号に対して返信するか否かを判断する返信判断部(105)と、
前記返信すると判断された場合には、前記問合信号に対する応答信号を返信する応答信号返信部(106)と
を備え、
前記返信判断部は、
前記問合信号に対して返信するか否かの判断に先立って、前記受信位置を前記問合信号の受信時の前記携帯機の位置として採用できるか否かを判断し、採用できないと判断した場合は、採用できないと判断した前記受信位置と、前記問合信号を受信した時点で前記移動距離推定部によって推定されていた前記移動距離とに基づいて、前記携帯機の移動方向を考慮することなく、前記離間距離を推定し、
推定した前記離間距離に基づいて、前記返信するか否かを判断する
ことを特徴とする携帯機。 - 請求項1に記載の携帯機であって、
前記移動距離推定部は、前記加速度に基づいて前記使用者の歩行を検出することによって、前記携帯機の移動距離を推定する
ことを特徴とする携帯機。 - 請求項2に記載の携帯機であって、
前記移動距離推定部は、前記使用者の歩数と、予め設定されている前記使用者の歩幅とに基づいて、前記携帯機の移動距離を推定する
ことを特徴とする携帯機。 - 車両(1)に搭載された車載制御装置と、前記車両の使用者によって携帯された携帯機(170)とを備え、前記車載制御装置と前記携帯機との間で無線通信することによって前記携帯機を認証した後、前記車両の扉の開錠、あるいは前記車両のエンジンの始動の少なくとも一方を実行する車両用システムであって、
前記携帯機は、
所定の時間間隔で送信されてくる測位信号を受信して現在位置を測位する測位部(101)と、
前記携帯機に加わる加速度を検出する加速度検出部(108)と、
前記測位信号を受信すると、前記測位信号による前記測位の結果が得られた時点からの前記携帯機の移動距離を、前記携帯機の移動方向を考慮することなく、前記加速度に基づいて推定する移動距離推定部(109)と、
前記車両の扉が施錠されたことを検知すると、前記施錠が検知された時点で得られていた前記測位の結果を取得して、得られた前記測位の結果を施錠位置として記憶する施錠位置記憶部(102)と、
前記車両からの問合信号を受信すると、前記問合信号を受信した時点で得られていた前記測位の結果である受信位置と、前記施錠位置との間の離間距離を算出して、前記問合信号に対する応答信号と共に、前記離間距離を返信する応答信号返信部(171)と
を備えており、
前記車載制御装置は、前記携帯機から前記応答信号と共に返信されてきた前記離間距離に基づいて、前記携帯機を認証するか否か、または前記車両の扉を開錠するか否か、あるいは前記車両のエンジンを始動するか否かの少なくとも何れかを判断しており、
前記応答信号返信部は、
前記問合信号に対して前記応答信号と共に前記離間距離を返信するに先立って、前記受信位置を前記問合信号の受信時の前記携帯機の位置として採用できるか否かを判断し、採用できないと判断した場合は、採用できないと判断した前記受信位置と、前記問合信号を受信した時点で前記移動距離推定部によって推定されていた前記移動距離とに基づいて、前記携帯機の移動方向を考慮することなく前記離間距離を推定し、
推定した前記離間距離と共に、前記応答信号を返信する
ことを特徴とする車両用システム。 - 車両(1)に搭載された車載制御装置と、前記車両の使用者によって携帯された携帯機(180)とを備え、前記車載制御装置と前記携帯機との間で無線通信することによって前記携帯機を認証した後、前記車両の扉の開錠、あるいは前記車両のエンジンの始動の少なくとも一方を実行する車両用システムであって、
前記携帯機は、
所定の時間間隔で送信されてくる測位信号を受信して現在位置を測位する測位部(101)と、
前記携帯機に加わる加速度を検出する加速度検出部(108)と、
前記測位信号を受信すると、前記測位信号による前記測位の結果が得られた時点からの前記携帯機の移動距離を、前記携帯機の移動方向を考慮することなく、前記加速度に基づいて推定する移動距離推定部(109)と、
前記車両の扉が施錠されたことを検知すると、前記施錠が検知された時点で得られていた前記測位の結果を取得して、施錠位置として前記車両に送信する施錠位置送信部(181)と、
前記車両からの問合信号を受信すると、前記問合信号を受信した時点で得られていた前記測位の結果である受信位置を、前記問合信号に対する応答信号と共に返信する応答信号返信部(171)と
を備えており、
前記車載制御装置は、前記携帯機から送信されてきた前記施錠位置を記憶しておき、前記携帯機から前記応答信号と共に返信されてきた前記受信位置を受け取ると、前記施錠位置と前記受信位置とを用いて算出した前記離間距離に基づいて、前記携帯機を認証するか否か、または前記車両の扉を開錠するか否か、あるいは前記車両のエンジンを始動するか否かの少なくとも何れかを判断しており、
前記応答信号返信部は、
前記問合信号に対して前記応答信号と共に前記受信位置を返信するに先立って、前記受信位置を前記問合信号の受信時の前記携帯機の位置として採用できるか否かを判断し、採用できないと判断した場合は、採用できないと判断した前記受信位置と、前記問合信号を受信した時点で前記移動距離推定部によって前記携帯機の移動方向を考慮することなく推定されていた前記移動距離とを、前記応答信号と共に返信しており、
前記車載制御装置は、前記携帯機から前記応答信号と共に前記受信位置と前記移動距離とを受け取った場合には、前記施錠位置と前記受信位置と前記移動距離を用いて推定した前記離間距離に基づいて、前記携帯機を認証するか否か、または前記車両の扉を開錠するか否か、あるいは前記車両のエンジンを始動するか否かの少なくとも何れかを判断する
ことを特徴とする車両用システム。 - 車両の使用者によって携帯され、前記車両との間で無線通信することによって前記車両の扉の開錠、あるいは前記車両のエンジンの始動の少なくとも一方を実行させる機能を備えた携帯機に適用される通信制御方法であって、
所定の時間間隔で送信されてくる測位信号を受信して現在位置を測位する工程(S101)と、
前記携帯機に加わる加速度を検出する工程(S202)と、
前記測位信号を受信すると、前記測位信号による前記測位の結果が得られた時点からの前記携帯機の移動距離を、前記携帯機の移動方向を考慮することなく、前記加速度に基づいて推定する工程(S204)と、
前記車両の扉が施錠されたことを検知すると、前記施錠が検知された時点で得られていた前記測位の結果を取得して、得られた前記測位の結果を施錠位置として記憶する工程(S106)と、
前記車両からの問合信号を受信すると、前記問合信号を受信した時点で得られていた前記測位の結果である受信位置と、前記施錠位置との間の離間距離に基づいて、前記問合信号に対して返信するか否かを判断する工程(S117)と、
前記返信すると判断された場合には、前記問合信号に対する応答信号を返信する工程(S118)と
を備え、
前記問合信号に対して返信するか否かを判断する工程は、
前記判断に先立って、前記受信位置を前記問合信号の受信時の前記携帯機の位置として採用できるか否かを判断し、採用できないと判断した場合は、採用できないと判断した前記受信位置と、前記問合信号を受信した時点で推定されていた前記移動距離とに基づいて、前記携帯機の移動方向を考慮することなく、前記離間距離を推定し、
推定した前記離間距離に基づいて、前記返信するか否かを判断する
ことを特徴とする通信制御方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018168388A JP7262948B2 (ja) | 2018-09-09 | 2018-09-09 | 携帯機、携帯機に適用される通信制御方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018168388A JP7262948B2 (ja) | 2018-09-09 | 2018-09-09 | 携帯機、携帯機に適用される通信制御方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2020041301A JP2020041301A (ja) | 2020-03-19 |
| JP7262948B2 true JP7262948B2 (ja) | 2023-04-24 |
Family
ID=69797703
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018168388A Active JP7262948B2 (ja) | 2018-09-09 | 2018-09-09 | 携帯機、携帯機に適用される通信制御方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP7262948B2 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN115195661B (zh) * | 2021-04-08 | 2025-02-25 | 华为技术有限公司 | 防中继攻击的方法和防中继攻击的装置 |
| JP2022173768A (ja) * | 2021-05-10 | 2022-11-22 | 株式会社東海理化電機製作所 | 認証システム、制御装置、モバイル装置、およびコンピュータプログラム |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001272247A (ja) | 2000-03-28 | 2001-10-05 | Japan Radio Co Ltd | 携帯型複合測位装置及びその現在位置推定方法 |
| JP2011058896A (ja) | 2009-09-09 | 2011-03-24 | Casio Computer Co Ltd | 測位装置、測位方法およびプログラム |
| JP2013002111A (ja) | 2011-06-15 | 2013-01-07 | Tokai Rika Co Ltd | 電子キーシステム |
| JP2013152097A (ja) | 2012-01-24 | 2013-08-08 | Casio Comput Co Ltd | 測位装置、測位方法及びプログラム |
| JP2014150425A (ja) | 2013-02-01 | 2014-08-21 | Denso Corp | 制御システム |
| JP2015218457A (ja) | 2014-05-15 | 2015-12-07 | 株式会社デンソー | 電子キーシステム |
| JP2016014638A (ja) | 2014-07-03 | 2016-01-28 | 株式会社デンソー | 携帯装置及び位置検出システム |
| JP2016155526A (ja) | 2015-02-26 | 2016-09-01 | 株式会社日本自動車部品総合研究所 | 車両盗難防止装置 |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0989584A (ja) * | 1995-09-26 | 1997-04-04 | Honda Motor Co Ltd | 携帯用ナビゲーション装置 |
-
2018
- 2018-09-09 JP JP2018168388A patent/JP7262948B2/ja active Active
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001272247A (ja) | 2000-03-28 | 2001-10-05 | Japan Radio Co Ltd | 携帯型複合測位装置及びその現在位置推定方法 |
| JP2011058896A (ja) | 2009-09-09 | 2011-03-24 | Casio Computer Co Ltd | 測位装置、測位方法およびプログラム |
| JP2013002111A (ja) | 2011-06-15 | 2013-01-07 | Tokai Rika Co Ltd | 電子キーシステム |
| JP2013152097A (ja) | 2012-01-24 | 2013-08-08 | Casio Comput Co Ltd | 測位装置、測位方法及びプログラム |
| JP2014150425A (ja) | 2013-02-01 | 2014-08-21 | Denso Corp | 制御システム |
| JP2015218457A (ja) | 2014-05-15 | 2015-12-07 | 株式会社デンソー | 電子キーシステム |
| JP2016014638A (ja) | 2014-07-03 | 2016-01-28 | 株式会社デンソー | 携帯装置及び位置検出システム |
| JP2016155526A (ja) | 2015-02-26 | 2016-09-01 | 株式会社日本自動車部品総合研究所 | 車両盗難防止装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2020041301A (ja) | 2020-03-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6725302B2 (ja) | キーレスエントリーシステム | |
| EP3663794B1 (en) | In-vehicle wireless communication device and distance information detection method | |
| US10994698B2 (en) | Remote keyless entry system | |
| US9725072B2 (en) | Vehicle control system | |
| US10576933B2 (en) | Vehicle theft protection system | |
| US20120092129A1 (en) | Method to track vehicle key near vehicle for smart entry | |
| US20170327083A1 (en) | Method and system for secure access to a vehicle | |
| US20140045531A1 (en) | Portable-device position determination system, portable-device position determination method, and portable-device position determination apparatus | |
| JP2015085899A (ja) | 車両制御装置 | |
| JP2019056636A (ja) | 携帯機位置推定システム | |
| US12160788B2 (en) | Position estimation method for mobile terminal, position estimation device for mobile terminal and position estimation system for mobile terminal | |
| US11772604B2 (en) | Position estimation method for mobile terminal, position estimation device for mobile terminal and position estimation system for mobile terminal | |
| KR20190127890A (ko) | 차량의 기능을 활성화시키기 위한 방법 | |
| JP6331831B2 (ja) | 車両用通信システム、車載機、携帯機及びコンピュータプログラム | |
| JP2019016840A (ja) | 携帯機、携帯機の制御方法 | |
| JP2020139845A (ja) | 位置検出システム | |
| JP7262948B2 (ja) | 携帯機、携帯機に適用される通信制御方法 | |
| US11679737B2 (en) | Access device for a vehicle | |
| JP7063090B2 (ja) | 車両用解錠制御システム、車両用解錠制御装置、携帯機、車両用解錠制御方法 | |
| JP5717586B2 (ja) | 施解錠制御システム、施解錠制御方法及び電波送受体 | |
| CN114051718A (zh) | 用便携式用户设备通过特高频激活车辆功能的方法和相关功能激活装置 | |
| JP2021087033A (ja) | 車両用システム、車載装置、及び端末位置特定方法 | |
| JP2018188883A (ja) | 車両ドア解錠システム、車両ドア解錠方法 | |
| WO2018047748A1 (ja) | 車載通信システム、車載装置及び携帯機 | |
| JP2025037649A (ja) | 位置判定システム、位置判定方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20210408 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20211220 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20211228 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220204 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20220607 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220801 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20221122 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20230105 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20230328 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20230412 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7262948 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |