DE102022001772A1 - Fahrzeugoberflächenanalysevorrichtung und Verfahren zur Fahrzeugoberflächenanalyse - Google Patents
Fahrzeugoberflächenanalysevorrichtung und Verfahren zur Fahrzeugoberflächenanalyse Download PDFInfo
- Publication number
- DE102022001772A1 DE102022001772A1 DE102022001772.5A DE102022001772A DE102022001772A1 DE 102022001772 A1 DE102022001772 A1 DE 102022001772A1 DE 102022001772 A DE102022001772 A DE 102022001772A DE 102022001772 A1 DE102022001772 A1 DE 102022001772A1
- Authority
- DE
- Germany
- Prior art keywords
- recording
- vehicle
- camera
- image
- image recording
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images


Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B11/00—Measuring arrangements characterised by the use of optical techniques
- G01B11/24—Measuring arrangements characterised by the use of optical techniques for measuring contours or curvatures
- G01B11/245—Measuring arrangements characterised by the use of optical techniques for measuring contours or curvatures using a plurality of fixed, simultaneously operating transducers
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B11/00—Measuring arrangements characterised by the use of optical techniques
- G01B11/24—Measuring arrangements characterised by the use of optical techniques for measuring contours or curvatures
- G01B11/25—Measuring arrangements characterised by the use of optical techniques for measuring contours or curvatures by projecting a pattern, e.g. one or more lines, moiré fringes on the object
- G01B11/2518—Projection by scanning of the object
- G01B11/2522—Projection by scanning of the object the position of the object changing and being recorded
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C11/00—Photogrammetry or videogrammetry, e.g. stereogrammetry; Photographic surveying
- G01C11/02—Picture taking arrangements specially adapted for photogrammetry or photographic surveying, e.g. controlling overlapping of pictures
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N21/00—Investigating or analysing materials by the use of optical means, i.e. using sub-millimetre waves, infrared, visible or ultraviolet light
- G01N21/84—Systems specially adapted for particular applications
- G01N21/88—Investigating the presence of flaws or contamination
- G01N21/8851—Scan or image signal processing specially adapted therefor, e.g. for scan signal adjustment, for detecting different kinds of defects, for compensating for structures, markings, edges
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N21/00—Investigating or analysing materials by the use of optical means, i.e. using sub-millimetre waves, infrared, visible or ultraviolet light
- G01N21/84—Systems specially adapted for particular applications
- G01N21/88—Investigating the presence of flaws or contamination
- G01N21/95—Investigating the presence of flaws or contamination characterised by the material or shape of the object to be examined
- G01N21/9515—Objects of complex shape, e.g. examined with use of a surface follower device
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B2210/00—Aspects not specifically covered by any group under G01B, e.g. of wheel alignment, caliper-like sensors
- G01B2210/52—Combining or merging partially overlapping images to an overall image
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N21/00—Investigating or analysing materials by the use of optical means, i.e. using sub-millimetre waves, infrared, visible or ultraviolet light
- G01N21/84—Systems specially adapted for particular applications
- G01N21/88—Investigating the presence of flaws or contamination
- G01N21/8851—Scan or image signal processing specially adapted therefor, e.g. for scan signal adjustment, for detecting different kinds of defects, for compensating for structures, markings, edges
- G01N2021/8883—Scan or image signal processing specially adapted therefor, e.g. for scan signal adjustment, for detecting different kinds of defects, for compensating for structures, markings, edges involving the calculation of gauges, generating models
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N21/00—Investigating or analysing materials by the use of optical means, i.e. using sub-millimetre waves, infrared, visible or ultraviolet light
- G01N21/84—Systems specially adapted for particular applications
- G01N21/88—Investigating the presence of flaws or contamination
- G01N21/8851—Scan or image signal processing specially adapted therefor, e.g. for scan signal adjustment, for detecting different kinds of defects, for compensating for structures, markings, edges
- G01N2021/8887—Scan or image signal processing specially adapted therefor, e.g. for scan signal adjustment, for detecting different kinds of defects, for compensating for structures, markings, edges based on image processing techniques
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- General Health & Medical Sciences (AREA)
- Analytical Chemistry (AREA)
- Pathology (AREA)
- Immunology (AREA)
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Chemical & Material Sciences (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Biochemistry (AREA)
- Multimedia (AREA)
- Remote Sensing (AREA)
- Radar, Positioning & Navigation (AREA)
- Signal Processing (AREA)
- Length Measuring Devices By Optical Means (AREA)
Abstract
Die Erfindung betrifft eine Fahrzeugoberflächenanalysevorrichtung, aufweisend eine Objektaufnahmeeinheit (1) mit einer Bildkamera (2) zur Aufnahme von primären Objektpunkten, eine Positionskameraeinheit (4) mit zwei Positionskameras (5, 6) zur Aufnahme von sekundären Objektpunkten und eine Auswertungseinheit (7), wobei die Objektaufnahmeeinheit (1) und die Positionskameraeinheit (4) zueinander in einer festen Lagebeziehung angeordnet und zu einer Relativbewegung zu dem Fahrzeug (3) ausgebildet sind, wobei die Bewegungsrichtung der Relativbewegung von den optischen Achsen der Positionskameras (5, 6) abweicht, und wobei die Auswertungseinheit (7) mit der Objektaufnahmeeinheit (1) und der Positionskameraeinheit (4) verbunden und ausgebildet ist, die erste Bildaufnahme und die erste Positionsaufnahme mit einem ersten Zeitstempel und die zweite Bildaufnahme und die zweite Positionsaufnahme mit einem zweiten Zeitstempel zu versehen, einen sekundären Objektpunkt des Fahrzeugs (3) anhand der Positionsaufnahme zu identifizieren und diesem identifizierten sekundären Objektpunkt Koordinaten (x, y) und (x', y') zuzuordnen und die primären Objektpunkte aus der ersten Bildaufnahme den primären Objektpunkten aus der zweiten Bildaufnahme zuzuordnen und anhand der zugeordneten primären Objektpunkte eine finale Bildaufnahme bereitzustellen.
Ferner betrifft die Erfindung ein Verfahren zur Fahrzeugoberflächenanalyse.
Ferner betrifft die Erfindung ein Verfahren zur Fahrzeugoberflächenanalyse.
Description
- Die Erfindung betrifft eine Fahrzeugoberflächenanalysevorrichtung sowie ein Verfahren zur Fahrzeugoberflächenanalyse, mit der auch optisch schwer erfassbare Oberflächen in hoher Qualität abgebildet werden können.
- Der Stand der Technik beschreibt die Vermessung der Fahrzeugoberfläche in verschiedenen Aufbauvarianten und Verfahren.
- Fahrzeugoberflächen insbesondere von Personenkraftwagen weisen große Anteile von Lack- oder Glasoberflächen auf, deren optische Erfassung für eine Bewertung der Beschaffenheit sowie für eine Fehlererkennung schwierig ist. Solche Oberflächen sind arm an eindeutigen und signifikanten Bildmerkmalen. Zudem können Reflexionen dieser Oberflächen bei einer automatisierten Bildanalyse die Gefahr von Fehlinterpretationen bilden.
- Aus dem Stand der Technik ist es bekannt, die Oberflächen von Fahrzeugen dreidimensional zu erfassen. Eine dreidimensionale Erfassung erfolgt durch Abtasten der Oberfläche mit Bildkameras, Laser-, Infrarot- oder Ultraschallsensoren. Die so erzeugte Punktewolke wird durch Interpolation dann zu einer stetigen Oberfläche erweitert. Ein möglicher Nachteil dieser Lösungen ergibt sich aus der Auflösung des Messverfahrens. Wird die Abtastauflösung zu gering gewählt, können kleine Unstetigkeiten in der Oberfläche nicht ausreichend aufgelöst werden. Zu hohe Auflösungen bei der Messung wiederum bedingen sehr lange Messzeiten und einen sehr hohen Rechenbedarf bei der Interpolation.
- Weiterhin ist aus dem Stand der Technik die Nutzung von Stereokameras bekannt. Die in einem definierten Abstand parallel zueinander positionierten Stereokameras nehmen jeweils ein Bild des gleichen Erfassungsbereichs auf. Aus der Parallaxe zugeordneter Bildpunkte lassen sich ebenfalls 3D-Bilder errechnen. Nachteilig ist hierbei, dass die Zuordnung signifikante Bildpunkte voraussetzt, was bei reflektierenden und merkmalsarmen Oberflächen nicht immer gewährleistet werden kann.
- Eine Lösung, die eine hochwertige Fahrzeugoberflächenanalyse bereitstellt, wird beispielsweise durch
EP 3 775 764 B1 beschrieben. Das zu analysierende Fahrzeug wird hier auf einer drehbaren Plattform positioniert und mit einer Mehrzahl von Einzelerfassungssystemen in unterschiedlichen Winkelpositionen erfasst, wobei die Erfassungsergebnisse der Einzelerfassungssysteme einem einheitlichen Koordinatensystem zugeordnet werden. Die Realisierung dieser hochwertigen Lösung ist technisch jedoch sehr anspruchsvoll. - Die Aufgabe der Erfindung ist es, eine zuverlässige und kostengünstige Vorrichtung sowie ein Verfahren für eine qualitativ hochwertige Fahrzeugoberflächenanalyse anzugeben.
- Die Aufgabe wird in Bezug auf die Vorrichtung durch die im Patentanspruch 1 aufgeführten Merkmale und in Bezug auf das Verfahren durch die im Patentanspruch 5 aufgeführten Merkmale gelöst. Bevorzugte Weiterbildungen ergeben sich aus den jeweiligen Unteransprüchen.
- Die erfindungsgemäße Fahrzeugoberflächenanalysevorrichtung weist eine Objektaufnahmeeinheit, eine Positionskameraeinheit und eine Auswertungseinheit auf.
- Die Objektaufnahmeeinheit weist mindestens eine Bildkamera auf, die einen Bildkameraerfassungsbereich besitzt und so ausgebildet ist, dass zumindest abschnittsweise ein Fahrzeug erfassbar ist.
- Die Objektaufnahmeeinheit ist zur Erfassung von primären Objektdaten von primären Objektpunkten des Fahrzeugs zu einem ersten Zeitpunkt als eine erste Bildaufnahme und zu einem zweiten Zeitpunkt als eine zweite Bildaufnahme ausgebildet.
- Als die primären Objektpunkte im Sinne der vorliegenden Erfindung werden die Objektpunkte der Fahrzeugoberfläche verstanden, von denen im Ergebnis ein Abbild erzeugt werden soll. Es handelt sich also um die interessierenden und zu analysierenden Objektpunkte. Hierzu zählen insbesondere auch die merkmalsarmen, aber dennoch qualitätskritischen Fahrzeugoberflächenabschnitte wie Lackoberflächen.
- Als primäre Objektdaten im Sinne der vorliegenden Erfindung werden die durch Bildaufnahmen oder sonstige Erfassungen von den primären Objektpunkten erhaltenen Daten verstanden.
- Die zu dem ersten Zeitpunkt vorgenommene Bildaufnahme wird vorliegend als die ersten Bildaufnahme und die zu einem zweiten, von dem ersten Zeitpunkt abweichenden Zeitpunkt aufgenommene Bildaufnahme wird als die zweite Bildaufnahme bezeichnet.
- Die Bildkamera ist vorzugsweise mit einer sehr hohen optischen Auflösung ausgestattet, so dass sehr detaillierte Bilder aufgenommen werden können.
- Eine weitere Grundkomponente ist die Positionskameraeinheit. Die Positionskameraeinheit weist zwei Positionskameras auf. Die erste Positionskamera weist einen ersten Positionskameraerfassungsbereich und die zweite Positionskamera weist einen zweiten Positionskameraerfassungsbereich auf.
- Die Positionskameraerfassungsbereiche erfassen zumindest abschnittsweise das Fahrzeug.
Die Positionskameras sind zur Erfassung von sekundären Objektdaten von sekundären Objektpunkten des Fahrzeugs ausgebildet. - Als die sekundären Objektpunkte im Sinne der vorliegenden Erfindung werden die Objektpunkte der Fahrzeugoberfläche verstanden, die herangezogen werden, um eine Positionsreferenzierung des Fahrzeugs durchzuführen. Die sekundären Objektpunkte können somit als Hilfsobjektpunkte verstanden werden. Während die primären Objektpunkte durch die interessierenden Abschnitte der Fahrzeugoberfläche zwangsläufig vorgegeben sind, können die sekundären Objektpunkte nach Zweckmäßigkeitskriterien, insbesondere dem Kriterium einer guten optischen Erfassbarkeit ausgewählt werden. Hiermit wird anhand von klar auffindbaren Merkmalen die Positionsveränderung aus der Relativbewegung zwischen der ersten und zweiten Aufnahme identifiziert. Vorteilhaft geringe Reflexionen und eine hohe Dichte von Objektpunkten mit signifikanten Merkmalen weist beispielsweise der Fahrzeugunterboden auf. Solche Objektpunkt werden nachfolgend auch als robuste Objektpunkte bezeichnet. Es ist hierbei jedoch nicht ausgeschlossen, dass in besonderen Fällen die primären Objektpunkte zugleich sekundäre Objektpunkte sein können.
- Die erste Positionskamera ist zur Aufnahme von sekundären Objektdaten von sekundären Objektpunkten des Fahrzeugs zu einem ersten Zeitpunkt ausgebildet. Hierbei handelt es sich um die erste Positionsaufnahme. In entsprechender Weise ist die zweite Positionskamera zur Aufnahme von sekundären Objektdaten von sekundären Objektpunkten des Fahrzeugs zu einem zweiten Zeitpunkt ausgebildet. Hierbei handelt es sich dann um die zweite Positionsaufnahme. Den beiden Positionsaufnahmen liegt eine Relativbewegung des Fahrzeugs zu der Positionskameraeinheit zu Grunde. Die Positionsaufnahmen sind somit Aufnahmen der sekundären Objektpunkte zu unterschiedlichen Zeitpunkten und mit unterschiedlichen Positionen des Fahrzeugs.
- Die Objektaufnahmeeinheit und die Positionskameraeinheit stehen zueinander in einer festen Lagebeziehung. Vorzugsweise sind die Kameras oder Systeme der Objektaufnahmeeinheit und die Positionskameras ortsfest oder an einem gemeinsamen Gestell montiert.
- Die Objektaufnahmeeinheit und die Positionskameraeinheit sind für eine Relativbewegung zu dem Fahrzeug ausgebildet. Die Bewegungsrichtung der Relativbewegung weicht von den optischen Achsen der Kameras ab. Vorzugsweise ist die Bewegungsrichtung quer, besonders bevorzugt exakt orthogonal.
- Als Relativbewegung wird verstanden, dass sich das zu analysierende Fahrzeug entlang der Vorrichtung bewegt oder dass die Vorrichtung vorzugsweise exakt linear zu dem Fahrzeug verfahrbar ist.
- Die Bilder durch die Objektaufnahmeeinheit und die Positionskameraeinheit werden in einem bestimmten Winkel zur Bewegungsrichtung erstellt. Das Fahrzeug wird somit seitlich oder von oben oder unten aufgenommen.
- Die Auswertungseinheit ist mit der Objektaufnahmeeinheit und der Positionskameraeinheit verbunden. Diese ist weiterhin ausgebildet, die erste Bildaufnahme und die erste Positionsaufnahme mit einem ersten Zeitstempel, nachfolgend auch erster Bildaufnahmezeitstempel und erster Positionsaufnahmezeitstempel genannt, und die zweite Bildaufnahme und die zweite Positionsaufnahme mit einem zweiten Zeitstempel, nachfolgend auch zweiter Bildaufnahmezeitstempel und zweiter Positionsaufnahmezeitstempel genannt, zu versehen.
- Weiterhin ist die Auswertungseinheit ausgebildet, einen sekundären Objektpunkt des Fahrzeugs anhand der ersten Positionsaufnahme zu identifizieren und diesem identifizierten sekundären Objektpunkt Koordinaten (x, y) zuzuordnen. Zudem ist die Auswertungseinheit ausgebildet den identifizierten sekundären Objektpunkt des Fahrzeugs anhand der zweiten Positionsaufnahme zu erkennen und diesem sekundären Objektpunkt Koordinaten (x', y') zuzuordnen. Damit liegen alle Informationen vor, um einen Positionsabstand zwischen dem sekundären Objektpunkt in der ersten und zweiten Positionsaufnahme zu ermitteln.
- Entsprechend ist die Auswertungseinheit ausgebildet, mittels
- - der Zeitstempel,
- - eines in der Auswertungseinheit hinterlegten Abstands zwischen dem ersten und dem zweiten Positionskameraerfassungsbereich,
- - einer Winkelposition des identifizierten Objektspunkts in der ersten und zweiten Positionsaufnahme,
- Anhand des Positionsabstands kann die Auswertungseinheit dann die primären Objektpunkte aus der ersten Bildaufnahme den primären Objektpunkten aus der zweiten Bildaufnahme zuordnen und anhand der einander zugeordneten primären Objektpunkte aus beiden Bildaufnahmen eine finale Bildaufnahme bereitstellen.
- Die finale Bildaufnahme vereint somit die Bildinformationen aus der ersten und der zweiten Bildaufnahme. Qualitativ unzureichende Objektdaten zu bestimmten primären Objektpunkten beispielsweise aus der ersten Bildaufnahme können so durch bessere Objektdaten zu denselben primären Objektpunkten aus der zweiten Bildaufnahme kompensiert werden und umgekehrt. Wenn das Fahrzeug erfindungsgemäß zum Zeitpunkt der ersten Bildaufnahme eine andere relative Position aufweist als zum Zeitpunkt der zweiten Bildaufnahme besteht eine hohe Wahrscheinlichkeit, dass beispielsweise Reflexionen zu einem bestimmten primären Objektpunkt lediglich in einer der beiden Bildaufnahmen vorliegen. Ferner können auch qualitativ hochwertige Objektdaten aus beiden Bildaufnahmen zusammengeführt werden, so dass dann diese primären Objektpunkte in der finalen Bildaufnahme eine über eine reguläre Bildaufnahme hinausgehende Aussagekraft haben können.
- Die Auswertungseinheit ist vorzugsweise als prozessorgesteuertes System, das zur elektronischen Verarbeitung der Bilddaten eingerichtet ist, ausgebildet. Insbesondere kann es sich um einen Rechner handeln. Dazu kann die Auswertungseinheit festgelegte Programmroutinen ausführen, die zum Teil durch künstliche Intelligenz unterstützt werden. Vorzugsweise weist die Auswertungseinheit Fähigkeiten des Machine Learnings auf. Hier werden in einem selbstlernenden Prozess die Programmroutinen zur Bilderkennung mit jedem Durchlauf verfeinert. Dadurch wird die Möglichkeit der automatischen Erkennung von potenziell fehlerhaften Stellen der Fahrzeugoberfläche wesentlich gesteigert.
- Die erfindungsgemäße Fahrzeugoberflächenanalysevorrichtung weist somit insbesondere nachfolgende Vorteile auf.
- Es können vorteilhaft die primären Objektpunkte aus mehreren Aufnahmen übereinandergelegt werden. Somit kann ein Bild mit wesentlich mehr Informationen zu den schwer erfassbaren Objektpunkten, nachfolgend auch problematische Objektpunkte genannt, bereitgestellt werden. Als Beispiel wären Reflektionen auf der Oberfläche nur in einem Bild der Serie von Aufnahmen vorhanden. In den weiteren Aufnahmen der gleichen Serien wären die Reflektionen nicht vorhanden und dadurch können diese störenden Einflüsse herausgerechnet werden.
- Besonders vorteilhaft ist es hierbei, dass allein auf einer optischen Erfassung basierend eine zuverlässige Erfassung und Analyse auch problematischer Objektpunkte möglich gemacht wird, indem eine Erfassung von robusten Objektpunkten als Hilfsmaßnahme erfolgt.
- In besonderen vorteilhaften Weiterbildungen können zudem mehrere Bildkameras vorliegen und die Vorrichtung kann ferner auch mehr als zwei Positionskameras aufweisen. Ferner kann die Vorrichtung auch für mehr als zwei Bildaufnahmen und mehr als zwei Positionsaufnahmen ausgebildet sein. Hierbei können zudem unterschiedliche Winkelpositionen der Aufnahmen genutzt werden.
- Gemäß einer vorteilhaften Weiterbildung ist die Fahrzeugoberflächenanalysevorrichtung dadurch gekennzeichnet, dass die Auswertungseinheit ferner ausgebildet ist anhand der Zeitstempel der Positionsaufnahmen, des Abstands zwischen dem ersten und dem zweiten Positionskameraerfassungsbereich und der Winkelposition des identifizierten Objektspunkts in der ersten und zweiten Positionsaufnahme zusätzlich zu dem Positionsabstand auch die Geschwindigkeit der Relativbewegung das Fahrzeugs zu ermitteln. Ausgehend von einer konstanten Geschwindigkeit besteht eine definierte Weg-Zeit-Beziehung. Anhand der Zeitstempel der Bildaufnahmen kann so für jede Bildaufnahme die Position bestimmt werden.
- Hierbei kann vorteilhaft in dem Bereich zwischen den Positionsaufnahmen interpoliert sowie davor und danach extrapoliert werden. Die räumliche Anordnung der Positionskameras und der Objektaufnahmeeinheit zueinander kann somit je nach konstruktiver Zweckmäßigkeit weitgehend frei gewählt werden.
- Gemäß einer vorteilhaften Weiterbildung ist die Fahrzeugoberflächenanalysevorrichtung dadurch gekennzeichnet, dass die optischen Achsen der Positionskameras parallel angeordnet sind. Diese Anordnung vereinfacht das Bilderkennungsverfahren, da sich die beiden Bilder lediglich in der Fahrzeugposition nicht aber in der Perspektive unterscheiden. Dadurch lässt sich die Theorie der Parallaxe unmittelbar anwenden und die die Berechnung wird in der Komplexität vereinfacht, was das Verfahren deutlich beschleunigt.
- Nach einer weiteren vorteilhaften Weiterbildung ist die Fahrzeugoberflächenanalysevorrichtung dadurch gekennzeichnet, dass die optischen Achsen der Positionskameras und die optische Achse der Bildkamera in einer Planebene quer zu der Relativbewegung des Fahrzeugs angeordnet sind.
- Diese Anordnung vereinfacht die Auswertung, da die erste Bildaufnahme und die erste Positionsaufnahme sowie die zweite Bildaufnahme und die zweite Positionsaufnahme jeweils zum gleichen Zeitpunkt erfolgen können. Hierbei erfassen die Positionskameras vorzugsweise den Fahrzeugunterboden von unten oder schräg von unten, während die Bildkamera beispielsweise von oben auf das Fahrzeug gerichtet ist.
- Entsprechend einer nächsten vorteilhaften Weiterbildung ist die Fahrzeugoberflächenanalysevorrichtung dadurch gekennzeichnet, dass die Objektaufnahmeeinheit mindestens eine Einzelerfassungseinheit aus der Gruppe:
- - TOF-Kamera,
- - Infrarotkamera,
- - Lasertriangulationssystem,
- - Musterlichtsprojektionssystem,
- - Deflektometriesystem,
- - Reflektometriesystem,
- Die verschiedenen Erfassungssysteme sind vorteilhaft auf eine bestimmte Detektionsart optimiert. So sind die TOF-Kameras, die Infrarotkamera und das Lasertriangulationssystem eher auf die formgebenden Teile der Fahrzeugkarosserie ausgelegt, da diese aufgrund von Messpunktewolken Hüllkonturen für Teile aus Blech oder ähnlichem untersuchen können. Wohingegen die Musterlichtprojektionen, die Deflektometriesystemen und die Reflektometriesysteme eher zu genauen Untersuchung der Finishschicht dienen. Besonders vorteilhaft kann die Objektaufnahmeeinheit auch mehrere der genannten Systeme zugleich aufweisen und so eine besonders aussagekräftige Fahrzeugoberflächenanalyse bereitstellen.
- Ein weiterer Aspekt der Erfindung betrifft ein Verfahren zur Fahrzeugoberflächenanalyse mittels der Objekterfassungseinheit, der Positionskameraeinheit und der Auswertungseinheit, aufweisend die folgenden Verfahrensschritte:
- a) Erfassen von primären Objektdaten von primären Objektpunkten des Fahrzeugs (3) mittels der Bildkamera (2) zu einem ersten Zeitpunkt als eine erste Bildaufnahme und Übertragen an die Auswertungseinheit (7) und Erzeugen eines ersten Bildaufnahmezeitstempels,
- b) Erfassen von sekundären Objektdaten von sekundären Objektpunkten des Fahrzeugs (3) mittels der ersten Positionskamera (5) zu einem ersten Zeitpunkt als eine erste Positionsaufnahme und Übertragen an die Auswertungseinheit (7) und Erzeugen eines ersten Positionsaufnahmezeitstempels,
- c) Durchführen einer Relativbewegung des Fahrzeugs (3) zu der Objektaufnahmeeinheit (1) und der Positionskameraeinheit (4),
- d) Erfassen von primären Objektdaten von primären Objektpunkten des Fahrzeugs (3) mittels der Bildkamera (2) zu einem zweiten Zeitpunkt als eine zweite Bildaufnahme und Übertragen an die Auswertungseinheit (7) und Erzeugen eines zweiten Bildaufnahmezeitstempels,
- e) Erfassen von sekundären Objektdaten von sekundären Objektpunkten des Fahrzeugs (3) mittels der zweiten Positionskamera zu einem zweiten Zeitpunkt als eine zweite Positionsaufnahme und Übertragen an die Auswertungseinheit (7) und Erzeugen eines zweiten Positionsaufnahmezeitstempels,
- f) Identifizieren eines sekundären Objektpunkts des Fahrzeugs (3) anhand der ersten Positionsaufnahme und Zuordnen von Koordinatendaten (x, y),
- g) Erkennen des identifizierten sekundären Objektpunkts anhand der zweiten Positionsaufnahme und Zuordnen von Koordinatendaten (x', y,'),
- h) Bestimmen eines Positionsabstands mittels
- - der Koordinatendaten des sekundären Objektpunkts x, y und x', y',
- - eines Abstands zwischen dem ersten und dem zweiten Positionskameraerfassungsbereich und
- - einer Winkelposition des identifizierten Objektspunkts in der ersten und zweiten Positionsaufnahme,
- i) Durchführen einer Zuordnung von den primären Objektpunkten aus der ersten Bildaufnahme zu den primären Objektpunkten aus der zweiten Bildaufnahme anhand des Positionsabstand,
- j) Erzeugen einer finalen Bildaufnahme mittels der primären Objektpunkte aus der ersten und aus der zweiten Bildaufnahme.
- Die Beschreibungsinhalte zur erfindungsgemäßen Vorrichtung gelten zu dem erfindungsgemäßen Verfahren in entsprechender Weise unter Einbeziehung der nachfolgenden Aspekte.
- Das Grundprinzip des Verfahrens besteht vorteilhaft darin, ein Panoramabild einer Fahrzeugoberfläche aus aneinandergefügten positionsreferenzierten Einzelbildern beim Durchfahren eines Fahrzeugs zu erstellen. Hierbei werden mehrere, mindestens zwei sequentielle Bildaufnahmen erstellt, wobei zwischen den Zeitpunkten der Aufnahmen eine Relativbewegung des Fahrzeugs vorgenommen wird. Ferner werden sekundäre Objektpunkte als robuste Objektpunkte mit der Positionskameraeinheit als einem zweiten System erfasst, so dass eine zuverlässige Zuordnung mindestens eines sekundären Objektpunktes aus zwei Positionsaufnahmen zu unterschiedlichen Zeitpunkten erfolgen kann und somit eine Information über einen Positionsabstand vorliegt. Anhand dieses Positionsabstands können dann die primären Objektpunkte aus den mindestens zwei sequentiellen Bildaufnahmen einander zugeordnet werden, so dass mehr Bildinformationen für die Erzeugung einer finalen Bildaufnahme bereitstehen, als bei einer einfachen Bildaufnahme.
- Gemäß einer vorteilhaften Weiterbildung des Verfahrens nach Anspruch 5 ist die Fahrzeugoberflächenanalysevorrichtung dadurch gekennzeichnet, dass Diese folgende weitere Verfahrensschritte aufweist:
- d1) Erfassen von primären Objektdaten von primären Objektpunkten des Fahrzeugs (3) mittels der Bildkamera (2) zu einem weiteren Zeitpunkt als eine weitere Bildaufnahme und Übertragen an die Auswertungseinheit (7) und Erzeugen eines weiteren Bildaufnahmezeitstempels,
- h1) Bestimmen einer Geschwindigkeit der Relativbewegung mittels
- - der Koordinatendaten des sekundären Objektpunkts x, y und x', y',
- - der Zeitstempel,
- - des Abstands zwischen dem ersten und dem zweiten Positionskameraerfassungsbereich und
- - der Winkelposition des identifizierten Objektspunkts in der ersten und zweiten Positionsaufnahme,
- h2) Bestimmen eines weiteren Positionsabstands mittels
- - der Geschwindigkeit der Relativbewegung
- - des weiteren Bildaufnahmezeitstempels
- i1) Durchführen einer Zuordnung von den primären Objektpunkten aus der weiteren Bildaufnahme zu den primären Objektpunkten aus der ersten und zweiten Bildaufnahme,
- Die vorteilhafte Weiterbildung des Verfahrens ist ferner dadurch gekennzeichnet, dass im Verfahrensschritt j) das Erzeugen der finalen Bildaufnahme mittels der primären Objektpunkte aus der ersten, der zweiten und der weiteren Bildaufnahme durchgeführt wird.
- Gemäß dieser Weiterbildung wird die Geschwindigkeit der Relativbewegung, bei der es sich vorzugsweise um eine gleichförmige Bewegung mit konstanter Geschwindigkeit handelt, ermittelt, so dass die Positionierung der Positionskameras und der Bildkamera oder weiterer Systeme voneinander weitgehend unabhängig sind. Die durch die Geschwindigkeit bekannte Weg-Zeit-Beziehung kann für die Zuordnung mehrerer Bildaufnahmen an unterschiedlichen Positionen herangezogen werden.
- Hierbei ist es vorteilhaft möglich, anhand des Zeitstempels sowohl interpolierend eine oder mehrere Bildaufnahmen zwischen den Fahrzeugpositionen oder Zeitpunkten der Positionsaufnahmen als auch extrapolierend vor der Fahrzeugposition oder dem Zeitpunkt der ersten Positionsaufnahme und/oder nach der Fahrzeugposition oder dem Zeitpunkt der zweiten Positionsaufnahme aufzunehmen. Vorteilhaft können nach dieser Weiterbildung die Positionen und Zeitpunkte der Bildaufnahmen von den Positionen und Zeitpunkten der mindestens zwei Positionsaufnahmen entkoppelt werden.
- Insbesondere ist es nach dieser Weiterbildung möglich die Bildkamera in einer schnellen Sequenz eine hohe Anzahl streifenförmiger Bildaufnahmen zu erstellen, wobei die Streifenform vertikal und somit quer zu der Bewegungsrichtung des Fahrzeugs ausgerichtet ist. Jede der Bildaufnahmen muss dabei lediglich einen streifenförmigen Abschnitt der Fahrzeugoberfläche erfassen. Die Auswertungseinheit kann dann anhand der Zeitstempel eine Zuordnung vornehmen, so dass die streifenförmigen Abschnitte der Fahrzeugoberfläche in der finalen Bildaufnahme zu einer Panoramaaufnahme entlang eines längeren Abschnitts oder in der gesamten Fahrzeuglänge zusammengesetzt werden können. Hierbei gilt zudem für alle Objektpunkte, die in dieser Panoramaaufnahme erfasst werden, dass jeweils ein und derselbe Objektpunkt in mehreren Bildaufnahmen in unterschiedlichen Winkelpositionen erfasst wird und die Bildinformationen sich für die Erzeugung einer hochqualitativen finalen Bildaufnahme erfindungsgemäß ergänzen und stützen.
- Die Erfindung wird als Ausführungsbeispiel anhand von
-
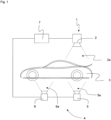
1 schematische Darstellung des Grundaufbaus -
2 schematische Darstellung eines ersten Zustands -
3 schematische Darstellung eines zweiten Zustands -
4 schematische Darstellung der Zeitbeziehungen im Verfahren -
5 schematische Darstellung der Zeitbeziehungen im Verfahren in einem anderen Ausführungsbeispiel - Hierbei beziehen sich gleiche Bezugszeichen in den verschiedenen Figuren auf jeweils gleiche Merkmale oder Bauteile. Die Bezugszeichen werden in der Beschreibung auch dann verwandt, sofern sie in der betreffenden Figur nicht dargestellt sind.
- Die
1 beschreibt den Grundaufbau eines Ausführungsbeispiels der Fahrzeugoberflächenanalysevorrichtung. - Als eine erste Grundkomponente der Fahrzeugoberflächenanalysevorrichtung ist eine Objektaufnahmeeinheit 1 mit der dazugehörigen Bildkamera 2 oberhalb einer Fahrstrecke für ein Fahrzeug 3 angeordnet. Der Bildkameraerfassungsbereich 2a der Bildkamera 2 ist so ausgerichtet, dass die Fahrzeugbreite komplett überspannt werden kann.
- Ferner ist an der Unterseite oder seitlich die Positionskameraeinheit 4 angeordnet. Diese besteht aus einer ersten und einer zweiten Positionskamera 5, 6. Diese sind in Überfahrrichtung nacheinander angeordnet. Der erste und zweite Positionskameraerfassungsbereich 5a, 6a umfasst einen Abschnitt des Fahrzeugunterbodens, nicht aber die gesamte Fahrzeuglänge.
- Die Positionskameras 5, 6 und die Bildkamera 2 sind mit der Auswertungseinheit 7, die als ein Rechner ausgebildet ist, verbunden.
- Beim Überfahren des Fahrzeugs 3 über die Positionskameraeinheit 4, zuerst durch den ersten Positionskameraerfassungsbereich 5a der ersten Positionskamera 5 und nachfolgend durch den zweiten Positionskameraerfassungsbereich 6a der zweiten Positionskamera 6 wird ein spezielles Merkmal am Unterboden des Fahrzeugs 3 durch die Auswertungseinheit 7 detektiert. Bei diesem Merkmal kann es sich beispielsweise um die vordere Begrenzung des Radkastens handeln. Mit Hilfe dieses Merkmals kann von der Auswertungseinheit 7 aus dem Zeitversatz der ersten Positionskameraaufnahme und der zweiten Positionskameraaufnahme sowie dem definierten Abstand der Positionskameras 5, 6 die Geschwindigkeit und exakte Position des Fahrzeugs 3 detektiert werden.
- Die Bildkamera 2 nimmt parallel hochauflösende Bilder der lackierten Oberfläche des Fahrzeugs 3 auf. Diese Bildaufnahmen von primären Objektpunkten werden mit einem Zeitstempel versehen, so dass damit mittelbar eine Position indiziert werden kann. Danach setzt die Auswertungseinheit 7 ein Abbild des Fahrzeugs 3 mit Hilfe der exakten Referenzpositionen zusammen. In dem vorliegenden Ausführungsbeispiel erfassen die Bildaufnahmen lediglich einen vertikalen Streifen und somit nur Teilabschnitte der Fahrzeugoberfläche. Die Bildaufnahmen der Teilabschnitte werden durch die Auswertungseinheit 7 bei der Erzeugung der finalen Bildaufnahme zu einem Panoramabild zusammengefügt, das die gesamte Länge des Fahrzeugs 3 erfasst.
- Die
2 und3 zeigen den gleichen schematischen Aufbau der Fahrzeugoberflächenanalysevorrichtung wie1 , wobei das Fahrzeug 3 in unterschiedlichen Positionen relativ zu der Objektaufnahmeeinheit 1 und zu den Positionskameras 5, 6 dargestellt ist. - In
2 befindet sich das Fahrzeug 3 zu einem ersten Zeitpunkt in einer Ausgangsposition beim Einfahren in die Vorrichtung. Als sekundärer Objektpunkt wird ein Merkmal am Fahrzeugunterboden durch die erste Positionskamera 5 aufgenommen und durch die Auswertungseinheit 7 erkannt. Parallel dazu beginnt die Bildkamera 2 mit der Aufnahme der hochauflösenden Bilder von den primären Objektpunkten. - Die
3 stellt den schematischen Aufbau der Fahrzeugoberflächenanalysevorrichtung in einer späteren Position des Fahrzeugs 3 zu einem zweiten Zeitpunkt dar. Das Fahrzeug 3 ist hier kurz vor dem Verlassen der Vorrichtung. Die zweite Positionskamera 6 hat nun ebenfalls das ausgewählte Merkmal am Fahrzeugunterboden aufgenommen und dieses wurde durch die Auswertungseinheit 7 detektiert. Die Auswertungseinheit 7 hat für die einzelnen Bilder der Bildkamera 2 die Positionen errechnet. Die Objektdaten aus den mehreren Bildaufnahmen zu den primären Objektpunkten werden von der Auswertungseinheit den jeweiligen primären Objektpunkten zugeordnet. Alle Objektdaten zu einem bestimmten primären Objektpunkt werden zusammengefasst. Aus der Gesamtheit der objektpunktbezogenen Objektdaten wird von der Auswertungseinheit 7 die finale Bildaufnahme zusammengesetzt und als Datei ausgegeben. -
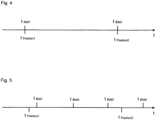
4 zeigt ein Ausführungsbeispiel des Verfahrens, bei dem die erste Bildaufnahme und die erste Positionsaufnahme zeitgleich zum Zeitpunkt t Bild 1 = t Position 1 aufgenommen wurden. Entsprechendes gilt für den gleichen Zeitpunkt der zweiten Bildaufnahme und zweiten Positionsaufnahme zum Zeitpunkt t Bild 2 = t Position 2. Damit ist der Positionsabstand unmittelbar bekannt. -
5 zeigt ein Ausführungsbeispiel des Verfahrens in einer Weiterbildung. Bei konstanter Geschwindigkeit des Fahrzeugs 3 in seiner Relativbewegung verhalten sich der Weg und die Zeit proportional, so dass aus der Zeitbeziehung der Zeitpunkte der Positionsaufnahmen t Position 1 und t Position 1 sowie aus der Zeitbeziehung zu den Zeitpunkten der mehreren Bildaufnahmen t Bild 1, t Bild 2, t Bild 3 und t Bild 4 zugleich mittels der Geschwindigkeit auch die Positionsabstände der vier Bildaufnahmen und damit der primären Objektpunkte in den vier Bildaufnahmen zueinander bekannt sind. Die Zeitpunkte der Aufnahmen und die Anordnung der Positionskameras 5, 6 sowie der mindestens einen Bildkamera 2 können nach konstruktiven Zweckmäßigkeitsgesichtspunkten gewählt werden. Zudem ist die Anzahl der Bildaufnahmen und der Positionsaufnahmen voneinander unabhängig. - Verwendete Bezugszeichen
-
- 1
- Objektaufnahmeeinheit
- 2
- Bildkamera
- 2a
- Bildkameraerfassungsbereich
- 3
- Fahrzeug
- 4
- Positionskameraeinheit
- 5
- erste Positionskamera
- 5a
- erster Positionskameraerfassungsbereich
- 6
- zweite Positionskamera
- 6a
- zweiter Positionskameraerfassungsbereich
- 7
- Auswertungseinheit
- t
- Zeit
- t Bild 1
- Zeitpunkt einer ersten Bildaufnahme
- t Bild 2
- Zeitpunkt einer zweiten Bildaufnahme
- t Bild 3
- Zeitpunkt einer dritten Bildaufnahme
- t Bild 4
- Zeitpunkt einer vierten Bildaufnahme
- t Position 1
- Zeitpunkt einer ersten Positionsaufnahme
- t Position 2
- Zeitpunkt einer zweiten Positionsaufnahme
- ZITATE ENTHALTEN IN DER BESCHREIBUNG
- Diese Liste der vom Anmelder aufgeführten Dokumente wurde automatisiert erzeugt und ist ausschließlich zur besseren Information des Lesers aufgenommen. Die Liste ist nicht Bestandteil der deutschen Patent- bzw. Gebrauchsmusteranmeldung. Das DPMA übernimmt keinerlei Haftung für etwaige Fehler oder Auslassungen.
- Zitierte Patentliteratur
-
- EP 3775764 B1 [0006]
Claims (7)
- Fahrzeugoberflächenanalysevorrichtung aufweisend eine Objektaufnahmeeinheit (1), eine Positionskameraeinheit (4) und eine Auswertungseinheit (7), wobei die Objektaufnahmeeinheit (1) mindestens eine Bildkamera (2) aufweist, die einen Bildkameraerfassungsbereich (2a) aufweist, zumindest abschnittsweise ein Fahrzeug (3) erfasst und zur Erfassung von primären Objektdaten von primären Objektpunkten des Fahrzeugs (3) zu einem ersten Zeitpunkt als eine erste Bildaufnahme und zu einem zweiten Zeitpunkt als eine zweite Bildaufnahme ausgebildet ist, wobei die Positionskameraeinheit (4) eine erste Positionskamera (5) und eine zweite Positionskamera (6) aufweist, wobei die erste Positionskamera (5) einen ersten Positionskameraerfassungsbereich (5a) aufweist, der zumindest abschnittsweise das Fahrzeug (3) erfasst, und zur Erfassung von sekundären Objektdaten von sekundären Objektpunkten des Fahrzeugs (3) zu einem ersten Zeitpunkt als eine erste Positionsaufnahme ausgebildet ist, und wobei die zweite Positionskamera (6) einen zweiten Positionskameraerfassungsbereich (6a) aufweist, der zumindest abschnittsweise das Fahrzeug (3) erfasst, und zur Erfassung von sekundären Objektdaten von sekundären Objektpunkten des Fahrzeugs (3) zu einem zweiten Zeitpunkt als eine zweite Positionsaufnahme ausgebildet ist, wobei die Objektaufnahmeeinheit (1) und die Positionskameraeinheit (4) zueinander in einer festen Lagebeziehung angeordnet und zu einer Relativbewegung zu dem Fahrzeug (3) ausgebildet sind, wobei die Bewegungsrichtung der Relativbewegung von den optischen Achsen der Positionskameras (5, 6) abweicht, und wobei die Auswertungseinheit (7) mit der Objektaufnahmeeinheit (1) und der Positionskameraeinheit (4) verbunden und ausgebildet ist, die erste Bildaufnahme und die erste Positionsaufnahme mit einem ersten Zeitstempel und die zweite Bildaufnahme und die zweite Positionsaufnahme mit einem zweiten Zeitstempel zu versehen, einen sekundären Objektpunkt des Fahrzeugs (3) anhand der ersten Positionsaufnahme zu identifizieren und diesem identifizierten sekundären Objektpunkt Koordinaten (x, y) zuzuordnen, den identifizierten sekundären Objektpunkt des Fahrzeugs (3) anhand der zweiten Positionsaufnahme zu erkennen und diesem sekundären Objektpunkt Koordinaten (x', y') zuzuordnen, mittels - der Zeitstempel, - eines Abstands zwischen dem ersten und dem zweiten Positionskameraerfassungsbereich - einer Winkelposition des identifizierten Objektspunkts in der ersten und zweiten Positionsaufnahme einen Positionsabstand zu bestimmen und anhand des Positionsabstands die primären Objektpunkte aus der ersten Bildaufnahme den primären Objektpunkten aus der zweiten Bildaufnahme zuzuordnen und anhand der zugeordneten primären Objektpunkte eine finale Bildaufnahme bereitzustellen.
- Fahrzeugoberflächenanalysevorrichtung nach
Anspruch 1 , dadurch gekennzeichnet, dass die Auswertungseinheit (7) ausgebildet ist, mittels - der Zeitstempel, - eines Abstands zwischen dem ersten und dem zweiten Positionskameraerfassungsbereich - einer Winkelposition des identifizierten Objektspunkts in der ersten und zweiten Positionsaufnahme eine Geschwindigkeit der Relativbewegung zu bestimmen und anhand der Geschwindigkeit der Relativbewegung und der Zeitstempel die primären Objektpunkte aus der ersten Bildaufnahme den primären Objektpunkten aus der zweiten Bildaufnahme zuzuordnen. - Fahrzeugoberflächenanalysevorrichtung nach
Anspruch 1 , dadurch gekennzeichnet, dass die optischen Achsen der Positionskameras parallel zueinander angeordnet sind. - Fahrzeugoberflächenanalysevorrichtung nach
Anspruch 1 und2 , dadurch gekennzeichnet, dass die optischen Achsen der Positionskameras (5, 6) und die optische Achse der Bildkamera (2) in einer Planebene quer zu der Relativbewegung des Fahrzeugs (3) angeordnet sind. - Fahrzeugoberflächenanalysevorrichtung nach einem der vorhergehenden Ansprüche, dadurch gekennzeichnet, dass die Objektaufnahmeeinheit (1) mindestens eine Einzelerfassungseinheit aus der Gruppe: - TOF-Kamera, - Infrarotkamera, - Lasertriangulationssystem, - Musterlichtsprojektionssystem, - Deflektometriesystem, - Reflektometriesystem, aufweist.
- Verfahren zur Fahrzeugoberflächenanalyse, mittels der Objektaufnahmeeinheit (1), der Positionskameraeinheit (4) und der Auswertungseinheit (7) nach einem der vorhergehenden Ansprüche, aufweisend folgende Verfahrensschritte: a) Erfassen von primären Objektdaten von primären Objektpunkten des Fahrzeugs (3) mittels der Bildkamera (2) zu einem ersten Zeitpunkt als eine erste Bildaufnahme und Übertragen an die Auswertungseinheit (7) und Erzeugen eines ersten Bildaufnahmezeitstempels, b) Erfassen von sekundären Objektdaten von sekundären Objektpunkten des Fahrzeugs (3) mittels der ersten Positionskamera (5) zu einem ersten Zeitpunkt als eine erste Positionsaufnahme und Übertragen an die Auswertungseinheit (7) und Erzeugen eines ersten Positionsaufnahmezeitstempels, c) Durchführen einer Relativbewegung des Fahrzeugs (3) zu der Objektaufnahmeeinheit (1) und der Positionskameraeinheit (4), d) Erfassen von primären Objektdaten von primären Objektpunkten des Fahrzeugs (3) mittels der Bildkamera (2) zu einem zweiten Zeitpunkt als eine zweite Bildaufnahme und Übertragen an die Auswertungseinheit (7) und Erzeugen eines zweiten Bildaufnahmezeitstempels, e) Erfassen von sekundären Objektdaten von sekundären Objektpunkten des Fahrzeugs (3) mittels der zweiten Positionskamera zu einem zweiten Zeitpunkt als eine zweite Positionsaufnahme und Übertragen an die Auswertungseinheit (7) und Erzeugen eines zweiten Positionsaufnahmezeitstempels, f) Identifizieren eines sekundären Objektpunkts des Fahrzeugs (3) anhand der ersten Positionsaufnahme und Zuordnen von Koordinatendaten (x, y), g) Erkennen des identifizierten sekundären Objektpunkts anhand der zweiten Positionsaufnahme und Zuordnen von Koordinatendaten (x', y,'), h) Bestimmen eines Positionsabstands mittels - der Koordinatendaten des sekundären Objektpunkts x, y und x', y', - eines Abstands zwischen dem ersten und dem zweiten Positionskameraerfassungsbereich und - einer Winkelposition des identifizierten Objektspunkts in der ersten und zweiten Positionsaufnahme, i) Durchführen einer Zuordnung von den primären Objektpunkten aus der ersten Bildaufnahme zu den primären Objektpunkten aus der zweiten Bildaufnahme anhand des Positionsabstand, j) Erzeugen einer finalen Bildaufnahme mittels der primären Objektpunkte aus der ersten und aus der zweiten Bildaufnahme.
- Verfahren zur Fahrzeugoberflächenanalyse nach
Anspruch 5 , dadurch gekennzeichnet, dass dieses folgende weitere Verfahrensschritte aufweist: d1) Erfassen von primären Objektdaten von primären Objektpunkten des Fahrzeugs (3) mittels der Bildkamera (2) zu einem weiteren Zeitpunkt als eine weitere Bildaufnahme und Übertragen an die Auswertungseinheit (7) und Erzeugen eines weiteren Bildaufnahmezeitstempels, h1) Bestimmen einer Geschwindigkeit der Relativbewegung mittels - der Koordinatendaten des sekundären Objektpunkts x, y und x', y', - der Zeitstempel, - des Abstands zwischen dem ersten und dem zweiten Positionskameraerfassungsbereich und - der Winkelposition des identifizierten Objektspunkts in der ersten und zweiten Positionsaufnahme, h2)- Bestimmen eines weiteren Positionsabstands mittels - der Geschwindigkeit der Relativbewegung - des weiteren Bildaufnahmezeitstempels i1) Durchführen einer Zuordnung von den primären Objektpunkten aus der weiteren Bildaufnahme zu den primären Objektpunkten aus der ersten und zweiten Bildaufnahme, - und dass im Verfahrensschritt j) das Erzeugen der finalen Bildaufnahme mittels der primären Objektpunkte aus der ersten, der zweiten und der weiteren Bildaufnahme durchgeführt wird.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102022001772.5A DE102022001772A1 (de) | 2022-05-19 | 2022-05-19 | Fahrzeugoberflächenanalysevorrichtung und Verfahren zur Fahrzeugoberflächenanalyse |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102022001772.5A DE102022001772A1 (de) | 2022-05-19 | 2022-05-19 | Fahrzeugoberflächenanalysevorrichtung und Verfahren zur Fahrzeugoberflächenanalyse |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| DE102022001772A1 true DE102022001772A1 (de) | 2023-11-23 |
Family
ID=88599449
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| DE102022001772.5A Pending DE102022001772A1 (de) | 2022-05-19 | 2022-05-19 | Fahrzeugoberflächenanalysevorrichtung und Verfahren zur Fahrzeugoberflächenanalyse |
Country Status (1)
| Country | Link |
|---|---|
| DE (1) | DE102022001772A1 (de) |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001357488A (ja) | 2000-06-13 | 2001-12-26 | Mitsubishi Heavy Ind Ltd | 車両寸法計測装置 |
| DE102016107272A1 (de) | 2016-04-20 | 2017-10-26 | Beckhoff Automation Gmbh | Konzept zum Prüfen eines Objekts |
| DE102020203232A1 (de) | 2019-03-18 | 2020-09-24 | Keyence Corporation | Bildmessvorrichtung |
| EP3775764B1 (de) | 2018-03-29 | 2022-03-09 | Twinner GmbH | Fahrzeugerfassungssystem |
-
2022
- 2022-05-19 DE DE102022001772.5A patent/DE102022001772A1/de active Pending
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001357488A (ja) | 2000-06-13 | 2001-12-26 | Mitsubishi Heavy Ind Ltd | 車両寸法計測装置 |
| DE102016107272A1 (de) | 2016-04-20 | 2017-10-26 | Beckhoff Automation Gmbh | Konzept zum Prüfen eines Objekts |
| EP3775764B1 (de) | 2018-03-29 | 2022-03-09 | Twinner GmbH | Fahrzeugerfassungssystem |
| DE102020203232A1 (de) | 2019-03-18 | 2020-09-24 | Keyence Corporation | Bildmessvorrichtung |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3479058B1 (de) | Verfahren und vorrichtung zur vermessung von karosserieschäden | |
| DE10029423B4 (de) | Objekterkennungssystem | |
| DE102009013667A1 (de) | Verfahren zur Herstellung einer bekannnten festen räumlichen Beziehung zwischen einem Laserscanner und einer Digitalkamera zur Verkehrsüberwachung | |
| WO2022122196A1 (de) | Optische schienenwegerkennung | |
| DE102012023030A1 (de) | Verfahren zur Ermittlung der Bewegung eines Kraftfahrzeugs | |
| DE102005034597A1 (de) | Verfahren und Anordnung zur Erzeugung einer Tiefenkarte | |
| DE102018123393A1 (de) | Erkennung von Parkflächen | |
| DE102012023060A1 (de) | Verfahren zum Detektieren eines beweglichen Objekts mithilfe eines Histogramms anhand von Bildern einer Kamera und Kamerasystem für ein Kraftfahrzeug | |
| DE102011082477A1 (de) | Verfahren und System zur Erstellung einer digitalen Abbildung eines Fahrzeugumfeldes | |
| DE102012005966B4 (de) | Vorrichtung und Verfahren zur Erzeugung einer flächenhaften Darstellung eines dreidimensionalen Körpers sowie Beleuchtungseinrichtung dazu | |
| DE102010042821A1 (de) | Verfahren und Vorrichtung zur Bestimmung einer Basisbreite eines Stereo-Erfassungssystems | |
| DE102022001772A1 (de) | Fahrzeugoberflächenanalysevorrichtung und Verfahren zur Fahrzeugoberflächenanalyse | |
| DE202022001216U1 (de) | Fahrzeugoberflächenanalysevorrichtung | |
| DE102017117594A1 (de) | Automatisierte Erkennung einer Scheinwerferfehlstellung | |
| DE102010029627B4 (de) | Vorrichtung und Verfahren zur Bestimmung der Struktur einer spiegelnden Oberfläche eines Objekts | |
| DE102019127322A1 (de) | Verfahren zur Erfassung von Objekten in einer Fahrzeugumgebung, Vorrichtung zur Datenverarbeitung, Computerprogrammprodukt und computerlesbarer Datenträger | |
| DE102018222526A1 (de) | Verfahren und Steuergerät zur Detektion eines Objekts | |
| EP4569371A1 (de) | Vorrichtung und verfahren zur vermessung dreidimensionaler virtueller bilder und objekte eines head-up-displays | |
| DE102018121158A1 (de) | Verfahren zum Erfassen von Bodenabtastpunkten und Fahrerunterstützungssystem, das dafür konfiguriert ist, ein derartiges Verfahren auszuführen | |
| DE102022001120A1 (de) | Kalibrierung und Justierung einer Kamera eines Fahrzeugs | |
| EP3594624B1 (de) | Verfahren zur wegstreckenmessung sowie system zur wegstreckenmessung | |
| DE102021202454A1 (de) | Umgebungsmodellierung basierend auf Kameradaten | |
| DE102021128624A1 (de) | Systeme und verfahren zum prüfen eines bauteils oder einer baugruppe | |
| DE102020117271A1 (de) | Verfahren und Vorrichtung zur Ermittlung von Objektdaten in Bezug auf ein Objekt | |
| DE102022002668A1 (de) | Fahrzeugoberflächenanalysevorrichtung und Verfahren zur Fahrzeugoberflächenanalyse |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| R163 | Identified publications notified | ||
| R081 | Change of applicant/patentee |
Owner name: AUTO1 GROUP SE, DE Free format text: FORMER OWNER: TWINNER GMBH, 06112 HALLE, DE |
|
| R082 | Change of representative |
Representative=s name: DR. WEIHRAUCH & HAUSSINGEN PATENT- UND RECHTSA, DE Representative=s name: WEIHRAUCH, FRANK, DR., DE |
|
| R082 | Change of representative |
Representative=s name: DR. WEIHRAUCH & HAUSSINGEN PATENT- UND RECHTSA, DE Representative=s name: WEIHRAUCH, FRANK, DR., DE |
|
| R082 | Change of representative |
Representative=s name: WEIHRAUCH, FRANK, DR., DE |