CN115530015A - Needle type brown mushroom thinning system based on regional ant colony path planning and application method - Google Patents
Needle type brown mushroom thinning system based on regional ant colony path planning and application method Download PDFInfo
- Publication number
- CN115530015A CN115530015A CN202211138481.3A CN202211138481A CN115530015A CN 115530015 A CN115530015 A CN 115530015A CN 202211138481 A CN202211138481 A CN 202211138481A CN 115530015 A CN115530015 A CN 115530015A
- Authority
- CN
- China
- Prior art keywords
- path
- needle
- brown
- brown mushroom
- mushroom
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images



Classifications
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01G—HORTICULTURE; CULTIVATION OF VEGETABLES, FLOWERS, RICE, FRUIT, VINES, HOPS OR SEAWEED; FORESTRY; WATERING
- A01G18/00—Cultivation of mushrooms
- A01G18/60—Cultivation rooms; Equipment therefor
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/16—Program controls
- B25J9/1656—Program controls characterised by programming, planning systems for manipulators
- B25J9/1664—Program controls characterised by programming, planning systems for manipulators characterised by motion, path, trajectory planning
Landscapes
- Life Sciences & Earth Sciences (AREA)
- Engineering & Computer Science (AREA)
- Mycology (AREA)
- Environmental Sciences (AREA)
- Robotics (AREA)
- Mechanical Engineering (AREA)
- Manipulator (AREA)
Abstract
The invention discloses a needle type brown mushroom thinning system based on regional ant colony path planning and an application method, wherein the advancement of a path planning algorithm of the thinning system is expressed in the following two aspects, firstly, the uneven distribution of initial pheromone values can enable a planned path to have the inspiration of advancing towards the direction of a target point, the time of path planning is reduced, and the convergence speed is greatly improved; secondly, an improved algorithm, namely improvement of a heuristic function and judgment of the sum of paths are utilized to realize quick approach to a target under guidance of the heuristic function and ensure optimal planning paths; the picking of the brown mushrooms at a relatively short distance can be realized by utilizing the tail ends of the needle-shaped manipulators, the damage to the brown mushrooms can be reduced to a great extent, and the needle-shaped manipulator picking machine has a wider application space; the manipulator is controlled by the ball gear to realize multi-angle adjustment, and the function of picking up the brown mushrooms inclined in the growth pose by puncturing the center can be realized.
Description
Technical Field
The invention relates to the technical field of agricultural harvesting machinery, in particular to a needle type brown mushroom thinning system based on regional ant colony path planning and an application method.
Background
With the increasing development of machine vision, various automated machines based on machine vision are found in many industries. Such as agriculture, industry, etc., are widely used. Due to the fact that urbanization is rapidly developed recently, the yield of the brown mushrooms is greatly improved along with the application of a brown mushroom large-scale aseptic workshop in recent years. The brown mushroom has higher and higher nutritional value and medicinal value, so the demand is more and more. Position information and posture information of the brown mushrooms in a workshop can be obtained based on machine vision, so that matched systems and methods are needed to pick the brown mushrooms with known posture information, and the thinning stage in the brown mushroom growth cycle is realized.
Therefore, the thinning system and method need to solve the following problems:
(1) The tail end of a manipulator of the thinning system and the thinning method needs to adapt to the growth environment of a brown mushroom workshop, namely, when picking target brown mushrooms, the normal growth of other brown mushrooms cannot be interfered or damaged, and in addition, the picked brown mushrooms are also reduced to the greatest extent so as to be used for other purposes;
(2) When the thinning system obtains the pose information of a plurality of target brown mushrooms to be picked simultaneously, a proper path planning method is needed to realize the picking process with the minimum path or the minimum time, so that the working efficiency of the thinning system is improved;
the growing postures of the brown mushrooms on the mushroom beds are different, so the thinning system and the thinning method are required to adapt to the corresponding position postures, wherein the position postures of the brown mushrooms comprise: the plane coordinate information of the brown mushroom on the mushroom bed, the vertical coordinate information on the space, the deflection direction of the brown mushroom and the deflection angle.
In 2019, ruwei et al, the university of Nanjing agriculture, proposed a mushroom picking robot (grant No. CN 110073904B) suitable for multi-layer mushroom bed operation, wherein a lifting platform, a telescopic guide rail telescopic platform and a picking mechanical arm are used for meeting the requirement of multi-layer parallel arrangement factory-like brown mushroom planting, and the picking mechanical arm can be contracted up and down in a transmission function.
Brown mushroom is a mushroom in biology, and particularly, brown mushroom is similar to most mushrooms in shape in addition to having a strong degree of distinction in color, so that since there are few patents for brown mushroom-targeted thinning apparatuses and manipulators, we can refer to related patents for mushrooms.
In 2019, nanjing aerospace university Shikoamine et al propose a mushroom automatic picking system and method based on machine vision (No. CN 107046933B), wherein automation of picking seedbed brown mushrooms is realized by utilizing an air bag type manipulator and processing images of mushrooms with complex backgrounds and adhesion, but the tail ends of the air bag type manipulator can not pick brown mushrooms with serious adhesion or mutual shielding, or other brown mushrooms with normal growth can be influenced during picking.
In 2020, qijiangtao et al of Jilin university propose a damage-proof bionic manipulator (CN 111543258B) for picking mushrooms, wherein the adjustment of the position and the posture of a sucking disc is realized by the cooperation of a front-back moving component, an upper component, a lower component, a left component, a right component, a posture adjusting component and the like, the damage-proof picking of mushrooms is realized through a bionic flexible sucking disc, but the posture adjusting component can only adjust the angle in a single direction and cannot be suitable for various deflection angles of mushrooms; the bionic disc used by the manipulator is too single in size, common picking of mushrooms in multiple sizes cannot be achieved, and in addition, mushrooms which do not need to be picked can be mistakenly collided during picking of the bionic disc, so that normal growth of the mushrooms is affected.
In 2021, wanglihui et al, university in southeast, designed a method for planning the operation path of a harvesting robot based on an improved ant colony algorithm (grant notice No.: CN 113190017B). The path planning method adjusts the length of a path based on a weight factor, and influences the optimizing process of the ant colony algorithm by changing the length of the path and changing the content of pheromones, but the path planning is influenced by a traditional cost function and real-time grain weight, so that the non-convergence phenomenon of the path planning can be caused, and a better path is difficult to select.
When the traditional ant colony algorithm is used for solving the path planning problem, the initial pheromone value in the early stage is a fixed value, so that the problem of round-trip search can be caused during path planning, global information is ignored, and the efficiency of path search time is too low or the path length is increased. On the other hand, the traditional ant colony algorithm performs heuristic search according to the distance between adjacent targets, which results in an unobvious numerical difference between the targets. The traditional ant colony algorithm carries out heuristic search according to the distance between the grids, and the search mode causes the unobvious numerical difference between the grids, thereby resulting in the delay and blindness of path planning.
In conclusion: the related patents which take brown mushroom and mushroom as objects are summarized by analysis, and the advantages and the disadvantages of the patents are summarized. In order to realize the thinning of the brown mushrooms in a workshop, a thinning system and a thinning method are required to be designed, on one hand, the tail ends of the robots can realize the movement and picking of multiple degrees of freedom under the condition that the pose information of the target brown mushrooms is known, and meanwhile, the growth of the brown mushrooms nearby can not be influenced, and the picked target brown mushrooms can not be damaged; on one hand, the thinning system needs a proper path planning method to complete thinning operation by a better path, and the working efficiency of the thinning system is improved.
Disclosure of Invention
The invention aims to overcome the defects of the prior art, and provides a needle-type brown mushroom thinning system based on regional ant colony path planning and an application method thereof, which can realize multi-degree-of-freedom movement and picking without influencing the growth of nearby brown mushrooms and damaging the picked target brown mushrooms; the thinning operation is completed by a better path, and the working efficiency of the thinning system is improved.
The object of the invention is achieved on the one hand by: a needle type brown mushroom thinning system based on regional ant colony path planning comprises a binocular camera, an LED lamp, a needle-shaped manipulator tail end, a transmission device, a brown mushroom seedbed, a storage car hopper and a control system;
the control system is used for planning a path by using an improved ant colony algorithm by taking the brown mushroom coordinates of a brown mushroom seedbed and the coordinates of a storage hopper closest to the brown mushroom as nodes after obtaining brown mushroom coordinate information to be picked, obtaining a path with the shortest convergence time and the optimal distance and controlling the motion of the transmission device;
the binocular camera is electrically connected with the control system and used for processing and analyzing the current brown mushroom seedbed to obtain brown mushroom pose information needing thinning picking, including coordinate information in XYZ directions and deflection angles and directions, and feeding back the brown mushroom pose information to the control system;
the LED lamp is fixedly connected to the Z-axis transmission of the transmission device and used for supplementing a light source to the binocular camera;
the transmission device is hinged to the brown mushroom seedbed and used for moving in the XYZ direction according to a path planned by the control system, and when the brown mushroom coordinate needing to be picked is reached, the transmission device starts to transmit in the Z-axis direction.
The tail end of the needle-shaped manipulator is in transmission connection with a Z shaft of the transmission device and is used for controlling the deflection angle by utilizing the needle-shaped manipulator controlled by the ball gear, picking of the target brown mushrooms is realized, and the brown mushrooms are conveyed to the storage car hopper;
the storage car hopper is arranged on the left side of the brown mushroom seedbed and used for storing the picked brown mushrooms.
As a further limitation of the present invention, the performing path planning by using the improved ant colony algorithm to obtain a path with the shortest convergence time and the optimal distance specifically includes: connecting the known initial point and the farthest brown mushroom target point, and dividing a rectangular areaA field and increasing the initial pheromone value of the field; using improvement A * The algorithm realizes rapid optimal path planning by an improved heuristic function and an added path optimal function; after the path pheromone distribution is finished, the optimal path is searched through the ant colony, when all ant colonies release and update pheromones on the path, different numbers of pheromones are left among all nodes, the pheromones on all paths need to be analyzed and integrated, and the number of the pheromones contained among the nodes is in a reverse relation with the distance of the path; sorting the pheromone contents on all the paths, enabling the corresponding paths to be sorted in a descending manner according to the number of the pheromones, finally selecting the paths corresponding to the first three ranked pheromone contents as an optimal path, and finally selecting the optimal path which is the whole movement path of the tail end of the needle-shaped robot of the thinning system.
As a further limitation of the present invention, the needle robot tip comprises: the device comprises a driving ball gear, a driven ball gear, a control motor, an anti-collision needle mechanism and a needle-shaped tail end in two directions; the control motor is fixedly connected to the Z-axis transmission of the transmission device and is connected with the driving spherical gear through a coupler; the driven spherical gear is meshed with the driving spherical gear and is controlled by control motors of the driving spherical gears in two different directions; the anti-collision needle mechanism is fixedly connected with the driven ball gear and rotates in the same direction with the driven ball gear; the needle-shaped tail end is nested in the anti-striker mechanism and fixedly connected with the spring.
As a further limitation of the present invention, the anti-collision needle mechanism includes a stress sensor and a spring; stress sensor sets up in the inside top of anticollision needle mechanism, the terminal one end of needle-like and the spring rigid coupling in the anticollision needle mechanism, the other one end periphery has the arch, prevents to puncture back fungus mushroom to drop.
As a further limitation of the present invention, the binocular camera and the LED lamp are distributed at both sides of the end of the needle robot.
The object of the invention is achieved in another aspect by: an application method of a needle type brown mushroom thinning system based on regional ant colony path planning comprises the following steps:
1) Firstly, processing and analyzing a current brown mushroom seedbed by using a binocular camera to obtain brown mushroom pose information needing thinning-out picking, wherein the pose information comprises coordinate information in XYZ directions and deflection angles and directions, and the coordinate information and the deflection angles and directions are fed back to a control system of a thinning-out device;
2) Carrying out path planning by utilizing an improved ant colony algorithm, and planning a path with less convergence time and an optimal path for controlling the motion of a transmission system;
3) Picking the target brown mushroom according to a planned path, and controlling the rotation of two driving ball gears of a motor when the tail end of a needle-shaped robot hand moves to the XY coordinate of the brown mushroom so as to control the deflection direction of the needle-shaped tail end; after the deflection direction is matched with the direction of the target brown mushroom, starting to move in the Z direction, and picking the target brown mushroom;
4) And placing the picked brown mushrooms in a storage car hopper, picking the next brown mushroom until all target brown mushrooms are picked and stored, and returning the transmission device to the original point to finish the thinning task.
As a further limitation of the present invention, the planning a path by using the improved ant colony algorithm in step 2) to plan a path with less convergence time and an optimal route specifically includes: connecting the known initial point and the farthest brown mushroom target point, dividing a rectangular area, and increasing the initial pheromone value of the area; using improvement A * The algorithm realizes rapid optimal path planning by an improved heuristic function and an increased path optimal function; after the distribution of the path pheromone is finished, searching an optimal path through the ant colony;
as a further limitation of the invention, said improvement A * The heuristic function of the algorithm is:
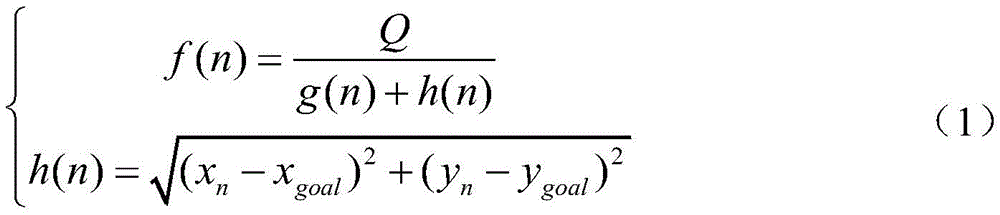
where f (n) represents the weight of the heuristic function, g (n) represents the actual cost of arriving at node n from the target point, which represents the difference between the actual predicted value and the estimated value, and the actual value is used in the path planningThe cost g (n) is known; h (n) represents the predicted cost from the n nodes to the target point, which can be predicted using Euclidean distance, where x n 、y n Is a coordinate value of node n, x goal 、y goal The coordinate value of the target node; q is a constant greater than 1.
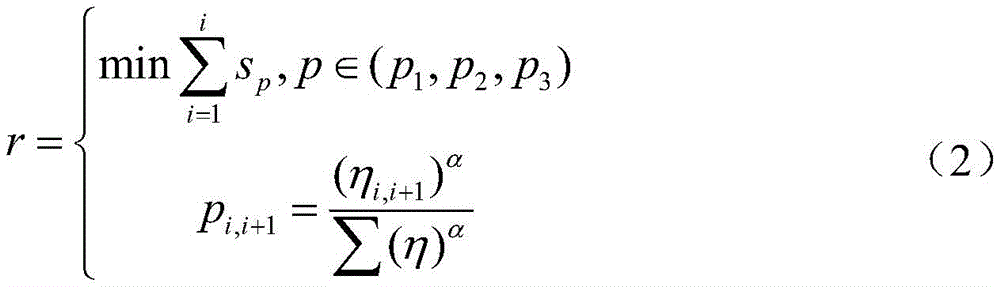
As a further limitation of the present invention, the finding an optimal path through the ant colony after the path pheromone distribution is finished specifically includes: after all ant groups release and update pheromones on the paths, different numbers of pheromones are left among all nodes, the pheromones on all the paths need to be analyzed and integrated, and the number of the pheromones contained among the nodes is in a reverse relation with the distance of the path; sequencing the path selection probabilities among all the nodes, and sequencing the path selection probabilities in a descending way, wherein:

wherein r is the final selected path, i is the total node path, p is the probability of selecting the node path, η is the pheromone content, p 1 ,p 2 ,p 3 Selecting probability, s, for the first three ordered paths p The node paths corresponding to different path probabilities, wherein alpha is the importance degree of the pheromone; the final path selected is the entire path of movement of the needle manipulator portion of the thinning system.
By adopting the technical scheme, compared with the prior art, the invention has the beneficial effects that: 1) The thinning system utilizes the tail end of the needle-shaped manipulator controlled by the ball gear, and is anti-collision and anti-falling to pick the brown mushrooms, on one hand, the tail end of the needle-shaped manipulator can be utilized to pick the brown mushrooms at a relatively short distance, the damage to the brown mushrooms can be reduced to a great extent, and the thinning system has a wider application space compared with a common claw-shaped manipulator; on the other hand, the ball gear is used for controlling the mechanical arm to realize multi-angle adjustment, and the brown mushrooms with inclined growth postures can be punctured from the center to realize the picking function;
2) Global path planning is achieved by using an improved ant colony algorithm, and on one hand, the paths are not evenly dividedThe initial pheromone value distribution can enable the planned path to have the inspiration of advancing towards the direction of a target point, reduce the time of path planning and greatly improve the convergence speed; on the other hand, with improvement A * The algorithm is the improvement of the heuristic function and the judgment of the total path, so that the optimal planned path can be ensured while the target is quickly approached under the guidance of the heuristic function.
Drawings
FIG. 1 is a schematic overall view of the thinning system of the present invention.
FIG. 2 is a schematic view of the end of the needle robot of the overall thinning system of the present invention.
Fig. 3 is a schematic view of the anti-collision needle mechanism at the end of the needle robot according to the present invention.
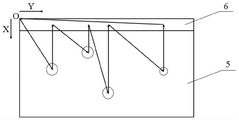
Fig. 4 is a schematic diagram of the area ant colony path planning according to the present invention.
Wherein, 1 binocular camera, 2LED lamp, 3 needle manipulator end, 4 transmission, 5 brown mushroom seedbeds, 6 storage car hoppers, 7 control system, 31 driven gear of seeking, 32 initiative ball gear, 33 control motor, 34 anticollision needle mechanism, 35 needle-like end, 341 stress sensor, 342 spring.
Detailed Description
As shown in fig. 1, the needle-type brown mushroom thinning system based on regional ant colony path planning comprises a binocular camera 1, an LED lamp 2, a needle-shaped manipulator end 3, a transmission device 4, a brown mushroom seedbed 5, a storage car hopper 6 and a control system 7; the binocular camera 1 and the LED lamps 2 are distributed on two sides of the tail end 3 of the needle-shaped manipulator; the LED lamp 2 is fixedly connected to the Z-axis transmission of the transmission device 4 and used for supplementing a light source to the binocular camera 1; the storage car hopper 6 is arranged at the left side of the brown mushroom seedbed 5 and is used for storing the picked brown mushrooms.
The control system 7 is used for planning a path by using an improved ant colony algorithm by taking the brown mushroom coordinates of the brown mushroom seedbed 5 and the coordinates of the storage hopper 6 closest to the brown mushroom as nodes after obtaining brown mushroom coordinate information to be picked, obtaining a path with the shortest convergence time and the optimal distance, and controlling the motion of the transmission device 4;
the binocular camera 1 is electrically connected with the control system 7 and used for processing and analyzing the current brown mushroom seedbed 5 to obtain brown mushroom pose information needing thinning picking, including coordinate information in the XYZ direction and deflection angle and direction, and feeding back the brown mushroom pose information to the control system;
the transmission device 4 is hinged to the brown mushroom seedbed 5 and used for moving in the XYZ direction according to a path planned by the control system, and when the coordinate of brown mushroom to be picked is reached, the transmission device 4 starts to transmit in the Z-axis direction;
the tail end 3 of the needle-shaped manipulator is in transmission connection with a Z shaft of a transmission device 4 and is used for controlling the deflection angle by utilizing the needle-shaped manipulator controlled by a ball gear, picking of the target brown mushrooms is achieved, and the brown mushrooms are conveyed to a storage car hopper.
As shown in fig. 2, the needle robot tip 3 includes: a driving ball gear 32, a driven ball gear 31, a control motor 33, an anti-collision needle mechanism 34 and a needle-shaped tail end 35 in two directions; the control motor 33 is fixedly connected to the Z-axis transmission of the transmission device 4, and the control motor 33 is connected with the driving spherical gear 32 through a coupler; the driven ball gear 31 is meshed with the driving ball gear 32 and is controlled by control motors 33 of the driving ball gears 32 in two different directions; the striker prevention mechanism 34 is fixedly connected with the driven ball gear 31 and rotates in the same direction as the driven ball gear 31; the needle-shaped end 35 is nested in the anti-collision needle mechanism 34 and fixedly connected with the spring 342, and can be forced to slide up and down.
The driving spherical gears 32 and the driven spherical gears 31 in two directions are meshed and matched with each other, the rotation of the driven spherical gears 31 is controlled together, the driving spherical gears 32 are controlled by the control motors 33, the rotation in the two directions can be realized, the different rotating speeds of the two motors are controlled due to the working property of the spherical gears, the rotation of the driven spherical gears 31 meshed with the driving spherical gears can be realized within a certain space angle range, the needle-shaped tail ends 35 are fixedly connected to the driven spherical gears 31, the rotation of the spherical gear mechanism can be controlled through the motors, the pointing direction of the output ends, namely the needle-shaped tail ends 35, and the picking of the brown mushrooms in different poses can be realized.
As shown in fig. 3, the anti-collision needle mechanism 34 includes a stress sensor 341 and a spring 342; the stress sensor 341 is arranged above the inside of the anti-collision needle mechanism 34, one end of the needle-shaped tail end 35 is fixedly connected with the spring 342 in the anti-collision needle mechanism 34, when the needle-shaped tail end 35 picks a rigid object which is wrongly identified, the spring 342 is stressed and compressed, and when the spring force is overlarge, the stress sensor 341 can send out a picking termination command to prevent the needle-shaped tail end 35 from being damaged due to the mistake of visual detection. The other end of the needle-shaped tail end 35 is provided with a bulge in a circumferential ring manner, so that the mushroom is prevented from falling off after puncture.
As shown in fig. 4, after the control system 7 acquires the coordinate information of the brown mushrooms to be picked, taking the brown mushroom coordinates of the brown mushroom seedbed 5 and the coordinates of the storage car hopper 6 closest to the brown mushrooms as nodes, performing path planning by using an improved ant colony algorithm to obtain a path with the shortest convergence time and the optimal distance, starting from an original point and performing transmission by using the planned path as shown in fig. 4, when the brown mushroom coordinates to be picked are reached, starting transmission in the Z-axis direction by using the transmission device 4, controlling the deflection angle by using a needle-shaped manipulator controlled by a ball gear, picking the target brown mushrooms, transmitting the target brown mushrooms to the storage car hopper 6, picking the brown mushrooms in the next step, finally completing a thinning task, and returning to the original point.
An application method of a needle type brown mushroom thinning system based on regional ant colony path planning comprises the following steps:
1) Firstly, processing and analyzing a current brown mushroom seedbed by using a binocular camera to obtain brown mushroom pose information needing thinning-out picking, wherein the pose information comprises coordinate information in XYZ directions and deflection angles and directions, and the coordinate information and the deflection angles and directions are fed back to a control system of a thinning-out device;
2) Carrying out path planning by utilizing an improved ant colony algorithm, and planning a path with less convergence time and an optimal path for controlling the motion of a transmission system;
the method for planning the path by using the improved ant colony algorithm comprises the following steps of: connecting the known initial point and the farthest brown mushroom target point, dividing a rectangular area, and increasing the initial pheromone value of the area; therefore, the ant can avoid blind search of the path, and the ant can have a more accurate target to plan the path.
The improved algorithm is utilized to realize the quick approach to the target under the guidance of the heuristic function and ensure the planningAnd (4) optimizing the path. Improvement A * The algorithm realizes rapid optimal path planning by an improved heuristic function and an increased path optimal function;
the improvement A * The heuristic function of the algorithm is:

wherein f (n) represents the weight value of the heuristic function, g (n) represents the actual cost when the target point reaches the n nodes, namely the actual cost from the initial node to the node n, which represents the difference between the actual predicted value and the estimated value, and the actual cost g (n) is known in the path planning; h (n) represents the predicted cost from n nodes to the target point, which can be valued by Euclidean distance, where x n 、y n Is a coordinate value of node n, x goal 、y goal The coordinate value of the target node; q is a constant greater than 1.
Finding the optimal path through the ant colony after the path pheromone distribution is finished specifically comprises the following steps: when all ant groups release and update pheromones on paths, different numbers of pheromones are left among all nodes, the pheromones on all paths need to be analyzed and integrated, the number of the pheromones contained among the nodes is in a reverse relation with the distance of the path, the more the pheromones contained among the nodes are, the shorter the distance of the path is represented, the less the pheromones contained among the nodes are, the longer the distance of the path is represented, the path selection probabilities among all the nodes are sorted, and the path selection probabilities are sorted in descending order:

wherein r is the final selected path, i is the total node path, p is the probability of selecting the node path, η is the pheromone content, p 1 ,p 2 ,p 3 Selecting probability, s, for the first three ordered paths p The node paths corresponding to the different path probabilities,α is the importance of the pheromone; the final path selected is the entire path of movement of the needle manipulator portion of the thinning system.
3) Picking the target brown mushroom according to a planned path, and controlling the rotation of two driving ball gears of a motor when the tail end of a needle-shaped robot hand moves to the XY coordinate of the brown mushroom so as to control the deflection direction of the needle-shaped tail end; after the deflection direction is matched with the direction of the target brown mushroom, starting to move in the Z direction, and picking the target brown mushroom;
4) And placing the picked brown mushrooms in a storage car hopper, picking the next brown mushroom until all target brown mushrooms are picked and stored, and returning the transmission device to the original point to finish the thinning task.
The invention provides a needle type brown mushroom thinning system based on regional ant colony path planning and an application method, wherein brown mushrooms are picked by utilizing the tail end of a ball gear control, anti-collision and anti-falling needle-shaped mechanical arm, on one hand, the picking of brown mushrooms close to each other in a local region can be realized by utilizing the tail end of the needle-shaped mechanical arm, the damage to the brown mushrooms is reduced to a great extent, and the needle-shaped brown mushroom thinning system has a wider application space; on the other hand, the ball gear is used for controlling the mechanical arm to realize multi-angle adjustment, and the brown mushrooms with inclined growth postures can be punctured from the center to realize the picking function; the global path planning is realized by utilizing the regional ant colony path planning, on one hand, the unevenly distributed initial pheromone values can enable the planned path to have the heuristic property of advancing towards the direction of a target point, the path planning time is reduced, and the convergence speed is greatly improved; on the other hand, the improved algorithm, namely the improvement of the heuristic function and the judgment of the total path are utilized to realize that the optimal planned path can be ensured while the target is quickly approached under the guidance of the heuristic function, the thinning work of the brown mushrooms can be efficiently completed, and the method has great market prospect and popularization value.
The present invention is not limited to the above-mentioned embodiments, and based on the technical solutions disclosed in the present invention, those skilled in the art can make some substitutions and modifications to some technical features without creative efforts according to the disclosed technical contents, and these substitutions and modifications are all within the protection scope of the present invention.
Claims (9)
1. A needle type brown mushroom thinning system based on regional ant colony path planning is characterized by comprising a binocular camera, an LED lamp, a needle-shaped manipulator tail end, a transmission device, a brown mushroom seedbed, a storage car hopper and a control system;
the control system is used for planning a path by using an improved ant colony algorithm by taking the brown mushroom coordinates of a brown mushroom seedbed and the coordinates of a storage hopper closest to the brown mushroom as nodes after obtaining brown mushroom coordinate information to be picked, obtaining a path with the shortest convergence time and the optimal distance, and controlling the motion of the transmission device;
the binocular camera is electrically connected with the control system and used for processing and analyzing the current brown mushroom seedbed to obtain brown mushroom pose information needing thinning picking, including coordinate information in XYZ directions and deflection angles and directions, and feeding back the brown mushroom pose information to the control system;
the LED lamp is fixedly connected to the Z-axis transmission of the transmission device and used for supplementing a light source for the binocular camera;
the transmission device is hinged to the brown mushroom seedbed and used for moving in the XYZ direction according to a path planned by the control system, and when the brown mushroom coordinate needing to be picked is reached, the transmission device starts to transmit in the Z-axis direction;
the tail end of the needle-shaped manipulator is in transmission connection with a Z shaft of the transmission device and is used for controlling the deflection angle by utilizing the needle-shaped manipulator controlled by the ball gear, picking of the target brown mushrooms is realized, and the brown mushrooms are conveyed to the storage car hopper;
the storage car hopper is arranged on the left side of the brown mushroom seedbed and used for storing the picked brown mushrooms.
2. The area ant colony path planning-based needle-type brown mushroom thinning system according to claim 1, wherein the path planning using the improved ant colony algorithm specifically includes the following steps: connecting the known initial point and the farthest brown mushroom target point, dividing a rectangular area, and increasing the information of the areaAn initial prime value; using improvement A * The algorithm realizes rapid optimal path planning by an improved heuristic function and an increased path optimal function; after the path pheromone distribution is finished, the optimal path is searched through the ant colony, when all ant colonies release and update pheromones on the path, different numbers of pheromones are left among all nodes, the pheromones on all paths need to be analyzed and integrated, and the number of the pheromones contained among the nodes is in a reverse relation with the distance of the path; sorting the pheromone contents on all the paths, enabling the corresponding paths to be sorted in a descending manner according to the number of the pheromones, finally selecting the paths corresponding to the first three ranked pheromone contents as an optimal path, and finally selecting the optimal path which is the whole movement path of the tail end of the needle-shaped robot of the thinning system.
3. The needle-type brown mushroom thinning system based on regional ant colony path planning as claimed in claim 1, wherein the needle-like manipulator end comprises: the device comprises a driving ball gear, a driven ball gear, a control motor, an anti-collision needle mechanism and a needle-shaped tail end in two directions; the control motor is fixedly connected to the Z-axis transmission of the transmission device and is connected with the driving spherical gear through a coupler; the driven spherical gear is meshed with the driving spherical gear and is controlled by control motors of the driving spherical gears in two different directions; the anti-collision needle mechanism is fixedly connected with the driven ball gear and rotates in the same direction as the driven ball gear; the needle-shaped tail end is nested in the anti-firing pin mechanism and is fixedly connected with the spring.
4. The needle-type brown mushroom thinning system based on regional ant colony path planning of claim 1, wherein the striker prevention mechanism comprises a stress sensor and a spring; stress sensor sets up in the inside top of anticollision needle mechanism, the terminal one end of needle-like and the spring rigid coupling in the anticollision needle mechanism, the other end is encircled all around and is had the arch, prevents droing of fungus mushroom after the puncture.
5. The needle-type brown mushroom thinning system based on regional ant colony path planning of claim 1, wherein the binocular camera and the LED lamps are distributed on two sides of the end of the needle-type manipulator.
6. An application method of a needle type brown mushroom thinning system based on regional ant colony path planning is characterized by comprising the following steps:
1) Firstly, processing and analyzing a current brown mushroom seedbed by using a binocular camera to obtain brown mushroom pose information needing thinning-out picking, wherein the pose information comprises coordinate information in XYZ directions and deflection angles and directions, and the coordinate information and the deflection angles and directions are fed back to a control system of a thinning-out device;
2) Carrying out path planning by utilizing an improved ant colony algorithm, and planning a path with less convergence time and an optimal path for controlling the motion of a transmission system;
3) Picking the target brown mushroom according to a planned path, and controlling the rotation of two driving ball gears of a motor when the tail end of a needle-shaped robot hand moves to the XY coordinate of the brown mushroom so as to control the deflection direction of the needle-shaped tail end; after the deflection direction is matched with the direction of the target brown mushroom, starting to move in the Z direction, and picking the target brown mushroom;
4) And placing the picked brown mushrooms in a storage car hopper, picking the next brown mushroom until all target brown mushrooms are picked and stored, and returning the transmission device to the original point to finish the thinning task.
7. The method for applying a brown mushroom needle-type thinning system based on regional ant colony path planning as claimed in claim 6, wherein the step 2) of planning the path by using an improved ant colony algorithm to plan a path with less convergence time and an optimal route specifically comprises: connecting a known initial point and a farthest brown mushroom target point, dividing a rectangular area, and increasing an initial pheromone value of the area; using improvement A * The algorithm realizes rapid optimal path planning by an improved heuristic function and an increased path optimal function; and after the path pheromone distribution is finished, searching an optimal path through the ant colony.
8. The method of claim 7, wherein the improvement A is based on the application of a regional ant colony path planning needle-type brown mushroom thinning system * The heuristic function of the algorithm is:

wherein f (n) represents the weight value of the heuristic function, g (n) represents the actual cost when the target point reaches the n nodes, and represents the difference between the actual predicted value and the estimated value, and the actual cost g (n) is known in the path planning; h (n) represents the prediction cost from the n nodes to the target point, and the cost value is predicted by using Euclidean distance, wherein x n 、y n Is a coordinate value of node n, x goal 、y goal Coordinate values of the target node; q is a constant greater than 1.
9. The application method of the brown mushroom needle-type thinning system based on the regional ant colony path planning, according to claim 7, wherein the finding of the optimal path through the ant colony after the path pheromone distribution is finished specifically includes: when all ant groups release and update the pheromones of the paths, different numbers of pheromones are left among all nodes, the pheromones on all the paths need to be analyzed and integrated, and the number of the pheromones contained among the nodes is in a reverse relation with the distance of the path; sequencing the path selection probabilities among all the nodes, and sequencing the path selection probabilities in a descending way, wherein:
wherein r is the final selected path, i is the total node path, p is the probability of selecting the node path, η is the pheromone content, p 1 ,p 2 ,p 3 Selecting probability, s, for the top three ordered paths p Node paths corresponding to different path probabilities, alpha being pheromoneThe degree of importance of; the final path selected is the entire path of movement of the needle manipulator portion of the thinning system.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202211138481.3A CN115530015A (en) | 2022-09-19 | 2022-09-19 | Needle type brown mushroom thinning system based on regional ant colony path planning and application method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202211138481.3A CN115530015A (en) | 2022-09-19 | 2022-09-19 | Needle type brown mushroom thinning system based on regional ant colony path planning and application method |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN115530015A true CN115530015A (en) | 2022-12-30 |
Family
ID=84727342
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202211138481.3A Pending CN115530015A (en) | 2022-09-19 | 2022-09-19 | Needle type brown mushroom thinning system based on regional ant colony path planning and application method |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN115530015A (en) |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109870914A (en) * | 2019-03-14 | 2019-06-11 | 哈尔滨工程大学 | A self-defense control method of a mobile buoy under the disturbance of random waves |
| CN109974711A (en) * | 2019-04-12 | 2019-07-05 | 重庆渝博创智能装备研究院有限公司 | A kind of AGV multiple target point autonomous navigation method towards wisdom factory |
| CN110320930A (en) * | 2019-06-17 | 2019-10-11 | 中国工程物理研究院电子工程研究所 | The reliable transform method of multiple no-manned plane flight pattern based on Voronoi diagram |
| CN112238456A (en) * | 2020-10-10 | 2021-01-19 | 江西洪都航空工业集团有限责任公司 | Material sheet sorting path planning method based on ant colony algorithm |
| CN112650229A (en) * | 2020-12-15 | 2021-04-13 | 扬州大学 | Mobile robot path planning method based on improved ant colony algorithm |
| CN112925315A (en) * | 2021-01-25 | 2021-06-08 | 河海大学 | Crawler path planning method based on improved ant colony algorithm and A-star algorithm |
| CN114089760A (en) * | 2021-11-19 | 2022-02-25 | 合肥工业大学 | An AGV path planning method based on hybrid ant colony algorithm |
| CN216853286U (en) * | 2022-03-02 | 2022-07-01 | 扬州大学 | Anticollision needle-shaped manipulator device is picked to fungus mushroom based on ball gear |
-
2022
- 2022-09-19 CN CN202211138481.3A patent/CN115530015A/en active Pending
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109870914A (en) * | 2019-03-14 | 2019-06-11 | 哈尔滨工程大学 | A self-defense control method of a mobile buoy under the disturbance of random waves |
| CN109974711A (en) * | 2019-04-12 | 2019-07-05 | 重庆渝博创智能装备研究院有限公司 | A kind of AGV multiple target point autonomous navigation method towards wisdom factory |
| CN110320930A (en) * | 2019-06-17 | 2019-10-11 | 中国工程物理研究院电子工程研究所 | The reliable transform method of multiple no-manned plane flight pattern based on Voronoi diagram |
| CN112238456A (en) * | 2020-10-10 | 2021-01-19 | 江西洪都航空工业集团有限责任公司 | Material sheet sorting path planning method based on ant colony algorithm |
| CN112650229A (en) * | 2020-12-15 | 2021-04-13 | 扬州大学 | Mobile robot path planning method based on improved ant colony algorithm |
| CN112925315A (en) * | 2021-01-25 | 2021-06-08 | 河海大学 | Crawler path planning method based on improved ant colony algorithm and A-star algorithm |
| CN114089760A (en) * | 2021-11-19 | 2022-02-25 | 合肥工业大学 | An AGV path planning method based on hybrid ant colony algorithm |
| CN216853286U (en) * | 2022-03-02 | 2022-07-01 | 扬州大学 | Anticollision needle-shaped manipulator device is picked to fungus mushroom based on ball gear |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| Rong et al. | Fruit pose recognition and directional orderly grasping strategies for tomato harvesting robots | |
| Zhao et al. | Dual-arm robot design and testing for harvesting tomato in greenhouse | |
| CN109773788B (en) | Fruit and vegetable picking robot and control method thereof | |
| CN114679963B (en) | A cross-row double-arm cooperative strawberry harvesting robot, control system and picking method | |
| Reed et al. | AE—Automation and emerging technologies: Automatic mushroom harvester development | |
| US9475189B2 (en) | Multi-robot crop harvesting machine | |
| JP6738570B2 (en) | Distributed collaborative processing system | |
| CN109792888B (en) | Double-arm apple picking trapezoidal grading collection robot and its picking and grading operation method | |
| CN110089350A (en) | A kind of Mushroom Picking Robot system and picking method | |
| CN108811766A (en) | A kind of man-machine interactive fruits and vegetables of greenhouse harvesting robot system and its collecting method | |
| CN113911728A (en) | Electric toothbrush brush head dynamic feeding system and feeding method based on vision | |
| US11887880B2 (en) | Material handling robot | |
| CN106954426A (en) | A kind of robot based on close shot depth transducer approaches positioning picking method in real time | |
| CN107422700A (en) | A kind of control method of robot automation's production line experiment porch | |
| CN120056065A (en) | Double-arm picking robot system and control method | |
| CN107336240A (en) | A kind of bottom illuminated vision system of manipulator | |
| CN115530015A (en) | Needle type brown mushroom thinning system based on regional ant colony path planning and application method | |
| CN117242988A (en) | Wheeled ridge-riding strawberry picking robot | |
| Zhang et al. | Design and experimental study of ridge-grown strawberry automatic harvesting robot | |
| Zhao et al. | Research on design and experiment of rear-drive apple harvesting robotic arm based on obstacle avoidance posture conditions | |
| CN106233937A (en) | A kind of array extension type mechanical arm kiwifruit fruit picking robot | |
| JP7152351B2 (en) | Harvesting method and fruit and vegetable harvesting device | |
| CN120476846A (en) | Multi-arm picking robot based on YOLOv identification algorithm and fruit identification method | |
| CN108296183A (en) | Water pipe head labeling production line | |
| Au et al. | The monash apple retrieving system |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| RJ01 | Rejection of invention patent application after publication |
Application publication date: 20221230 |
|
| RJ01 | Rejection of invention patent application after publication |