JP6414524B2 - 車両制御装置、及び走路信頼度判定方法 - Google Patents
車両制御装置、及び走路信頼度判定方法 Download PDFInfo
- Publication number
- JP6414524B2 JP6414524B2 JP2015168730A JP2015168730A JP6414524B2 JP 6414524 B2 JP6414524 B2 JP 6414524B2 JP 2015168730 A JP2015168730 A JP 2015168730A JP 2015168730 A JP2015168730 A JP 2015168730A JP 6414524 B2 JP6414524 B2 JP 6414524B2
- Authority
- JP
- Japan
- Prior art keywords
- parameter
- value
- reliability
- estimated value
- calculated
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images




Landscapes
- Image Analysis (AREA)
- Steering Control In Accordance With Driving Conditions (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
- Image Processing (AREA)
Description
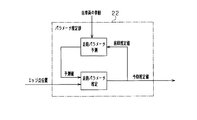
まず、図1を参照して、本実施形態に係る車両制御装置の構成について説明する。本実施形態に係る車両制御装置は、ECU20から構成されている。ECU20には、ECU20へ検知情報を入力するセンサとしてカメラ装置10が接続されている。ECU20には、その他に、図1では省略しているが、車速センサやヨーレートセンサ等の各種の車両センサ類も接続されている。また、ECU20には、ECU20から制御指令を出力する装置として、操舵制御装置40及び警報装置50が接続されている。
図3に、検出した白線の位置を丸印で示し、今回の走路パラメータの推定値を画像平面上の座標に変換して算出した白線の位置を三角印で示す。ここで、走路の推定精度が高い場合、すなわち走路パラメータの推定精度が高い場合、観測値である白線の位置と推定値である白線の位置とは略一致する。一方、走路の推定精度が低い場合、観測値である白線の位置と推定値である白線の位置にはずれが生じる。拡張カルマンフィルタを用いる場合、長期的には、上記偏差がカルマンゲインで調整されて減少することにより、観測値である白線の位置と推定値である白線の位置とは略一致するようになる。しかしながら、短期的に上記偏差が大きくなった場合には、直ぐには上記偏差が収束しないため、直ぐには観測値である白線の位置と推定値である白線の位置とが略一致するようにならない。このような場合に、走路パラメータの推定値に基づいて比較的高い度合の運転支援を実施すると支障が出るおそれがある。
次に、第2実施形態について、第1実施形態と異なる点を説明する。第2実施形態では、信頼度判定部23による走路パラメータの推定値の信頼度の判定が、第1実施形態と異なり、信頼度の判定に走路パラメータの予測値を用いる。
・各走路パラメータは、拡張カルマンフィルタ以外の手法により推定してもよい。例えば、検出した白線の位置及び各走路パラメータの予測値を最小二乗フィッティングして、各走路パラメータの推定値を算出してもよい。各走路パラメータの予測値は、算出した推定値に基づき、自車両の挙動を考慮して算出する。
Claims (7)
- 画像に基づいて自車両が走行する車線を区画する区画線の複数のエッジ点を抽出し、前記区画線の位置を検出する検出部と、
前記車線を特定する走路パラメータを検出された前記区画線の位置に基づいて所定周期で推定する推定部であって、前回の前記走路パラメータの推定値と前記自車両の挙動とに基づいて前記走路パラメータの予測値を予測するとともに、検出された前記区画線の位置と前記走路パラメータの予測値に対応した値との偏差が減少するように、今回の前記走路パラメータの推定値を推定する推定部と、
前記複数のエッジ点のそれぞれについて、検出された前記区画線の位置と前記今回の走路パラメータの推定値又は前記予測値から算出した前記区画線の位置との差分を算出し、算出した前記差分に応じて、前記今回の走路パラメータの推定値の信頼度を判定する判定部と、
を備え、
前記判定部は、前記複数のエッジ点のそれぞれについて算出した前記差分のうちの最大値に応じて、前記信頼度を判定し、
前記判定部は、算出された複数の前記差分のうち、前記自車両から所定距離よりも遠方の前記エッジ点に対する前記差分が所定値よりも大きく、且つ前記所定距離よりも近方の前記エッジ点に対する前記差分が前記所定値よりも小さい場合に、前記走路パラメータのうちの曲率の推定値の信頼度を低下させる車両制御装置。 - 画像に基づいて自車両が走行する車線を区画する区画線の複数のエッジ点を抽出し、前記区画線の位置を検出する検出部と、
前記車線を特定する走路パラメータを検出された前記区画線の位置に基づいて所定周期で推定する推定部であって、前回の前記走路パラメータの推定値と前記自車両の挙動とに基づいて前記走路パラメータの予測値を予測するとともに、検出された前記区画線の位置と前記走路パラメータの予測値に対応した値との偏差が減少するように、今回の前記走路パラメータの推定値を推定する推定部と、
前記複数のエッジ点のそれぞれについて、検出された前記区画線の位置と前記今回の走路パラメータの推定値又は前記予測値から算出した前記区画線の位置との差分を算出し、算出した前記差分に応じて、前記今回の走路パラメータの推定値の信頼度を判定する判定部と、
を備え、
前記判定部は、前記複数のエッジ点のそれぞれについて算出した前記差分の総和に応じて、前記信頼度を判定し、
前記判定部は、算出された複数の前記差分のうち、前記自車両から所定距離よりも遠方の前記エッジ点に対する前記差分が所定値よりも大きく、且つ前記所定距離よりも近方の前記エッジ点に対する前記差分が前記所定値よりも小さい場合に、前記走路パラメータのうちの曲率の推定値の信頼度を低下させる車両制御装置。 - 前記今回の走路パラメータの推定値に基づいて、前記自車両の運転支援を実施する支援処理部、を備え、
前記支援処理部は、前記信頼度に応じて前記運転支援の度合を変化させる請求項1又は2に記載の車両制御装置。 - 前記走路パラメータは複数のパラメータを含み、
前記判定部は、算出された複数の前記差分のうち、前記自車両から所定距離よりも遠方の前記エッジ点に対する前記差分が所定値よりも大きく、且つ前記所定距離よりも近方の前記エッジ点に対する前記差分が前記所定値よりも小さい場合に、前記走路パラメータのうちの曲率の信頼度を低下させ、
前記支援処理部は、前記走路パラメータのそれぞれと、前記走路パラメータのそれぞれに対する係数とに基づいて、前記自車両の操舵制御量を算出するものであり、前記曲率の信頼度が低いほど、前記曲率に乗算する係数を小さくする請求項3に記載の車両制御装置。 - 画像に基づいて自車両が走行する車線を区画する区画線の複数のエッジ点を抽出し、前記区画線の位置を検出する検出部と、
前記車線を特定する走路パラメータを検出された前記区画線の位置に基づいて所定周期で推定する推定部であって、前回の前記走路パラメータの推定値と前記自車両の挙動とに基づいて前記走路パラメータの予測値を予測するとともに、検出された前記区画線の位置と前記走路パラメータの予測値に対応した値との偏差が減少するように、今回の前記走路パラメータの推定値を推定する推定部と、
前記複数のエッジ点のそれぞれについて、検出された前記区画線の位置と前記今回の走路パラメータの推定値又は前記予測値から算出した前記区画線の位置との差分を算出し、算出した前記差分に応じて、前記今回の走路パラメータの推定値の信頼度を判定する判定部と、
前記今回の走路パラメータの推定値に基づいて、前記自車両の運転支援を実施する支援処理部と、を備え、
前記支援処理部は、前記信頼度に応じて前記運転支援の度合を変化させ、
前記走路パラメータは複数のパラメータを含み、
前記判定部は、算出された複数の前記差分のうち、前記自車両から所定距離よりも遠方の前記エッジ点に対する前記差分が所定値よりも大きく、且つ前記所定距離よりも近方の前記エッジ点に対する前記差分が前記所定値よりも小さい場合に、前記走路パラメータのうちの曲率の信頼度を低下させ、
前記支援処理部は、前記走路パラメータのそれぞれと、前記走路パラメータのそれぞれに対する係数とに基づいて、前記自車両の操舵制御量を算出するものであり、前記曲率の信頼度が低いほど、前記曲率に乗算する係数を小さくする車両制御装置。 - 前記判定部は、前記複数のエッジ点のそれぞれについて算出した前記差分のうちの最大値に応じて、前記信頼度を判定する請求項5に記載の車両制御装置。
- 前記判定部は、前記複数のエッジ点のそれぞれについて算出した前記差分の総和に応じて、前記信頼度を判定する請求項5に記載の車両制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015168730A JP6414524B2 (ja) | 2015-08-28 | 2015-08-28 | 車両制御装置、及び走路信頼度判定方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015168730A JP6414524B2 (ja) | 2015-08-28 | 2015-08-28 | 車両制御装置、及び走路信頼度判定方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017043279A JP2017043279A (ja) | 2017-03-02 |
| JP6414524B2 true JP6414524B2 (ja) | 2018-10-31 |
Family
ID=58209615
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015168730A Active JP6414524B2 (ja) | 2015-08-28 | 2015-08-28 | 車両制御装置、及び走路信頼度判定方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6414524B2 (ja) |
Families Citing this family (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6465319B2 (ja) | 2017-03-31 | 2019-02-06 | 株式会社Subaru | 車両の走行制御装置 |
| JP7027738B2 (ja) | 2017-09-06 | 2022-03-02 | 株式会社デンソー | 運転支援装置 |
| JP7053211B2 (ja) * | 2017-10-04 | 2022-04-12 | 株式会社Soken | 運転支援装置 |
| JP6590988B1 (ja) * | 2018-05-01 | 2019-10-16 | 三菱電機株式会社 | 区画線認識装置 |
| CN110717141B (zh) * | 2019-09-22 | 2023-08-04 | 武汉中海庭数据技术有限公司 | 一种车道线优化方法、装置及存储介质 |
| JP7138133B2 (ja) * | 2020-03-16 | 2022-09-15 | 本田技研工業株式会社 | 車両制御装置、車両、車両制御装置の動作方法およびプログラム |
| KR102480023B1 (ko) * | 2021-08-19 | 2022-12-21 | 충북대학교 산학협력단 | 차선 검출 방법 및 이를 이용하는 차량 |
| CN114750759B (zh) * | 2022-04-19 | 2024-04-30 | 合众新能源汽车股份有限公司 | 一种跟车目标确定方法、装置、设备及介质 |
| CN117864172B (zh) * | 2024-03-13 | 2024-05-31 | 吉咖智能机器人有限公司 | 一种自动驾驶控制方法、装置以及设备 |
| JP2026039645A (ja) * | 2024-08-23 | 2026-03-09 | トヨタ自動車株式会社 | 車両制御システム、マップ管理システム、及びパラメータマップ |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3768779B2 (ja) * | 2000-06-02 | 2006-04-19 | 三菱電機株式会社 | 車両の操舵運転支援装置 |
| JP5286214B2 (ja) * | 2009-09-30 | 2013-09-11 | 日立オートモティブシステムズ株式会社 | 車両制御装置 |
| JP5926080B2 (ja) * | 2012-03-19 | 2016-05-25 | 株式会社日本自動車部品総合研究所 | 走行区画線認識装置およびプログラム |
-
2015
- 2015-08-28 JP JP2015168730A patent/JP6414524B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2017043279A (ja) | 2017-03-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6414524B2 (ja) | 車両制御装置、及び走路信頼度判定方法 | |
| US10147003B2 (en) | Lane detection device and method thereof, curve starting point detection device and method thereof, and steering assistance device and method thereof | |
| US10922561B2 (en) | Object recognition device and vehicle travel control system | |
| JP6404722B2 (ja) | 車両の走行制御装置 | |
| US10162361B2 (en) | Vehicle control device | |
| JP6515823B2 (ja) | 車線変更支援装置 | |
| JP7063184B2 (ja) | 物体認識装置 | |
| JP6363519B2 (ja) | 車両制御装置 | |
| JP6600446B2 (ja) | 車両制御装置、及びプログラム | |
| US9988082B2 (en) | Traveling path estimation apparatus | |
| CN107709141B (zh) | 车道脱离避免装置 | |
| JP6413953B2 (ja) | 車線逸脱回避システム | |
| US20180204075A1 (en) | Apparatus and method for recognizing travel lane | |
| JP6965739B2 (ja) | 車両制御装置 | |
| JP6561704B2 (ja) | 運転支援装置、及び運転支援方法 | |
| WO2016117507A1 (ja) | 区画線認識装置 | |
| JP2015179368A (ja) | 走行区画線認識装置及び走行区画線認識プログラム | |
| US20150285614A1 (en) | Travel path estimation apparatus and travel path estimation program | |
| JP6354659B2 (ja) | 走行支援装置 | |
| JP2017045356A (ja) | 車両制御装置及び走路推定方法 | |
| JP7156924B2 (ja) | 車線境界設定装置、車線境界設定方法 | |
| WO2017179469A1 (ja) | 車両制御装置、及び車両制御方法 | |
| JP6105524B2 (ja) | 走行区画線認識装置及び走行区画線認識プログラム | |
| US20180005051A1 (en) | Travel road shape recognition apparatus and travel road shape recognition method | |
| JP6451565B2 (ja) | 運転支援装置、及び運転支援方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20171109 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20180621 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180703 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180727 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20180905 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20180918 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6414524 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |