CN110049737B - 处置器具 - Google Patents
处置器具 Download PDFInfo
- Publication number
- CN110049737B CN110049737B CN201680091412.8A CN201680091412A CN110049737B CN 110049737 B CN110049737 B CN 110049737B CN 201680091412 A CN201680091412 A CN 201680091412A CN 110049737 B CN110049737 B CN 110049737B
- Authority
- CN
- China
- Prior art keywords
- housing
- handle
- button
- grip
- distal end
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images









Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
- A61B18/12—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating by passing a current through the tissue to be heated, e.g. high-frequency current
Landscapes
- Health & Medical Sciences (AREA)
- Surgery (AREA)
- Engineering & Computer Science (AREA)
- Life Sciences & Earth Sciences (AREA)
- Biomedical Technology (AREA)
- Molecular Biology (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Plasma & Fusion (AREA)
- Physics & Mathematics (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Otolaryngology (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Surgical Instruments (AREA)
- Massaging Devices (AREA)
Abstract
处置器具(1)具有外壳(3)。在安装于外壳(3)的轴(2)的顶端设有末端执行器(5)。手术操作者将外壳(3)的把手(22)夹在右手(H0)的手掌(H1)和拇指(F1)之间来握持,并将中指(F3)、无名指(F4)及小指(F5)勾挂于手柄(27)。能够通过转动手柄(27)来开闭末端执行器(5)的把持片(12、13)。食指(F2)的指尖抵接于在外壳(3)的第1外表面(31A)形成的隆起部(45A)。通过这样做,能够防止由食指(F2)错误地按压安装在第1外表面(31A)的第1侧部按钮(41A)。在用拇指(F1)按压在外壳(3)的第2外表面(31B)安装的第2侧部按钮(41B)时,处置器具(1)以第1工作模式进行工作。在用食指(F2)按压在外壳(3)的顶端外表面(33)安装的正面按钮(43)时,处置器具(1)以第2工作模式进行工作。
Description
技术领域
本发明涉及一种设有能够保持的外壳且手柄能够相对于外壳的把手移动的处置器具。
背景技术
在US2015/0282874A1中公开了一种具备能够保持的外壳的处置器具。在该处置器具中,轴从顶端侧安装于外壳,外壳包括沿着轴的长度轴线延伸设置的外壳主体和从外壳向与长度轴线交叉的方向延伸设置的把手。此外,在外壳安装有手柄,手柄位于比把手靠顶端侧的位置。通过使手柄相对于把手向顶端侧移动或者向基端侧移动,从而手柄相对于把手张开或者闭合。由此,例如在设于轴的顶端部的末端执行器中,一对把持片之间张开或者闭合,能够在把持片之间把持处置对象。
在利用US2015/0282874A1这样的处置器具进行处置的情况下,使右手或左手的手掌从基端侧抵接于把手。而且,在外壳的宽度方向上将把手夹在手掌和拇指之间,保持外壳。此外,食指、中指、无名指及小指中的至少1根手指勾挂于手柄。而且,与来自勾挂的手指的操作力相对应,手柄相对于把手向基端侧移动或者向顶端侧移动,手柄相对于把手闭合或者张开。此时,寻求稳定地保持外壳。
发明内容
本发明的目的在于,提供一种手柄位于比外壳的把手靠顶端侧的位置、能稳定地保持外壳的处置器具。
为了达到所述目的,本发明的一个技术方案的处置器具包括:轴,其具有基端和顶端,该轴从所述基端沿着长度轴线延伸设置到所述顶端;外壳,其供所述轴安装,该外壳包括沿着所述长度轴线延伸设置的外壳主体和从所述外壳主体向与所述长度轴线交叉的方向延伸设置的把手,所述外壳具有第1外表面和朝向与所述第1外表面相反的那一侧的第2外表面;手柄,其设在比所述把手靠顶端侧的部位,该手柄能够沿着所述第1外表面和所述第2外表面之间的虚拟平面即运动面相对于所述把手向基端侧移动或者向所述顶端侧移动;以及隆起部,其在所述第1外表面向与所述运动面交叉的方向隆起,并位于比所述把手靠所述顶端侧的位置且位于所述长度轴线和所述手柄之间,该隆起部距所述外壳主体的顶端的距离小于该隆起部距所述外壳主体的基端的距离,该隆起部距所述手柄的距离小于该隆起部距所述长度轴线的距离。
本发明的另一个技术方案的处置器具包括:轴,其具有基端和顶端,该轴从所述基端沿着长度轴线延伸设置到所述顶端;外壳,其供所述轴安装,该外壳包括沿着所述长度轴线延伸设置的外壳主体和从所述外壳主体向与所述长度轴线交叉的方向延伸设置的把手,并且所述外壳具有第1外表面和朝向与所述第1外表面相反的那一侧的第2外表面,用户的手掌以从基端侧抵接于所述把手的状态保持该外壳;手柄,其设在比所述把手靠顶端侧的部位,供食指、中指、无名指及小指中的至少1根手指勾挂,该手柄与来自勾挂的所述手指的操作力相对应地沿着所述第1外表面和所述第2外表面之间的虚拟平面即运动面相对于所述把手向所述基端侧移动或者向所述顶端侧移动;以及隆起部,其在所述第1外表面向与所述运动面交叉的方向隆起,设在所述食指和所述中指中的至少一根手指能够抵接的位置,该隆起部能够利用所述食指或者所述中指向从所述长度轴线朝向所述手柄的一侧施加按压力。
附图说明
图1是从外壳的宽度方向的一侧观看第1实施方式的处置器具的概略图。
图2是从相对于长度轴线而言与把手所处的一侧相反的那一侧观看第1实施方式的处置器具的概略图。
图3是以在外壳的宽度方向上从与图1相反的那一侧观看的状态表示第1实施方式的外壳及其附近的结构的概略图。
图4是以从顶端侧观看的状态表示第1实施方式的外壳及其附近的结构的概略图。
图5是以从基端侧观看的状态表示第1实施方式的外壳及其附近的结构的概略图。
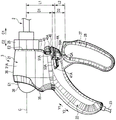
图6是表示用一只手保持着第1实施方式的外壳的状态的概略图。
图7是表示利用保持着第1实施方式的外壳的手进行在弯曲拨盘的操作的状态的概略图。
图8是从外壳的宽度方向的一侧观看第1变形例的外壳的概略图。
图9是从外壳的宽度方向的一侧观看第2变形例的外壳的概略图。
图10是从外壳的宽度方向的一侧观看第3变形例的处置器具的概略图。
具体实施方式
(第1实施方式)
参照图1~图7说明本发明的第1实施方式。图1和图2是表示本实施方式的处置器具1的图。如图1所示,处置器具1具备轴(护套)2,轴2作为中心轴线而具有长度轴线C。在此,将沿着长度轴线C的方向的一侧设为顶端侧(箭头C1侧),将与顶端侧相反的那一侧设为基端侧(箭头C2侧)。轴2具有基端和顶端,其从基端沿着长度轴线C延伸设置到顶端。
处置器具1具备能够保持的外壳3。轴2从顶端侧安装于外壳3。此外,在轴2的顶端部设有末端执行器5。在轴2中,朝向外壳3的一侧成为基端侧,朝向末端执行器5的一侧成为顶端侧。轴2能够绕长度轴线C相对于外壳3旋转。
末端执行器5能够与轴2一起绕长度轴线C相对于外壳3旋转。通过末端执行器5绕长度轴线C旋转,从而末端执行器5绕长度轴线C的角度位置发生变化。此外,在本实施方式中,末端执行器5能够相对于轴2(长度轴线C)弯曲。末端执行器5的弯曲方向(箭头B1和箭头B2所示的方向)与长度轴线C交叉(大致垂直)。末端执行器5包括中继构件11、第1把持片12及第2把持片13。中继构件11以能够相对于轴2弯曲的方式安装在轴2的顶端。因此,在轴2和中继构件11之间形成有弯曲关节15。此外,在末端执行器5中,一对把持片12、13之间能够开闭。把持片12、13的开闭方向(箭头X1和箭头X2所示的方向)与长度轴线C交叉(大致垂直),而且与末端执行器5的弯曲方向交叉(大致垂直)。
在此,在一个实施例中,把持片12、13中的一个把持片与中继构件11一体或者固定于中继构件11,另一个把持片以能够转动的方式安装于中继构件11。此外,在另一个实施例中,把持片12、13这两者以能够转动的方式安装于中继构件11。并且,在又一个实施例中,从中继构件11的内部朝向顶端侧延伸设置杆构件(未图示),由杆构件中的、从中继构件11向顶端侧突出的突出部分形成把持片12、13中的一个把持片。而且,把持片12、13中的另一个把持片以能够转动的方式安装于中继构件11。
外壳3具备沿着轴2的长度轴线C延伸设置的外壳主体21。外壳主体21具有基端E1和顶端E2。外壳主体21以其中心轴线与长度轴线C同轴或者大致同轴的状态从基端E1延伸设置到顶端E2。此外,外壳3具备从外壳主体21向与长度轴线交叉的方向延伸设置的把手(固定手柄)22。在本实施方式中,把手22与外壳主体21一体地形成。在外壳3连接线缆23的一端。在本实施方式中,例如在把手22中的、相对于外壳主体21(长度轴线C)而言的远端侧的端部连接线缆23的一端。线缆23的另一端连接于能量控制装置(未图示)。
此外,在本实施方式中,在外壳主体21的顶端侧安装作为旋转操作构件的旋转旋钮25。轴2从顶端侧插入到旋转旋钮25的内部和外壳主体21的内部,并从顶端侧安装于外壳3。旋转旋钮25相对于轴2固定,其能够与轴2和末端执行器5一起绕长度轴线C相对于外壳3旋转。在作为旋转操作构件的旋转旋钮25能够输入使轴2和末端执行器5绕长度轴线C进行旋转动作的操作。即,在施加使旋转旋钮25绕长度轴线C旋转的操作力时,轴2和末端执行器5绕长度轴线C相对于外壳3进行旋转动作。
图3~图5是表示外壳3和外壳3附近的结构的图。在此,将与长度轴线C交叉(大致垂直)且与把手22的延伸设置方向(箭头Y1和箭头Y2所示的方向)交叉的(大致垂直的)方向设为外壳3的宽度方向(箭头W1和箭头W2所示的方向)。图1表示从宽度方向的一侧观看外壳3的状态,图3表示从与图1相反的那一侧观看外壳3的状态。此外,图2表示从相对于长度轴线C而言与把手22所处的一侧相反的那一侧观看外壳3的状态。并且,图4表示从顶端侧观看外壳3的状态,图5表示从基端侧观看外壳3的状态。
如图1~图5所示,外壳3具有朝向宽度方向的一侧(箭头W1侧)的第1外表面(第1侧部外表面)31A和朝向与第1外表面31A相反的那一侧的第2外表面(第2侧部外表面)31B。此外,外壳3具有在外表面31A、31B之间延伸设置的顶端外表面33、基端外表面35及中继外表面36。顶端外表面33朝向顶端侧,形成外壳主体21的顶端E2。此外,基端外表面35朝向基端侧,形成外壳主体21的基端E1。此外,中继外表面36朝向相对于长度轴线C而言与把手22所处的一侧相反的那一侧,形成外壳主体21中的与把手22所处的一侧相反的那一侧的端。
手柄(可动手柄)27以能够转动的方式安装于外壳3。在此,限定在宽度方向上作为第1外表面31A和第2外表面31B之间的虚拟平面的运动面T。运动面T是与宽度方向大致垂直的面,例如是外壳3的宽度方向上的中央面。因此,与运动面T交叉的(大致垂直的)方向与外壳3的宽度方向一致。手柄27通过相对于外壳3转动而沿着运动面T相对于把手22向基端侧移动或者向顶端侧移动。即,手柄27能够相对于把手22开闭。手柄27具备用于施加使手柄27相对于把手22张开或者闭合的操作力的施力部28。手柄27的施力部28设在比把手22靠顶端侧的部位。因此,通过手柄27向顶端侧移动,从而手柄27相对于把手22进行张开动作,通过手柄27向基端侧移动,从而手柄27相对于把手22进行闭合动作。此外,手柄27的施力部28位于相对于长度轴线C而言把手22所处的一侧的位置。由于手柄27是前述那样的结构,因此在本实施方式中,处置器具1成为所谓的手枪型的处置器具。
通过由施力部28施加操作力,手柄27相对于把手22沿着运动面T移动,从而在轴2的内部延伸设置的可动构件(未图示)相对于轴2和外壳3沿着长度轴线C移动。由此,把持片12、13中的至少一个把持片相对于中继构件11转动,把持片12、13之间张开或者闭合。因而,在末端执行器5中,能够在把持片12、13之间把持生物体组织等处置对象。
在外壳3作为弯曲操作构件安装弯曲拨盘(弯曲操作构件)38。能够利用弯曲拨盘38输入使末端执行器5相对于轴2进行弯曲动作的操作。例如通过使弯曲拨盘38转动等利用弯曲拨盘(弯曲操作构件)38输入操作,从而在轴2的内部延伸设置的弯曲操作线(未图示)相对于轴2和外壳3沿着长度轴线C移动。由此,末端执行器5利用弯曲关节15相对于轴2弯曲。在本实施方式中,在作为基端外表面35的一部分的、外壳主体21的基端面安装弯曲拨盘38。而且,弯曲拨盘38的旋转轴线与长度轴线C交叉(大致垂直)。优选的是,弯曲拨盘38设在长度轴线C通过的位置。另外,弯曲拨盘38既可以能够与轴2、末端执行器5及旋转旋钮25一起绕长度轴线C相对于外壳3旋转,也可以不与轴2、末端执行器5及旋转旋钮25一起绕长度轴线C旋转。此外,弯曲操作构件不必是弯曲拨盘38,也可以取而代之设有操作杆等作为弯曲操作构件。
在外壳3中,在第1外表面31A安装第1侧部按钮(操作构件)41A,在第2外表面31B安装第2侧部按钮(操作构件)41B。此外,在顶端外表面33安装正面按钮(操作构件)43。侧部按钮41A、41B及正面按钮43设在外壳主体21的长度轴线C和手柄27的施力部28之间。此外,侧部按钮41A、41B及正面按钮43位于比把手22靠顶端侧的位置。设置正面按钮43的顶端外表面33设在比侧部按钮41A、41B靠顶端侧的部位。此外,作为弯曲操作构件的弯曲拨盘38位于比侧部按钮41A、41B靠基端侧的位置。侧部按钮41A、41B各自距手柄27的施力部28的距离L2小于侧部按钮41A、41B各自距长度轴线C的距离L1。因此,侧部按钮41A、41B在外壳主体21的长度轴线C和手柄27的施力部28之间位于接近施力部28的一侧的部位。另外,优选的是,侧部按钮41A、41B各自距外壳主体21的顶端E2的距离L4小于侧部按钮41A、41B各自距外壳主体21的基端E1的距离L3。即,优选的是,侧部按钮41A、41B在外壳主体21的基端E1和外壳主体21的顶端E2之间位于接近顶端E2的一侧的部位。
在侧部按钮41A、41B均能够输入使处置器具1以第1工作模式进行工作的操作。即,基于在第1侧部按钮41A或第2侧部按钮41B处的操作,处置器具1以第1工作模式进行工作。此外,能够在正面按钮43输入使处置器具1以与第1工作模式不同的第2工作模式进行工作的操作。即,基于在正面按钮43的操作,处置器具1以第2工作模式进行工作。在第1工作模式和第2工作模式下,分别是例如与众所周知的处置器具同样地从前述的能量控制装置(未图示)向处置器具1供给电能,生成由末端执行器5对处置对象进行的处置所使用的处置能量。然后,对在把持片12、13之间把持的处置对象赋予高频电流、超声波振动及加热器热中的任一者作为处置能量。在一个实施例中,在第1工作模式和第2工作模式中,均从能量控制装置向电动马达(未图示)供给电能,驱动电动马达。由此,卡钉穿刺于在把持片12、13之间把持的处置对象。
此外,在外壳3中,在第1外表面31A设有隆起部(第1隆起部)45A,在第2外表面31B设有隆起部(第2隆起部)45B。隆起部45A、45B各自在宽度方向上朝向外侧(远离运动面T的一侧)突出。此外,隆起部45A、45B与外壳3一体地形成。隆起部45A、45B设在比把手22靠顶端侧的部位,位于长度轴线C和手柄27的施力部28之间。另外,在与比隆起部45A、45B靠接近长度轴线C的一侧与隆起部45A、45B相邻的部位形成有收缩。即,第1外表面31A和第2外表面31B各自具有收缩部位,收缩部位形成为适合后述的拇指、食指等载置的形状。
侧部按钮41A、41B分别位于比隆起部45A、45B靠基端侧的位置。在本实施方式中,第1侧部按钮41A与隆起部45A的基端侧相邻设置,第2侧部按钮41B与隆起部45B的基端侧相邻设置。由于是前述那样的结构,因此作为弯曲操作构件的弯曲拨盘38位于比隆起部45A、45B靠基端侧的位置。
隆起部45A、45B各自距手柄27的施力部28的距离D2小于隆起部45A、45B各自距外壳主体21的长度轴线C的距离D1。因此,隆起部45A、45B在长度轴线C和手柄27的施力部28之间位于接近施力部28的一侧的部位。此外,隆起部45A、45B各自距外壳主体21的顶端E2的距离D4小于隆起部45A、45B各自距外壳主体21的基端E1的距离D3。即,隆起部45A、45B在外壳主体21的基端E1和外壳主体21的顶端E2之间位于接近顶端E2的一侧的部位。
此外,在顶端外表面33设置的正面按钮43设在比隆起部45A、45B靠接近长度轴线C的一侧的部位。此外,在本实施方式中,在顶端外表面33设有向顶端侧隆起的顶端隆起部46。顶端隆起部46与壳3一体地形成。在本实施方式中,顶端隆起部46与隆起部45A、45B之间连续。因此,在外壳3的外表面形成有从隆起部45A经过顶端隆起部46连续到隆起部45B的隆起形状。此外,顶端隆起部46以与正面按钮43相邻设置的状态形成在正面按钮43和施力部28之间。另外,在一个实施例中,也可以不设置顶端隆起部46,而是在隆起部45A、45B之间隆起形状不连续。
此外,在本实施方式中,侧部按钮41A、41B各自也在外壳3的宽度方向上朝向外侧(远离运动面T的一侧)突出。在隆起部45A中,突出端(第1位置)PA处距运动面(外壳3的宽度方向上的中央面)T的距离最大,在隆起部45B中,突出端(第1位置)PB处距运动面T的距离最大。此外,在第1侧部按钮41A中,突出端(第2位置)QA处距运动面(外壳3的宽度方向上的中央面)T的距离最大,在第2侧部按钮41B中,突出端(第2位置)QB处距运动面T的距离最大。而且,隆起部45A的突出端(第1位置)PA位于比第1侧部按钮41A的突出端(第2位置)QA靠接近长度轴线C的一侧的位置,隆起部45B的突出端(第1位置)PB位于比第2侧部按钮41B的突出端(第2位置)QB靠接近长度轴线C的一侧的位置。即,第1侧部按钮41A的突出端(第2位置)QA位于比隆起部45A的突出端(第1位置)PA靠接近施力部28的一侧的位置,第2侧部按钮41B的突出端(第2位置)QB位于比隆起部45B的突出端(第1位置)PB靠接近施力部28的一侧的位置。另外,对于隆起部(45A;45B)的突出端(PA;PB)和侧部按钮(41A;41B)的突出端(QA;QB),既可以是距运动面T的距离相同,也可以是距运动面T的距离互不相同。在从运动面T到隆起部45A的突出端PA的距离大于从运动面T到侧部按钮41A的突出端QA的距离的情况下,易于防止侧部按钮41A的误操作。
在隆起部45A设有从突出端PA朝向接近长度轴线C的一侧延伸设置的倾斜面(第1倾斜面)51A,在隆起部45B设有从突出端PB朝向接近长度轴线C的一侧延伸设置的倾斜面(第1倾斜面)51B。倾斜面51A、51B分别相对于运动面(外壳3的宽度方向上的中央面)T倾斜。而且,倾斜面51A、51B分别倾斜为随着向接近手柄27的施力部28的一侧延伸设置而在宽度方向上向外侧延伸设置的状态。
此外,在第1侧部按钮41A设有从突出端QA朝向接近长度轴线C的一侧延伸设置的倾斜面(第2倾斜面)53A,在第2侧部按钮41B设有从突出端QB朝向接近长度轴线C的一侧延伸设置的倾斜面(第2倾斜面)53B。倾斜面53A、53B分别相对于运动面(外壳3的宽度方向上的中央面)T倾斜。而且,倾斜面53A、53B分别倾斜为随着向接近手柄27的施力部28的一侧延伸设置而在宽度方向上向外侧延伸设置的状态。
倾斜面(第1倾斜面)51A作为相对于运动面T的倾斜角度而具有锐角(第1锐角)α1,倾斜面(第1倾斜面)51B作为相对于运动面T的倾斜角度而具有锐角(第1锐角)α2。此外,倾斜面(第2倾斜面)53A作为相对于运动面T的倾斜角度而具有锐角(第2锐角)β1,倾斜面(第2倾斜面)53B作为相对于运动面T的倾斜角度而具有锐角(第2锐角)β2。倾斜面51A的锐角α1大于倾斜面53A的锐角β1,倾斜面51B的锐角α2大于倾斜面53B的锐角β2。
此外,在本实施方式中,通过将第1侧部按钮41A中的倾斜面(第2倾斜面)53A向朝向手柄27的施力部28的一侧按压,从而输入使处置器具1以第1工作模式进行工作的操作。而且,通过将第2侧部按钮41B中的倾斜面(第2倾斜面)53B向朝向手柄27的施力部28的一侧按压,从而输入使处置器具1以第1工作模式进行工作的操作。
但是,在侧部按钮41A、41B各自的操作的按压方向并不限定于此。例如,在一个实施例中,通过在宽度方向上向内侧按压侧部按钮(41A;41B),从而输入使处置器具1以第1工作模式进行工作的操作。此外,也可以是,第1侧部按钮41A以能够相对于第1外表面31A绕枢支轴(未图示)的轴线转动的方式被支承,形成为操作杆型。同样,也可以是,第2侧部按钮41B以能够相对于第2外表面31B绕枢支轴(未图示)的轴线转动的方式被支承,形成为操作杆型。
此外,在本实施方式中,在第1外表面31A设有台阶55A,在第2外表面31B设有台阶55B。台阶55A设在隆起部45A和第1侧部按钮41A之间,利用台阶55A,第1侧部按钮41A的设置面在外壳3的宽度方向上位于比隆起部45A靠内侧的位置。此外,台阶55B设在隆起部45B和第2侧部按钮41B之间,利用台阶55B,第2侧部按钮41B的设置面在外壳3的宽度方向上位于比隆起部45B靠内侧的位置。
接着,对本实施方式的处置器具1的作用和效果进行说明。在使用处置器具1处置生物体组织等处置对象时,手术操作者(用户)用一只手(左手或右手)保持外壳3,将末端执行器5插入到腹腔等体腔。而且,通过使旋转旋钮(旋转操作构件)25旋转而使轴2和末端执行器5绕长度轴线C进行旋转动作,或者根据在弯曲拨盘(弯曲操作构件)38的操作而使末端执行器5相对于轴2进行弯曲动作,在体腔中调整末端执行器5的位置和姿势。而且,在将末端执行器5的位置和姿势调整为在把持片12、13之间配置有处置对象的状态之后,使手柄27相对于把手22沿着运动面T向基端侧移动,使手柄27相对于把手22闭合。由此,将把持片12、13之间闭合,在把持片12、13之间把持处置对象。在把持着处置对象的状态下,手术操作者利用侧部按钮(41A或41B)输入操作,或者利用正面按钮43输入操作。由此,处置器具1以第1工作模式或第2工作模式进行工作,像前述那样对把持的处置对象赋予处置能量(高频电流等)或者使卡钉穿刺。
图6和图7是表示用一只手(在图6和图7是右手)H0保持着处置器具1的外壳3的状态的图。在此,图6和图7是在宽度方向上从第2外表面31B所朝向的一侧观看外壳3的图。此外,图6表示保持着外壳3的手H0未对旋转旋钮25、弯曲拨盘38、侧部按钮41A、41B及正面按钮43中的任一者进行操作的状态,图7表示利用弯曲拨盘38进行操作的状态。
如图6所示,在用一只手(右手或左手)H0保持着外壳3的状态下,手掌H1从基端侧抵接于把手22。而且,食指F2、中指F3、无名指F4及小指F5中的至少1根手指勾挂于手柄27的施力部28。一般来讲,中指F3、无名指F4及小指F5勾挂于施力部28,但与手术操作者的手的大小、手术操作者的喜好以及处置时的处置器具1的姿势等相对应,有时仅是无名指F4和小指F5勾挂于施力部28,也有时是食指F2、中指F3、无名指F4及小指F5全部勾挂于施力部28。而且,通过使勾挂于施力部28的手指弯曲或者伸展,从而施加使手柄27相对于把手22沿着运动面T移动的操作力。
此外,在未利用弯曲拨盘38进行操作的状态下,把手22在外壳3的宽度方向上被夹在手掌H1和拇指F1之间。此时,拇指F1在第1外表面31A和第2外表面31B中的一个表面上(前述的收缩部位)延伸设置。而且,食指F2、中指F3、无名指F4及小指F5中的未勾挂于手柄27的手指在第1外表面31A和第2外表面31B中的另一个表面上(前述的收缩部位)延伸设置。例如在用右手(H0)保持外壳3且未利用弯曲拨盘38进行操作的情况下,拇指F1在第2外表面31B上延伸设置,食指F2在第1外表面31A上延伸设置。此外,例如在用左手(H0)保持外壳3且未利用弯曲拨盘38进行操作的情况下,拇指F1在第1外表面31A上延伸设置,食指F2在第2外表面31B上延伸设置。
在使末端执行器5绕长度轴线C旋转时,主要利用食指F2使旋转旋钮25旋转,根据手术操作者的手的大小、手术操作者的喜好等,有时利用中指F3使旋转旋钮25旋转。即,利用食指F2或者中指F3进行在旋转旋钮25的操作。此外,利用食指F2或者中指F3按压正面按钮43。即,利用食指F2或者中指F3进行在正面按钮43的操作。
侧部按钮41A、41B均由拇指F1按压。即,利用拇指F1进行在侧部按钮41A、41B各自的操作。在此,例如在用右手(H0)保持外壳3、拇指F1在第2外表面31B上延伸设置的情况下,利用第2侧部按钮41B输入操作。此外,在用左手(H0)保持外壳3、拇指F1在第1外表面31A上延伸设置的情况下,利用第1侧部按钮41A输入操作。在本实施方式中,在第1外表面31A设有第1侧部按钮41A,在第2外表面31B设有第2侧部按钮41B。因而,在用右手(H0)保持着外壳3的情况和用左手(H0)保持着外壳3的情况中的任一种情况下,都能够使处置器具1以第1工作模式进行工作。
此外,侧部按钮41A、41B各自具有倾斜面(53A;53B),在侧部按钮41A、41B中,分别通过将倾斜面(53A;53B)向朝向手柄27的施力部28的一侧按压,从而输入使处置器具1以第1工作模式进行工作的操作。在像前述那样延伸设置拇指F1的状态下,易于使拇指F1向朝向手柄27的施力部28的一侧移动。此外,在像前述那样延伸设置拇指F1的状态下,拇指F1的指尖侧部分位于比侧部按钮(41A;41B)靠接近长度轴线C的一侧的位置。因此,易于利用拇指F1的指尖侧部分对侧部按钮(41A;41B)作用向朝向施力部28的一侧的按压力。由此,易于进行使处置器具1以第1工作模式进行工作的操作。
此外,在本实施方式中,在未进行在旋转旋钮25的操作和在正面按钮43的操作的状态下,使食指F2的指尖侧部分抵接于隆起部(45A或45B)。此时,与手术操作者的手的大小、手术操作者的喜好以及处置时的处置器具1的姿势等相对应,有时也替代食指F2而使中指F3的指尖侧部分抵接于隆起部(45A或45B)。由于像前述那样配置隆起部45A,因此在用右手(H0)保持着外壳3的情况下,食指F2和中指F3中的至少一根手指能够抵接于隆起部45A。此外,由于像前述那样配置隆起部45B,因此在用左手(H0)保持着外壳3的情况下,食指F2和中指F2中的至少一根手指能够抵接于隆起部45B。
在未进行在旋转旋钮25的操作和在正面按钮43的操作的状态下,利用食指F2或者中指F3的指尖侧部分向从长度轴线C朝向手柄27的施力部28的一侧对隆起部(45A;45B)施加按压力N1。由此,在把手22产生将施加有按压力N1的隆起部(45A;45B)作为中心且朝向基端侧的旋转力矩M1。在此,在像前述那样用一只手H0保持着外壳3的状态下,手掌H1从基端侧抵接于把手22。因此,即使产生旋转力矩M1,也能够利用手掌H1抑制由旋转力矩M1引起的把手22的旋转。因而,能利用抵接于隆起部(45A;45B)的食指F2或者中指F3以及从基端侧抵接于把手22的手掌H1稳定地保持外壳3。此外,由于在旋转力矩M1的作用下把手22的基端侧按压于手掌H1,因此能够减小用手H0握持外壳3的力。因此,通过使用外壳3,从而抑制了手术操作者的疲劳的产生。
通过稳定地保持外壳3,从而易于使末端执行器5在体腔中移动,并且易于进行在手柄27、旋转旋钮25、侧部按钮41A、41B及正面按钮43各自的操作。由此,处置的作业性上升。
此外,在使末端执行器5相对于轴2弯曲时,利用拇指F1输入在弯曲拨盘(弯曲操作构件)38的操作。此时,自未进行在弯曲拨盘38的操作的状态使拇指F1较大程度地移动,进行在弯曲拨盘38的操作。即,在进行在弯曲拨盘38的操作时,需要自图6的状态向图7所示的状态地使拇指F1较大程度地移动。由于拇指F1较大程度地移动,从而在利用弯曲拨盘38进行操作的状态下,把手22在外壳3的宽度方向上未被夹在手掌H1和拇指F1之间。但是,此时,也以食指F2或者中指F3抵接于隆起部(45A;45B)且手掌H1从基端侧抵接于把手22的状态保持外壳3。因而,能像前述那样稳定地保持外壳3。由此,易于进行在弯曲拨盘38的操作。
此外,在本实施方式中,隆起部45A的突出端(第1位置)PA位于比第1侧部按钮41A的突出端(第2位置)QA靠接近长度轴线C的一侧的位置,隆起部45B的突出端(第1位置)PB位于比第2侧部按钮41B的突出端(第2位置)QB靠接近长度轴线C的一侧的位置。因此,在用右手(H0)保持着外壳3的情况下,能利用隆起部45A防止食指F2或者中指F3错误地接触第1侧部按钮41A的状况。即,能利用隆起部45A防止由食指F2或者中指F3对第1侧部按钮41A进行的误操作。此外,即使在保持外壳3的手术操作者的右手(H0)较大的情况下,也能利用隆起部45B防止拇指F1错误地接触第2侧部按钮41B的状况。即,能利用隆起部45B防止由拇指F1对第2侧部按钮41B进行的误操作。
同样,在用左手(H0)保持着外壳3的情况下,能利用隆起部45B防止食指F2或者中指F3错误地接触第2侧部按钮41B的状况。即,能利用隆起部45B防止由食指F2或者中指F3对第2侧部按钮41B进行的误操作。此外,即使在保持外壳3的手术操作者的左手(H0)较大的情况下,也能利用隆起部45A防止拇指F1错误地接触第1侧部按钮41A的状况。即,能利用隆起部45A防止由拇指F1对第1侧部按钮41A进行的误操作。
此外,在本实施方式中,隆起部45A的倾斜面51A的锐角α1大于第1侧部按钮41A的倾斜面53A的锐角β1。而且,隆起部45B的倾斜面51B的锐角α2大于第2侧部按钮41B的倾斜面53B的锐角β2。因此,进一步有效地防止分别由前述的拇指F1、食指F2及中指F3对侧部按钮(41A;41B)进行的误操作。
(变形例)
另外,在第1实施方式中,弯曲拨盘38安装在外壳主体21的基端面,但弯曲拨盘38的位置并不限于此。例如,在图8所示的第1变形例中,弯曲拨盘38安装在外壳主体21,并在第1外表面31A、第2外表面31B及中继外表面36露出到外壳3的外部。此外,弯曲拨盘38的旋转轴线与长度轴线C大致平行。另外,优选的是,弯曲拨盘38设在长度轴线C所通过的位置,更优选的是,弯曲拨盘38的旋转轴线与长度轴线C大致同轴。
在本变形例中也是,作为弯曲操作构件的弯曲拨盘38位于比隆起部45A、45B靠基端侧且比侧部按钮41A、41B靠基端侧的位置。因此,在像前述那样用一只手H0保持着外壳3的状态下,利用拇指F1进行在弯曲拨盘38的操作。
此外,在本变形例中,也与第1实施方式同样设有隆起部45A、45B。因而,与第1实施方式同样,能利用抵接于隆起部(45A;45B)的食指F2或者中指F3以及从基端侧抵接于把手22的手掌H1稳定地保持外壳3。此外,与第1实施方式同样,能利用隆起部(45A;45B)有效地防止分别由拇指F1、食指F2及中指F3对侧部按钮(41A;41B)进行的误操作。
另外,在一个变形例中,也可以是,在图8中所示的弯曲拨盘38的位置设有用于使轴2和末端执行器5绕长度轴线C旋转的旋转旋钮(25)。在该情况下,弯曲拨盘38既可以设在与第1实施方式相同的位置,也可以不设置弯曲拨盘(弯曲操作构件)38。
此外,在图9所示的第2变形例中,作为旋转操作构件的旋转旋钮25安装在外壳主体21的基端E1。在本变形例中也是,通过利用旋转旋钮25输入操作而使轴2和末端执行器5与旋转旋钮25一起绕长度轴线C相对于外壳3旋转。而且,在旋转旋钮25安装作为弯曲操作构件的弯曲拨盘38。在本变形例中,旋转旋钮25和弯曲拨盘38位于比隆起部45A、45B靠基端侧且比侧部按钮41A、41B靠基端侧的位置。因此,在像前述那样用一只手H0保持着外壳3的状态下,利用拇指F1进行在旋转旋钮25和弯曲拨盘38各自的操作。
在本变形例中,也与第1实施方式同样设有隆起部45A、45B。因而,与第1实施方式同样,能利用抵接于隆起部(45A;45B)的食指F2或者中指F3以及从基端侧抵接于把手22的手掌H1稳定地保持外壳3。例如,在本变形例中,在利用旋转旋钮25进行操作的状态和利用弯曲拨盘38进行操作的状态下,均是把手22在外壳3的宽度方向上未被夹在手掌H1和拇指F1之间。但是,此时,也以食指F2或者中指F3抵接于隆起部(45A;45B)且手掌H1从基端侧抵接于把手22的状态保持外壳3。因而,能像前述那样稳定地保持外壳3,易于进行在旋转旋钮25和弯曲拨盘38各自的操作。此外,在本变形例中,也与第1实施方式同样,能利用隆起部(45A;45B)有效地防止分别由拇指F1、食指F2及中指F3对侧部按钮(41A;41B)进行的误操作。
此外,在图10所示的第3变形例中,未设置作为弯曲操作构件的弯曲拨盘38,而是设有振子单元60。振子单元60从基端侧安装于外壳主体21。振子单元60包括振子壳61和设在振子壳61的内部的超声波振子(未图示)。此外,在本变形例中,在振子壳61连接线缆23的一端。在本变形例中,由振动传递性较高的材料形成的杆构件62贯穿于轴2。而且,在外壳主体21的内部,在超声波振子的顶端侧连接杆构件62。在本变形例中,杆构件62中的自轴2向顶端侧突出的部位成为第1把持片12。而且,第2把持片13以能够转动的方式安装在轴2的顶端部。此外,在本变形例中,末端执行器5由把持片12、13形成,其不相对于轴2(长度轴线C)进行弯曲动作。
在本变形例中,也与第1实施方式同样设有隆起部45A、45B。因而,与第1实施方式同样,能利用抵接于隆起部(45A;45B)的食指F2或者中指F3以及从基端侧抵接于把手22的手掌H1稳定地保持外壳3。此外,与第1实施方式同样,能利用隆起部(45A;45B)有效地防止分别由拇指F1、食指F2及中指F3对侧部按钮(41A;41B)进行的误操作。
另外,在一个变形例中,也可以是,在既未设置弯曲操作构件(38)也未设置振子单元(60)的结构中设有前述的隆起部(45A;45B)。此外,在另一个变形例中,也可以是,在未设置旋转操作构件(25)的结构中设有前述的隆起部(45A;45B)。
在前述的实施方式等中,在外壳(3)的外表面(31A;31B)设有隆起部(45A;45B),隆起部(45A;45B)向与手柄(27)的运动面(T)交叉的方向隆起。隆起部(45A;45B)位于比把手(22)靠顶端侧的位置且位于长度轴线(C)和手柄(27)之间。从隆起部(45A;45B)到外壳主体(21)的顶端(E2)的距离(D4)小于从隆起部(45A;45B)到外壳主体(21)的基端(E1)的距离(D3),从隆起部(45A;45B)到手柄(27)的距离(D2)小于从隆起部(45A;45B)到长度轴线(C)的距离(D1)。
以上,对本发明的实施方式等进行了说明,但本发明并不限于前述的实施方式等,能够在不脱离发明的主旨的前提下进行各种变形是不言而喻的。
Claims (15)
1.一种处置器具,其中,
该处置器具包括:
轴,其具有基端和顶端,该轴从所述基端沿着长度轴线延伸设置到所述顶端;
外壳,其供所述轴安装,该外壳包括沿着所述长度轴线延伸设置的外壳主体和从所述外壳主体向与所述长度轴线交叉的方向延伸设置的把手,所述外壳具有第1外表面和朝向与所述第1外表面相反的那一侧的第2外表面;
手柄,其设在比所述把手靠顶端侧的部位,该手柄能够沿着所述第1外表面和所述第2外表面之间的虚拟平面即运动面相对于所述把手向基端侧移动或者向所述顶端侧移动;以及
隆起部,其在所述第1外表面向与所述运动面交叉的方向隆起,位于比所述把手靠所述顶端侧的位置且位于所述长度轴线和所述手柄之间,该隆起部距所述外壳主体的顶端的距离小于该隆起部距所述外壳主体的基端的距离,该隆起部距所述手柄的距离小于该隆起部距所述长度轴线的距离,
在所述外壳的外表面设有侧部按钮,该侧部按钮与所述隆起部的基端侧相邻,
所述侧部按钮在所述第1外表面包括第1侧部按钮,
所述隆起部具有第1倾斜面,该第1倾斜面相对于所述运动面倾斜为随着向接近所述手柄的一侧延伸设置而在与所述运动面交叉的所述方向上向外侧延伸设置的状态,
所述第1侧部按钮具有第2倾斜面,该第2倾斜面相对于所述运动面倾斜为随着向接近所述手柄的一侧延伸设置而在与所述运动面交叉的所述方向上向外侧延伸设置的状态,
作为所述第1倾斜面相对于所述运动面的倾斜角度的第1锐角大于作为所述第2倾斜面相对于所述运动面的倾斜角度的第2锐角。
2.根据权利要求1所述的处置器具,其中,
所述第1侧部按钮设在比所述隆起部靠所述基端侧且比所述把手靠所述顶端侧的部位,能够输入用于使所述处置器具进行工作的操作,该第1侧部按钮距所述手柄的距离小于该第1侧部按钮距所述长度轴线的距离。
3.根据权利要求2所述的处置器具,其中,
所述隆起部中的、在与所述运动面交叉的所述方向上距所述运动面的距离最大的第1位置位于比所述第1侧部按钮中的、在与所述运动面交叉的所述方向上距所述运动面的距离最大的第2位置靠接近所述长度轴线的一侧的位置。
4.根据权利要求2所述的处置器具,其中,
在所述第1侧部按钮中,通过所述第2倾斜面向朝向所述手柄的一侧按压而输入使所述处置器具进行工作的所述操作。
5.根据权利要求2所述的处置器具,其中,
所述外壳具有顶端外表面,该顶端外表面在所述第1外表面和所述第2外表面之间以朝向所述顶端侧的状态延伸设置,设在比所述第1侧部按钮靠所述顶端侧的部位,
所述处置器具还包括正面按钮,该正面按钮在所述顶端外表面设在比所述隆起部靠接近所述长度轴线的一侧的部位,能够输入用于使所述处置器具进行工作的操作。
6.根据权利要求1所述的处置器具,其中,
所述处置器具还具有第2隆起部,该第2隆起部在所述第2外表面向与所述运动面交叉的方向隆起,位于比所述把手靠所述顶端侧的位置且位于所述长度轴线和所述手柄之间,该第2隆起部距所述外壳主体的顶端的距离小于该第2隆起部距所述外壳主体的基端的距离,该第2隆起部距所述手柄的距离小于该第2隆起部距所述长度轴线的距离。
7.根据权利要求6所述的处置器具,其中,
所述侧部按钮还包括第2侧部按钮,该第2侧部按钮设在所述第2外表面,能够输入用于使所述处置器具进行工作的操作。
8.根据权利要求7所述的处置器具,其中,
所述第2侧部按钮设在比所述第2隆起部靠所述基端侧且比所述把手靠所述顶端侧的部位,该第2侧部按钮距所述手柄的距离小于该第2侧部按钮距所述长度轴线的距离。
9.根据权利要求8所述的处置器具,其中,
所述第2隆起部中的、在与所述运动面交叉的所述方向上距所述运动面的距离最大的第3位置位于比所述第2侧部按钮中的、在与所述运动面交叉的所述方向上距所述运动面的距离最大的第4位置靠接近所述长度轴线的一侧的位置。
10.根据权利要求8所述的处置器具,其中,
所述第2隆起部具有第3倾斜面,该第3倾斜面相对于所述运动面倾斜为随着向接近所述手柄的一侧延伸设置而在与所述运动面交叉的所述方向上向外侧延伸设置的状态,
所述第2侧部按钮具有第4倾斜面,该第4倾斜面相对于所述运动面倾斜为随着向接近所述手柄的一侧延伸设置而在与所述运动面交叉的所述方向上向外侧延伸设置的状态,
作为所述第3倾斜面相对于所述运动面的倾斜角度的第3锐角大于作为所述第4倾斜面相对于所述运动面的倾斜角度的第4锐角。
11.根据权利要求10所述的处置器具,其中,
在所述第2侧部按钮中,通过所述第4倾斜面向朝向所述手柄的一侧按压而输入使所述处置器具进行工作的所述操作。
12.根据权利要求1所述的处置器具,其中,
该处置器具还包括:
末端执行器,其设在所述轴的顶端部;以及
操作构件,其安装在所述外壳的所述外壳主体,并且设在比所述隆起部靠基端侧的部位,能够输入用于使所述末端执行器进行动作的操作。
13.根据权利要求12所述的处置器具,其中,
所述轴的所述长度轴线通过所述操作构件。
14.根据权利要求1所述的处置器具,其中,
与所述运动面交叉的方向与所述外壳的宽度方向一致,该宽度方向与所述长度轴线交叉且与所述把手的延伸设置方向交叉,
所述第1外表面朝向所述外壳的所述宽度方向的一侧。
15.一种处置器具,其中,
该处置器具包括:
轴,其具有基端和顶端,该轴从所述基端沿着长度轴线延伸设置到所述顶端;
外壳,其供所述轴安装,该外壳包括沿着所述长度轴线延伸设置的外壳主体和从所述外壳主体向与所述长度轴线交叉的方向延伸设置的把手,并且所述外壳具有第1外表面和朝向与所述第1外表面相反的那一侧的第2外表面,用户的手掌以从基端侧抵接于所述把手的状态保持该外壳;
手柄,其设在比所述把手靠顶端侧的部位,供食指、中指、无名指及小指中的至少1根手指勾挂,该手柄与来自勾挂的所述手指的操作力相对应地沿着所述第1外表面和所述第2外表面之间的虚拟平面即运动面相对于所述把手向所述基端侧移动或者向所述顶端侧移动;以及
隆起部,其在所述第1外表面向与所述运动面交叉的方向隆起,设在所述食指和所述中指中的至少一根手指能够抵接的位置,该隆起部能够利用所述食指或者所述中指向从所述长度轴线朝向所述手柄的一侧施加按压力,
在所述外壳的外表面设有侧部按钮,该侧部按钮与所述隆起部的基端侧相邻,
所述侧部按钮在所述第1外表面包括第1侧部按钮,
所述隆起部具有第1倾斜面,该第1倾斜面相对于所述运动面倾斜为随着向接近所述手柄的一侧延伸设置而在与所述运动面交叉的所述方向上向外侧延伸设置的状态,
所述第1侧部按钮具有第2倾斜面,该第2倾斜面相对于所述运动面倾斜为随着向接近所述手柄的一侧延伸设置而在与所述运动面交叉的所述方向上向外侧延伸设置的状态,
作为所述第1倾斜面相对于所述运动面的倾斜角度的第1锐角大于作为所述第2倾斜面相对于所述运动面的倾斜角度的第2锐角。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2016/086028 WO2018104995A1 (ja) | 2016-12-05 | 2016-12-05 | 処置具 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN110049737A CN110049737A (zh) | 2019-07-23 |
| CN110049737B true CN110049737B (zh) | 2022-06-14 |
Family
ID=62490934
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201680091412.8A Active CN110049737B (zh) | 2016-12-05 | 2016-12-05 | 处置器具 |
Country Status (3)
| Country | Link |
|---|---|
| JP (1) | JP6643504B2 (zh) |
| CN (1) | CN110049737B (zh) |
| WO (1) | WO2018104995A1 (zh) |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN101371797A (zh) * | 2007-08-24 | 2009-02-25 | 奥林巴斯医疗株式会社 | 外科用手术装置 |
| CN101883531A (zh) * | 2007-10-05 | 2010-11-10 | 伊西康内外科公司 | 人体工程学外科手术器械 |
| WO2016152306A1 (ja) * | 2015-03-24 | 2016-09-29 | オリンパス株式会社 | 医療処置具 |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5582615A (en) * | 1995-10-30 | 1996-12-10 | Pilling Weck, Incorporated | Handle for surgical clip applicator systems |
| US20090090763A1 (en) * | 2007-10-05 | 2009-04-09 | Tyco Healthcare Group Lp | Powered surgical stapling device |
| ATE534338T1 (de) * | 2006-10-13 | 2011-12-15 | Terumo Corp | Manipulator |
| JP4879367B2 (ja) * | 2009-12-04 | 2012-02-22 | オリンパスメディカルシステムズ株式会社 | 手持式無線内視鏡 |
| EP2946737A1 (en) * | 2012-03-19 | 2015-11-25 | Olympus Medical Systems Corp. | Grasping treatment device |
| US9326788B2 (en) * | 2012-06-29 | 2016-05-03 | Ethicon Endo-Surgery, Llc | Lockout mechanism for use with robotic electrosurgical device |
-
2016
- 2016-12-05 JP JP2018555330A patent/JP6643504B2/ja active Active
- 2016-12-05 CN CN201680091412.8A patent/CN110049737B/zh active Active
- 2016-12-05 WO PCT/JP2016/086028 patent/WO2018104995A1/ja not_active Ceased
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN101371797A (zh) * | 2007-08-24 | 2009-02-25 | 奥林巴斯医疗株式会社 | 外科用手术装置 |
| CN101883531A (zh) * | 2007-10-05 | 2010-11-10 | 伊西康内外科公司 | 人体工程学外科手术器械 |
| WO2016152306A1 (ja) * | 2015-03-24 | 2016-09-29 | オリンパス株式会社 | 医療処置具 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6643504B2 (ja) | 2020-02-12 |
| JPWO2018104995A1 (ja) | 2019-08-08 |
| WO2018104995A1 (ja) | 2018-06-14 |
| CN110049737A (zh) | 2019-07-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN107106251B (zh) | 机械手 | |
| WO2017043128A1 (ja) | 医療処置具 | |
| US10980559B2 (en) | Treatment instrument | |
| JP6626969B2 (ja) | 処置具 | |
| CN109475363B (zh) | 把持处置器具和制造方法 | |
| CN105612032B (zh) | 机械手系统的控制方法和机械手系统 | |
| US11000302B2 (en) | Grasping treatment instrument | |
| CN110049737B (zh) | 处置器具 | |
| US20170128095A1 (en) | Treatment instrument | |
| CN107848106A (zh) | 操纵器系统 | |
| US11109877B2 (en) | Treatment instrument that includes an operation dial | |
| US20190090939A1 (en) | Treatment tool | |
| US20190350643A1 (en) | Surgical device | |
| WO2017208399A1 (ja) | 処置具 | |
| JP2009119219A (ja) | スライド式鑷子 | |
| CN109414275B (zh) | 处置器具 | |
| JPWO2016152306A1 (ja) | 医療処置具 | |
| JP6839548B2 (ja) | 内視鏡 | |
| WO2018179042A1 (ja) | 手術装置 | |
| JPH0584301U (ja) | 内視鏡 | |
| JPH0410808B2 (zh) |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |