CN114312491B - Hydrogen fuel cell electric energy output control method and system for new energy automobile - Google Patents
Hydrogen fuel cell electric energy output control method and system for new energy automobile Download PDFInfo
- Publication number
- CN114312491B CN114312491B CN202210049459.5A CN202210049459A CN114312491B CN 114312491 B CN114312491 B CN 114312491B CN 202210049459 A CN202210049459 A CN 202210049459A CN 114312491 B CN114312491 B CN 114312491B
- Authority
- CN
- China
- Prior art keywords
- new energy
- energy automobile
- distance
- automobile
- hydrogen fuel
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- UFHFLCQGNIYNRP-UHFFFAOYSA-N Hydrogen Chemical compound [H][H] UFHFLCQGNIYNRP-UHFFFAOYSA-N 0.000 title claims abstract description 138
- 239000001257 hydrogen Substances 0.000 title claims abstract description 138
- 229910052739 hydrogen Inorganic materials 0.000 title claims abstract description 138
- 239000000446 fuel Substances 0.000 title claims abstract description 130
- 238000000034 method Methods 0.000 title claims abstract description 59
- 230000001133 acceleration Effects 0.000 claims description 18
- 238000005259 measurement Methods 0.000 claims description 14
- 230000005484 gravity Effects 0.000 claims description 9
- 239000007789 gas Substances 0.000 claims description 3
- 230000009286 beneficial effect Effects 0.000 description 8
- 230000005611 electricity Effects 0.000 description 3
- 238000012986 modification Methods 0.000 description 3
- 230000004048 modification Effects 0.000 description 3
- WHXSMMKQMYFTQS-UHFFFAOYSA-N Lithium Chemical compound [Li] WHXSMMKQMYFTQS-UHFFFAOYSA-N 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 229910052744 lithium Inorganic materials 0.000 description 2
- 238000006243 chemical reaction Methods 0.000 description 1
- 230000007547 defect Effects 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 230000007613 environmental effect Effects 0.000 description 1
- 238000005457 optimization Methods 0.000 description 1
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 1
Images

Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T90/00—Enabling technologies or technologies with a potential or indirect contribution to GHG emissions mitigation
- Y02T90/40—Application of hydrogen technology to transportation, e.g. using fuel cells
Landscapes
- Fuel Cell (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
Abstract
本发明提供了用于新能源汽车的氢燃料电池电能输出控制方法和系统,其通过拍摄和分析汽车行驶过程的外部环境影像,确定当前行驶的路段是否为交通拥堵路段;当汽车当前行驶在交通拥堵路段时,根据汽车与其前方汽车之间的距离和前方汽车的行驶速度,确定汽车自身最高允许行驶速度,以此调整汽车的氢燃料电池电能输出量;最后根据汽车的实际负重信息,确定其可行驶距离,从而对适应性提示司机对汽车进行加气,其通过对新能源汽车的实际行驶环境和实际负重信息,调整内部氢燃料电池的串联状态以使氢燃料电池能够适应性地输出不同电量,这样能够优化氢燃料电池的电能输出效率和提升新能源汽车的行驶里程。
The present invention provides a hydrogen fuel cell power output control method and system for new energy vehicles, which can determine whether the current road section is a traffic jam road section by taking and analyzing the external environment image of the car driving process; When the road is congested, according to the distance between the car and the car in front and the speed of the car in front, determine the maximum allowable speed of the car itself, so as to adjust the output of the car's hydrogen fuel cell power; finally, according to the actual load information of the car, determine its The distance that can be traveled, so as to remind the driver to refuel the car adaptively. It adjusts the series state of the internal hydrogen fuel cell through the actual driving environment and actual load information of the new energy vehicle, so that the hydrogen fuel cell can output different output adaptively. This can optimize the power output efficiency of hydrogen fuel cells and increase the mileage of new energy vehicles.
Description
技术领域technical field
本发明涉及新能源电池的技术领域,特别涉及用于新能源汽车的氢燃料电池电能输出控制方法和系统。The invention relates to the technical field of new energy batteries, in particular to a hydrogen fuel cell power output control method and system for new energy vehicles.
背景技术Background technique
新能源汽车由于其环保的特点已经受到越来越高的重视,现有市场上的新能源汽车主要包括锂电池汽车和氢燃料电池汽车,前者是利用锂电池作为动力源来驱动电动机运转,后者则是利用氢燃料电池作为动力源来驱动电动机运转。氢燃料电池是通过氢气反应来生成电能,其需要对电池内部加入氢气,并且氢燃料电池的产生为水,这对于环境的污染较低,因此氢燃料电池汽车成为新能源汽车的一个重点发展方向。氢燃料电池汽车在行驶过程中如何根据汽车的实际行驶状态来调整氢燃料电池的电能输出显得尤为重要,这直接关系到优化氢燃料电池的电能输出效率和新能源汽车行驶里程的提升。New energy vehicles have received more and more attention due to their environmental protection characteristics. The new energy vehicles on the existing market mainly include lithium battery vehicles and hydrogen fuel cell vehicles. The former uses lithium batteries as a power source to drive the electric motor, while the latter The other uses hydrogen fuel cells as a power source to drive electric motors. Hydrogen fuel cells generate electricity through hydrogen reactions, which require hydrogen to be added to the battery, and hydrogen fuel cells are produced as water, which has low pollution to the environment, so hydrogen fuel cell vehicles have become a key development direction for new energy vehicles . How to adjust the power output of the hydrogen fuel cell according to the actual driving state of the vehicle during the driving process of the hydrogen fuel cell vehicle is particularly important, which is directly related to the optimization of the power output efficiency of the hydrogen fuel cell and the improvement of the mileage of the new energy vehicle.
发明内容Contents of the invention
针对现有技术存在的缺陷,本发明提供用于新能源汽车的氢燃料电池电能输出控制方法和系统,其通过拍摄和分析汽车行驶过程的外部环境影像,确定当前行驶的路段是否为交通拥堵路段;当汽车当前行驶在交通拥堵路段时,根据汽车与其前方汽车之间的距离和前方汽车的行驶速度,确定汽车自身最高允许行驶速度,以此调整汽车的氢燃料电池电能输出量;最后根据汽车的实际负重信息,确定其可行驶距离,从而对适应性提示司机对汽车进行加气,其通过对新能源汽车的实际行驶环境和实际负重信息,调整内部氢燃料电池的串联状态以使氢燃料电池能够适应性地输出不同电量,这样能够优化氢燃料电池的电能输出效率和提升新能源汽车的行驶里程。Aiming at the defects existing in the prior art, the present invention provides a hydrogen fuel cell power output control method and system for new energy vehicles, which determines whether the currently driving road section is a traffic jam road section by taking and analyzing the external environment images of the car driving process ; When the car is currently driving on a traffic jam, according to the distance between the car and the car in front and the speed of the car in front, determine the maximum allowable speed of the car itself, so as to adjust the output of the car's hydrogen fuel cell power; The actual load information of the new energy vehicle can be used to determine the driving distance, so as to remind the driver to refuel the car. It adjusts the series state of the internal hydrogen fuel cell through the actual driving environment and actual load information of the new energy vehicle. The battery can output different power adaptively, which can optimize the power output efficiency of hydrogen fuel cells and increase the mileage of new energy vehicles.
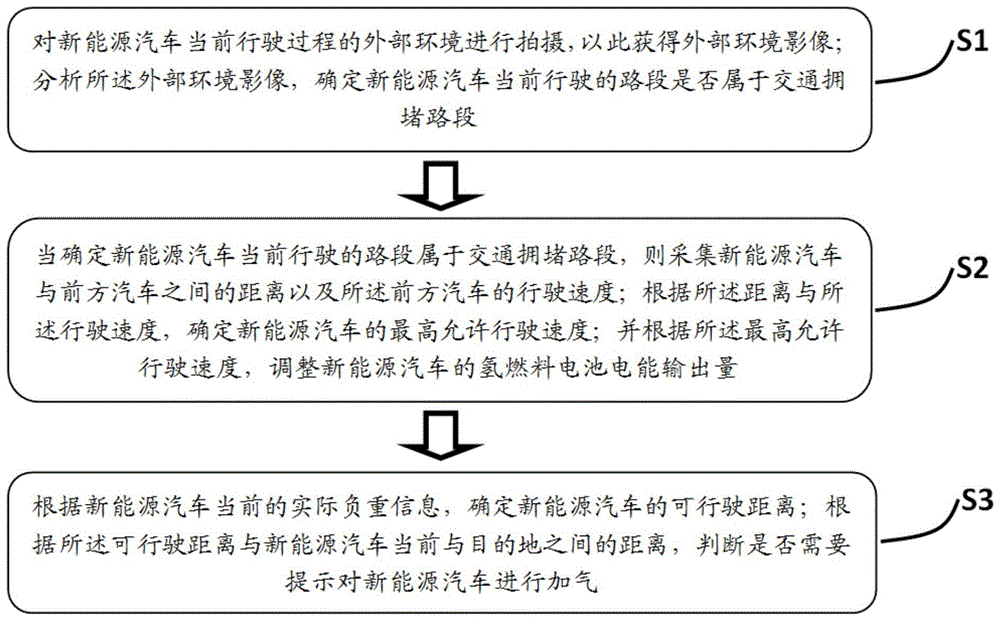
本发明提供用于新能源汽车的氢燃料电池电能输出控制方法,其特征在于,其包括如下步骤:The invention provides a hydrogen fuel cell power output control method for new energy vehicles, which is characterized in that it includes the following steps:
步骤S1,对新能源汽车当前行驶过程的外部环境进行拍摄,以此获得外部环境影像;分析所述外部环境影像,确定新能源汽车当前行驶的路段是否属于交通拥堵路段;Step S1, taking pictures of the external environment of the current driving process of the new energy vehicle to obtain an image of the external environment; analyzing the external environment image to determine whether the road section where the new energy vehicle is currently driving belongs to a road section with traffic congestion;
步骤S2,当确定新能源汽车当前行驶的路段属于交通拥堵路段,则采集新能源汽车与前方汽车之间的距离以及所述前方汽车的行驶速度;根据所述距离与所述行驶速度,确定新能源汽车的最高允许行驶速度;并根据所述最高允许行驶速度,调整新能源汽车的氢燃料电池电能输出量;Step S2, when it is determined that the road section currently driven by the new energy vehicle belongs to a road section with traffic congestion, then collect the distance between the new energy vehicle and the vehicle in front and the driving speed of the vehicle in front; determine the new energy vehicle according to the distance and the driving speed. The maximum allowable driving speed of energy vehicles; and adjust the hydrogen fuel cell electric energy output of new energy vehicles according to the maximum allowable driving speed;
步骤S3,根据新能源汽车当前的实际负重信息,确定新能源汽车的可行驶距离;根据所述可行驶距离与新能源汽车当前与目的地之间的距离,判断是否需要提示对新能源汽车进行加气;Step S3, according to the current actual load information of the new energy vehicle, determine the travelable distance of the new energy vehicle; according to the travelable distance and the current distance between the new energy vehicle and the destination, determine whether it is necessary to prompt the new energy vehicle to Aerated;
进一步,在所述步骤S1中,对新能源汽车当前行驶过程的外部环境进行拍摄,以此获得外部环境影像;分析所述外部环境影像,确定新能源汽车当前行驶的路段是否属于交通拥堵路段具体包括:Further, in the step S1, the external environment of the current driving process of the new energy vehicle is photographed to obtain an external environment image; the external environment image is analyzed to determine whether the road section on which the new energy vehicle is currently driving belongs to a road section with traffic congestion. include:
步骤S101,对新能源汽车当前行驶过程中的外部环境进行双目拍摄,以此获得外部环境双目影像;Step S101, taking binocular photography of the external environment during the current driving process of the new energy vehicle, so as to obtain a binocular image of the external environment;
步骤S102,根据所述外部环境双目影像,得到新能源汽车当前行驶过程的三维外部环境影像;从所述三维外部环境影像中识别得到外部环境的路面上单位面积存在的汽车数量;Step S102, according to the binocular image of the external environment, obtain the three-dimensional external environment image of the current driving process of the new energy vehicle; identify the number of cars existing per unit area on the road surface of the external environment from the three-dimensional external environment image;
步骤S103,将所述汽车数量与预设汽车数量阈值进行比对;若所述汽车数量大于或者等于预设汽车数量阈值,则确定新能源汽车当前行驶的路段属于交通拥堵路段;否则,确定新能源汽车当前行驶的路段不属于交通拥堵路段;Step S103, comparing the number of cars with the preset threshold of the number of cars; if the number of cars is greater than or equal to the preset threshold of the number of cars, it is determined that the road section where the new energy vehicle is currently driving belongs to a road section with traffic congestion; otherwise, it is determined that the new The road section that the energy vehicle is currently driving is not a road section with traffic congestion;
进一步,在所述步骤S2中,当确定新能源汽车当前行驶的路段属于交通拥堵路段,则采集新能源汽车与前方汽车之间的距离以及所述前方汽车的行驶速度;根据所述距离与所述行驶速度,确定新能源汽车的最高允许行驶速度;并根据所述最高允许行驶速度,调整新能源汽车的氢燃料电池电能输出量具体包括:Further, in the step S2, when it is determined that the section on which the new energy vehicle is currently driving belongs to a road section with traffic congestion, the distance between the new energy vehicle and the vehicle in front and the driving speed of the vehicle in front are collected; According to the above driving speed, determine the maximum allowable driving speed of the new energy vehicle; and according to the above maximum allowable driving speed, adjust the hydrogen fuel cell electric energy output of the new energy vehicle, specifically including:
步骤S201,当确定新能源汽车当前行驶的路段属于交通拥堵路段,则指示位于新能源汽车前端的激光测距/测速仪采集新能源汽车与前方汽车之间的距离以及所述前方汽车的行驶速度;Step S201, when it is determined that the road section that the new energy vehicle is currently driving belongs to a road section with traffic congestion, instruct the laser rangefinder/speedometer located at the front end of the new energy vehicle to collect the distance between the new energy vehicle and the vehicle in front and the driving speed of the vehicle in front ;
步骤S202,利用下面公式(1),结合所述距离与所述行驶速度,确定新能源汽车的最高允许行驶速度,Step S202, using the following formula (1), combining the distance and the driving speed, to determine the maximum allowable driving speed of the new energy vehicle,
在上述公式(1)中,Vmax表示新能源汽车的最高允许行驶速度;a表示新能源汽车的启动加速度;L表示新能源汽车与前方汽车之间的距离;V0表示前方汽车的行驶速度;In the above formula (1), V max represents the maximum allowable driving speed of the new energy vehicle; a represents the starting acceleration of the new energy vehicle; L represents the distance between the new energy vehicle and the vehicle in front; V 0 represents the driving speed of the vehicle in front ;
同时将新能源汽车的实际行驶速度限制成小于或者等于所述最高允许行驶速度;At the same time, the actual driving speed of new energy vehicles is limited to be less than or equal to the maximum allowable driving speed;
步骤S203,利用下面公式(2),结合所述最高允许行驶速度,确定新能源汽车的电池组中氢燃料电池的串联数量N,Step S203, using the following formula (2), combined with the maximum allowable driving speed, to determine the number N of hydrogen fuel cells in series in the battery pack of the new energy vehicle,

在上述公式(2)中,μ表示新能源汽车的轮胎与地面的摩擦系数;m表示新能源汽车搭载的人和货物的总重量,所述总重量是通过设置在新能源汽车座位上的重量传感器检测得到;M表示新能源汽车自身的重量;g表示重力加速度;Ie表示新能源汽车的额定电流值;U0表示单个氢燃料电池的工作电压;In the above formula (2), μ represents the friction coefficient between the tires of the new energy vehicle and the ground; The sensor detects; M represents the weight of the new energy vehicle itself; g represents the acceleration of gravity; Ie represents the rated current value of the new energy vehicle; U 0 represents the operating voltage of a single hydrogen fuel cell;
当确定新能源汽车的电池组中氢燃料电池的串联数量N,调整新能源汽车内部电池组中氢燃料电池的串联方式,从而使N个氢燃料电池能够共同串联为新能源汽车供电;When determining the number N of hydrogen fuel cells in series in the battery pack of the new energy vehicle, adjust the series connection mode of the hydrogen fuel cells in the internal battery pack of the new energy vehicle, so that N hydrogen fuel cells can be connected in series to supply power for the new energy vehicle;
进一步,在所述步骤S3中,获取新能源汽车当前的实际负重信息,并根据所述实际负重信息,确定新能源汽车的可行驶距离;根据所述可行驶距离与新能源汽车当前与目的地之间的距离,判断是否需要提示对新能源汽车进行加气具体包括:Further, in the step S3, the current actual load information of the new energy vehicle is obtained, and according to the actual load information, the travelable distance of the new energy vehicle is determined; according to the travelable distance and the current and destination of the new energy vehicle The distance between them, to determine whether it is necessary to remind the new energy vehicles to refuel, specifically includes:
步骤S301,通过设置在新能源汽车座位上的重量传感器检测得到新能源汽车搭载的人和货物的总重量,以此作为所述实际负重信息;利用下面公式(3),确定新能源汽车的可行驶距离S,In step S301, the total weight of the people and goods carried by the new energy vehicle is detected by the weight sensor arranged on the seat of the new energy vehicle, which is used as the actual load information; using the following formula (3), the possible weight of the new energy vehicle is determined. travel distance S,

在上述公式(3)中,μ表示新能源汽车的轮胎与地面的摩擦系数;m表示新能源汽车搭载的人和货物的总重量;M表示新能源汽车自身的重量;g表示重力加速度;G表示新能源汽车所有氢燃料电池当前存储的氢气质量,其单位为公斤;In the above formula (3), μ represents the friction coefficient between the tires of the new energy vehicle and the ground; m represents the total weight of people and goods carried by the new energy vehicle; M represents the weight of the new energy vehicle itself; g represents the acceleration of gravity; G Indicates the mass of hydrogen currently stored in all hydrogen fuel cells of new energy vehicles, in kilograms;
步骤S302,对新能源汽车当前所处位置进行定位,以此确定新能源汽车当前与目的地之间的距离;将所述可行驶距离与新能源汽车当前与目的地之间的距离进行比对;若所述可行驶距离小于新能源汽车当前与目的地之间的距离,则在新能源汽车的表盘中生成对新能源汽车进行加气的提示信息。Step S302, locate the current location of the new energy vehicle, so as to determine the current distance between the new energy vehicle and the destination; compare the travelable distance with the current distance between the new energy vehicle and the destination ; If the travelable distance is less than the current distance between the new energy vehicle and the destination, a prompt message for refueling the new energy vehicle is generated on the dial of the new energy vehicle.
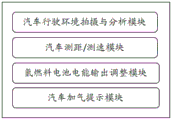
本发明还提供用于新能源汽车的氢燃料电池电能输出控制系统,其特征在于,其包括汽车行驶环境拍摄与分析模块,汽车测距/测速模块,氢燃料电池电能输出调整模块和汽车加气提示模块;其中,The present invention also provides a hydrogen fuel cell power output control system for new energy vehicles, which is characterized in that it includes a vehicle driving environment shooting and analysis module, a vehicle distance measurement/speed measurement module, a hydrogen fuel cell power output adjustment module and vehicle gas filling Prompt module; where,
所述汽车行驶环境拍摄与分析模块用于对新能源汽车当前行驶过程的外部环境进行拍摄,以此获得外部环境影像;分析所述外部环境影像,确定新能源汽车当前行驶的路段是否属于交通拥堵路段;The vehicle driving environment photographing and analysis module is used to photograph the external environment of the current driving process of the new energy vehicle to obtain an external environment image; analyze the external environment image to determine whether the road section where the new energy vehicle is currently driving belongs to traffic congestion section;
所述汽车测距/测速模块用于当确定新能源汽车当前行驶的路段属于交通拥堵路段,则采集新能源汽车与前方汽车之间的距离以及所述前方汽车的行驶速度;The vehicle distance measurement/speed measurement module is used to collect the distance between the new energy vehicle and the vehicle in front and the driving speed of the vehicle in front when it is determined that the road section on which the new energy vehicle is currently driving belongs to a traffic jam section;
所述氢燃料电池电能输出调整模块用于根据所述距离与所述行驶速度,确定新能源汽车的最高允许行驶速度;并根据所述最高允许行驶速度,调整新能源汽车的氢燃料电池电能输出量;The hydrogen fuel cell power output adjustment module is used to determine the maximum allowable driving speed of the new energy vehicle according to the distance and the driving speed; and adjust the hydrogen fuel cell power output of the new energy vehicle according to the maximum allowable driving speed quantity;
所述汽车加气提示模块用于根据新能源汽车当前的实际负重信息,确定新能源汽车的可行驶距离;根据所述可行驶距离与新能源汽车当前与目的地之间的距离,判断是否需要提示对新能源汽车进行加气;The vehicle refueling prompt module is used to determine the travelable distance of the new energy vehicle according to the current actual load information of the new energy vehicle; according to the travelable distance and the current distance between the new energy vehicle and the destination, it is judged whether it is necessary to Prompt to refuel new energy vehicles;
进一步,所述汽车行驶环境拍摄与分析模块用于对新能源汽车当前行驶过程的外部环境进行拍摄,以此获得外部环境影像;分析所述外部环境影像,确定新能源汽车当前行驶的路段是否属于交通拥堵路段具体包括:Further, the vehicle driving environment photographing and analysis module is used to photograph the external environment of the current driving process of the new energy vehicle, so as to obtain the external environment image; analyze the external environment image to determine whether the road section the new energy vehicle is currently driving belongs to Specifically, traffic jams include:
对新能源汽车当前行驶过程中的外部环境进行双目拍摄,以此获得外部环境双目影像;Take binocular shots of the external environment during the current driving process of new energy vehicles to obtain binocular images of the external environment;
根据所述外部环境双目影像,得到新能源汽车当前行驶过程的三维外部环境影像;从所述三维外部环境影像中识别得到外部环境的路面上单位面积存在的汽车数量;According to the binocular image of the external environment, a three-dimensional external environment image of the current driving process of the new energy vehicle is obtained; from the three-dimensional external environment image, the number of cars existing per unit area on the road surface of the external environment is recognized;
将所述汽车数量与预设汽车数量阈值进行比对;若所述汽车数量大于或者等于预设汽车数量阈值,则确定新能源汽车当前行驶的路段属于交通拥堵路段;否则,确定新能源汽车当前行驶的路段不属于交通拥堵路段;Comparing the number of cars with the preset threshold of the number of cars; if the number of cars is greater than or equal to the threshold of the preset number of cars, it is determined that the road section where the new energy vehicle is currently driving belongs to a road section with traffic congestion; otherwise, it is determined that the current road section of the new energy vehicle is The driving section is not a traffic jam section;
进一步,所述汽车测距/测速模块用于当确定新能源汽车当前行驶的路段属于交通拥堵路段,则采集新能源汽车与前方汽车之间的距离以及所述前方汽车的行驶速度具体包括:Further, the vehicle ranging/speed measuring module is used to collect the distance between the new energy vehicle and the vehicle in front and the driving speed of the vehicle in front when it is determined that the road section that the new energy vehicle is currently driving belongs to a traffic jam section:
当确定新能源汽车当前行驶的路段属于交通拥堵路段,则指示位于新能源汽车前端的激光测距/测速仪采集新能源汽车与前方汽车之间的距离以及所述前方汽车的行驶速度;When it is determined that the section on which the new energy vehicle is currently driving belongs to a traffic jam section, then instruct the laser rangefinder/speedometer located at the front end of the new energy vehicle to collect the distance between the new energy vehicle and the vehicle in front and the driving speed of the vehicle in front;
以及,as well as,
所述氢燃料电池电能输出调整模块用于根据所述距离与所述行驶速度,确定新能源汽车的最高允许行驶速度;并根据所述最高允许行驶速度,调整新能源汽车的氢燃料电池电能输出量具体包括:The hydrogen fuel cell power output adjustment module is used to determine the maximum allowable driving speed of the new energy vehicle according to the distance and the driving speed; and adjust the hydrogen fuel cell power output of the new energy vehicle according to the maximum allowable driving speed Quantities include:
利用下面公式(1),结合所述距离与所述行驶速度,确定新能源汽车的最高允许行驶速度,Using the following formula (1), in combination with the distance and the driving speed, determine the maximum allowable driving speed of the new energy vehicle,
在上述公式(1)中,Vmax表示新能源汽车的最高允许行驶速度;a表示新能源汽车的启动加速度;L表示新能源汽车与前方汽车之间的距离;V0表示前方汽车的行驶速度;In the above formula (1), V max represents the maximum allowable driving speed of the new energy vehicle; a represents the starting acceleration of the new energy vehicle; L represents the distance between the new energy vehicle and the vehicle in front; V 0 represents the driving speed of the vehicle in front ;
同时将新能源汽车的实际行驶速度限制成小于或者等于所述最高允许行驶速度;At the same time, the actual driving speed of new energy vehicles is limited to be less than or equal to the maximum allowable driving speed;
利用下面公式(2),结合所述最高允许行驶速度,确定新能源汽车的电池组中氢燃料电池的串联数量N,Utilize the following formula (2), in combination with the maximum allowable driving speed, determine the series number N of hydrogen fuel cells in the battery pack of the new energy vehicle,

在上述公式(2)中,μ表示新能源汽车的轮胎与地面的摩擦系数;m表示新能源汽车搭载的人和货物的总重量,所述总重量是通过设置在新能源汽车座位上的重量传感器检测得到;M表示新能源汽车自身的重量;g表示重力加速度;Ie表示新能源汽车的额定电流值;U0表示单个氢燃料电池的工作电压;In the above formula (2), μ represents the friction coefficient between the tires of the new energy vehicle and the ground; The sensor detects; M represents the weight of the new energy vehicle itself; g represents the acceleration of gravity; Ie represents the rated current value of the new energy vehicle; U 0 represents the operating voltage of a single hydrogen fuel cell;
当确定新能源汽车的电池组中氢燃料电池的串联数量N,调整新能源汽车内部电池组中氢燃料电池的串联方式,从而使N个氢燃料电池能够共同串联为新能源汽车供电;When determining the number N of hydrogen fuel cells in series in the battery pack of the new energy vehicle, adjust the series connection mode of the hydrogen fuel cells in the internal battery pack of the new energy vehicle, so that N hydrogen fuel cells can be connected in series to supply power for the new energy vehicle;
进一步,所述汽车加气提示模块用于根据新能源汽车当前的实际负重信息,确定新能源汽车的可行驶距离;根据所述可行驶距离与新能源汽车当前与目的地之间的距离,判断是否需要提示对新能源汽车进行加气具体包括:Further, the vehicle refueling prompt module is used to determine the travelable distance of the new energy vehicle according to the current actual load information of the new energy vehicle; according to the travelable distance and the current distance between the new energy vehicle and the destination, determine Whether it is necessary to prompt for refueling of new energy vehicles specifically includes:
通过设置在新能源汽车座位上的重量传感器检测得到新能源汽车搭载的人和货物的总重量,以此作为所述实际负重信息;利用下面公式(3),确定新能源汽车的可行驶距离S,The total weight of the people and goods carried by the new energy vehicle is detected by the weight sensor arranged on the seat of the new energy vehicle, as the actual load information; use the following formula (3) to determine the travelable distance S of the new energy vehicle ,

在上述公式(3)中,μ表示新能源汽车的轮胎与地面的摩擦系数;m表示新能源汽车搭载的人和货物的总重量;M表示新能源汽车自身的重量;g表示重力加速度;G表示新能源汽车所有氢燃料电池当前存储的氢气质量,其单位为公斤;In the above formula (3), μ represents the friction coefficient between the tires of the new energy vehicle and the ground; m represents the total weight of people and goods carried by the new energy vehicle; M represents the weight of the new energy vehicle itself; g represents the acceleration of gravity; G Indicates the mass of hydrogen currently stored in all hydrogen fuel cells of new energy vehicles, in kilograms;
对新能源汽车当前所处位置进行定位,以此确定新能源汽车当前与目的地之间的距离;将所述可行驶距离与新能源汽车当前与目的地之间的距离进行比对;若所述可行驶距离小于新能源汽车当前与目的地之间的距离,则在新能源汽车的表盘中生成对新能源汽车进行加气的提示信息。Position the current location of the new energy vehicle to determine the current distance between the new energy vehicle and the destination; compare the drivable distance with the current distance between the new energy vehicle and the destination; if the If the above-mentioned travelable distance is less than the current distance between the new energy vehicle and the destination, a prompt message for refueling the new energy vehicle is generated on the dial of the new energy vehicle.
相比于现有技术,该用于新能源汽车的氢燃料电池电能输出控制方法和系统通过拍摄和分析汽车行驶过程的外部环境影像,确定当前行驶的路段是否为交通拥堵路段;当汽车当前行驶在交通拥堵路段时,根据汽车与其前方汽车之间的距离和前方汽车的行驶速度,确定汽车自身最高允许行驶速度,以此调整汽车的氢燃料电池电能输出量;最后根据汽车的实际负重信息,确定其可行驶距离,从而对适应性提示司机对汽车进行加气,其通过对新能源汽车的实际行驶环境和实际负重信息,调整内部氢燃料电池的串联状态以使氢燃料电池能够适应性地输出不同电量,这样能够优化氢燃料电池的电能输出效率和提升新能源汽车的行驶里程。Compared with the prior art, the hydrogen fuel cell electric energy output control method and system for new energy vehicles determines whether the current road section is a traffic jam road section by taking and analyzing the external environment images of the car driving process; when the car is currently driving In traffic jams, according to the distance between the car and the car in front and the speed of the car in front, determine the maximum allowable speed of the car itself, so as to adjust the power output of the hydrogen fuel cell of the car; finally, according to the actual load information of the car, Determine its travelable distance, so as to remind the driver to refuel the car adaptively. It adjusts the series state of the internal hydrogen fuel cell through the actual driving environment and actual load information of the new energy vehicle so that the hydrogen fuel cell can be adaptively Output different power, which can optimize the power output efficiency of hydrogen fuel cells and improve the mileage of new energy vehicles.
本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在所写的说明书、权利要求书、以及附图中所特别指出的结构来实现和获得。Additional features and advantages of the invention will be set forth in the description which follows, and in part will be apparent from the description, or may be learned by practice of the invention. The objectives and other advantages of the invention may be realized and attained by the structure particularly pointed out in the written description and claims hereof as well as the appended drawings.
下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。The technical solutions of the present invention will be described in further detail below with reference to the accompanying drawings and embodiments.
附图说明Description of drawings
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。In order to more clearly illustrate the technical solutions in the embodiments of the present invention or the prior art, the following will briefly introduce the drawings that need to be used in the description of the embodiments or the prior art. Obviously, the accompanying drawings in the following description are only These are some embodiments of the present invention. Those skilled in the art can also obtain other drawings based on these drawings without creative work.
图1为本发明提供的用于新能源汽车的氢燃料电池电能输出控制方法的流程示意图。FIG. 1 is a schematic flowchart of a hydrogen fuel cell power output control method for new energy vehicles provided by the present invention.
图2为本发明提供的用于新能源汽车的氢燃料电池电能输出控制系统的结构示意图。Fig. 2 is a schematic structural diagram of a hydrogen fuel cell power output control system for new energy vehicles provided by the present invention.
具体实施方式Detailed ways
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without creative efforts fall within the protection scope of the present invention.
参阅图1,为本发明实施例提供的用于新能源汽车的氢燃料电池电能输出控制方法的流程示意图。该用于新能源汽车的氢燃料电池电能输出控制方法包括如下步骤:Referring to FIG. 1 , it is a schematic flowchart of a hydrogen fuel cell electric energy output control method for a new energy vehicle provided by an embodiment of the present invention. The hydrogen fuel cell power output control method for new energy vehicles includes the following steps:
步骤S1,对新能源汽车当前行驶过程的外部环境进行拍摄,以此获得外部环境影像;分析该外部环境影像,确定新能源汽车当前行驶的路段是否属于交通拥堵路段;Step S1, photographing the external environment of the current driving process of the new energy vehicle to obtain an external environment image; analyzing the external environment image to determine whether the road section where the new energy vehicle is currently driving belongs to a traffic jam section;
步骤S2,当确定新能源汽车当前行驶的路段属于交通拥堵路段,则采集新能源汽车与前方汽车之间的距离以及该前方汽车的行驶速度;根据该距离与该行驶速度,确定新能源汽车的最高允许行驶速度;并根据该最高允许行驶速度,调整新能源汽车的氢燃料电池电能输出量;Step S2, when it is determined that the road section that the new energy vehicle is currently driving belongs to a road section with traffic congestion, then collect the distance between the new energy vehicle and the vehicle in front and the driving speed of the vehicle in front; The maximum allowable driving speed; and according to the maximum allowable driving speed, adjust the electric energy output of the hydrogen fuel cell of the new energy vehicle;
步骤S3,根据新能源汽车当前的实际负重信息,确定新能源汽车的可行驶距离;根据该可行驶距离与新能源汽车当前与目的地之间的距离,判断是否需要提示对新能源汽车进行加气。Step S3, according to the current actual load information of the new energy vehicle, determine the travelable distance of the new energy vehicle; according to the travelable distance and the current distance between the new energy vehicle and the destination, determine whether it is necessary to prompt the new energy vehicle to recharge. gas.
上述技术方案的有益效果为:该用于新能源汽车的氢燃料电池电能输出控制方法通过拍摄和分析汽车行驶过程的外部环境影像,确定当前行驶的路段是否为交通拥堵路段;当汽车当前行驶在交通拥堵路段时,根据汽车与其前方汽车之间的距离和前方汽车的行驶速度,确定汽车自身最高允许行驶速度,以此调整汽车的氢燃料电池电能输出量;最后根据汽车的实际负重信息,确定其可行驶距离,从而对适应性提示司机对汽车进行加气,其通过对新能源汽车的实际行驶环境和实际负重信息,调整内部氢燃料电池的串联状态以使氢燃料电池能够适应性地输出不同电量,这样能够优化氢燃料电池的电能输出效率和提升新能源汽车的行驶里程。The beneficial effect of the above technical solution is: the hydrogen fuel cell electric energy output control method for new energy vehicles determines whether the current driving road section is a traffic jam road section by taking and analyzing the external environment image of the driving process of the car; When the traffic is congested, according to the distance between the car and the car in front and the speed of the car in front, determine the maximum allowable speed of the car itself, so as to adjust the output of hydrogen fuel cell power of the car; finally, according to the actual load information of the car, determine It can travel distance, so as to remind the driver to refuel the car adaptively. It adjusts the series state of the internal hydrogen fuel cell through the actual driving environment and actual load information of the new energy vehicle so that the hydrogen fuel cell can output adaptively. This can optimize the power output efficiency of hydrogen fuel cells and increase the mileage of new energy vehicles.
优选地,在该步骤S1中,对新能源汽车当前行驶过程的外部环境进行拍摄,以此获得外部环境影像;分析该外部环境影像,确定新能源汽车当前行驶的路段是否属于交通拥堵路段具体包括:Preferably, in this step S1, the external environment of the current driving process of the new energy vehicle is photographed to obtain an external environment image; the external environment image is analyzed to determine whether the road section on which the new energy vehicle is currently traveling belongs to a road section with traffic congestion. :
步骤S101,对新能源汽车当前行驶过程中的外部环境进行双目拍摄,以此获得外部环境双目影像;Step S101, taking binocular photography of the external environment during the current driving process of the new energy vehicle, so as to obtain a binocular image of the external environment;
步骤S102,根据该外部环境双目影像,得到新能源汽车当前行驶过程的三维外部环境影像;从该三维外部环境影像中识别得到外部环境的路面上单位面积存在的汽车数量;Step S102, according to the binocular image of the external environment, obtain the three-dimensional external environment image of the current driving process of the new energy vehicle; identify the number of cars existing per unit area on the road surface of the external environment from the three-dimensional external environment image;
步骤S103,将该汽车数量与预设汽车数量阈值进行比对;若该汽车数量大于或者等于预设汽车数量阈值,则确定新能源汽车当前行驶的路段属于交通拥堵路段;否则,确定新能源汽车当前行驶的路段不属于交通拥堵路段。Step S103, comparing the number of cars with the preset number threshold of cars; if the number of cars is greater than or equal to the preset number threshold of cars, it is determined that the road section where the new energy vehicle is currently driving belongs to a road section with traffic congestion; otherwise, it is determined that the new energy vehicle The current road segment is not a traffic jam road segment.
上述技术方案的有益效果为:新能源汽车若行驶在交通拥堵路段,则新能源汽车行驶过程中会处于断断续续移动的状态,此时新能源汽车的电动机也无法进行平稳的动力输出,相应地新能源汽车中的氢燃料电池需要向电动机输出较大的电量才能维持电动机的正常运作。为了及时调整新能源汽车中氢燃料电池的电量输出状态,需要对新能源汽车当前行驶的外部环境的进行影像拍摄和分析。在实际操作中可通过设置在新能源汽车双目摄像头,对新能源汽车当前行驶过程中的外部环境进行双目拍摄,接着通过计算拍摄得到的外部环境双目影像的影像视差,生成相应的三维外部环境影像。再利用汽车外形轮廓识别的方式从该三维外部环境影像中识别得到外部环境的路面上单位面积存在的汽车数量,并结合阈值对比的方式,能够定量地判断新能源汽车当前行驶的路段是否属于交通拥堵路段。The beneficial effect of the above technical solution is: if the new energy vehicle is driving on a traffic jam section, the new energy vehicle will be in a state of intermittent movement during driving. Hydrogen fuel cells in energy vehicles need to output a large amount of electricity to the motor to maintain the normal operation of the motor. In order to timely adjust the power output status of hydrogen fuel cells in new energy vehicles, it is necessary to capture and analyze images of the external environment where new energy vehicles are currently driving. In actual operation, the binocular camera of the new energy vehicle can be set up to take binocular shots of the external environment during the current driving process of the new energy vehicle, and then calculate the image parallax of the binocular images of the external environment obtained by calculating the corresponding three-dimensional Images of the external environment. Then use the method of vehicle outline recognition to identify the number of vehicles per unit area on the road surface of the external environment from the three-dimensional external environment image, and combine the method of threshold value comparison to quantitatively determine whether the current road section of the new energy vehicle belongs to traffic Congested road.
优选地,在该步骤S2中,当确定新能源汽车当前行驶的路段属于交通拥堵路段,则采集新能源汽车与前方汽车之间的距离以及该前方汽车的行驶速度;根据该距离与该行驶速度,确定新能源汽车的最高允许行驶速度;并根据该最高允许行驶速度,调整新能源汽车的氢燃料电池电能输出量具体包括:Preferably, in this step S2, when it is determined that the road section on which the new energy vehicle is currently traveling belongs to a traffic jam road section, the distance between the new energy vehicle and the vehicle in front and the driving speed of the vehicle in front are collected; according to the distance and the driving speed , to determine the maximum allowable driving speed of new energy vehicles; and according to the maximum allowable driving speed, the adjustment of the hydrogen fuel cell electric energy output of new energy vehicles specifically includes:
步骤S201,当确定新能源汽车当前行驶的路段属于交通拥堵路段,则指示位于新能源汽车前端的激光测距/测速仪采集新能源汽车与前方汽车之间的距离以及该前方汽车的行驶速度;Step S201, when it is determined that the road section on which the new energy vehicle is currently driving belongs to a road section with traffic congestion, instruct the laser rangefinder/speedometer located at the front end of the new energy vehicle to collect the distance between the new energy vehicle and the vehicle in front and the driving speed of the vehicle in front;
步骤S202,利用下面公式(1),结合该距离与该行驶速度,确定新能源汽车的最高允许行驶速度,Step S202, using the following formula (1), combining the distance and the driving speed, to determine the maximum allowable driving speed of the new energy vehicle,

在上述公式(1)中,Vmax表示新能源汽车的最高允许行驶速度;a表示新能源汽车的启动加速度;L表示新能源汽车与前方汽车之间的距离;V0表示前方汽车的行驶速度;In the above formula (1), V max represents the maximum allowable driving speed of the new energy vehicle; a represents the starting acceleration of the new energy vehicle; L represents the distance between the new energy vehicle and the vehicle in front; V 0 represents the driving speed of the vehicle in front ;
同时将新能源汽车的实际行驶速度限制成小于或者等于该最高允许行驶速度;At the same time, the actual driving speed of new energy vehicles is limited to be less than or equal to the maximum allowable driving speed;
步骤S203,利用下面公式(2),结合该最高允许行驶速度,确定新能源汽车的电池组中氢燃料电池的串联数量N,Step S203, using the following formula (2), combined with the maximum allowable driving speed, to determine the number N of hydrogen fuel cells in series in the battery pack of the new energy vehicle,

在上述公式(2)中,μ表示新能源汽车的轮胎与地面的摩擦系数;m表示新能源汽车搭载的人和货物的总重量,该总重量是通过设置在新能源汽车座位上的重量传感器检测得到;M表示新能源汽车自身的重量;g表示重力加速度;Ie表示新能源汽车的额定电流值;U0表示单个氢燃料电池的工作电压;In the above formula (2), μ represents the friction coefficient between the tire of the new energy vehicle and the ground; Detected; M represents the weight of the new energy vehicle itself; g represents the acceleration of gravity; Ie represents the rated current value of the new energy vehicle; U 0 represents the operating voltage of a single hydrogen fuel cell;
当确定新能源汽车的电池组中氢燃料电池的串联数量N,调整新能源汽车内部电池组中氢燃料电池的串联方式,从而使N个氢燃料电池能够共同串联为新能源汽车供电。When determining the number N of hydrogen fuel cells in series in the battery pack of new energy vehicles, adjust the series connection of hydrogen fuel cells in the internal battery pack of new energy vehicles, so that N hydrogen fuel cells can be connected in series to supply power for new energy vehicles.
上述技术方案的有益效果为:当新能源汽车当前行驶的路段属于交通拥堵路段时,为了保证新能源汽车的行驶安全且不与前方汽车发生碰撞,需要实时检测前方汽车的行驶速度以及新能源汽车与前方汽车之间的距离,在实际操作中,可在新能源汽车的前端安装激光测距/测速仪来对前方汽车进行检测,从而实时获得前方汽车的行驶速度以及新能源汽车与前方汽车之间的距离,该激光测距/测速仪的测距/测速过程属于本领域的常规测量过程,这里不做详细的累述。利用上述公式(1),能够根据实时测量得到的前方汽车的行驶速度和新能源汽车与前方汽车之间的距离,得到新能源汽车的最高允许行驶速度,只要新能源汽车的实际行驶速度限制在该最高允许行驶速度之下,新能源汽车就能够与前方汽车始终保持安全的行驶距离,这样能够大大降低新能源汽车在行驶过程中发生意外的几率。此外,利用上述公式(2),结合该最高允许行驶速度,确定新能源汽车的电池组中氢燃料电池的整体串联数量。新能源汽车中通常包括多个单一氢燃料电池,在新能源汽车运行过程中可通过串联不同数量的氢燃料电池形成不同的电池组,当串联的氢燃料电池的数量越多,对应形成电池组输出的电量也越大。通过上述公式(2)得到的新能源汽车的电池组中氢燃料电池的串联数量N,基于该串联数量N形成电池组,其向电动机输出电能时能够保证新能源汽车的最大行驶速度不会超过该最高允许行驶速度,从而确保新能源汽车的行驶安全性。The beneficial effect of the above-mentioned technical solution is: when the road section that the new energy vehicle is currently driving belongs to a road section with traffic congestion, in order to ensure the driving safety of the new energy vehicle and not collide with the vehicle in front, it is necessary to detect the driving speed of the vehicle in front and the speed of the new energy vehicle in real time. In actual operation, a laser rangefinder/speedometer can be installed on the front of the new energy vehicle to detect the vehicle in front, so as to obtain the driving speed of the vehicle in front and the distance between the new energy vehicle and the vehicle in front in real time. The distance between them, the ranging/velocity measuring process of the laser rangefinder/velocity meter belongs to the conventional measurement process in this field, and will not be described in detail here. Using the above formula (1), the maximum allowable speed of the new energy vehicle can be obtained based on the real-time measured speed of the vehicle in front and the distance between the new energy vehicle and the vehicle in front, as long as the actual speed of the new energy vehicle is limited to Under the maximum allowable driving speed, the new energy vehicle can always maintain a safe driving distance with the vehicle in front, which can greatly reduce the chance of accidents during the driving of the new energy vehicle. In addition, using the above formula (2), combined with the maximum allowable driving speed, determine the overall serial number of hydrogen fuel cells in the battery pack of the new energy vehicle. New energy vehicles usually include multiple single hydrogen fuel cells. During the operation of new energy vehicles, different battery packs can be formed by connecting different numbers of hydrogen fuel cells in series. When the number of hydrogen fuel cells in series is more, the corresponding battery pack The output power is also greater. The series number N of hydrogen fuel cells in the battery pack of the new energy vehicle obtained by the above formula (2), based on the series number N, a battery pack is formed, and when it outputs electric energy to the motor, it can ensure that the maximum driving speed of the new energy vehicle will not exceed This maximum allowable driving speed ensures the driving safety of new energy vehicles.
优选地,在该步骤S3中,获取新能源汽车当前的实际负重信息,并根据该实际负重信息,确定新能源汽车的可行驶距离;根据该可行驶距离与新能源汽车当前与目的地之间的距离,判断是否需要提示对新能源汽车进行加气具体包括:Preferably, in this step S3, the current actual load information of the new energy vehicle is obtained, and according to the actual load information, the travelable distance of the new energy vehicle is determined; according to the travelable distance and the current distance between the new energy vehicle and the destination The distance to judge whether it is necessary to remind the new energy vehicle to refuel specifically includes:
步骤S301,通过设置在新能源汽车座位上的重量传感器检测得到新能源汽车搭载的人和货物的总重量,以此作为该实际负重信息;利用下面公式(3),确定新能源汽车的可行驶距离S,In step S301, the total weight of the people and goods carried by the new energy vehicle is detected by the weight sensor installed on the seat of the new energy vehicle, which is used as the actual load information; use the following formula (3) to determine the drivability of the new energy vehicle distance S,

在上述公式(3)中,μ表示新能源汽车的轮胎与地面的摩擦系数;m表示新能源汽车搭载的人和货物的总重量;M表示新能源汽车自身的重量;g表示重力加速度;G表示新能源汽车所有氢燃料电池当前存储的氢气质量,其单位为公斤;In the above formula (3), μ represents the friction coefficient between the tires of the new energy vehicle and the ground; m represents the total weight of people and goods carried by the new energy vehicle; M represents the weight of the new energy vehicle itself; g represents the acceleration of gravity; G Indicates the mass of hydrogen currently stored in all hydrogen fuel cells of new energy vehicles, in kilograms;
步骤S302,对新能源汽车当前所处位置进行定位,以此确定新能源汽车当前与目的地之间的距离;将该可行驶距离与新能源汽车当前与目的地之间的距离进行比对;若该可行驶距离小于新能源汽车当前与目的地之间的距离,则在新能源汽车的表盘中生成对新能源汽车进行加气的提示信息。Step S302, locating the current location of the new energy vehicle to determine the current distance between the new energy vehicle and the destination; comparing the drivable distance with the current distance between the new energy vehicle and the destination; If the travelable distance is less than the current distance between the new energy vehicle and the destination, a prompt message for refueling the new energy vehicle is generated on the dial of the new energy vehicle.
上述技术方案的有益效果为:当新能源汽车搭载的人和/或货物的重量越大,其内部的氢燃料电池的电量消耗品速度也越快,利用上述公式(3),结合新能源汽车搭载的人和货物的总重量,能够快速地得到新能源汽车在当前负重状态下氢燃料电池能够驱动新能源汽车的可行驶距离。再结合阈值对比的方式,确定是否需要提示司机对新能源汽车进行加气,从而有效地保证新能源汽车的持续平稳行驶。The beneficial effect of the above technical solution is: when the weight of the people and/or goods carried by the new energy vehicle is greater, the power consumption of the hydrogen fuel cell inside it is also faster. Using the above formula (3), combined with the new energy vehicle The total weight of the people and goods carried can quickly get the driving distance of the new energy vehicle that the hydrogen fuel cell can drive the new energy vehicle under the current load state. Combined with the method of threshold comparison, it is determined whether it is necessary to prompt the driver to refuel the new energy vehicle, so as to effectively ensure the continuous and stable driving of the new energy vehicle.
参阅图2,为本发明实施例提供的用于新能源汽车的氢燃料电池电能输出控制系统的结构示意图。该用于新能源汽车的氢燃料电池电能输出控制系统包括汽车行驶环境拍摄与分析模块,汽车测距/测速模块,氢燃料电池电能输出调整模块和汽车加气提示模块;其中,Referring to FIG. 2 , it is a schematic structural diagram of a hydrogen fuel cell power output control system for a new energy vehicle provided by an embodiment of the present invention. The hydrogen fuel cell power output control system for new energy vehicles includes a vehicle driving environment shooting and analysis module, a vehicle distance measurement/speed measurement module, a hydrogen fuel cell power output adjustment module and a vehicle refueling prompt module; among them,
该汽车行驶环境拍摄与分析模块用于对新能源汽车当前行驶过程的外部环境进行拍摄,以此获得外部环境影像;分析该外部环境影像,确定新能源汽车当前行驶的路段是否属于交通拥堵路段;The vehicle driving environment shooting and analysis module is used to shoot the external environment of the current driving process of the new energy vehicle, so as to obtain the external environment image; analyze the external environment image to determine whether the road section where the new energy vehicle is currently driving belongs to a traffic jam section;
该汽车测距/测速模块用于当确定新能源汽车当前行驶的路段属于交通拥堵路段,则采集新能源汽车与前方汽车之间的距离以及该前方汽车的行驶速度;The vehicle distance measurement/speed measurement module is used to collect the distance between the new energy vehicle and the vehicle in front and the driving speed of the vehicle in front when it is determined that the road section on which the new energy vehicle is currently driving belongs to a traffic jam section;
该氢燃料电池电能输出调整模块用于根据该距离与该行驶速度,确定新能源汽车的最高允许行驶速度;并根据该最高允许行驶速度,调整新能源汽车的氢燃料电池电能输出量;The hydrogen fuel cell power output adjustment module is used to determine the maximum allowable travel speed of the new energy vehicle according to the distance and the travel speed; and adjust the hydrogen fuel cell power output of the new energy vehicle according to the maximum allowable travel speed;
该汽车加气提示模块用于根据新能源汽车当前的实际负重信息,确定新能源汽车的可行驶距离;根据该可行驶距离与新能源汽车当前与目的地之间的距离,判断是否需要提示对新能源汽车进行加气。The vehicle refueling prompt module is used to determine the travelable distance of the new energy vehicle according to the current actual load information of the new energy vehicle; according to the travelable distance and the current distance between the new energy vehicle and the destination, it is judged whether it is necessary to prompt Refueling of new energy vehicles.
上述技术方案的有益效果为:该用于新能源汽车的氢燃料电池电能输出控制系统通过拍摄和分析汽车行驶过程的外部环境影像,确定当前行驶的路段是否为交通拥堵路段;当汽车当前行驶在交通拥堵路段时,根据汽车与其前方汽车之间的距离和前方汽车的行驶速度,确定汽车自身最高允许行驶速度,以此调整汽车的氢燃料电池电能输出量;最后根据汽车的实际负重信息,确定其可行驶距离,从而对适应性提示司机对汽车进行加气,其通过对新能源汽车的实际行驶环境和实际负重信息,调整内部氢燃料电池的串联状态以使氢燃料电池能够适应性地输出不同电量,这样能够优化氢燃料电池的电能输出效率和提升新能源汽车的行驶里程。The beneficial effect of the above technical solution is: the hydrogen fuel cell electric energy output control system for new energy vehicles determines whether the current road section is a traffic jam road section by taking and analyzing the external environment images of the car driving process; When the traffic is congested, according to the distance between the car and the car in front and the speed of the car in front, determine the maximum allowable speed of the car itself, so as to adjust the output of hydrogen fuel cell power of the car; finally, according to the actual load information of the car, determine It can travel distance, so as to remind the driver to refuel the car adaptively. It adjusts the series state of the internal hydrogen fuel cell through the actual driving environment and actual load information of the new energy vehicle so that the hydrogen fuel cell can output adaptively. This can optimize the power output efficiency of hydrogen fuel cells and increase the mileage of new energy vehicles.
优选地,该汽车行驶环境拍摄与分析模块用于对新能源汽车当前行驶过程的外部环境进行拍摄,以此获得外部环境影像;分析该外部环境影像,确定新能源汽车当前行驶的路段是否属于交通拥堵路段具体包括:Preferably, the vehicle driving environment shooting and analysis module is used to shoot the external environment of the current driving process of the new energy vehicle, so as to obtain the external environment image; analyze the external environment image to determine whether the road section where the new energy vehicle is currently driving belongs to the traffic environment. Congested roads specifically include:
对新能源汽车当前行驶过程中的外部环境进行双目拍摄,以此获得外部环境双目影像;Take binocular shots of the external environment during the current driving process of new energy vehicles to obtain binocular images of the external environment;
根据该外部环境双目影像,得到新能源汽车当前行驶过程的三维外部环境影像;从该三维外部环境影像中识别得到外部环境的路面上单位面积存在的汽车数量;According to the binocular image of the external environment, the three-dimensional external environment image of the current driving process of the new energy vehicle is obtained; from the three-dimensional external environment image, the number of cars existing per unit area on the road surface of the external environment is recognized;
将该汽车数量与预设汽车数量阈值进行比对;若该汽车数量大于或者等于预设汽车数量阈值,则确定新能源汽车当前行驶的路段属于交通拥堵路段;否则,确定新能源汽车当前行驶的路段不属于交通拥堵路段。Compare the number of cars with the preset car number threshold; if the number of cars is greater than or equal to the preset car number threshold, it is determined that the road section that the new energy vehicle is currently driving belongs to a traffic jam road section; otherwise, it is determined that the new energy vehicle is currently driving. The road segment is not a traffic jam road segment.
上述技术方案的有益效果为:新能源汽车若行驶在交通拥堵路段,则新能源汽车行驶过程中会处于断断续续移动的状态,此时新能源汽车的电动机也无法进行平稳的动力输出,相应地新能源汽车中的氢燃料电池需要向电动机输出较大的电量才能维持电动机的正常运作。为了及时调整新能源汽车中氢燃料电池的电量输出状态,需要对新能源汽车当前行驶的外部环境的进行影像拍摄和分析。在实际操作中可通过设置在新能源汽车双目摄像头,对新能源汽车当前行驶过程中的外部环境进行双目拍摄,接着通过计算拍摄得到的外部环境双目影像的影像视差,生成相应的三维外部环境影像。再利用汽车外形轮廓识别的方式从该三维外部环境影像中识别得到外部环境的路面上单位面积存在的汽车数量,并结合阈值对比的方式,能够定量地判断新能源汽车当前行驶的路段是否属于交通拥堵路段。The beneficial effect of the above technical solution is: if the new energy vehicle is driving on a traffic jam section, the new energy vehicle will be in a state of intermittent movement during driving. Hydrogen fuel cells in energy vehicles need to output a large amount of electricity to the motor to maintain the normal operation of the motor. In order to timely adjust the power output status of hydrogen fuel cells in new energy vehicles, it is necessary to capture and analyze images of the external environment where new energy vehicles are currently driving. In actual operation, the binocular camera of the new energy vehicle can be set up to take binocular shots of the external environment during the current driving process of the new energy vehicle, and then calculate the image parallax of the binocular images of the external environment obtained by calculating the corresponding three-dimensional Images of the external environment. Then use the method of vehicle outline recognition to identify the number of vehicles per unit area on the road surface of the external environment from the three-dimensional external environment image, and combine the method of threshold value comparison to quantitatively determine whether the current road section of the new energy vehicle belongs to traffic Congested road.
优选地,该汽车测距/测速模块用于当确定新能源汽车当前行驶的路段属于交通拥堵路段,则采集新能源汽车与前方汽车之间的距离以及该前方汽车的行驶速度具体包括:Preferably, the vehicle distance measurement/velocity measurement module is used to collect the distance between the new energy vehicle and the vehicle in front and the speed of the vehicle in front when it is determined that the road section on which the new energy vehicle is currently traveling belongs to a traffic jam section:
当确定新能源汽车当前行驶的路段属于交通拥堵路段,则指示位于新能源汽车前端的激光测距/测速仪采集新能源汽车与前方汽车之间的距离以及该前方汽车的行驶速度;When it is determined that the road section that the new energy vehicle is currently driving belongs to a traffic jam section, instruct the laser rangefinder/speedometer located at the front end of the new energy vehicle to collect the distance between the new energy vehicle and the vehicle in front and the driving speed of the vehicle in front;
以及,as well as,
该氢燃料电池电能输出调整模块用于根据该距离与该行驶速度,确定新能源汽车的最高允许行驶速度;并根据该最高允许行驶速度,调整新能源汽车的氢燃料电池电能输出量具体包括:The hydrogen fuel cell electric energy output adjustment module is used to determine the maximum allowable driving speed of the new energy vehicle according to the distance and the driving speed; and adjust the hydrogen fuel cell electric energy output of the new energy vehicle according to the maximum allowable driving speed, specifically including:
利用下面公式(1),结合该距离与该行驶速度,确定新能源汽车的最高允许行驶速度,Using the following formula (1), combine the distance and the driving speed to determine the maximum allowable driving speed of the new energy vehicle,

在上述公式(1)中,Vmax表示新能源汽车的最高允许行驶速度;a表示新能源汽车的启动加速度;L表示新能源汽车与前方汽车之间的距离;V0表示前方汽车的行驶速度;In the above formula (1), V max represents the maximum allowable driving speed of the new energy vehicle; a represents the starting acceleration of the new energy vehicle; L represents the distance between the new energy vehicle and the vehicle in front; V 0 represents the driving speed of the vehicle in front ;
同时将新能源汽车的实际行驶速度限制成小于或者等于该最高允许行驶速度;At the same time, the actual driving speed of new energy vehicles is limited to be less than or equal to the maximum allowable driving speed;
利用下面公式(2),结合该最高允许行驶速度,确定新能源汽车的电池组中氢燃料电池的串联数量N,Using the following formula (2), combined with the maximum allowable driving speed, determine the series number N of hydrogen fuel cells in the battery pack of the new energy vehicle,

在上述公式(2)中,μ表示新能源汽车的轮胎与地面的摩擦系数;m表示新能源汽车搭载的人和货物的总重量,该总重量是通过设置在新能源汽车座位上的重量传感器检测得到;M表示新能源汽车自身的重量;g表示重力加速度;Ie表示新能源汽车的额定电流值;U0表示单个氢燃料电池的工作电压;In the above formula (2), μ represents the friction coefficient between the tire of the new energy vehicle and the ground; Detected; M represents the weight of the new energy vehicle itself; g represents the acceleration of gravity; Ie represents the rated current value of the new energy vehicle; U 0 represents the operating voltage of a single hydrogen fuel cell;
当确定新能源汽车的电池组中氢燃料电池的串联数量N,调整新能源汽车内部电池组中氢燃料电池的串联方式,从而使N个氢燃料电池能够共同串联为新能源汽车供电。When determining the number N of hydrogen fuel cells in series in the battery pack of new energy vehicles, adjust the series connection of hydrogen fuel cells in the internal battery pack of new energy vehicles, so that N hydrogen fuel cells can be connected in series to supply power for new energy vehicles.
上述技术方案的有益效果为:当新能源汽车当前行驶的路段属于交通拥堵路段时,为了保证新能源汽车的行驶安全且不与前方汽车发生碰撞,需要实时检测前方汽车的行驶速度以及新能源汽车与前方汽车之间的距离,在实际操作中,可在新能源汽车的前端安装激光测距/测速仪来对前方汽车进行检测,从而实时获得前方汽车的行驶速度以及新能源汽车与前方汽车之间的距离,该激光测距/测速仪的测距/测速过程属于本领域的常规测量过程,这里不做详细的累述。利用上述公式(1),能够根据实时测量得到的前方汽车的行驶速度和新能源汽车与前方汽车之间的距离,得到新能源汽车的最高允许行驶速度,只要新能源汽车的实际行驶速度限制在该最高允许行驶速度之下,新能源汽车就能够与前方汽车始终保持安全的行驶距离,这样能够大大降低新能源汽车在行驶过程中发生意外的几率。此外,利用上述公式(2),结合该最高允许行驶速度,确定新能源汽车的电池组中氢燃料电池的整体串联数量。新能源汽车中通常包括多个单一氢燃料电池,在新能源汽车运行过程中可通过串联不同数量的氢燃料电池形成不同的电池组,当串联的氢燃料电池的数量越多,对应形成电池组输出的电量也越大。通过上述公式(2)得到的新能源汽车的电池组中氢燃料电池的串联数量N,基于该串联数量N形成电池组,其向电动机输出电能时能够保证新能源汽车的最大行驶速度不会超过该最高允许行驶速度,从而确保新能源汽车的行驶安全性。The beneficial effect of the above-mentioned technical solution is: when the road section that the new energy vehicle is currently driving belongs to a road section with traffic congestion, in order to ensure the driving safety of the new energy vehicle and not collide with the vehicle in front, it is necessary to detect the driving speed of the vehicle in front and the speed of the new energy vehicle in real time. In actual operation, a laser rangefinder/speedometer can be installed on the front of the new energy vehicle to detect the vehicle in front, so as to obtain the driving speed of the vehicle in front and the distance between the new energy vehicle and the vehicle in front in real time. The distance between them, the ranging/velocity measuring process of the laser rangefinder/velocity meter belongs to the conventional measurement process in this field, and will not be described in detail here. Using the above formula (1), the maximum allowable speed of the new energy vehicle can be obtained based on the real-time measured speed of the vehicle in front and the distance between the new energy vehicle and the vehicle in front, as long as the actual speed of the new energy vehicle is limited to Under the maximum allowable driving speed, the new energy vehicle can always maintain a safe driving distance with the vehicle in front, which can greatly reduce the chance of accidents during the driving of the new energy vehicle. In addition, using the above formula (2), combined with the maximum allowable driving speed, determine the overall serial number of hydrogen fuel cells in the battery pack of the new energy vehicle. New energy vehicles usually include multiple single hydrogen fuel cells. During the operation of new energy vehicles, different battery packs can be formed by connecting different numbers of hydrogen fuel cells in series. When the number of hydrogen fuel cells in series is more, the corresponding battery pack The output power is also greater. The series number N of hydrogen fuel cells in the battery pack of the new energy vehicle obtained by the above formula (2), based on the series number N, a battery pack is formed, and when it outputs electric energy to the motor, it can ensure that the maximum driving speed of the new energy vehicle will not exceed This maximum allowable driving speed ensures the driving safety of new energy vehicles.
优选地,该汽车加气提示模块用于根据新能源汽车当前的实际负重信息,确定新能源汽车的可行驶距离;根据该可行驶距离与新能源汽车当前与目的地之间的距离,判断是否需要提示对新能源汽车进行加气具体包括:Preferably, the vehicle refueling prompt module is used to determine the travelable distance of the new energy vehicle according to the current actual load information of the new energy vehicle; according to the travelable distance and the current distance between the new energy vehicle and the destination, it is judged whether Need to be reminded to refuel new energy vehicles, including:
通过设置在新能源汽车座位上的重量传感器检测得到新能源汽车搭载的人和货物的总重量,以此作为该实际负重信息;利用下面公式(3),确定新能源汽车的可行驶距离S,The total weight of the people and goods carried by the new energy vehicle can be obtained by detecting the weight sensor installed on the seat of the new energy vehicle, as the actual load information; use the following formula (3) to determine the travelable distance S of the new energy vehicle,

在上述公式(3)中,μ表示新能源汽车的轮胎与地面的摩擦系数;m表示新能源汽车搭载的人和货物的总重量;M表示新能源汽车自身的重量;g表示重力加速度;G表示新能源汽车所有氢燃料电池当前存储的氢气质量,其单位为公斤;In the above formula (3), μ represents the friction coefficient between the tires of the new energy vehicle and the ground; m represents the total weight of people and goods carried by the new energy vehicle; M represents the weight of the new energy vehicle itself; g represents the acceleration of gravity; G Indicates the mass of hydrogen currently stored in all hydrogen fuel cells of new energy vehicles, in kilograms;
对新能源汽车当前所处位置进行定位,以此确定新能源汽车当前与目的地之间的距离;将该可行驶距离与新能源汽车当前与目的地之间的距离进行比对;若该可行驶距离小于新能源汽车当前与目的地之间的距离,则在新能源汽车的表盘中生成对新能源汽车进行加气的提示信息。Position the current location of the new energy vehicle to determine the current distance between the new energy vehicle and the destination; compare the travelable distance with the current distance between the new energy vehicle and the destination; If the driving distance is less than the current distance between the new energy vehicle and the destination, a prompt message for refueling the new energy vehicle is generated on the dial of the new energy vehicle.
上述技术方案的有益效果为:当新能源汽车搭载的人和/或货物的重量越大,其内部的氢燃料电池的电量消耗品速度也越快,利用上述公式(3),结合新能源汽车搭载的人和货物的总重量,能够快速地得到新能源汽车在当前负重状态下氢燃料电池能够驱动新能源汽车的可行驶距离。再结合阈值对比的方式,确定是否需要提示司机对新能源汽车进行加气,从而有效地保证新能源汽车的持续平稳行驶。The beneficial effect of the above technical solution is: when the weight of the people and/or goods carried by the new energy vehicle is greater, the power consumption of the hydrogen fuel cell inside it is also faster. Using the above formula (3), combined with the new energy vehicle The total weight of the people and goods carried can quickly get the driving distance of the new energy vehicle that the hydrogen fuel cell can drive the new energy vehicle under the current load state. Combined with the method of threshold comparison, it is determined whether it is necessary to prompt the driver to refuel the new energy vehicle, so as to effectively ensure the continuous and stable driving of the new energy vehicle.
从上述实施例的内容可知,该基于新能源汽车的氢燃料电池电能输出控制方法和系统通过拍摄和分析汽车行驶过程的外部环境影像,确定当前行驶的路段是否为交通拥堵路段;当汽车当前行驶在交通拥堵路段时,根据汽车与其前方汽车之间的距离和前方汽车的行驶速度,确定汽车自身最高允许行驶速度,以此调整汽车的氢燃料电池电能输出量;最后根据汽车的实际负重信息,确定其可行驶距离,从而对适应性提示司机对汽车进行加气,其通过对新能源汽车的实际行驶环境和实际负重信息,调整内部氢燃料电池的串联状态以使氢燃料电池能够适应性地输出不同电量,这样能够优化氢燃料电池的电能输出效率和提升新能源汽车的行驶里程。From the contents of the above-mentioned embodiments, it can be seen that the hydrogen fuel cell electric energy output control method and system based on new energy vehicles determine whether the road section currently driving is a road section with traffic congestion by taking and analyzing the external environment images of the vehicle driving process; In traffic jams, according to the distance between the car and the car in front and the speed of the car in front, determine the maximum allowable speed of the car itself, so as to adjust the power output of the hydrogen fuel cell of the car; finally, according to the actual load information of the car, Determine its travelable distance, so as to remind the driver to refuel the car adaptively. It adjusts the series state of the internal hydrogen fuel cell through the actual driving environment and actual load information of the new energy vehicle so that the hydrogen fuel cell can be adaptively Output different power, which can optimize the power output efficiency of hydrogen fuel cells and improve the mileage of new energy vehicles.
显然,本领域的技术人员可以对本发明进行各种改动和变型而不脱离本发明的精神和范围。这样,倘若本发明的这些修改和变型属于本发明权利要求及其等同技术的范围之内,则本发明也意图包含这些改动和变型在内。Obviously, those skilled in the art can make various changes and modifications to the present invention without departing from the spirit and scope of the present invention. Thus, if these modifications and variations of the present invention fall within the scope of the claims of the present invention and their equivalent technologies, the present invention also intends to include these modifications and variations.
Claims (8)





Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202210049459.5A CN114312491B (en) | 2022-01-17 | 2022-01-17 | Hydrogen fuel cell electric energy output control method and system for new energy automobile |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202210049459.5A CN114312491B (en) | 2022-01-17 | 2022-01-17 | Hydrogen fuel cell electric energy output control method and system for new energy automobile |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN114312491A CN114312491A (en) | 2022-04-12 |
| CN114312491B true CN114312491B (en) | 2023-04-07 |
Family
ID=81028741
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202210049459.5A Expired - Fee Related CN114312491B (en) | 2022-01-17 | 2022-01-17 | Hydrogen fuel cell electric energy output control method and system for new energy automobile |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN114312491B (en) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN115503558A (en) * | 2022-10-28 | 2022-12-23 | 浙江吉利新能源商用车集团有限公司 | Energy management method and device for fuel cell, vehicle and computer storage medium |
| CN120439815A (en) * | 2025-05-21 | 2025-08-08 | 柳州城市职业学院 | AI-driven new energy vehicle power system optimization control method, system and device |
Citations (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05305839A (en) * | 1992-04-30 | 1993-11-19 | Isuzu Motors Ltd | Vehicle speed control device |
| JP2001183150A (en) * | 1999-10-15 | 2001-07-06 | Nissan Motor Co Ltd | Running pattern generator |
| JP2003095042A (en) * | 2001-09-21 | 2003-04-03 | Denso Corp | Power generation control device |
| EP1344672A1 (en) * | 2002-03-11 | 2003-09-17 | Hitachi, Ltd. | Headway control system |
| JP2010220343A (en) * | 2009-03-16 | 2010-09-30 | Toyota Motor Corp | Converter control device |
| CN102039819A (en) * | 2009-10-09 | 2011-05-04 | 罗伯特·博世有限公司 | Control device for selecting resistance characteristic curve of accelerator pedal and method thereof |
| WO2018058958A1 (en) * | 2016-09-30 | 2018-04-05 | 广州大正新材料科技有限公司 | Road vehicle traffic alarm system and method therefor |
| CN110481566A (en) * | 2018-05-14 | 2019-11-22 | 株式会社万都 | Apparatus and method for assisting driving of host vehicle |
| CN111278704A (en) * | 2018-03-20 | 2020-06-12 | 御眼视觉技术有限公司 | System and method for navigating a vehicle |
| KR20200070518A (en) * | 2018-12-07 | 2020-06-18 | 현대자동차주식회사 | Vehicle and control method for the same |
| CN112590814A (en) * | 2020-12-17 | 2021-04-02 | 上海悦充网络科技有限公司 | Vehicle automatic driving control method and system based on Internet of vehicles |
| CN213241498U (en) * | 2020-09-02 | 2021-05-18 | 广东技术师范大学 | Intelligent bus stop board system |
| CN112896172A (en) * | 2021-01-30 | 2021-06-04 | 刘孝恩 | Electric energy optimal utilization method and system for new energy automobile |
| CN113495218A (en) * | 2021-08-02 | 2021-10-12 | 武汉驰必得科技有限公司 | Method and device for monitoring effective consumption of electric quantity of new energy battery and computer storage medium |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002123894A (en) * | 2000-10-16 | 2002-04-26 | Hitachi Ltd | Probe car control method and apparatus, and traffic control system using probe car |
| JP2002371877A (en) * | 2001-06-14 | 2002-12-26 | Toyota Motor Corp | Automatic stop control device for in-vehicle internal combustion engine |
| JP6293197B2 (en) * | 2016-04-26 | 2018-03-14 | 本田技研工業株式会社 | Vehicle control system, vehicle control method, and vehicle control program |
| US20180113450A1 (en) * | 2016-10-20 | 2018-04-26 | Toyota Motor Engineering & Manufacturing North America, Inc. | Autonomous-mode traffic lane selection based on traffic lane congestion levels |
| US20180290645A1 (en) * | 2017-04-11 | 2018-10-11 | Ford Global Technologies, Llc | Autonomous vehicle constant speed control system |
| US20200353925A1 (en) * | 2019-05-08 | 2020-11-12 | Hyundai Motor Company | Vehicle and method of controlling the same |
-
2022
- 2022-01-17 CN CN202210049459.5A patent/CN114312491B/en not_active Expired - Fee Related
Patent Citations (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05305839A (en) * | 1992-04-30 | 1993-11-19 | Isuzu Motors Ltd | Vehicle speed control device |
| JP2001183150A (en) * | 1999-10-15 | 2001-07-06 | Nissan Motor Co Ltd | Running pattern generator |
| JP2003095042A (en) * | 2001-09-21 | 2003-04-03 | Denso Corp | Power generation control device |
| EP1344672A1 (en) * | 2002-03-11 | 2003-09-17 | Hitachi, Ltd. | Headway control system |
| JP2010220343A (en) * | 2009-03-16 | 2010-09-30 | Toyota Motor Corp | Converter control device |
| CN102039819A (en) * | 2009-10-09 | 2011-05-04 | 罗伯特·博世有限公司 | Control device for selecting resistance characteristic curve of accelerator pedal and method thereof |
| WO2018058958A1 (en) * | 2016-09-30 | 2018-04-05 | 广州大正新材料科技有限公司 | Road vehicle traffic alarm system and method therefor |
| CN111278704A (en) * | 2018-03-20 | 2020-06-12 | 御眼视觉技术有限公司 | System and method for navigating a vehicle |
| CN110481566A (en) * | 2018-05-14 | 2019-11-22 | 株式会社万都 | Apparatus and method for assisting driving of host vehicle |
| KR20200070518A (en) * | 2018-12-07 | 2020-06-18 | 현대자동차주식회사 | Vehicle and control method for the same |
| CN213241498U (en) * | 2020-09-02 | 2021-05-18 | 广东技术师范大学 | Intelligent bus stop board system |
| CN112590814A (en) * | 2020-12-17 | 2021-04-02 | 上海悦充网络科技有限公司 | Vehicle automatic driving control method and system based on Internet of vehicles |
| CN112896172A (en) * | 2021-01-30 | 2021-06-04 | 刘孝恩 | Electric energy optimal utilization method and system for new energy automobile |
| CN113495218A (en) * | 2021-08-02 | 2021-10-12 | 武汉驰必得科技有限公司 | Method and device for monitoring effective consumption of electric quantity of new energy battery and computer storage medium |
Non-Patent Citations (1)
| Title |
|---|
| 张帅 ; 钱欣瑞 ; 史彬 ; 鄢烈祥.质子交换膜燃料电池系统多目标优化.《计算机与应用化学》.2018,第35卷(第1期),全文. * |
Also Published As
| Publication number | Publication date |
|---|---|
| CN114312491A (en) | 2022-04-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US9834199B2 (en) | Apparatus and method for controlling battery state of charge in hybrid electric vehicle | |
| CN113135100B (en) | Vehicle charging reminding method and device, storage medium and vehicle | |
| US11443563B2 (en) | Driving range based on past and future data | |
| CN110641397B (en) | Electric vehicle driving feedback system based on combination of driving data and map prediction | |
| US8874358B2 (en) | Route guidance device, method, and program | |
| US8417401B2 (en) | Map display apparatus, map display method, and computer-readable tangible medium | |
| US8423273B2 (en) | Minimum energy route for a motor vehicle | |
| JP6205805B2 (en) | Vehicle destination arrival estimation device | |
| KR101417401B1 (en) | Apparatus for guiding drive-able distance of electric vehicle and method thereof | |
| US20100106401A1 (en) | Traveling guidance system, traveling guidance method, and computer program | |
| US20130079962A1 (en) | Charge control system for electric motor vehicle | |
| CN107415710B (en) | hybrid car | |
| CN114312491B (en) | Hydrogen fuel cell electric energy output control method and system for new energy automobile | |
| CN111845454B (en) | A new energy vehicle discharge monitoring and early warning system | |
| CN108663061B (en) | Electric automobile mileage estimation system and estimation method thereof | |
| CN112987639A (en) | Intelligent charging pile control system based on new energy automobile | |
| US20230117709A1 (en) | Dynamic calculation method and device of electric vehicle mass | |
| JP4668840B2 (en) | Electric vehicle energy management system | |
| JP2009220788A (en) | Hybrid vehicle | |
| CN109878506A (en) | Vehicle control system, control method for vehicle and storage medium | |
| JP6597752B2 (en) | Vehicle display device | |
| CN109668571B (en) | Pure electric garbage truck path planning method based on electric quantity prediction and intelligent energy management | |
| CN110481534A (en) | Vehicle control system, control method for vehicle and storage medium | |
| Das et al. | Eco-routing navigation systems in electric vehicles: A comprehensive survey | |
| CN115366685A (en) | Method and system for matching residual electric quantity and vehicle speed of electric vehicle |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant | ||
| CF01 | Termination of patent right due to non-payment of annual fee |
Granted publication date: 20230407 |
|
| CF01 | Termination of patent right due to non-payment of annual fee |