JP2012095700A - Vacuum cleaner - Google Patents
Vacuum cleaner Download PDFInfo
- Publication number
- JP2012095700A JP2012095700A JP2010243615A JP2010243615A JP2012095700A JP 2012095700 A JP2012095700 A JP 2012095700A JP 2010243615 A JP2010243615 A JP 2010243615A JP 2010243615 A JP2010243615 A JP 2010243615A JP 2012095700 A JP2012095700 A JP 2012095700A
- Authority
- JP
- Japan
- Prior art keywords
- electric blower
- dust
- vacuum cleaner
- input
- electric
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images


















Classifications
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L9/00—Details or accessories of suction cleaners, e.g. mechanical means for controlling the suction or for effecting pulsating action; Storing devices specially adapted to suction cleaners or parts thereof; Carrying-vehicles specially adapted for suction cleaners
- A47L9/28—Installation of the electric equipment, e.g. adaptation or attachment to the suction cleaner; Controlling suction cleaners by electric means
- A47L9/2805—Parameters or conditions being sensed
- A47L9/281—Parameters or conditions being sensed the amount or condition of incoming dirt or dust
- A47L9/2815—Parameters or conditions being sensed the amount or condition of incoming dirt or dust using optical detectors
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L5/00—Structural features of suction cleaners
- A47L5/12—Structural features of suction cleaners with power-driven air-pumps or air-compressors, e.g. driven by motor vehicle engine vacuum
- A47L5/22—Structural features of suction cleaners with power-driven air-pumps or air-compressors, e.g. driven by motor vehicle engine vacuum with rotary fans
- A47L5/36—Suction cleaners with hose between nozzle and casing; Suction cleaners for fixing on staircases; Suction cleaners for carrying on the back
- A47L5/362—Suction cleaners with hose between nozzle and casing; Suction cleaners for fixing on staircases; Suction cleaners for carrying on the back of the horizontal type, e.g. canister or sledge type
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L9/00—Details or accessories of suction cleaners, e.g. mechanical means for controlling the suction or for effecting pulsating action; Storing devices specially adapted to suction cleaners or parts thereof; Carrying-vehicles specially adapted for suction cleaners
- A47L9/24—Hoses or pipes; Hose or pipe couplings
- A47L9/248—Parts, details or accessories of hoses or pipes
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L9/00—Details or accessories of suction cleaners, e.g. mechanical means for controlling the suction or for effecting pulsating action; Storing devices specially adapted to suction cleaners or parts thereof; Carrying-vehicles specially adapted for suction cleaners
- A47L9/28—Installation of the electric equipment, e.g. adaptation or attachment to the suction cleaner; Controlling suction cleaners by electric means
- A47L9/2836—Installation of the electric equipment, e.g. adaptation or attachment to the suction cleaner; Controlling suction cleaners by electric means characterised by the parts which are controlled
- A47L9/2842—Suction motors or blowers
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L9/00—Details or accessories of suction cleaners, e.g. mechanical means for controlling the suction or for effecting pulsating action; Storing devices specially adapted to suction cleaners or parts thereof; Carrying-vehicles specially adapted for suction cleaners
- A47L9/32—Handles
- A47L9/327—Handles for suction cleaners with hose between nozzle and casing
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Electric Vacuum Cleaner (AREA)
Abstract
【課題】掃除状態に適した電力で掃除できる電気掃除機を提供する。
【解決手段】電気掃除機は、電動送風機18を収容した掃除機本体を有する。電気掃除機は、電動送風機18の吸込側に連通する風路を有する。電気掃除機は、風路を通過する塵埃量を検出する光センサ33を有する。電気掃除機は、把持操作用の手元操作部を有する。電気掃除機は、手元操作部の動作を検知する動作検出手段45を有する。電気掃除機は、光センサ33により検出した塵埃量、および、動作検出手段45により検出した動作に基づいて電動送風機18の駆動を制御する制御手段37を有する。
【選択図】図1An electric vacuum cleaner capable of cleaning with electric power suitable for a cleaning state is provided.
The vacuum cleaner has a vacuum cleaner body in which an electric blower 18 is housed. The vacuum cleaner has an air passage communicating with the suction side of the electric blower 18. The vacuum cleaner has an optical sensor 33 that detects the amount of dust passing through the air passage. The vacuum cleaner has a hand operating unit for gripping operation. The electric vacuum cleaner has an operation detection means 45 for detecting the operation of the hand operation unit. The electric vacuum cleaner has a control unit 37 that controls the driving of the electric blower 18 based on the amount of dust detected by the optical sensor 33 and the operation detected by the operation detection unit 45.
[Selection] Figure 1
Description
本発明の実施形態は、電動送風機の吸込側に連通する風路を通過する塵埃量を検出する塵埃量検出手段を備えた電気掃除機に関する。 The embodiment of the present invention relates to a vacuum cleaner provided with dust amount detection means for detecting the amount of dust passing through an air passage communicating with the suction side of an electric blower.
従来、例えばキャニスタ型の電気掃除機は、電動送風機を収容した本体ケースを有する掃除機本体を備えている。この掃除機本体には、電動送風機の吸込側に連通する集塵部が配置されており、この集塵部には、電動送風機の吸込側に連通する風路を内部に区画する風路形成体が接続される。この風路形成体は、基端側から先端側へと、ホース体、延長管および床ブラシが順次連通接続されて構成される。そして、風路の内部には、この風路の内部を通過する塵埃量を検出する塵埃量検出手段としての光センサが配置されており、この光センサにより検出した塵埃量に対応して、電動送風機、あるいは床ブラシに配置された電動機などの入力を制御するように構成されている。 2. Description of the Related Art Conventionally, for example, a canister type vacuum cleaner includes a vacuum cleaner body having a body case that houses an electric blower. The vacuum cleaner main body is provided with a dust collecting portion communicating with the suction side of the electric blower, and the dust collecting portion includes an air passage forming body that divides an air passage communicating with the suction side of the electric blower inside. Is connected. The air path forming body is configured by sequentially connecting a hose body, an extension pipe, and a floor brush from the proximal end side to the distal end side. An optical sensor as a dust amount detecting means for detecting the amount of dust passing through the inside of the air passage is disposed inside the air passage, and electric motors are provided corresponding to the dust amount detected by the optical sensor. It is comprised so that input, such as an electric motor arrange | positioned at an air blower or a floor brush, may be controlled.
電気掃除機においては、塵埃量検出手段により検出した塵埃量だけでなく、例えば使用者がどのように電気掃除機を動作させているかなどの掃除状態によっても、要求される電動送風機の入力が異なるため、掃除状態に適した入力に設定することが望まれる。 In a vacuum cleaner, not only the amount of dust detected by the dust amount detection means but also the required input of the electric blower differs depending on the cleaning state such as how the user operates the vacuum cleaner, for example. Therefore, it is desired to set the input suitable for the cleaning state.
本発明は、このような点に鑑みなされたもので、掃除状態に適した電力で掃除できる電気掃除機を提供することを目的とする。 This invention is made | formed in view of such a point, and it aims at providing the vacuum cleaner which can be cleaned with the electric power suitable for the cleaning state.
実施形態の電気掃除機は、電動送風機を収容した掃除機本体を有する。この電気掃除機は、電動送風機の吸込側に連通する風路を有する。また、この電気掃除機は、風路を通過する塵埃量を検出する塵埃量検出手段を有する。さらに、この電気掃除機は、把持操作される手元操作部を有する。また、この電気掃除機は、手元操作部の動作を検知する動作検出手段を有する。そして、この電気掃除機は、塵埃量検出手段により検出した塵埃量、および、動作検出手段により検出した手元操作部の動作に基づいて電動送風機の駆動を制御する制御手段を有する。 The vacuum cleaner of the embodiment has a vacuum cleaner body that houses an electric blower. The vacuum cleaner has an air passage communicating with the suction side of the electric blower. In addition, this vacuum cleaner has a dust amount detection means for detecting the amount of dust passing through the air passage. Further, the electric vacuum cleaner has a hand operation unit that is gripped. Moreover, this vacuum cleaner has an operation | movement detection means which detects operation | movement of a hand operation part. The vacuum cleaner has control means for controlling the driving of the electric blower based on the amount of dust detected by the dust amount detection means and the operation of the hand operation unit detected by the operation detection means.
以下、第1の実施形態の構成を、図面を参照して説明する。 The configuration of the first embodiment will be described below with reference to the drawings.
図3において、11はいわゆるキャニスタ型の電気掃除機を示し、この電気掃除機11は、掃除機本体12と、この掃除機本体12に着脱可能に接続される管部である風路形成体13とを有している。
In FIG. 3,
掃除機本体12は、被掃除面上を旋回および走行可能な中空状の本体ケース15を備えており、この本体ケース15の内部に、図示しない本体集塵室と電動送風機室とが前後に区画されている。さらに、電動送風機室には、電動送風機18が収容されており、この電動送風機18の吸込側が本体集塵室に連通している。また、本体集塵室内には、フィルタ、集塵袋、あるいは集塵装置(集塵カップ)などの集塵部が配置されている。そして、本体ケース15の前部には、本体集塵室に連通するとともに風路形成体13の基端側が接続される本体吸込口19が開口形成されている。
The vacuum cleaner
また、風路形成体13は、長尺状のホース体21と、このホース体21に着脱可能に接続される延長管22と、この延長管22に着脱可能に接続される吸込口体としての床ブラシ23とを備えており、電動送風機18の吸込側に連通する風路Wを内部に形成している。なお、この風路形成体13は、例えば床ブラシ23を取り外して使用することもできるし、床ブラシ23および延長管22を取り外して使用することもできる。
The air
ホース体21は、長尺筒状のホース本体25と、このホース本体25の一端側である基端側(下流端側)に連通して形成された接続管部26と、ホース本体25の他端側である先端側(上流端側)に連通して形成され例えば風路形成体13の把持操作用の手元操作部27とを一体的に有している。
The
ホース本体25は、可撓性を有する合成樹脂などにより円筒蛇腹状に形成されており、手元操作部27側と掃除機本体12側とを電気的に接続する図示しない配線が内部でかつ風路Wの外部に螺旋状に取り付けられている。
The
接続管部26は、本体吸込口19に挿入接続される部分であり、ホース本体25よりも硬質の合成樹脂などにより円筒状に形成されている。また、この接続管部26には、ホース本体25内に配置された配線と電気的に接続された図示しない端子が配置されており、これら端子が、接続管部26を本体吸込口19に挿入接続することで掃除機本体12側と電気的に接続される。そして、接続管部26が接続される本体吸込口19の内部には、図2に示すように、風路Wを通過する塵埃量を検出するための塵埃量検出手段としての光センサ33が配置されている。
The connecting
ここで、光センサ33は、図1および図2に示すように、例えば赤外光を発光する発光手段としての発光部35と、この発光部35により発光された赤外光を受光する受光手段としての受光部36とを互いに対向する位置に備えており、発光部35からの赤外光の受光部36での受光量によって、風路W中を通過する塵埃量に対応する信号を制御手段37に出力可能となっている。
Here, as shown in FIGS. 1 and 2, the
発光部35は、赤外光などの光を出力するLEDなどの発光素子35aと、この発光素子35aからの発光を風路W内へと導く発光側導光部材としての一方および他方の発光側レンズ35b,35cとを有している。
The
発光素子35aは、例えば掃除機本体12の本体吸込口19の上部に、下方に向けて配置されており、この下方へと赤外光を出力するように構成されている。また、この発光素子35aは、アノード側が可変抵抗器などの抵抗器R1を介して電源部38に電気的に接続され、カソード側が接地されている。
The
また、一方の発光側レンズ35bは、発光素子35aの赤外光の出力側である下方にて本体吸込口19の内面に配置されている。
One light-emitting
また、他方の発光側レンズ35cは、風路形成体13の接続管部26を本体吸込口19に接続した状態で発光素子35a(発光側レンズ35b)の下方に対向する位置に配置されている。この他方の発光側レンズ35cは、接続管部26に径方向に沿って穿設された発光側孔部35d内に、この発光側孔部35dを気密に閉塞するように嵌合しており、一端側が発光素子35a側(発光側レンズ35b側)に臨み、他端側が風路Wの内部に臨んでいる。すなわち、発光側孔部35dから風路W内の空気が風路Wの外部へと流出することはない。
The other light-emitting
同様に、受光部36は、発光部35から出力された赤外光を検出するフォトトランジスタなどの受光素子36aと、発光部35から出力された光を受光素子36aへと導く受光側導光部材としての一方および他方の受光側レンズ36b,36cとを有している。
Similarly, the
受光素子36aは、例えば掃除機本体12の本体吸込口19の下部に、上方すなわち発光素子35a側に向けて配置されており、この発光素子35aから出力された赤外光を受光するように構成されている。また、この受光素子36aは、電源部38に対して抵抗器R1と並列に接続された抵抗器R2とコレクタ側が電気的に接続され、エミッタ側が接地された、いわゆるエミッタ接地回路を構成しており、その出力部である抵抗器R2とコレクタ側との接続点が、例えばOPアンプなどにより構成された増幅部39、および、制御手段37にそれぞれ電気的に接続されている。
The
また、一方の受光側レンズ36bは、受光素子36aに対する赤外光の入力側である上方にて本体吸込口19の内面に配置されている。
One light-receiving
また、他方の受光側レンズ36cは、風路形成体13の接続管部26を本体吸込口19に接続した状態で受光素子36a(受光側レンズ36b)の上方に対向する位置に配置されている。この他方の受光側レンズ36cは、接続管部26に径方向に沿って穿設された受光側孔部36d内に、この受光側孔部36dを気密に閉塞するように嵌合しており、一端側が受光素子36a側(受光側レンズ36b側)に臨み、他端側が風路Wの内部に臨んでいる。すなわち、受光側孔部36dから風路W内の空気が風路Wの外部へと流出することはない。
Further, the other light receiving
また、制御手段37は、電動送風機18の動作を例えば電動送風機制御素子としてのトライアックTr1を介して位相制御するもので、例えば電動送風機18の排気風路内などに配置されている。また、この制御手段37は、例えば図示しない電源コードを介して商用交流電源eから電源が供給される。
The control means 37 controls the phase of the operation of the
また、電源部38は、商用交流電源eに電源コードが電気的に接続されたとき、すなわち電源(電圧)が印加(投入)されたとき、換言すればプラグインされたときに、商用交流電源eからの給電により所定の定電圧、例えば5Vの電圧を生成する定電圧源である。
The
増幅部39は、パルス整形器40を介して制御手段37に電気的に接続されている。
The amplifying
また、手元操作部27は、図3に示すように、ホース本体25よりも硬質の合成樹脂などにより略円筒状に形成されており、上流端側から下流端側へと、使用者に把持される把持部41が突出して形成されている。この把持部41には、電動送風機18などの動作を制御手段37(図1)に設定するための設定手段としての複数の設定ボタン42が配置されている。これら設定ボタン42は、ホース本体25内の配線を介して掃除機本体12内の制御手段37(図1)などと電気的に接続されている。さらに、この把持部41の内部には、手元操作部27の動作を検出するための動作検出手段45が配置されている。この動作検出手段45は、例えば傾斜センサなどの既知のものであり、手元操作部27が動作しているか(静止しているか)どうか、換言すれば使用者が手元操作部27を操作(使用)しているかどうかを検出可能となっている。そして、この動作検出手段45は、図1に示すように、制御手段37に電気的に接続されている。
Further, as shown in FIG. 3, the
また、図3に示す床ブラシ23は、風路Wの一部(上流端)を構成可能なものであり、延長管22の先端側(上流端側)に一端側が連通接続される接続管47と、この接続管47の他端側に、上下方向あるいは周方向などに回動可能に接続された横長のケース体48とを備えており、被掃除面上を走行可能となっている。さらに、ケース体48の床面に対向する下部には、接続管47の他端側と連通する吸込口が形成されている。
Further, the
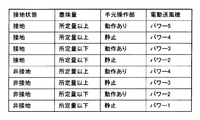
次に、上記第1の実施形態の動作を、図4に示すマトリクスおよび図5に示すフローチャートも参照しながら説明する。 Next, the operation of the first embodiment will be described with reference to the matrix shown in FIG. 4 and the flowchart shown in FIG.
使用者が、集塵部を掃除機本体12内に取り付けた状態で、電源コードを壁面のコンセントなどに接続(プラグイン)すると、制御手段37および電源部38などに対して、商用交流電源eから電源(電圧)が供給(印加)される。
When the user attaches (plugs in) the power cord to a wall outlet or the like with the dust collecting unit mounted in the vacuum
制御手段37は、設定ボタン42の操作入力待ちとなり、使用者が設定ボタン42の操作により設定した動作モードで電動送風機18を駆動、または、駆動している電動送風機18を停止する。以下、電動送風機18を自動モード、すなわち制御手段37により入力を自動制御するモードで駆動させた場合の各部の動作を説明する。
The control means 37 waits for an operation input of the
使用者は、電動送風機18が駆動した後、把持部41を介して床ブラシ23を被掃除面上で前後に走行させて、被掃除面の塵埃を、駆動した電動送風機18の負圧により風路Wを介して空気とともに吸い込んで集塵部に捕集する。
After the
なお、この掃除状態において、制御手段37は、例えば光センサ33から出力される出力信号を増幅部39により増幅しパルス整形器40によりパルス整形して入力される入力信号によって、風路W内を通過する塵埃量を監視している。換言すれば、電気掃除機11は、光センサ33により塵埃量を検出している(ステップ1)。
In this cleaning state, the control means 37, for example, amplifies the output signal output from the
すなわち、風路W内を塵埃が通過すると、発光部35の発光素子35aからの発光を塵埃が遮るため、受光部36の受光素子36aでの受光量が減少することで、風路W内を塵埃が通過していることを光センサ33により検出できる。したがって、風路W内を通過する塵埃量が多いほど、受光部36の受光素子36aでの受光量が減少するので、光センサ33からの出力信号が増幅部39により増幅されパルス整形器40によりパルス整形されて制御手段37に入力される入力信号が相対的に小さくなることで、制御手段37は、風路W内を通過する(掃除している被掃除面の位置での)塵埃量の寡多を、上記入力信号の大小によって判断可能となる。
That is, when dust passes through the air path W, the dust blocks light emission from the
そして、制御手段37は、例えば上記入力信号と予め設定された閾値とを比較することなどにより、光センサ33により検出した塵埃量が予め設定された所定量以上であるかどうかを判断し(ステップ2)、所定量以上でない(所定量未満である)と判断したときには、制御手段37は、動作検出手段45により手元操作部27が動作しているかどうかを判断する(ステップ3)。
Then, the control means 37 determines whether or not the dust amount detected by the
このステップ3において、手元操作部27が動作していない(手元操作部27が静止している)と制御手段37が判断したときには、例えば使用者が手元操作部27を把持しておらず、通常どおりの掃除をしていない状態、例えば電気掃除機11(電動送風機18)を駆動させたまま、風路形成体13を放置している掃除状態などと想定して、制御手段37は、トライアックTr1により設定する電動送風機18の入力の位相角を最も小さい所定の最小値である所定の電動送風機用第1値として、電動送風機18を最低入力である所定の第1電動送風機入力(パワー1)で動作させる(ステップ4)。
In
また、ステップ3において、手元操作部27が動作している(手元操作部27が静止していない)と制御手段37が判断したときには、例えば使用者が通常どおり前後に床ブラシ23を往復動させて掃除をしているものの、被掃除面の塵埃量が少ない掃除状態などと想定して、この制御手段37は、トライアックTr1により設定する電動送風機18の入力の位相角を電動送風機用第1値よりも大きい所定の電動送風機用第2値として、電動送風機18を第1電動送風機入力よりも大きい所定の第2電動送風機入力(パワー2)で動作させる(ステップ5)。
In
一方、ステップ2において、光センサ33により検出した塵埃量が所定量以上であると判断したときには、制御手段37は、動作検出手段45により手元操作部27が動作しているかどうかを判断する(ステップ6)。
On the other hand, when it is determined in
このステップ6において、手元操作部27が動作していない(手元操作部27が静止している)と制御手段37が判断したときには、例えば壁際などに部分的に塵埃が溜まっている場所の掃除状態などと想定して、制御手段37は、トライアックTr1により設定する電動送風機18の入力の位相角を電動送風機用第2値よりも大きい所定の電動送風機用第3値として、電動送風機18を第2電動送風機入力よりも大きい所定の第3電動送風機入力(パワー3)で動作させる(ステップ7)。
In this
また、ステップ6において、手元操作部27が動作している(手元操作部27が静止していない)と制御手段37が判断したときには、例えば被掃除面の塵埃量が多く、かつ、使用者が通常どおり前後に床ブラシ23を往復動させて掃除をしている掃除状態などと想定して、この制御手段37は、トライアックTr1により設定する電動送風機18の入力の位相角を電動送風機用第3値よりも大きい所定の電動送風機用第4値として、電動送風機18を第3入力よりも大きい所定の第4電動送風機入力(パワー4)で動作させる(ステップ8)。
In
すなわち、光センサ33により検出した塵埃量、および、動作検出手段45で検出した手元操作部27の動作状態に基づいて掃除状態を想定し、その想定した掃除状態に対応して、制御手段37が電動送風機18の駆動(入力)を制御することで、光センサ33からの情報と動作検出手段45からの情報との2つの情報に基づいて使用者の掃除状態を精度よく想定でき、掃除状態に適した電力で掃除できる。
That is, a cleaning state is assumed based on the amount of dust detected by the
次に、第2の実施形態を図6ないし図9を参照して説明する。なお、上記第1の実施形態と同様の構成および作用については、同一符号を付してその説明を省略する。 Next, a second embodiment will be described with reference to FIGS. In addition, about the structure and effect | action similar to the said 1st Embodiment, the same code | symbol is attached | subjected and the description is abbreviate | omitted.
この第2の実施形態は、上記第1の実施形態において、床ブラシ23に、回転清掃体としての回転ブラシ51を備えるものである。
In the second embodiment, the
すなわち、床ブラシ23は、図7に示すように、ケース体48の被掃除面に対向する下面に開口形成された横長の吸込口に回転ブラシ51が回転可能に取り付けられている。この回転ブラシ51は、ケース体48内に収容された電動機52に対してベルトなどの伝達手段53を介して連結され、この電動機52により回転駆動される。
That is, as shown in FIG. 7, the
回転ブラシ51は、被掃除面に入り込んだり絡み付いたりした塵埃を回転により掻き取るものである。この回転ブラシ51は任意の構成とすることができるが、例えば毛ブラシ、あるいはブレードなどの清掃部材を備えることが好ましい。
The rotating
電動機52は、図6に示すように、制御手段37により、電動機制御素子としてのトライアックTr2を介して位相制御される。また、この電動機52は、電気掃除機11(電動送風機18)のオンオフと同時に(オンオフに対応して)、オンオフされるものとする。なお、これら制御手段37と電動機52(トライアックTr2)とは、風路形成体13の内部を通る図示しない配線により電気的に接続されている。
As shown in FIG. 6, the phase of the
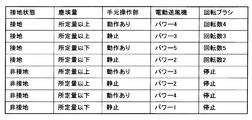
次に、上記第2の実施形態の動作を、図8に示すマトリクスおよび図9に示すフローチャートも参照しながら説明する。 Next, the operation of the second embodiment will be described with reference to the matrix shown in FIG. 8 and the flowchart shown in FIG.
上記第1の実施形態のステップ3において、手元操作部27が動作していない(手元操作部27が静止している)と制御手段37が判断したときには、例えば使用者が手元操作部27を把持しておらず、通常どおりの掃除をしていない状態、例えば電気掃除機11(電動送風機18)を駆動させたまま、風路形成体13を放置している掃除状態などと想定して、制御手段37は、トライアックTr1により設定する電動送風機18の入力の位相角を上記電動送風機用第1値として、電動送風機18を上記第1電動送風機入力(パワー1)で動作させるとともに、トライアックTr2により設定する電動機52の入力の位相角を最も小さい所定の最小値である所定の電動機用第1値として、電動機52を最低入力である所定の第1電動機入力で動作させることにより、回転ブラシ51を最低回転数である所定の第1回転数(回転数1)で回転させる(ステップ11)。
In
また、ステップ3において、手元操作部27が動作している(手元操作部27が静止していない)と制御手段37が判断したときには、例えば使用者が通常どおり前後に床ブラシ23を往復動させて掃除をしているものの、被掃除面の塵埃量が少ない掃除状態などと想定して、この制御手段37は、トライアックTr1により設定する電動送風機18の入力の位相角を上記電動送風機用第2値として、電動送風機18を上記第2電動送風機入力(パワー2)で動作させるとともに、トライアックTr2により設定する電動機52の入力の位相角を電動機用第1値よりも大きい所定の電動機用第2値として、電動機52を第1電動機入力よりも大きい所定の第2電動機入力で動作させることにより、回転ブラシ51を第1回転数よりも大きい所定の第2回転数(回転数2)で回転させる(ステップ12)。
In
さらに、ステップ6において、手元操作部27が動作していない(手元操作部27が静止している)と制御手段37が判断したときには、例えば絨毯の壁際など部分的に多くの塵埃が溜まっている場所の掃除状態などと想定して、制御手段37は、トライアックTr1により設定する電動送風機18の入力の位相角を上記電動送風機用第3値として、電動送風機18を上記第3電動送風機入力(パワー3)で動作させるとともに、トライアックTr2により設定する電動機52の入力の位相角を電動機用第2値よりも大きい所定の電動機用第3値として、電動機52を第2電動機入力よりも大きい所定の第3電動機入力で動作させることにより、回転ブラシ51を第2回転数よりも大きい所定の第3回転数(回転数3)で回転させる(ステップ13)。
Furthermore, when the
そして、ステップ6において、手元操作部27が動作している(手元操作部27が静止していない)と制御手段37が判断したときには、例えば被掃除面の塵埃量が多く、かつ、使用者が通常どおり前後に床ブラシ23を往復動させて掃除をしている掃除状態などと想定して、この制御手段37は、トライアックTr1により設定する電動送風機18の入力の位相角を上記電動送風機用第4値として、電動送風機18を上記第4電動送風機入力(パワー4)で動作させるとともに、トライアックTr2により設定する電動機52の入力の位相角を電動機用第3値よりも大きい所定の電動機用第4値として、電動機52を第3電動機入力よりも大きい所定の第4電動機入力で動作させることにより、回転ブラシ51を第3回転数よりも大きい所定の第4回転数(回転数4)で回転させる(ステップ14)。
In
このように、制御手段37が、光センサ33により検出した塵埃量、および、動作検出手段45により検出した手元操作部27の動作に基づいて掃除状態を想定し、その想定した掃除状態に対応して電動送風機18および電動機52(回転ブラシ51)の駆動をそれぞれ制御することにより、電動送風機18だけでなく、電動機52(回転ブラシ51)をも掃除状態に適した状態で駆動させることができるので、掃除状態に適した電力で掃除でき、省エネルギ化が可能になるとともに、電動機52(回転ブラシ51)により被掃除面の塵埃を掻き取ることができるので、掃除性能をより向上できる。
Thus, the control means 37 assumes a cleaning state based on the amount of dust detected by the
次に、第3の実施形態を図10ないし図13を参照して説明する。なお、上記各実施形態と同様の構成および作用については、同一符号を付してその説明を省略する。 Next, a third embodiment will be described with reference to FIGS. In addition, about the structure and effect | action similar to said each embodiment, the same code | symbol is attached | subjected and the description is abbreviate | omitted.
この第3の実施形態は、上記第1の実施形態において、床ブラシ23に、この床ブラシ23の接地状態を検出する接地検出手段55が配置されているものである。
In the third embodiment, in the first embodiment, the
図11に示すように、接地検出手段55は、ケース体48の被掃除面に対向する下面に形成された開口部56に可動的に取り付けられている。また、この接地検出手段55は、接地部としての車輪57と、この車輪57の接地/非接地によりオンオフが切り換えられる図示しない切換スイッチとを有しており、車輪57が支持部材59に回動自在に軸支され、この支持部材59がケース体48に回動可能に軸支されている。そして、床ブラシ23を被掃除面に接触(接地)させると、車輪57が被掃除面に接触することでこの車輪57が支持部材59とともに回動して開口部56に収納され、この回動した支持部材59が切換スイッチをオンさせることで床ブラシ23の接地が検出され、床ブラシ23を被掃除面に対して離間させる(非接地状態にする)と、支持部材59とともに車輪57が開口部56から突出して、切換スイッチに対して支持部材59が離間され、切換スイッチがオフされることで床ブラシ23の非接地が検出されるように構成されている。
As shown in FIG. 11, the ground detection means 55 is movably attached to an
また、接地検出手段55は、図10に示すように、制御手段37に電気的に接続されており、接地検出手段55の切換スイッチのオンオフを介して、制御手段37が床ブラシ23の接地/非接地を認識できるように構成されている。なお、接地検出手段55と制御手段37とは、風路形成体13の内部を通る図示しない配線により電気的に接続されている。したがって、例えば床ブラシ23を延長管22から取り外している場合、あるいは、延長管22および床ブラシ23を手元操作部27から取り外して他の吸込口体、例えばつる口などを手元操作部27に対して接続している場合には、接地検出手段55と制御手段37との電気的接続が遮断されることにより、制御手段37は床ブラシ23が接地していないと判断するように構成されている。すなわち、接地検出手段55は、床ブラシ23の接地/非接地を検出することにより、床ブラシ23を用いているか、床ブラシ23を取り外して他の吸込口体を用いているかをも間接的に判断する、接続検出手段の機能を有している。このため、以下、制御手段37が接地検出手段55により検出する接地/非接地は、床ブラシ23の接続/非接続も含むものとする。
Further, as shown in FIG. 10, the ground detection means 55 is electrically connected to the control means 37, and the control means 37 is connected to the
次に、上記第3の実施形態の動作を、図12に示すマトリクスおよび図13に示すフローチャートも参照しながら説明する。 Next, the operation of the third embodiment will be described with reference to the matrix shown in FIG. 12 and the flowchart shown in FIG.
まず、ステップ3において、手元操作部27が動作していない(手元操作部27が静止している)と制御手段37が判断したときには、この制御手段37は、接地検出手段55により、床ブラシ23が接地しているかどうかを判断する(ステップ21)。
First, in
そして、このステップ21において、床ブラシ23が接地していないと判断したときには、制御手段37は、例えば被掃除面の塵埃量が少なく、使用者が床ブラシ23(および延長管22)を取り外して例えばつる口などの他の吸込口体を接続し、かつ、使用者が手元操作部27を把持しておらず、通常どおりの掃除をしていない状態、例えば電気掃除機11(電動送風機18)を駆動させたまま、風路形成体13を放置している掃除状態などと想定して、制御手段37は、トライアックTr1により設定する電動送風機18の入力の位相角を上記電動送風機用第1値として、電動送風機18を上記第1電動送風機入力(パワー1)で動作させる(ステップ22)。
In
また、ステップ21において、床ブラシ23が接地していると判断したときには、制御手段37は、例えば被掃除面の塵埃量が少ないものの、例えば床ブラシ23を被掃除面に接地させて壁際など部分的に塵埃が溜まっている場所の掃除状態などと想定して、制御手段37は、トライアックTr1により設定する電動送風機18の入力の位相角を上記電動送風機用第2値として、電動送風機18を上記第2電動送風機入力(パワー2)で動作させる(ステップ23)。
Further, when it is determined in
また、ステップ3において、手元操作部27が動作している(手元操作部27が静止していない)と制御手段37が判断したときには、ステップ21と同様に、制御手段37は、接地検出手段55により、床ブラシ23が接地しているかどうかを判断する(ステップ24)。
In
そして、このステップ24において、床ブラシ23が接地していないと判断したときには、制御手段37は、例えば被掃除面の塵埃量が少ないものの、例えば床ブラシ23(および延長管22)を取り外してつる口などの他の吸込口体を接続して掃除している掃除状態などと想定して、制御手段37は、トライアックTr1により設定する電動送風機18の入力の位相角を上記電動送風機用第2値として、電動送風機18を上記第2電動送風機入力(パワー2)で動作させる(ステップ25)。
In
また、ステップ24において、床ブラシ23が接地していると判断したときには、制御手段37は、例えば被掃除面の塵埃量が少ないものの、床ブラシ23を被掃除面に接地させて掃除している掃除状態などと想定して、制御手段37は、トライアックTr1により設定する電動送風機18の入力の位相角を上記電動送風機用第3値として、電動送風機18を上記第3電動送風機入力(パワー3)で動作させる(ステップ26)。
Further, when it is determined in
一方、ステップ6において、手元操作部27が動作していない(手元操作部27が静止している)と制御手段37が判断したときには、ステップ21,24と同様に、制御手段37は、接地検出手段55により、床ブラシ23が接地しているかどうかを判断する(ステップ27)。
On the other hand, in
そして、このステップ27において、床ブラシ23が接地していないと判断したときには、制御手段37は、例えば家具と壁との隙間などの狭い場所に、例えば床ブラシ23を取り外してつる口などの他の吸込口体を接続し、吸込風量によって溜まっている塵埃を吸い込むために、所定の時間、吸込口体を静止させて掃除する掃除状態などと想定して、制御手段37は、トライアックTr1により設定する電動送風機18の入力の位相角を上記電動送風機用第3値として、電動送風機18を上記第3電動送風機入力(パワー3)で動作させる(ステップ28)。
In
また、ステップ27において、床ブラシ23が接地していると判断したときには、制御手段37は、例えば被掃除面の隅、あるいは壁際などを床ブラシ23により掃除している掃除状態などと想定して、制御手段37は、トライアックTr1により設定する電動送風機18の入力の位相角を上記電動送風機用第4値として、電動送風機18を上記第4電動送風機入力(パワー4)で動作させる(ステップ29)。
Further, when it is determined in
さらに、ステップ6において、手元操作部27が動作している(手元操作部27が静止していない)と制御手段37が判断したときには、ステップ21,24,27と同様に、制御手段37は、接地検出手段55により、床ブラシ23が接地しているかどうかを判断する(ステップ30)。
Further, when the
そして、このステップ30において、床ブラシ23が接地していないと判断したときには、制御手段37は、例えば塵埃量が多い棚の上など広範囲の被掃除面に対して、例えば床ブラシ23(および延長管22)を取り外して家具ブラシなどの他の吸込口体を用いて掃除している掃除状態などと想定して、制御手段37は、トライアックTr1により設定する電動送風機18の入力の位相角を上記電動送風機用第4値として、電動送風機18を上記第4電動送風機入力(パワー4)で動作させる(ステップ31)。
When it is determined in
また、ステップ30において、床ブラシ23が接地していると判断したときには、制御手段37は、例えば被掃除面の塵埃量が多く、かつ、使用者が床ブラシ23を接地させて通常どおり前後に床ブラシ23を往復動させて掃除をしている掃除状態などと想定して、制御手段37は、トライアックTr1により設定する電動送風機18の入力の位相角を電動送風機用第4値よりも大きい最大値である所定の電動送風機用第5値として、電動送風機18を第4電動送風機入力よりも大きい最大入力である所定の第5電動送風機入力(パワー5)で動作させる(ステップ32)。
Further, when it is determined in
このように、床ブラシ23、あるいはつる口などの吸込口体の接地状態(接続状態)を接地検出手段55により検出し、制御手段37が、光センサ33により検出した塵埃量、動作検出手段45により検出した手元操作部27の動作、および、接地検出手段55により検出した吸込口体の接地状態(接続状態)に基づいて掃除状態を想定し、その想定した掃除状態に対応して電動送風機18の駆動を制御することで、使用者の掃除状態を、光センサ33からの情報と動作検出手段45からの情報と接地検出手段55からの情報との3つの情報に基づいて、より精度よく想定することが可能になり、掃除状態により適した電力で掃除でき、一層の省エネルギ化が可能になる。すなわち、例えば床ブラシ23が接地しているとき(接続されているとき)には、床ブラシ23を接地していないとき(接続していないとき)よりも電動送風機18の入力(パワー(吸込力))を増加させているので、例えばパワーが必要となる床ブラシ23を用いて床面などの被掃除面を掃除するときと、床ブラシ23と比較して開口面積が狭く電動送風機18のパワーが小さくてよい、つる口などの吸込口体を用いた掃除のときとを制御手段37が識別でき、電動送風機18の入力をより適正に設定できる。
In this way, the grounding state (connection state) of the suction inlet body such as the
なお、上記第1の実施形態および第3の実施形態において、床ブラシ23には、上記第2実施形態の回転ブラシ51および電動機52を備える構成としてもよいが、電動機52(回転ブラシ51)は、電動送風機18と独立して制御するものとする。
In the first embodiment and the third embodiment, the
次に、第4の実施形態を図14ないし図16を参照して説明する。なお、上記各実施形態と同様の構成および作用については、同一符号を付してその説明を省略する。 Next, a fourth embodiment will be described with reference to FIGS. In addition, about the structure and effect | action similar to said each embodiment, the same code | symbol is attached | subjected and the description is abbreviate | omitted.
この第4の実施形態は、図14に示すように、上記第2の実施形態において、上記第3の実施形態の接地検出手段55を備えるものである。 As shown in FIG. 14, the fourth embodiment includes the ground detection means 55 of the third embodiment in the second embodiment.
そして、図15に示すマトリクスおよび図16に示すフローチャートを参照しながら説明すると、ステップ21において、床ブラシ23が接地していないと判断したときには、例えば被掃除面の塵埃量が少なく、かつ、使用者が床ブラシ23を被掃除面に対して浮かせたまま風路形成体13を放置している掃除状態などと想定して、制御手段37は、トライアックTr1により設定する電動送風機18の入力の位相角を上記電動送風機用第1値として、電動送風機18を上記第1電動送風機入力(パワー1)で動作させるとともに、トライアックTr2により設定する電動機52の入力の位相角を0として、電動機52すなわち回転ブラシ51を停止させる(ステップ41)。
Then, with reference to the matrix shown in FIG. 15 and the flowchart shown in FIG. 16, when it is determined in
また、ステップ21において、床ブラシ23が接地していると判断したときには、制御手段37は、例えば床ブラシ23を被掃除面に接地させて塵埃量の少ない壁際などに押し付けて静止した掃除状態などと想定して、制御手段37は、トライアックTr1により設定する電動送風機18の入力の位相角を上記電動送風機用第2値として、電動送風機18を上記第2電動送風機入力(パワー2)で動作させるとともに、トライアックTr2により設定する電動機52の入力の位相角を上記電動機用第2値として、電動機52を上記第2電動機入力で動作させることにより、回転ブラシ51を上記第2回転数(回転数2)で回転させる(ステップ42)。
Further, when it is determined in
同様に、ステップ24において、床ブラシ23が接地していないと判断したときには、制御手段37は、例えば被掃除面の塵埃量が少ないものの、例えば床ブラシ23(および延長管22)を取り外してつる口などの他の吸込口体を用いて掃除している掃除状態などと想定して、制御手段37は、トライアックTr1により設定する電動送風機18の入力の位相角を上記電動送風機用第2値として、電動送風機18を上記第2電動送風機入力(パワー2)で動作させるとともに、トライアックTr2により設定する電動機52の入力の位相角を0として、電動機52すなわち回転ブラシ51を停止させる(ステップ43)。
Similarly, when it is determined in
また、ステップ24において、床ブラシ23が接地していると判断したときには、制御手段37は、例えば被掃除面の塵埃量が少ないものの、床ブラシ23を被掃除面に接地させて掃除している掃除状態などと想定して、制御手段37は、トライアックTr1により設定する電動送風機18の入力の位相角を上記電動送風機用第3値として、電動送風機18を上記第3電動送風機入力(パワー3)で動作させるとともに、トライアックTr2により設定する電動機52の入力の位相角を上記電動機用第3値として、電動機52を上記第3電動機入力で動作させることにより、回転ブラシ51を上記第3回転数(回転数3)で回転させる(ステップ44)。
Further, when it is determined in
さらに、ステップ27において、床ブラシ23が接地していないと判断したときには、制御手段37は、例えば家具と壁との隙間などの狭い場所に、例えば床ブラシ23を取り外してつる口などの他の吸込口体を接続し、吸込風量によって溜まっている塵埃を吸い込むために、所定の時間、吸込口体を静止させて掃除する掃除状態などと想定して、制御手段37は、トライアックTr1により設定する電動送風機18の入力の位相角を上記電動送風機用第3値として、電動送風機18を上記第3電動送風機入力(パワー3)で動作させるとともに、トライアックTr2により設定する電動機52の入力の位相角を0として、電動機52すなわち回転ブラシ51を停止させる(ステップ45)。
Further, when it is determined in
また、ステップ27において、床ブラシ23が接地していると判断したときには、制御手段37は、例えば被掃除面の隅、あるいは壁際などを床ブラシ23により掃除しようとしている掃除状態などと想定して、制御手段37は、トライアックTr1により設定する電動送風機18の入力の位相角を上記電動送風機用第4値として、電動送風機18を上記第4電動送風機入力(パワー4)で動作させるとともに、トライアックTr2により設定する電動機52の入力の位相角を上記電動機用第4値として、電動機52を上記第4電動機入力で動作させることにより、回転ブラシ51を上記第4回転数(回転数4)で回転させる(ステップ46)。
Further, when it is determined in
そして、ステップ30において、床ブラシ23が接地していないと判断したときには、制御手段37は、例えば塵埃量が多い棚の上など広範囲の被掃除面に対して、例えば床ブラシ23(および延長管22)を取り外して家具ブラシなどの他の吸込口体を用いて掃除している掃除状態などと想定して、制御手段37は、トライアックTr1により設定する電動送風機18の入力の位相角を上記電動送風機用第4値として、電動送風機18を上記第4電動送風機入力(パワー4)で動作させるとともに、トライアックTr2により設定する電動機52の入力の位相角を0として、電動機52すなわち回転ブラシ51を停止させる(ステップ47)。
When it is determined in
また、ステップ30において、床ブラシ23が接地していると判断したときには、制御手段37は、例えば被掃除面の塵埃量が多く、かつ、使用者が床ブラシ23を接地させて通常どおり前後に床ブラシ23を往復動させて掃除をしている掃除状態などと想定して、制御手段37は、トライアックTr1により設定する電動送風機18の入力の位相角を上記電動送風機用第5値として、電動送風機18を上記第5電動送風機入力(パワー5)で動作させるとともに、トライアックTr2により設定する電動機52の入力の位相角を電動機用第4値よりも大きい最大値である所定の電動機用第5値として、電動機52を第4電動機入力よりも大きい最大入力である所定の第5電動機入力で動作させることにより、回転ブラシ51を第4回転数よりも大きい最大回転数である所定の第5回転数(回転数5)で回転させる(ステップ48)。
Further, when it is determined in
このように、床ブラシ23、あるいはつる口などの吸込口体の接地状態(接続状態)を接地検出手段55により検出し、制御手段37が、光センサ33により検出した塵埃量、動作検出手段45により検出した手元操作部27の動作、および、接地検出手段55により検出した吸込口体の接地状態(接続状態)に対応して電動送風機18および電動機52(回転ブラシ51)の駆動を制御することで、使用者の掃除状態を、より精度よく想定することが可能になり、掃除状態により適した電力で掃除でき、一層の省エネルギ化が可能になる。すなわち、例えば床ブラシ23が接地しているとき(接続されているとき)には、床ブラシ23を接地していないとき(接続していないとき)よりも電動送風機18の入力(パワー)を増加させているので、例えばパワーが必要となる床ブラシ23を用いて床面などの被掃除面を掃除するときと、床ブラシ23と比較してパワーが小さくてよい、つる口などの吸込口体を用いた掃除のときとを制御手段37が識別でき、電動送風機18の入力をより適正に設定できる。しかも、接地検出手段55が床ブラシ23の非接地(非接続)を検出したときには、電動機52(回転ブラシ51)を停止させるので、不要な消費電力を抑制して、より一層の省エネルギ化が可能になる。
In this way, the grounding state (connection state) of the suction inlet body such as the
次に、第5の実施形態を図17および図18を参照して説明する。なお、上記各実施形態と同様の構成および作用については、同一符号を付してその説明を省略する。 Next, a fifth embodiment will be described with reference to FIGS. In addition, about the structure and effect | action similar to said each embodiment, the same code | symbol is attached | subjected and the description is abbreviate | omitted.
この第5の実施形態は、基本的に上記第4の実施形態と同様の構成を有しているが、制御手段37による制御が上記第4の実施形態と異なるものである。 The fifth embodiment basically has the same configuration as that of the fourth embodiment, but the control by the control means 37 is different from that of the fourth embodiment.
具体的に、この第5の実施形態は、上記第4の実施形態のステップ45ないしステップ48の各制御に代えて、以下のステップ51ないしステップ54の各制御を行う。
Specifically, in the fifth embodiment, the following controls in
すなわち、図17に示すマトリクスおよび図18に示すフローチャートを参照しながら説明すると、ステップ27において、床ブラシ23が接地していないと判断したときには、制御手段37は、例えば家具と壁との隙間などの狭い場所に、例えば床ブラシ23を取り外してつる口などの他の吸込口体を接続し、吸込風量によって溜まっている塵埃を吸い込むために、所定の時間、吸込口体を静止させて掃除する掃除状態などと想定して、制御手段37は、トライアックTr1により設定する電動送風機18の入力の位相角を上記電動送風機用第5値として、電動送風機18を上記第5電動送風機入力(パワー4)で動作させるとともに、トライアックTr2により設定する電動機52の入力の位相角を0として、電動機52すなわち回転ブラシ51を停止させる(ステップ51)。
That is, with reference to the matrix shown in FIG. 17 and the flowchart shown in FIG. 18, when it is determined in
また、ステップ27において、床ブラシ23が接地していると判断したときには、制御手段37は、例えば塵埃量が多い被掃除面の隅、あるいは壁際などの位置に対して、床ブラシ23を接地させて集中的に掃除している掃除状態などと想定して、制御手段37は、トライアックTr1により設定する電動送風機18の入力の位相角を上記電動送風機用第5値として、電動送風機18を上記第5電動送風機入力(パワー5)で動作させるとともに、トライアックTr2により設定する電動機52の入力の位相角を上記電動機用第5値として、電動機52を上記第5電動機入力で動作させることにより、回転ブラシ51を上記第5回転数(回転数5)で回転させる(ステップ52)。
Further, when it is determined in
さらに、ステップ30において、床ブラシ23が接地していないと判断したときには、制御手段37は、例えば塵埃量が多い棚の上など広範囲の被掃除面に対して、例えば床ブラシ23(および延長管22)を取り外して家具ブラシなどの他の吸込口体を用いて掃除している掃除状態などと想定して、制御手段37は、トライアックTr1により設定する電動送風機18の入力の位相角を上記電動送風機用第3値として、電動送風機18を上記第3電動送風機入力(パワー3)で動作させるとともに、トライアックTr2により設定する電動機52の入力の位相角を0として、電動機52すなわち回転ブラシ51を停止させる(ステップ53)。
Further, when it is determined in
そして、ステップ30において、床ブラシ23が接地していると判断したときには、制御手段37は、例えば被掃除面の塵埃量が多く、かつ、使用者が床ブラシ23を接地させて通常どおり前後に床ブラシ23を往復動させて掃除をしている掃除状態などと想定して、制御手段37は、トライアックTr1により設定する電動送風機18の入力の位相角を上記電動送風機用第4値として、電動送風機18を上記第4電動送風機入力(パワー4)で動作させるとともに、トライアックTr2により設定する電動機52の入力の位相角を上記電動機用第4値として、電動機52を上記第4電動機入力で動作させることにより、回転ブラシ51を上記第4回転数(回転数4)で回転させる(ステップ54)。
When it is determined in
このように、光センサ33により検出した塵埃量が所定量以上で、かつ、動作検出手段45により手元操作部27が動作していないことを検出した場合には、例えば使用者が被掃除面の隅、あるいは壁際などの位置に対して、床ブラシ23、あるいはつる口などの吸込口体を用いて集中的に掃除している掃除状態であると制御手段37が想定し、この制御手段37が、少なくとも電動送風機18の入力を相対的に増加、具体的には電気掃除機11の種類などに応じて予め設定されている最大の入力で駆動させることで、使用者の掃除状態に対応して効果的に塵埃を掃除することが可能になり、使い勝手が向上する。
As described above, when the dust amount detected by the
また、光センサ33により検出した塵埃量が所定量以上で、かつ、動作検出手段45により手元操作部27が動作していないことを検出しているとともに、接地検出手段55が床ブラシ23の接地を検出している場合には、例えば使用者が被掃除面の隅、あるいは壁際などの位置に対して、床ブラシ23を被掃除面に接地させて集中的に掃除をしている掃除状態であると制御手段37が想定し、この制御手段37が、電動送風機18とともに電動機52の入力も相対的に増加、具体的には電気掃除機11の種類などに応じて予め設定されている最大の入力でそれぞれ駆動させることで、使用者の掃除状態に対応して、より効果的に塵埃を掃除することが可能になり、使い勝手がより向上する。
In addition, the amount of dust detected by the
すなわち、動作検出手段45のみを備える場合には、手元操作部27が動作していないことを検出したときに制御手段37が入力を低下させてしまうおそれがあるものの、本実施形態では、光センサ33および動作検出手段45の双方を備えることにより、上記のような、使用者が被掃除面の隅、あるいは壁際などの位置に対して、床ブラシ23、あるいはつる口などの吸込口体を用いて集中的に掃除している掃除状態であるときにでも対応できる。したがって、電動送風機18および/または電動機52(回転ブラシ51)を、掃除状態により適した電力で駆動させることができ、確実に掃除できる。換言すれば、光センサ33および動作検出手段45の双方を備えることにより、掃除状態を相補的に検出でき、効果的に掃除できる。
That is, in the case where only the
次に、第6の実施形態を図19および図20を参照して説明する。なお、上記各実施形態と同様の構成および作用については、同一符号を付してその説明を省略する。 Next, a sixth embodiment will be described with reference to FIGS. 19 and 20. In addition, about the structure and effect | action similar to said each embodiment, the same code | symbol is attached | subjected and the description is abbreviate | omitted.
この第6の実施形態は、基本的に上記第4の実施形態と同様の構成を有しているが、制御手段37による制御が上記第4の実施形態と異なるものである。 The sixth embodiment basically has the same configuration as that of the fourth embodiment, but the control by the control means 37 is different from that of the fourth embodiment.
具体的に、この第6の実施形態は、上記第4の実施形態のステップ43ないしステップ48の各制御に代えて、以下のステップ61ないしステップ66の制御を行う。
Specifically, in the sixth embodiment, the following control in
すなわち、図19に示すマトリクスおよび図20に示すフローチャートを参照しながら説明すると、ステップ24において、床ブラシ23が接地していないと判断したときには、例えばサッシなどの被掃除面の奥にこびり付いた塵埃を、例えば床ブラシ23を取り外してつる口などの他の吸込口体を接続して掃除するときなど、塵埃量は比較的少ないものの強いパワーを要する掃除状態などと想定して、制御手段37は、トライアックTr1により設定する電動送風機18の入力の位相角を上記電動送風機用第5値として、電動送風機18を上記第5電動送風機入力(パワー4)で動作させるとともに、トライアックTr2により設定する電動機52の入力の位相角を0として、電動機52すなわち回転ブラシ51を停止させる(ステップ61)。
That is, with reference to the matrix shown in FIG. 19 and the flowchart shown in FIG. 20, when it is determined in
また、ステップ24において、床ブラシ23が接地していると判断したときには、制御手段37は、例えば絨毯などの被掃除面に絡み付いた糸ごみなどの塵埃を、床ブラシ23を小刻みに移動させて掃除しようとしている掃除状態などと想定して、制御手段37は、トライアックTr1により設定する電動送風機18の入力の位相角を上記電動送風機用第5値として、電動送風機18を上記第5電動送風機入力(パワー5)で動作させるとともに、トライアックTr2により設定する電動機52の入力の位相角を上記電動機用第5値として、電動機52を上記第5電動機入力で動作させることにより、回転ブラシ51を上記第5回転数(回転数5)で回転させる(ステップ62)。
Further, when it is determined in
さらに、ステップ27において、床ブラシ23が接地していないと判断したときには、制御手段37は、例えば家具と壁との隙間などの狭い場所に、例えば床ブラシ23を取り外してつる口などの他の吸込口体を接続し、吸込風量によって溜まっている塵埃を吸い込むために、所定の時間、吸込口体を静止させて掃除する掃除状態などと想定して、制御手段37は、トライアックTr1により設定する電動送風機18の入力の位相角を上記電動送風機用第2値として、電動送風機18を上記第2電動送風機入力(パワー2)で動作させるとともに、トライアックTr2により設定する電動機52の入力の位相角を0として、電動機52すなわち回転ブラシ51を停止させる(ステップ63)。
Further, when it is determined in
さらに、ステップ27において、床ブラシ23が接地していると判断したときには、制御手段37は、例えば被掃除面の隅、あるいは壁際などを床ブラシ23により掃除しようとしている掃除状態などと想定して、制御手段37は、トライアックTr1により設定する電動送風機18の入力の位相角を上記電動送風機用第3値として、電動送風機18を上記第3電動送風機入力(パワー3)で動作させるとともに、トライアックTr2により設定する電動機52の入力の位相角を上記電動機用第3値として、電動機52を上記第3電動機入力で動作させることにより、回転ブラシ51を上記第3回転数(回転数3)で回転させる(ステップ64)。
Further, when it is determined in
また、ステップ30において、床ブラシ23が接地していないと判断したときには、制御手段37は、例えば塵埃量が多い棚の上など広範囲の被掃除面に対して、例えば床ブラシ23(および延長管22)を取り外して家具ブラシなどの他の吸込口体を用いて掃除している掃除状態などと想定して、制御手段37は、トライアックTr1により設定する電動送風機18の入力の位相角を上記電動送風機用第3値として、電動送風機18を上記第3電動送風機入力(パワー3)で動作させるとともに、トライアックTr2により設定する電動機52の入力の位相角を0として、電動機52すなわち回転ブラシ51を停止させる(ステップ65)。
Further, when it is determined in
さらに、ステップ30において、床ブラシ23が接地していると判断したときには、制御手段37は、例えば被掃除面の塵埃量が多く、かつ、使用者が床ブラシ23を接地させて通常どおり前後に床ブラシ23を往復動させて掃除をしている掃除状態などと想定して、制御手段37は、トライアックTr1により設定する電動送風機18の入力の位相角を上記電動送風機用第4値として、電動送風機18を上記第4電動送風機入力(パワー4)で動作させるとともに、トライアックTr2により設定する電動機52の入力の位相角を上記電動機用第4値として、電動機52を上記第4電動機入力で動作させることにより、回転ブラシ51を上記第4回転数(回転数4)で回転させる(ステップ66)。
Further, when it is determined in
このように、制御手段37が、光センサ33により検出した塵埃量が所定量以下で、かつ、動作検出手段45により手元操作部27が動作していることを検出した場合には、例えば使用者が絨毯などの被掃除面に絡み付いて取りづらい糸ごみなどの塵埃を、床ブラシ23、あるいはつる口などの吸込口体を用いて掃除している掃除状態であると制御手段37が想定し、この制御手段37が、少なくとも電動送風機18の入力を相対的に増加、具体的には電気掃除機11の種類などに応じて予め設定されている最大の入力で駆動させることで、使用者の掃除状態に対応して効果的に塵埃を掃除することが可能になり、使い勝手が向上する。
Thus, when the
また、光センサ33により検出した塵埃量が所定量以下で、かつ、動作検出手段45により手元操作部27が動作していることを検出しているとともに、接地検出手段55が床ブラシ23の接地を検出している場合には、例えば使用者が絨毯などの被掃除面に絡み付いて取りづらい糸ごみなどの塵埃を、床ブラシ23を用いて掃除している掃除状態であると制御手段37が想定し、この制御手段37が、電動送風機18とともに電動機52の入力も相対的に増加、具体的には電気掃除機11の種類などに応じて予め設定されている最大の入力でそれぞれ駆動させることで、使用者の掃除状態に対応して、より効果的に塵埃を掃除することが可能になり、使い勝手がより向上する。
In addition, the amount of dust detected by the
すなわち、光センサ33のみを備える場合には、例えば糸ごみなどが絡み付いている絨毯などの被掃除面を掃除する際、初期に粉塵が吸い込まれることで塵埃量が所定量以上と判断されるが、糸ごみだけが被掃除面に残ると塵埃量は所定量以下と誤判断して制御手段37が入力を低下させてしまうおそれがあるものの、本実施形態では、光センサ33および動作検出手段45の双方を備えることにより、上記のような、使用者が絨毯などの被掃除面に絡み付いて取りづらい糸ごみなどの塵埃を、床ブラシ23、あるいはつる口などの吸込口体を用いて掃除している掃除状態であるときにでも対応できる。したがって、電動送風機18および/または電動機52(回転ブラシ51)を、掃除状態により適した電力で駆動させることができ、確実に掃除できる。換言すれば、光センサ33および動作検出手段45の双方を備えることにより、掃除状態を相補的に検出でき、効果的に掃除できる。
That is, when only the
なお、上記第5の実施形態のステップ51の制御、および、第6の実施形態のステップ61の制御は、それぞれ接地検出手段55、あるいは床ブラシ23を有さない構成の場合でも適用できる。すなわち、上記第1の実施形態のステップ7、あるいは上記第2の実施形態のステップ13に代えて、上記第5の実施形態のステップ51の制御をしてもよいし、上記第1の実施形態のステップ5、あるいは上記第2の実施形態のステップ12に代えて、上記第6の実施形態のステップ61の制御をして、少なくとも電動送風機18の入力を増加させるように構成してもよい。また、上記第5の実施形態の制御と第6の実施形態の制御とを組み合わせてもよい。
Note that the control in
そして、以上説明した各実施形態によれば、制御手段37が、光センサ33により検出した塵埃量、および、動作検出手段45により検出した手元操作部27の動作に基づいて少なくとも電動送風機18の駆動を制御することで、少なくとも光センサ33からの情報と動作検出手段45からの情報との2つの情報に基づいて使用者の掃除状態を精度よく想定でき、掃除状態に適した電力で掃除でき、省エネルギ化が可能になる。
Then, according to each embodiment described above, the
なお、上記各実施形態において、手元操作部27は、風路形成体13を把持操作するものとしたが、例えば掃除機本体12の下部に床ブラシ23を接続した、いわゆるアップライト型の電気掃除機などの場合には、掃除機本体12を把持操作するためのものとしてもよい。
In each of the embodiments described above, the
また、各電動送風機入力および各電動機入力については、各実施形態で共通の入力を用いて説明したが、互いの大小関係を保てば、実施形態毎に異なる入力でもよい。 In addition, each electric blower input and each electric motor input have been described using common inputs in each embodiment, but different inputs may be used for each embodiment as long as the mutual magnitude relationship is maintained.
そして、本発明のいくつかの実施形態を説明したが、これらの実施形態は、例として提示したものであり、発明の範囲を限定することは意図していない。これら新規な実施形態は、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、種々の省略、置き換え、変更を行うことができる。これら実施形態やその変形は、発明の範囲や要旨に含まれるとともに、特許請求の範囲に記載された発明とその均等の範囲に含まれる。 And although some embodiment of this invention was described, these embodiment is shown as an example and is not intending limiting the range of invention. These novel embodiments can be implemented in various other forms, and various omissions, replacements, and changes can be made without departing from the scope of the invention. These embodiments and modifications thereof are included in the scope and gist of the invention, and are included in the invention described in the claims and the equivalents thereof.
11 電気掃除機
12 掃除機本体
18 電動送風機
23 吸込口体としての床ブラシ
27 手元操作部
33 塵埃量検出手段としての光センサ
37 制御手段
45 動作検出手段
51 回転清掃体としての回転ブラシ
52 電動機
55 接地検出手段
W 風路
11 Vacuum cleaner
12 Vacuum cleaner body
18 Electric blower
23 Floor brush as inlet
27 Hand control
33 Optical sensor as dust detection means
37 Control means
45 Motion detection means
51 Rotating brush as rotating cleaning body
52 Electric motor
55 Ground detection means W Air passage
Claims (6)
前記電動送風機の吸込側に連通する風路と、
この風路を通過する塵埃量を検出する塵埃量検出手段と、
把持操作される手元操作部と、
この手元操作部の動作を検知する動作検出手段と、
前記塵埃量検出手段により検出した塵埃量、および、前記動作検出手段により検出した前記手元操作部の動作に基づいて前記電動送風機の駆動を制御する制御手段と
を具備したことを特徴とした電気掃除機。 A vacuum cleaner body containing an electric blower,
An air passage communicating with the suction side of the electric blower;
Dust amount detecting means for detecting the amount of dust passing through the air passage;
A hand control unit to be gripped,
An operation detecting means for detecting the operation of the hand operating unit;
And a control means for controlling the driving of the electric blower based on the amount of dust detected by the dust amount detection means and the operation of the hand operation unit detected by the operation detection means. Machine.
制御手段は、塵埃量検出手段により検出した塵埃量、および、動作検出手段により検出した手元操作部の動作に基づいて電動送風機および前記電動機の駆動をそれぞれ制御する
ことを特徴とした請求項1記載の電気掃除機。 An electric motor and a rotary cleaning body that is rotationally driven by the electric motor, and a suction port body that can configure a part of the air path,
The control unit controls the electric blower and the drive of the electric motor based on the amount of dust detected by the dust amount detection unit and the operation of the hand operation unit detected by the operation detection unit, respectively. Electric vacuum cleaner.
この吸込口体の接地状態を検出する接地検出手段とを具備し、
制御手段は、塵埃量検出手段により検出した塵埃量、動作検出手段により検出した手元操作部の動作、および、前記接地検出手段により検出した前記吸込口体の接地状態に基づいて電動送風機の駆動を制御する
ことを特徴とした請求項1記載の電気掃除機。 A suction port that can form part of the air passage;
Comprising a grounding detection means for detecting the grounding state of the suction port body,
The control means drives the electric blower based on the amount of dust detected by the dust amount detection means, the operation of the hand operating unit detected by the motion detection means, and the grounding state of the suction port detected by the grounding detection means. The electric vacuum cleaner according to claim 1, wherein the electric vacuum cleaner is controlled.
制御手段は、塵埃量検出手段により検出した塵埃量、動作検出手段により検出した手元操作部の動作、および、前記接地検出手段により検出した前記吸込口体の接地状態に基づいて電動送風機および前記電動機の駆動を制御する
ことを特徴とした請求項2記載の電気掃除機。 Provided with a grounding detection means for detecting the grounding state of the suction port body,
The control means includes the electric blower and the electric motor based on the amount of dust detected by the dust amount detection means, the operation of the hand operating unit detected by the operation detection means, and the grounding state of the suction port detected by the grounding detection means The electric vacuum cleaner according to claim 2, wherein the driving of the electric vacuum cleaner is controlled.
ことを特徴とした請求項1ないし4いずれか一記載の電気掃除機。 When the control unit detects that the amount of dust detected by the dust amount detection unit is equal to or greater than a predetermined amount and the operation detection unit does not operate, the control unit relatively sets at least the input of the electric blower. The vacuum cleaner according to claim 1, wherein the vacuum cleaner is increased.
ことを特徴とした請求項1ないし5いずれか一記載の電気掃除機。 When the control unit detects that the amount of dust detected by the dust amount detection unit is equal to or less than a predetermined amount and the operation detection unit is operating, at least the input of the electric blower is relatively The vacuum cleaner according to any one of claims 1 to 5, wherein the vacuum cleaner is increased.
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010243615A JP5916990B2 (en) | 2010-10-29 | 2010-10-29 | Electric vacuum cleaner |
| CN201110331381.8A CN102462452B (en) | 2010-10-29 | 2011-10-27 | Electric cleaner |
| RU2011143900/12A RU2486858C1 (en) | 2010-10-29 | 2011-10-28 | Electric vacuum cleaner |
| KR1020110111485A KR101411028B1 (en) | 2010-10-29 | 2011-10-28 | Electric cleaner |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010243615A JP5916990B2 (en) | 2010-10-29 | 2010-10-29 | Electric vacuum cleaner |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012095700A true JP2012095700A (en) | 2012-05-24 |
| JP5916990B2 JP5916990B2 (en) | 2016-05-11 |
Family
ID=46066782
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010243615A Expired - Fee Related JP5916990B2 (en) | 2010-10-29 | 2010-10-29 | Electric vacuum cleaner |
Country Status (4)
| Country | Link |
|---|---|
| JP (1) | JP5916990B2 (en) |
| KR (1) | KR101411028B1 (en) |
| CN (1) | CN102462452B (en) |
| RU (1) | RU2486858C1 (en) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016158784A (en) * | 2015-02-27 | 2016-09-05 | 東芝ライフスタイル株式会社 | Vacuum cleaner |
| JP2020127693A (en) * | 2019-02-12 | 2020-08-27 | 東芝ライフスタイル株式会社 | Vacuum cleaner |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108814424B (en) * | 2018-08-06 | 2020-06-30 | 珠海格力电器股份有限公司 | Control method of dust removal device and dust collector |
| JP7226965B2 (en) * | 2018-10-26 | 2023-02-21 | 東芝ライフスタイル株式会社 | vacuum cleaner |
| GB2596862B (en) * | 2020-07-10 | 2023-06-07 | Dyson Technology Ltd | Vacuum cleaner |
Citations (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS59118126A (en) * | 1982-11-20 | 1984-07-07 | ブラザー工業株式会社 | vacuum cleaner |
| JPH02307420A (en) * | 1989-05-23 | 1990-12-20 | Matsushita Electric Ind Co Ltd | Vacuum cleaner power control device |
| JPH03237957A (en) * | 1990-02-15 | 1991-10-23 | Matsushita Electric Ind Co Ltd | vacuum cleaner |
| JPH04215733A (en) * | 1990-12-17 | 1992-08-06 | Matsushita Electric Ind Co Ltd | Vacuum cleaner |
| JPH0551229U (en) * | 1991-12-16 | 1993-07-09 | 東京電気株式会社 | Dust collector |
| JPH0751206A (en) * | 1993-08-11 | 1995-02-28 | Matsushita Electric Ind Co Ltd | Vacuum cleaner |
| JPH07327893A (en) * | 1994-06-06 | 1995-12-19 | Matsushita Electric Ind Co Ltd | Vacuum cleaner control circuit |
| JP2001000871A (en) * | 1999-06-22 | 2001-01-09 | Ngk Insulators Ltd | Ceramic honeycomb structure, ceramic honeycomb catalyst carrier, and ceramic honeycomb catalytic converter using the same |
| JP2010075612A (en) * | 2008-09-29 | 2010-04-08 | Panasonic Corp | Vacuum cleaner |
| JP2010094400A (en) * | 2008-10-20 | 2010-04-30 | Panasonic Corp | Vacuum cleaner |
| JP2010194208A (en) * | 2009-02-27 | 2010-09-09 | Panasonic Corp | Vacuum cleaner |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3049878B2 (en) * | 1991-10-24 | 2000-06-05 | 松下電器産業株式会社 | Electric vacuum cleaner |
| JPH05329083A (en) * | 1992-06-03 | 1993-12-14 | Tokyo Electric Co Ltd | Vacuum cleaner |
| JP2874473B2 (en) * | 1992-09-10 | 1999-03-24 | 株式会社日立製作所 | Electric vacuum cleaner |
| JPH07213468A (en) * | 1994-01-31 | 1995-08-15 | Hitachi Ltd | Vacuum cleaner control circuit |
| JPH11313789A (en) * | 1998-05-06 | 1999-11-16 | Matsushita Electric Ind Co Ltd | Vacuum cleaner controller |
| JP2000300488A (en) * | 1999-04-23 | 2000-10-31 | Matsushita Electric Ind Co Ltd | Electric vacuum cleaner |
| JP2001008871A (en) * | 1999-06-30 | 2001-01-16 | Matsushita Electric Ind Co Ltd | Electric vacuum cleaner |
| JP2007143818A (en) * | 2005-11-28 | 2007-06-14 | Matsushita Electric Ind Co Ltd | Electric vacuum cleaner |
-
2010
- 2010-10-29 JP JP2010243615A patent/JP5916990B2/en not_active Expired - Fee Related
-
2011
- 2011-10-27 CN CN201110331381.8A patent/CN102462452B/en not_active Expired - Fee Related
- 2011-10-28 KR KR1020110111485A patent/KR101411028B1/en not_active Expired - Fee Related
- 2011-10-28 RU RU2011143900/12A patent/RU2486858C1/en active
Patent Citations (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS59118126A (en) * | 1982-11-20 | 1984-07-07 | ブラザー工業株式会社 | vacuum cleaner |
| JPH02307420A (en) * | 1989-05-23 | 1990-12-20 | Matsushita Electric Ind Co Ltd | Vacuum cleaner power control device |
| JPH03237957A (en) * | 1990-02-15 | 1991-10-23 | Matsushita Electric Ind Co Ltd | vacuum cleaner |
| JPH04215733A (en) * | 1990-12-17 | 1992-08-06 | Matsushita Electric Ind Co Ltd | Vacuum cleaner |
| JPH0551229U (en) * | 1991-12-16 | 1993-07-09 | 東京電気株式会社 | Dust collector |
| JPH0751206A (en) * | 1993-08-11 | 1995-02-28 | Matsushita Electric Ind Co Ltd | Vacuum cleaner |
| JPH07327893A (en) * | 1994-06-06 | 1995-12-19 | Matsushita Electric Ind Co Ltd | Vacuum cleaner control circuit |
| JP2001000871A (en) * | 1999-06-22 | 2001-01-09 | Ngk Insulators Ltd | Ceramic honeycomb structure, ceramic honeycomb catalyst carrier, and ceramic honeycomb catalytic converter using the same |
| JP2010075612A (en) * | 2008-09-29 | 2010-04-08 | Panasonic Corp | Vacuum cleaner |
| JP2010094400A (en) * | 2008-10-20 | 2010-04-30 | Panasonic Corp | Vacuum cleaner |
| JP2010194208A (en) * | 2009-02-27 | 2010-09-09 | Panasonic Corp | Vacuum cleaner |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016158784A (en) * | 2015-02-27 | 2016-09-05 | 東芝ライフスタイル株式会社 | Vacuum cleaner |
| JP2020127693A (en) * | 2019-02-12 | 2020-08-27 | 東芝ライフスタイル株式会社 | Vacuum cleaner |
| JP7246954B2 (en) | 2019-02-12 | 2023-03-28 | 東芝ライフスタイル株式会社 | vacuum cleaner |
Also Published As
| Publication number | Publication date |
|---|---|
| KR101411028B1 (en) | 2014-06-30 |
| JP5916990B2 (en) | 2016-05-11 |
| RU2011143900A (en) | 2013-05-10 |
| KR20120046066A (en) | 2012-05-09 |
| CN102462452B (en) | 2014-12-31 |
| RU2486858C1 (en) | 2013-07-10 |
| CN102462452A (en) | 2012-05-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5620127B2 (en) | Electric vacuum cleaner | |
| JP5916990B2 (en) | Electric vacuum cleaner | |
| CN106343921B (en) | electric vacuum cleaner | |
| JP5321869B2 (en) | Electric vacuum cleaner | |
| JP2010115360A (en) | Vacuum cleaner | |
| KR101932074B1 (en) | Vacuum cleaner and control method for the same | |
| JP2012152303A (en) | Vacuum cleaner | |
| JP2014236780A (en) | Electric vacuum cleaner | |
| JP6258143B2 (en) | Electric vacuum cleaner | |
| KR20220121490A (en) | Vacuum cleaner and its control method | |
| JP2012200462A (en) | Vacuum cleaner | |
| JP2011183100A (en) | Vacuum cleaner | |
| JP5722170B2 (en) | Electric vacuum cleaner | |
| JP2012070883A (en) | Vacuum cleaner | |
| JP2012085856A (en) | Vacuum cleaner | |
| JP2009285177A (en) | Electric vacuum cleaner | |
| JP2011172746A (en) | Vacuum cleaner | |
| JP4709690B2 (en) | Electric vacuum cleaner | |
| JP2014161542A (en) | Vacuum cleaner | |
| JP2012115604A (en) | Vacuum cleaner | |
| JP2011194145A (en) | Vacuum cleaner | |
| JP2011183030A (en) | Vacuum cleaner | |
| JP2014171667A (en) | Vacuum cleaner | |
| JP2008110167A (en) | Electric vacuum cleaner | |
| JP2011183029A (en) | Vacuum cleaner |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20130613 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A712 Effective date: 20140204 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20140324 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140423 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140620 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20141203 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150121 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20150805 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150930 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20160309 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20160406 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5916990 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313117 |
|
| R371 | Transfer withdrawn |
Free format text: JAPANESE INTERMEDIATE CODE: R371 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313117 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| LAPS | Cancellation because of no payment of annual fees |