以上説明した第2の従来例においては、運転者がステアリング操作部材を操作する操舵角に基づき、前記モータを用いることにより、車輪の転舵角が制御される。すなわち、この従来例においては、運転者のステアリング操作に依存して車輪の転舵角が制御されるようになっているのである。
これに対し、本発明者らは、前記モータを有効に利用することにより、運転者のステアリング操作に依存しないで車輪の転舵角を制御するアクティブ操舵について研究を行った。その結果、本発明者らは、アクティブ操舵が実行されて転舵機構の作動力が変化すると、その変化がステアリング操作部材を介して運転者に伝達されてしまうことに気が付いた。すなわち、アクティブ操舵に起因した操舵反力の変化が発生してしまうことに気が付いたのである。そのため、アクティブ操舵が実行されると、運転者が違和感を感じてしまう可能性がある。
この可能性は特に、運転者がステアリング操作部材を同じ状態に保持する保舵状態においてアクティブ操舵が実行される場合に顕著となる傾向がある。なぜなら、操舵角が過渡的である状態においては、そもそも操舵反力が操舵角と共に変化するから、操舵反力の全変化量のうちアクティブ操舵に起因した変化分が他の変化分から区別し難いのに対し、保舵状態においては、そもそも操舵反力が定常的であるから、アクティブ操舵が実行されて操舵反力が変化すると、運転者はその変化を容易に感じ取ることができるからである。
以上説明した知見に基づき、本発明は、運転者がステアリング操作部材を操作する操舵速度と、車輪を転舵するために変位させられる可動部材の変位速度との比率をモータによって変更可能な車両用操舵装置において、運転者のステアリング操作に依存しないで車輪の転舵角を変化させるアクティブ操舵を運転者に与える違和感を軽減しつつ実行することを課題としてなされたものである。
本発明によって下記の各態様が得られる。各態様は、項に区分し、各項には番号を付し、必要に応じて他の項の番号を引用する形式で記載する。これは、本発明が採用し得る技術的特徴の一部およびそれの組合せの理解を容易にするためであり、本発明が採用し得る技術的特徴およびそれの組合せが以下の態様に限定されると解釈されるべきではない。すなわち、下記の態様には記載されていないが本明細書には記載されている技術的特徴を本発明の技術的特徴として適宜抽出して採用することは妨げられないと解釈すべきである。
さらに、各項を他の項の番号を引用する形式で記載することが必ずしも、各項に記載の技術的特徴を他の項に記載の技術的特徴から分離させて独立させることを妨げることを意味するわけではなく、各項に記載の技術的特徴をその性質に応じて適宜独立させることが可能であると解釈されるべきである。
(1)運転者によるステアリング操作部材のステアリング操作に基づいて車輪の転舵角を変化させて車両を操舵する車両用操舵装置であって、
当該車両用操舵装置が、当該車両用操舵装置の内部における摩擦力の変化に起因する第1変化と、前記車輪のタイヤと路面との間の摩擦力の変化に起因する第2変化とが重畳的に前記ステアリング操作部材から運転者に作用する操舵反力に発生する操舵特性を有しており、
第1可動部材によって前記車両を転舵する転舵機構と、
前記第1可動部材を駆動し得るモータにより、運転者が前記ステアリング操舵部材を操作する操舵速度と前記第1可動部材の変位速度との比率を変更する比率変更機構と、
運転者が前記ステアリング操作部材に加える操舵トルクを軽減するためのアシストトルクを当該車両用操舵装置に付与するアシスト機構と、
それら比率変更機構とアシスト機構とを電気的に制御するコントローラであって、前記ステアリング操作に依存しないで前記比率変更機構を介して前記転舵角を変化させるアクティブ操舵と、そのアクティブ操舵の実行時に、前記操舵反力に発生する前記第1変化が抑制されるように前記操舵反力を前記アシスト機構を介して制御する操舵反力制御とを行うものと
を含む車両用操舵装置。
この装置によれば、運転者のステアリング操作に依存しない自動操舵すなわちアクティブ操舵が行われる。このアクティブ操舵は、例えば、車両安定性を向上させるために、カウンタステアを自動的に行うために実行したり、各車輪の横スリップ角の適正化によって各車輪の横力を適正化して車両のヨー変位を制御するために実行することが可能である。
さらに、この装置によれば、アクティブ操舵の実行時に、アシスト機構を利用して操舵反力が制御される。ここで、車両用操舵装置においては、例えば、転舵機構によって代表されるように、相互に力を伝達すべき複数の部材(例えば、ラックとピニオン、フェースギアとピニオン、一対のギア)がそれぞれの接触面において相互に押し付けられる。そのため、それら複数の部材の接触面間に摩擦力(以下、「部材間摩擦力」という)が存在する。そして、この部材間摩擦力の大きさまたは向きが変化すると、その変化が直接または間接にステアリング操作部材を介して運転者に伝達され、その結果、その変化が運転者に操舵反力の変化として認識されてしまう。これに対し、この装置によれば、アクティブ操舵の実行時に、前記部材間摩擦力に相当する内部における摩擦力の変化に起因する第1変化に応じた操舵反力の変化分を補償するトルクがアシスト機構によって発生させられる。
したがって、この装置によれば、アシスト機構がそもそも当該装置に搭載されている場合には、アクティブ操舵中に操舵反力を制御するために専用のハードウエアを当該装置に搭載することが不可欠ではなくなる。
本項における「転舵機構」は、例えば、ラックとピニオンとが噛み合ったラックアンドピニオン方式を採用することが可能であり、この場合、前記第1可動部材がラックに相当すると考えることも、ピニオンに相当すると考えることも可能である。
本項における「アシスト機構」は、アシストトルクの大きさを電気的に制御可能である機構であれば足りる。したがって、動力源として電動モータを用いてそれの出力トルクを制御する形式としたり、その動力源として高圧源を用いてそれの圧力の高さを電磁バルブ等、電気的圧力制御器を用いて制御する形式とすることが可能である。
本項における「第1可動部材」は、直線変位を行う直線変位部材(例えば、ラック)を意味する場合や、回転変位を行う回転部材(例えば、ピニオン)を意味する場合がある。
(2) 前記コントローラが、運転者が前記ステアリング操作部材を操作する操舵角が実質的に変化しないように運転者が前記ステアリング操作部材を保持する保舵状態において、前記アクティブ操舵の実行に起因した前記操舵反力の前記第1変化が抑制されるように前記操舵反力制御を行う(1)に記載の車両用操舵装置。
この装置によれば、保舵状態におけるアクティブ操舵が、操舵反力の第1変化が抑制されつつ実行される。したがって、この装置によれば、保舵状態においてアクティブ操舵が行われた場合に、本来の操舵反力は第1変化の発生により変化するにもかかわらず、運転者に伝達される実際の操舵反力の変化は抑制されるため、運転者が違和感を全く感じずに済むか、あるいは違和感を感じるにしてもその程度が軽減される。
(3) 前記コントローラが、前記ステアリング操作部材の操作状態と前記転舵機構の作動状態と当該車両用操舵装置の前記操舵特性と当該車両用操舵装置の温度との少なくとも一つに基づいて前記操舵反力制御を行う(1)または(2)に記載の車両用操舵装置。
本項および下記の各項において「操舵特性」は、例えば、当該操舵装置への入力すなわち作動力と、当該操舵装置からの出力すなわち転舵されるべき車輪の転舵角との関係として定義することが可能である。ここに、当該操舵装置への入力は、転舵されるべき車輪に対して行われるものであり、その入力の大きさは、車輪のタイヤと路面との間の摩擦力を反映する。その摩擦力の大きさは、例えば、前記第1可動部材の作動力(例えば、前述のラックの軸力)として検出することが可能である。
したがって、「操舵特性」は、例えば、転舵機構に対する入力と出力との関係として定義することが可能である。具体的には、第1可動部材の作動力(例えば、前述のラックの軸力、タイヤと路面との間の摩擦力)と、その第1可動部材の作動量(例えば、前述のラックの直線変位量)との関係として定義することが可能である。
さらに、「操舵特性」は、転舵されるべき車輪に対する入力と出力との関係として定義することが可能である。具体的には、例えば、第1可動部材の操作力(例えば、前述のラックの軸力、タイヤと路面との間の摩擦力)と、車輪の転舵角(アクティブ操舵中に車輪が転舵される角度に等しい。)との関係として定義することが可能である。
(4) 前記コントローラが、前記第2変化が抑制されるように前記操舵反力制御を行う(1)ないし(3)のいずれかに記載の車両用操舵装置。
上述したように、車両用操舵装置においては、部材間摩擦力が存在する。その部材間摩擦力の大きさは、上述の複数の部材の接触面間の法線力の大きさによって変化する。一方、その部材間摩擦力の向きは、それら複数の部材間の相対変位の向きによって変化する。
その相対変位の向きは、ステアリング操作部材と第1可動部材との間の相対変位の向きを反映する。例えば、転舵機構がラックアンドピニオン方式を採用する場合には、その相対変位の向きは、ステアリング操作部材とピニオンとの間の相対変位の向きであり、ピニオンとラックとの間の相対変位の向きでもある。
そして、上述したように、部材間摩擦力の大きさまたは向きが変化すると、その変化が直接または間接にステアリング操作部材を介して運転者に伝達され、その結果、その変化が運転者に操舵反力の変化として認識されてしまう。
一方、アクティブ操舵が実行され、その結果、上述の相対変位の向きが反転すると、上述の接触面間の法線力の大きさが大きくかつ急に変化することから、上述の部材間摩擦力の向きのみならず大きさも変化するとともに、その変化が操舵反力の変化として運転者に認識されてしまう。そのため、操舵反力と車輪の転舵角との間にヒステリシスを有する関係が成立することになる。
一方、アクティブ操舵によって車輪の転舵角を変化させようとすれば、上述の部材間摩擦力の変化の有無を問わず、車輪のタイヤと路面との間に作用するタイヤ−路面間摩擦力が変化し、それに応じて転舵機構の作動力も変化する。この変化も、部材間摩擦力の変化の場合と同様にして、操舵反力の変化として運転者に認識されてしまう。一方、このときの転舵機構の作動力すなわちタイヤ−路面間摩擦力は、車輪の転舵角に対して有限の傾きを有するように変化させられる。その傾きは、車両用操舵装置の操舵特性に相当する。
したがって、アクティブ操舵が実行されると、操舵反力と車輪の転舵角(例えば、ラックの直線変位量、ピニオンの回転角に相当する。)との間に、傾きとヒステリシスとの双方を有する関係が成立することになる。そのため、アクティブ操舵が実行されると、ヒステリシスの幅(すなわち、上述の部材間摩擦力の変化量)に基づく第1変化と、傾き(すなわち、上述のタイヤ−路面間摩擦力の変化量)に基づく第2変化とが重畳的に操舵反力に現れることとなる。
これに対し、本項に係る装置によれば、第2変化が抑制されるように操舵反力制御が行われる。
(5) 前記コントローラが、前記操舵反力制御の実行時に、前記ステアリング操作部材の操作状態と前記転舵機構の作動状態と当該車両用操舵装置の温度と当該車両用操舵装置の前記操舵特性との少なくとも一つに基づき、前記アクティブ操舵に起因する操舵反力の変化分を補償するために前記アシスト機構によってアシストトルクとして発生させるべき補償トルクを決定する補償トルク決定手段を含む(1)ないし(4)項のいずれかに記載の車両用操舵装置。
この装置によれば、アクティブ操舵に起因した操舵反力の変化を抑制するために、その変化分を補償する補償トルクが、ステアリング操作部材の操作状態と転舵機構の作動状態と当該車両用操舵装置の温度と当該車両用操舵装置の操舵特性との少なくとも一つに基づいて決定される。
この装置においては、補償トルクが発生させられると、それに応じて操舵反力が低減させられる。したがって、補償トルクの絶対値は、操舵反力の低減量と等しくなるように決定される。補償トルクの向きすなわち符号は、例えば、後述のように、ステアリング操作部材と第1可動部材との間の相対変位の方向に応じて決定することが可能である。
この装置においては、アシスト機構が、上述の操舵反力制御と並行して、本来の機能、すなわち、操舵トルクの軽減を実行する場合が考えられる。この場合、アシストトルクの目標値は、例えば、運転者の操舵トルクを軽減するための制御量と、アクティブ操舵に起因した操舵反力の変化を抑制するための制御量との和として決定することが可能である。
(6) 前記補償トルク決定手段が、前記ステアリング操作部材の変位状態と前記第1可動部材の変位状態との関係に基づいて前記補償トルクを決定する第1決定手段を含む(5)項に記載の車両用操舵装置。
ステアリング操作部材の変位状態と第1可動部材の変位状態との関係に基づいてそれらステアリング操作部材と第1可動部材との間の相対変位の態様が決まる。一方、前述の部材間摩擦力は、その相対変位の態様によって変化する。よって、その相対変位の態様に基づいて補償トルクを決定すれば、アクティブ操舵に起因した操舵反力の変化を精度よく抑制することが容易となる。
このような知見に基づき、本項に係る装置においては、ステアリング操作部材の変位状態と第1可動部材の変位状態との関係に基づいて補償トルクが決定される。
本項において「変位状態」は、例えば、該当する部材が停止しているか変位しているかを表わすように定義したり、該当する部材が変位している場合にその変位方向を表わすように定義することが可能である。
(7) 前記第1決定手段が、前記ステアリング操作部材および前記第1可動部材が共に、かつ、互いに逆位相で変位している場合に、ステアリング操作部材が実質的に停止しているのに対して第1可動部材が変位している場合より絶対値が大きくなるように前記補償トルクを決定する手段を含む(6)項に記載の車両用操舵装置。
アクティブ操舵の実行直前に、ステアリング操作部材および第1可動部材が共に、かつ、互いに逆位相で変位している状態にある場合に、その状態でアクティブ操舵が実行されると、ステアリング操作部材が、第1可動部材の変位方向とは逆向きの変位状態から、第1可動部材と同じ向きの変位状態に遷移させられる。
これに対し、アクティブ操舵の実行直前に、ステアリング操作部材は実質的に停止しているのに対して第1可動部材が変位している状態にある場合に、その状態でアクティブ操舵が実行されると、ステアリング操作部材が、実質的な停止状態から、第1可動部材の変位方向と同じ向きの変位状態に遷移させられる。
前者の状態遷移においては、ステアリング操作部材と第1可動部材との間の相対変位が後者の状態遷移より大きく変化するため、これに伴い、前述の部材間摩擦力も大きく変化する。したがって、前者の状態遷移においては、アシスト機構によって補償すべきトルクも後者の状態遷移より大きくなる。
以上説明した知見に基づき、本項に係る装置においては、ステアリング操作部材および第1可動部材が共に、かつ、互いに逆位相で変位している場合に、ステアリング操作部材が実質的に停止しているのに対して第1可動部材が変位している場合より絶対値が大きくなるように、補償トルクが決定される。
したがって、この装置によれば、ステアリング操作部材と第1可動部材との間の相対変位の態様との関係において補償トルクを適正化することが容易となる。
(8) 前記補償トルク決定手段が、前記操舵トルクに関連する物理量と、前記アシスト機構により発生させられるアシストトルクに関連する物理量とに基づき、それら操舵トルクとアシストトルクとを合成した値の、前記ステアリング操作部材の変位方向が反転した前後間における差が大きいほど絶対値が大きくなるように前記補償トルクを決定する第2決定手段を含む(5)ないし(7)項のいずれかに記載の車両用操舵装置。
一般に、車両用操舵装置においては、運転者によってステアリング操作部材に加えられる操舵トルクと、アシスト機構により発生させられるアシストトルクとを合成した値が、車輪を変向する向きにその車輪に作用させられる。この合成値は、ステアリング操作部材の変位方向が反転した前後間において変化する。
一方、ステアリング操作部材の変位方向が反転する短い時間内においては、ステアリング操作部材の変位に第1可動部材の変位がほとんど追従しない。よって、その時間内においては、車輪の転舵角がほとんど変化せず、ひいてはタイヤ−路面間摩擦力もほとんど変化しない。
したがって、上述の合成値が、ステアリング操作部材の変位方向が反転した前後間で変化する量は、前述の部材間摩擦力の最大変化量を実質的に表わしていると考えることが可能である。
このような知見に基づき、本項に係る装置においては、操舵トルクに関連する物理量と、アシスト機構により発生させられるアシストトルクに関連する物理量とに基づき、それら操舵トルクとアシストトルクとを合成した値の、ステアリング操作部材の変位方向が反転した前後間における差が大きいほど絶対値が大きくなるように、補償トルクが決定される。
したがって、この装置によれば、アクティブ操舵によって変化する部材間摩擦力の大きさとの関係において補償トルクを適正化することが容易となる。
本項において「操舵トルクに関連する物理量」は、操舵トルクそのものを排除する意味ではなく、また、操舵トルクを一義的に誘導可能な別の物理量を包含する意味である。このことは、「補償トルクに関連する物理量」についても適用される。
(9) 前記補償トルク決定手段が、当該車両用操舵装置の温度に基づき、その温度が低いほど絶対値が大きくなるように前記補償トルクを決定する第3決定手段を含む(5)ないし(8)項のいずれかに記載の車両用操舵装置。
一般に、車両用操舵装置においては、上述の部材間摩擦力の大きさが、当該操舵装置の温度(特に、その部材間摩擦力が発生する部位の温度)によって変化し、具体的には、温度が低いほど部材間摩擦力が増加する。
このような知見に基づき、本項に係る装置においては、当該装置の温度に基づき、その温度が低いほど絶対値が大きくなるように、補償トルクが決定される。したがって、この装置によれば、当該装置の温度との関係において補償トルクを適正化することが容易となる。
(10) 前記コントローラが、前記操舵速度と第1しきい値との比較により、運転者が前記ステアリング操作部材を実質的に同じ状態に保持する保舵状態にあるか否かを判定する第1判定と、前記第1可動部材の変位速度と第2しきい値との比較により、前記第1可動部材が停止状態にあるか否かを判定する第2判定とを行い、
前記第1および第2しきい値が、前記操舵速度に対する前記第1判定の結果の感度が、前記第1可動部材の変位速度に対する前記第2判定の結果の感度より低下するように設定されている(5)ないし(9)項のいずれかに記載の車両用操舵装置。
この装置においては、操舵速度と第1しきい値との比較により、ステアリング操作部材が保舵状態にあるか否かを判定する第1判定が行われ、さらに、第1可動部材の変位速度と第2しきい値との比較により、第1可動部材が停止状態にあるか否かを判定する第2判定が行われる。
ここで、操舵速度に対する第1判定の結果の感度(第1判定の結果が操舵速度によって変化する敏感さ)と、第1可動部材の変位速度に対する第2判定の結果の感度(第2判定の結果が第1可動部材の変位速度によって変化する敏感さ)とを互いに比較する。
前述の部材間摩擦力とタイヤ−路面間摩擦力とのうち特に部材間摩擦力は、第1可動部材の変位方向すなわち変位速度の符号の変化に対して敏感である。したがって、少なくとも部材間摩擦力の変化が操舵反力に現れないように補償トルクを精度よく制御するためには、第1可動部材の変位状態を敏感に判別することが重要である。よって、第1可動部材の変位速度に対する第2判定の結果の感度は、敏感であることが望ましい。
これに対し、ステアリング操作は通常、右きり、左きりおよび保舵のいずれかに分類される。そして、少なくとも部材間摩擦力の変化が操舵反力に現れないように補償トルクを制御するためには、ステアリング操作がそれら右きり、左きりおよび保舵のいずれに該当するのかが判別できれば足りる。
一方、保舵状態においては、操舵角が全く変化しないように運転者がステアリング操作部材を保持すると考えるのは現実的ではなく、操舵角はある値(0または0ではない値)をほぼ中心にして微小範囲内において変動し、その結果、操舵速度が0を中心にして微小範囲内において変動すると考えるのが自然である。このような微小変動は、例えば、ステアリング操作部材と第1可動部材とがトルクセンサ等の弾性体を介して互いに接続されていることによって誘発される。
保舵状態においては、操舵角が変動しても、操舵トルクが部材間摩擦力およびタイヤ−路面間摩擦力の和に打ち勝つことができない限り、第1可動部材は停止状態に維持される。第1可動部材を停止状態から変位状態に移行させるほどに大きな操舵トルクが運転者によってステアリング操作部材に加えられない限り、そのようなステアリング操作は保舵として分類されるのが、運転者の意思にも合致する。
したがって、第1判定の場合とは異なり、操舵速度に対する第2判定の結果の感度は鈍感にすることが、ステアリング操作を上述の3つの状態のいずれかとして安定的に判別するために望ましい。
以上説明した知見に基づき、本項に係る装置においては、第1判定において操舵速度と比較されるべき第1しきい値と、第2判定において第1可動部材の変位速度と比較されるべき第2しきい値とが、操舵速度に対する第1判定の結果の感度が、第1可動部材の変位速度に対する第2判定の結果の感度より低下するように設定されている。
したがって、この装置によれば、操舵速度に基づくステアリング操作部材の状態判別に対する要請と、第1可動部材の変位速度に基づく第1可動部材の状態判別に対する要請とであって互いに一致しないものを両立させることが容易となる。
(11) 前記補償トルク決定手段が、前記第1可動部材の変位速度に応じて連続的に変化する領域を有するように前記補償トルクを決定する第4決定手段を含む(5)ないし(10)項のいずれかに記載の車両用操舵装置。
この装置によれば、第1可動部材の変位速度の急変にもかかわらず、補償トルクが急変させられずに済む。よって、この装置によれば、第1可動部材の変位速度の急変に起因した衝撃が操舵反力に発生せずに済む。
(12) 前記補償トルク決定手段が、前記操舵速度に応じて連続的に変化する領域を有するように前記補償トルクを決定する第5決定手段を含む(5)ないし(11)項のいずれかに記載の車両用操舵装置。
例えば、操舵速度としきい値との比較により、ステアリング操作が保舵であるか否かを判定し、その結果に応じて補償トルクを決定する場合には、操舵速度がそのしきい値を中心にして変動すると、ステアリング操作の状態判別の結果も変動し、ひいては、補償トルクも変動することになる。
これに対し、ステアリング操作の状態判別を離散的に行って不連続的に補償トルクを決定するのではなく、そのような離散的な状態判別を省略して、操舵速度に応じて連続的に補償トルクを決定すれば、操舵速度の変動に起因した補償トルクひいては操舵反力の変動を回避することが容易となる。
このような知見に基づき、本項に係る装置においては、操舵速度に応じて連続的に変化する領域を有するように、補償トルクが決定される。
(13) 前記補償トルク決定手段が、前記車両の進行角を維持すべく運転者が前記ステアリング操作部材を実質的に同じ状態で保持する保舵状態と、車両の進行角を変化させるべく運転者が前記ステアリング操作部材をそれの操舵角が変化するように操作する転舵状態との間を前記ステアリング操作部材が遷移する際に、前記操舵速度の変化に対してヒステリシスを有して変化する領域を有するように前記補償トルクを決定する第6決定手段を含む(5)ないし(12)項のいずれかに記載の車両用操舵装置。
前記(12)項に係る装置によれば、操舵速度に応じて連続的に補償トルクが決定されるが、ステアリング操作部材が保舵状態と転舵状態(右きり状態または左きり状態)とに頻繁に遷移するために、その頻繁な遷移に補償トルクが追従してしまうと、補償トルクの変動傾向が増す。
これに対して、本項に係る装置においては、ステアリング操作部材が保舵状態と転舵状態との間を遷移する際に、操舵速度の変化に対してヒステリシスを有して変化する領域を有するように、補償トルクが決定される。
したがって、この装置によれば、ステアリング操作部材の状態遷移に対して補償トルクが過敏に応答せずに済み、補償トルクの頻繁な変化を抑制することが容易となる。
(14) 前記補償トルク決定手段が、前記操舵トルクに関連する物理量が、前記第1可動部材が停止状態から変位状態に移行するまでに変化した量に基づき、前記補償トルクを決定する第7決定手段を含む(5)ないし(13)項のいずれかに記載の車両用操舵装置。
仮に、操舵装置において、ステアリング操作部材と第1可動部材とが完全に剛体的に結合されている場合には、ステアリング操作部材の操舵角と第1可動部材の変位量(回転変位量または直線変位量)とが1対1の関係にあり、操舵角が変化すれば必ず第1可動部材が変位する。
しかし、現実には、ステアリング操作部材と第1可動部材とが弾性的に連結されていると考えるのが自然である。そのため、操舵角が変化しても、第1可動部材が変位せずに停止状態に維持される場合がある。この場合、第1可動部材の1個の変位量に対して複数個の操舵角が対応することになり、それら複数個の操舵角の中に、第1可動部材の1個の変位量に対して理論的に決まる1個の理論操舵角が存在すると考えることが可能である。この理論操舵角は、ステアリング操作部材と第1可動部材とが完全に剛体的に結合されている場合に、第1可動部材のある変位量に対応する操舵角に相当する。
アクティブ操舵に起因する操舵反力の変化をアシストトルクによって補償するために、実操舵角が理論操舵角と一致すると仮定して補償トルクを決定すると、実際には実操舵角が理論操舵角に一致していない場合には、その不一致に起因して補償トルクに誤差が発生する。
具体的には、実操舵角が理論操舵角より増加する側にずれている状態、すなわち、実操舵トルクが、第1可動部材のある変位量に対して理論的に対応する1個の理論操舵トルクより増加する側にずれている状態においてアクティブ操舵が開始された場合を想定する。この場合は、みかけ上、運転者が自らアシストトルクを発生させている状態においてアクティブ操舵が開始された場合に該当する。
この場合には、実操舵トルクのずれの存在にもかかわらず、操舵反力制御が実行され、その結果、実操舵角が理論操舵角と一致する場合を想定して決定された補償トルクと同じ補償トルクがアシスト機構によって発生させられると、発生したアシストトルクが過剰となり、操舵トルクすなわち操舵反力の軽減量が過剰となってしまう。
したがって、実操舵トルクが理論操舵トルクからずれている状態においてアクティブ操舵が開始される可能性がある場合には、実操舵トルクの理論操舵トルクからのずれ量を取得し、それを見込んで補償トルクを決定することが、アクティブ操舵に起因する操舵反力の変化を精度よく抑制するために望ましい。
一方、実操舵トルクの理論操舵トルクからのずれ量は、例えば、ステアリング操作部材も第1可動部材も停止状態にある状態から、少なくとも第1可動部材が変位している状態に移行する間に操舵トルクが変化した量に等しい。
以上説明した知見に基づき、本項に係る装置においては、操舵トルクに関連する物理量が、第1可動部材が停止状態から変位状態に移行するまでに変化した量に基づき、補償トルクが決定される。
したがって、この装置によれば、アクティブ操舵に起因した操舵反力の変化を精度よく予測することにより、補償トルクを精度よく決定することが容易となる。
本項において「操舵トルクに関連する物理量」は、操舵トルクそのものを排除する意味ではなく、また、操舵トルクを一義的に誘導可能な別の物理量を包含する意味である。そのような別の物理量の一例として、操舵角がある。
(15) 前記コントローラが、
前記補償トルク決定手段によって順次決定された複数の補償トルクを平滑化する平滑化手段と、
その平滑化された補償トルクが実現されるように前記アシスト機構を制御する制御手段と
を含む(5)ないし(14)項のいずれかに記載の車両用操舵装置。
この装置によれば、アシスト機構によって実現される補償トルクが平滑化されるため、操舵反力制御によって操舵反力が不連続的に変化せずに済む。例えば、操舵反力制御によって操舵反力にオーバシュートが発生したりアンダシュートが発生せずに済み、よって、操舵反力制御中に操舵フィーリングが悪化せずに済む。
本項における「平滑化手段」の一例は、ハードウエアまたはソフトウエアによって実現されるローパスフィルタである。
(16) 前記補償トルク決定手段が、前記第1可動部材の作動力に関連する物理量に基づき、前記第1可動部材の作動力が大きいほど絶対値が大きくなるように前記補償トルクを決定する第8決定手段を含む(5)ないし(15)項のいずれかに記載の車両用操舵装置。
前述の部材間摩擦力は、相互に接触する複数の部材間に作用する力に応じて増加する傾向がある。例えば、転舵機構において互いに接触するラックの歯面とピニオンの歯面とに作用する負荷が増加すると、それら歯面間の摩擦力が増加する。その増加を見込んで補償トルクを決定すれば、アクティブ操舵に起因した操舵反力の変化を確実に抑制することが容易となる。
このような知見に基づき、本項に係る装置においては、第1可動部材の作動力に関連する物理量に基づき、第1可動部材の作動力が大きいほど絶対値が大きくなるように補償トルクが決定される。
本項において「第1可動部材の作動力に関連する物理量」は、その作動力そのものを排除する意味ではなく、また、その作動力を一義的に誘導可能な別の物理量を包含する意味である。そのような別の物理量の一例として、アシスト機構によって発生させられるアシストトルクや、操舵トルクがある。
(17) 前記補償トルク決定手段が、前記操舵速度に基づく第1部分補償トルクと、前記第1可動部材の変位速度に基づく第2部分補償トルクとの合成値として前記補償トルクを決定する第9決定手段を含む(5)ないし(16)項のいずれかに記載の車両用操舵装置。
(18) 前記第9決定手段が、前記第1部分補償トルクが前記第2部分補償トルクより減少する傾向を有するようにそれら第1および第2部分補償トルクを決定する(17)項に記載の車両用操舵装置。
操舵速度に依存する第1部分補償トルクが、第1可動部材の変位速度に依存する第2部分補償トルクより小さい場合には、操舵反力が増加してステアリング操作の重厚感が増加する。逆に、第1部分補償トルクが第2部分補償トルクより大きい場合には、操舵反力が減少してステアリング操作の軽快感が増加する。
一方、例えば、前記コントローラを、車両の走行安定性が低下したためにそれを補うべくアクティブ操舵を実行するように設計する場合には、アクティブ操舵中、ステアリング操作の重厚感が強調される方が運転者の安心感を増加させる。
このような知見に基づき、本項に係る装置においては、第1部分補償トルクが第2部分補償トルクより減少する傾向を有するようにそれら第1および第2部分補償トルクが決定される。
(19) 前記第9決定手段が、予め定められた条件の成否に応じて、前記第1部分補償トルクの前記第2部分補償トルクに対する減少量が変化するようにそれら第1および第2部分補償トルクを決定する(18)項に記載の車両用操舵装置。
この装置によれば、例えば、特定の車両走行環境(例えば、車両の走行安定性が通常走行時より低下している環境)においては、ステアリング操作の重厚感を増加させて運転者の安心感を優先させる一方、それ以外の環境においては、ステアリング操作の軽快感を増加させて運転者の操縦応答性(回頭性)を優先させるというように、操舵特性を可変にすることが可能となる。
(20) 前記補償トルク決定手段が、前記アクティブ操舵の実行中における前記転舵角に関連する物理量に基づき、その転舵角に応じて絶対値が増加するように前記補償トルクを決定する第10決定手段を含む(5)ないし(19)項のいずれかに記載の車両用操舵装置。
前述のように、アクティブ操舵が実行されると、操舵反力すなわち操舵トルクと車輪の転舵角との間に傾きを有する関係が成立する。そのため、アクティブ操舵が実行されると、その傾きに基づく変化が操舵反力に現れる。その操舵反力は、車輪の転舵角に応じて増加するように変化する。
これに対し、本項に係る装置においては、アクティブ操舵の実行中における車輪の転舵角に関連する物理量に基づき、その転舵角に応じて絶対値が増加するように補償トルクが決定される。
したがって、この装置によれば、アクティブ操舵中に、操舵反力と車輪の転舵角との間に存在する傾きに基づく変化が操舵反力に現れることが抑制される。
(21) 前記第10決定手段が、前記アクティブ操舵中における前記転舵角と前記補償トルクとの比率が、前記転舵角と前記第1可動部材の作動力に関連する物理量との比率に応じて変化するように前記補償トルクを決定する(20)項に記載の車両用操舵装置。
アクティブ操舵中における車輪の転舵角と第1可動部材の作動力との比率、すなわち、転舵角と操舵トルクまたは操舵反力との比率(それら転舵角と操舵反力との間に存在する傾き)は常に一定であるとは限らず、タイヤと路面との間の摩擦力によって変化する。したがって、そのような比率の変化を見込んで補償トルクを決定すれば、アクティブ操舵に起因する操舵反力の変化を精度よく抑制することが容易となる。
このような知見に基づき、本項に係る装置においては、アクティブ操舵中における車輪の転舵角と補償トルクとの比率が、転舵角と第1可動部材の作動力に関連する物理量との比率に応じて変化するように、補償トルクが決定される。
本項において「第1可動部材の作動力に関連する物理量」は、その作動力そのものを排除する意味ではなく、その作動力を一義的に誘導できる別の物理量を含み意味である。そのような他の物理量には、例えば、タイヤと路面との間の摩擦力、摩擦係数等がある。
本項において「比率」は、該当する変数の変域内において不変であるように設定したり、可変であるように設定することが可能である。すなわち、該当する変数間の関係を線形なものとして定義したり、非線形なものとして定義することが可能なのである。
(22) 前記比率変更機構が、さらに、前記ステアリング操作部材によって駆動される第2可動部材と、その第2可動部材と前記モータとの間に設けられた減速機であって前記第1可動部材を駆動するものとを含み、前記第2可動部材の変位速度と前記第1可動部材の変位速度との比率が前記モータによって変更される(1)ないし(21)項のいずれかに記載の車両用操舵装置。
この装置によれば、比率変更機構のモータにより、操舵速度と第1可動部材の変位速度との比率を変更することと、ステアリング操作に依存せずに第1可動部材を変位させることによってアクティブに車両を操舵することとの双方が可能となる。
(23) さらに、
運転者が前記ステアリング操作部材を操作する操舵角を検出する操舵角センサと、
前記モータの回転角を検出するモータ回転角センサと
を含み、前記コントローラが、それら操舵角センサとモータ回転角センサとによってそれぞれ検出された操舵角とモータ回転角とに基づき、前記第1可動部材の変位量を検出する変位量検出手段を含む(22)項に記載の車両用操舵装置。
前記(22)項に係る装置においては、操舵角とモータ回転角と第1可動部材の変位量との間に既知の関係が成立する。この関係を利用すれば、操舵角およびモータ回転角から第1可動部材の変位量を誘導することが可能である。
このような知見に基づき、本項に係る装置においては、操舵角センサとモータ回転角センサとによってそれぞれ検出された操舵角とモータ回転角とに基づき、第1可動部材の変位量が検出される。
したがって、この装置によれば、操舵角センサとモータ回転角センサとを有効に利用することにより、専用のセンサなしでも第1可動部材の変位量を検出することが可能となり、当該装置におけるセンサの総数を節減することが容易となる。
なお付言するに、本項に記載の技術的特徴は、先行する他の項に記載の技術的特徴から分離して実施することが可能である。
以下、本発明のさらに具体的な実施の形態のいくつかを図面に基づいて詳細に説明する。
図1には、本発明の第1実施形態に従う車両用操舵装置(以下、単に「操舵装置」という。)のうちのハードウエア構成が斜視図で示されている。この操舵装置は、操作部10と転舵部12とを備えている。操作部10は、運転者によって回転操作されるステアリングホイール14と、それと共に回転するステアリング軸16とを含んでいる。これに対し、転舵部12は、車両において前側に位置する左右の操舵車輪20(図1においては右側の車輪20のみが代表的に示されている。)を転舵するための部分である。
転舵部12は、具体的には、ギヤ比変更機構22と、ラックアンドピニオン方式の操舵機構24と、電気パワーステアリング26とを備えている。
操舵機構24は、車輪20を変向するために車両において横方向に直線変位させられるラック軸30と、それと交差するピニオン軸32とを備えている。図2に示すように、ラック軸30にはラック34というギヤが形成される一方、ピニオン軸32にはピニオン36というギヤが形成されている。それらラック34とピニオン36とはかみ合わされてラックアンドピニオン機構38を構成しており、これにより、ピニオン36の回転運動がラック34の直線運動に変換される。
ギヤ比変更機構22は、ステアリングホイール14の回転速度すなわち操舵速度と、ピニオン軸32の回転速度との比率であるステアリングギヤ比を電気的に変更する機構である。このギヤ比変更機構22は、図2に示すように、ハウジング40と、ステアリング軸16と同軸のモータ42と、そのモータ42とピニオン軸32とを互いに連結する減速機46とを含んでいる。モータ42は、ハウジング40に固定のステータ48と、ロータ50とを有しており、そのロータ50が減速機46を経てピニオン軸32に連結されている。
減速機46は、ストレイン・ウェーブ・ギヤリング式であり、ステアリング軸16と一体的にかつ同軸に回転する制御ギヤ54と、ピニオン軸32と一体的にかつ同軸に回転するドリブンギヤ56とを備えている。ドリブンギヤ56の歯数は、制御ギヤ54の歯数よりn個少ない。制御ギヤ54は、ステアリング軸16が停止状態にあれば、ステータギヤとして機能する。
それら制御ギヤ54とドリブンギヤ56とは、共に、それらの内歯においてフレキシブルギヤ58の外歯にかみ合わされる。フレキシブルギヤ58は、薄いベルト状を成す金属弾性体であるため、弾性変形可能である。フレキシブルギヤ58は、ドリブンギヤ56と同数の外歯を備えている。したがって、フレキシブルギヤ58との間に回転数差をドリブンギヤ56は発生させないのに対し、制御ギヤ54は発生させる。
フレキシブルギヤ58の内周面に、断面が楕円である外周面を有する剛体の波動発生器60が相対回転可能に嵌合される。波動発生器60は、ロータ50と同軸にかつ一体的に回転させられる。波動発生器60が回転させられると、フレキシブルギヤ58は、自身の楕円の向きが波動発生器60によって変化させられつつ、回転させられる。
モータ42および波動発生器60が1回転すると、ドリブンギヤ56は、制御ギヤ54より歯数がn個少ないため、モータ42および波動発生器60の回転方向とは逆方向にn歯分回転する。その結果、それら制御ギヤ54とドリブンギヤ56との間に回転数差が発生させられ、それがピニオン軸32に伝達される。それにより、モータ42の回転速度より低い速度にピニオン軸32の回転速度が減速される。
電気パワーステアリング26は、ラック軸30に同軸に搭載されている。電気パワーステアリング26は、図2に示すように、ラック軸30と同軸のモータ62と、そのモータ62の回転運動をラック軸30の直線運動に変換する運動変換機構としてのボールねじ64とを備えている。モータ62は、ロータ66と図示しないステータとを備えており、ロータ66にラック軸30が同軸にかつ摺動可能に挿通されるとともに、それらロータ66とラック軸30との間にボールねじ64が配置されている。
図2に示すように、ステアリングホイール14からピニオン軸32までの力伝達系の途中にトルクセンサ70が配置されている。トルクセンサ70は、弾性ねじれを利用することにより、運転者によってステアリングホイール14に加えられる操舵トルク(これは、操舵反力に等しい。)を検出する。したがって、ステアリングホイール14とピニオン軸32とは、完全に剛体的に連結されているのではなく、一定範囲内での弾性ねじれを伴うように互いに連結されている。
以上の説明から明らかなように、本実施形態においては、転舵部12が前記(1)項における「転舵機構」の一例を構成し、ギヤ比変更機構22が同項における「比率変更機構」の一例を構成し、電気パワーステアリング26が同項における「アシスト機構」の一例を構成し、ピニオン軸32またはラック軸30が同項における「第1可動部材」の一例を構成しているのである。
図2に示すように、ギヤ比変更機構22および電気パワーステアリング26は、トルクセンサ70と、図3に示す操舵角センサ72およびモータ回転角センサ74の出力信号に基づき、電子制御ユニット(以下、「ECU(Electronic Control Unit)」という。)80によって制御される。操舵角センサ72は、運転者がステアリングホイール14を回転操作する角度を操舵角θsとして検出する。モータ回転角センサ74は、ギヤ比変更機構22に設けられ、モータ42のロータ50の回転角をモータ回転角θmとして検出する。
図3に示すように、ECU80は、コンピュータ82を主体として構成されている。コンピュータ82は、よく知られているように、CPU84とROM86とRAM88とがバス80によって互いに接続されて構成されている。ROM86には、CPU84によって実行されるべき各種プログラムが予め記憶されている。それらプログラムは、アクティブ操舵プログラム、パワーアシスト制御プログラム、補償トルク決定プログラムおよびピニオン角検出プログラムを含んでいる。
すなわち、本実施形態においては、ECU80が前記(1)項における「コントローラ」の一例を構成しているのである。
アクティブ操舵プログラムは、ECU80により、運転者のステアリング操作に依存しないでギヤ比変更機構22を介して車輪20の転舵角を変化させるアクティブ操舵を行うためにコンピュータ82によって実行される。
図4には、このアクティブ操舵プログラムの内容がフローチャートで概念的に表されている。このアクティブ操舵プログラムはコンピュータ82によって繰返し実行される。
このアクティブ操舵プログラムの各回の実行時には、まず、ステップS1(以下、単に「S1」で表わす。他のステップについても同じとする。)において、車速センサ、車輪速度センサ、車両のヨーレイトを検出するセンサ、車両の横加速度を検出するセンサ等、車両の状態量を検出する車両状態量センサ92(図3参照)の出力信号に基づき、車両状態量が検出される。
次に、S2において、その検出された車両状態量に基づき、車両の走行安定性が通常走行時より低下しているか否かが判定される。今回は、低下していないと仮定すれば、判定がNOとなり、直ちにこのアクティブ操舵プログラムの一回の実行が終了する。これに対し、今回は、車両の走行安定性が低下していると仮定すれば、判定がYESとなり、S3に移行する。
このS3においては、運転者のステアリング操作に依存することなく、カウンタステアリングを自動的に行うことが必要であると判定される。今回は、車輪20の転舵角(横スリップ角)の制御によって車輪20の横力を制御し、それにより、車両のヨーイングモーメントを制御することが、車両安定性を向上させるために必要であるからである。
続いて、S4において、そのオートカウンタステアリングの実現に適当なモータ42の制御量が決定される。その制御量は、例えば、前記検出された車両状態量を考慮して決定される。その後、S5において、その決定された制御量に基づき、モータ42が駆動される。これにより、アクティブ操舵が行われ、車両の安定性が低下することが回避される。
以上で、このアクティブ操舵プログラムの一回の実行が終了する。
前記パワーアシスト制御プログラムは、ECU80により、運転者の操舵トルクを軽減するためのアシストトルクを電気パワーステアリング26によって発生させるためにコンピュータ82によって実行される。
本実施形態においては、ECU80により、ステアリングホイール14から運転者に作用する操舵反力がアクティブ操舵に起因して変化すべき変化分を電気パワーステアリング26のアシストトルクによって補償することにより、アクティブ操舵に起因する操舵反力の変化を抑制する操舵反力制御が実行される。アクティブ操舵に起因する操舵反力の変化分を補償する補償トルクを決定するために、前記補償トルク決定プログラムがコンピュータ82によって実行される。前記パワーアシスト制御プログラムは、上述の、操舵トルクの軽減という目的の他に、その決定された補償トルクを電気パワーステアリング26によって発生させることをも目的として実行される。
なお付言するに、アクティブ操舵に起因する操舵反力の変化分を補償する補償トルクは、具体的には、アクティブ操舵に起因して操舵反力が増加する可能性がある場合には、操舵反力を減少させるアシストトルクが補償トルクであり、逆に、アクティブ操舵に起因して操舵反力が減少する可能性がある場合には、操舵反力を増加させるアシストトルクが補償トルクである。
図5には、上記パワーアシスト制御プログラムの内容がフローチャートで概念的に表されている。このパワーアシスト制御プログラムも繰返し実行される。
このパワーアシスト制御プログラムの各回の実行時には、まず、S31において、操舵トルクセンサ70の出力信号に基づき、操舵トルクが検出される。次に、S32において、その検出された操舵トルクに基づき、アシストトルクの基本値Tbaseが決定される。基本値Tbaseは、通常、操舵トルクの検出値と等しくなるように決定される。
続いて、S33において、前記補償トルク決定プログラムの実行によって決定された補償トルクTconがRAM88から読み込まれる。その後、S34において、前記決定された基本値Tbaseと補償トルクTconとを合成することにより、最終アシストトルクTfinalが決定される。最終アシストトルクTfinalは、例えば、基本値Tbaseと補償トルクTconとの和として決定される。
続いて、S35において、その決定された最終アシストトルクTfinalに基づき、モータ62の制御量が決定される。その後、S36において、その決定された制御量に基づき、モータ62が駆動される。これにより、適当なアシストルクが電気パワーステアリング26によって発生させられる。
以上で、このパワーアシスト制御プログラムの一回の実行が終了する。
ピニオン軸32の回転角であるピニオン角θpは、前記補償トルク決定プログラムを実行するために使用される。一方、本実施形態においては、ピニオン角θpが、専用のセンサによってではなく、操舵角θsとモータ回転角θmとを用いて計算によって検出される。その検出のために前記ピニオン角検出プログラムがコンピュータ82によって実行される。
図6には、そのピニオン角検出プログラムの内容がフローチャートで表わされている。このピニオン角検出プログラムも繰返し実行される。
このピニオン角検出プログラムの各回の実行時には、まず、S51において、操舵角センサ72の出力信号に基づき、操舵角θsが検出される。次に、S52において、モータ回転角センサ74の出力信号に基づき、モータ回転角θmが検出される。
続いて、S53において、モータ回転角θmの検出値と減速機46の減速比Rとの積と、操舵角θsの検出値との和が計算され、それがピニオン角θpとして採用される。減速比Rは、モータ42の回転速度とピニオン軸32の回転速度との比であり、これは、固定値である。
以上で、このピニオン角検出プログラムの一回の実行が終了する。
なお付言するに、上述の計算によってピニオン角θpを検出する精度を向上させたい場合には、操舵角センサ72によって操舵角θsを、ステアリングホイール14から減速機46までの力伝達系のうち、トルクセンサ70より上流側において検出するのではなく、下流側において検出することが望ましい。この態様によれば、その力伝達系のねじれの影響がピニオン角θpの計算値に誤差として現れずに済む。
本実施形態においては、前記操舵反力制御が、操舵角が実質的に変化しないように運転者がステアリングホイール14を保持する保舵状態において、アクティブ操舵の実行に起因した操舵反力の変化を抑制するために行われる。そのために、前記補償トルクが決定され、その補償トルクを決定するために前記補償トルク決定プログラムがコンピュータ82によって実行される。
一方、本実施形態においては、当該操舵装置が、操舵反力制御が実行されない状態においてアクティブ操舵が実行されると、当該操舵装置の内部における摩擦力の変化に起因する第1変化と、車輪20のタイヤと路面との間の摩擦力の変化に起因する第2変化とが重畳的に操舵反力Tre(本実施形態においては、操舵反力Treが狭義の力ではなくトルクを意味する。)に発生する操舵特性を有している。
この操舵特性は、図7に示すように、横軸には操舵角θs(またはピニオン角θp(すなわち、車輪20の転舵角))、縦軸には操舵反力Treが取られた座標系において、操舵反力Treが操舵角θsの変化に対して有限の傾きとヒステリシスとを有して変化することとして表わされる。
そのため、本実施形態においては、操舵反力制御なしでアクティブ操舵が実行されると、図7に示すように、ヒステリシスの幅に基づく第1変化(前述の部材間摩擦力の変化に基づく変化)ΔT1と、傾きに基づく第2変化(前述のタイヤ−路面間摩擦力の変化に基づく変化)ΔT2とが重畳的に操舵反力Treに発生してしまう。
以上、操舵角θsと操舵反力Treとの関係を図7に示すグラフを用いて説明したが、保舵状態においてアクティブ操舵が実行されると、操舵角θsは変化せずにピニオン角θpが変化する。このときのピニオン角θpと操舵反力Treとの関係は、図7に示すグラフにおいて操舵角θsをピニオン角θpに置換したものに相当する。
図8には、操舵角θsと操舵反力Treとの関係が、第1変化ΔT1の量に着目してグラフで表わされている。このグラフから明らかなように、操舵反力Treの第1変化ΔT1の量は、操舵角θsの変化が開始されるタイミングによって異なる。このことは後に詳述する。
そして、本実施形態においては、第1変化ΔT1および第2変化ΔT2のうち第1変化ΔT1が抑制されるように操舵反力制御が実行される。
図9には、前記補償トルク決定プログラムの内容がフローチャートで概念的に表されている。この補償トルク決定プログラムも繰返し実行される。
この補償トルク決定プログラムの各回の実行時には、まず、S101において、操舵角センサ72によって操舵角θsが検出される。次に、S102において、前記ピニオン角検出プログラムの実行によって検出されてRAM88に格納されたピニオン角θpがRAM88から読み込まれる。
続いて、S103において、操舵角θsの今回検出値から前回検出値を引き算することによって操舵速度Vsが演算される。その後、S104において、ピニオン角θpの今回値から前回値を引き算することによってピニオン速度Vpが演算される。
続いて、S105において、前述の部材間摩擦力に基づいてステアリングホイール14に発生する部材間摩擦トルクTfricがROM86またはRAM88から読み込まれる。本実施形態においては、部材間摩擦トルクTfricが固定値としてROM86に予め記憶されている。部材間摩擦トルクTfricは、図8に示すように、操舵反力(トルク)Treに関するヒステリシスの幅の半値を意味する。
さらに、図8には、次の操舵特性も示されている。
すなわち、完全な保舵状態(操舵反力Treがヒステリシスの幅の中心に位置する状態)において、操舵反力Treが増加する向きにアクティブ操舵が開始されたと仮定すれば、操舵反力TreがΔT1aだけ増加する。すなわち、部材間摩擦トルクTfricと同じ量、操舵反力Treが増加するのである。
これに対し、転舵状態に近い保舵状態(操舵反力Treがヒステリシスの幅の端位置に位置する状態)において、操舵反力Treが増加する向きにアクティブ操舵が開始されたと仮定すれば、操舵反力TreがΔT1bだけ増加する。すなわち、部材間摩擦トルクTfricの2倍と同じ量、操舵反力Treが増加するのである。
いずれの場合にも、アクティブ操舵に起因して操舵反力Treが変化する向きは、アクティブ操舵開始前におけるステアリングホイール14の操舵状態と、そのアクティブ操舵開始後における車輪20の転舵状態との関係に応じて変化する。
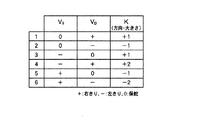
以上説明した知見に基づき、図9のS106においては、S105において読み込まれた部材間摩擦トルクTfricに乗じられる係数Kが決定される。
具体的には、図10に表で表わされている規則に従って係数Kが、+2、+1、0、−1および−2のいずれかとして決定される。その規則は、ステアリングホイール14の操舵状態(変位状態)と車輪20の転舵状態(車輪20、ラック軸30またはピニオン軸32の変位状態)との関係が場合分けされ、各場合ごとに係数Kが特定される。以下、具体的に説明する。
(1) 第1の場合、すなわち、ステアリングホイール14が保持状態にあるために操舵速度Vsが0であり、かつ、ピニオン軸32が右きり状態にあるためにピニオン速度Vpの符号が正である場合には、係数Kが「+1」に決定される。
(2) 第2の場合、すなわち、ステアリングホイール14が保持状態にあるために操舵速度Vsが0であり、かつ、ピニオン軸32が左きり状態にあるためにピニオン速度Vpの符号が負である場合には、係数Kが「−1」に決定される。
(3) 第3の場合、すなわち、ステアリングホイール14が左きり状態にあるために操舵速度Vsの符号が負であり、かつ、ピニオン軸32が保舵状態にあるためにピニオン速度Vpが0である場合には、係数Kが「+1」に決定される。
(4) 第4の場合、すなわち、ステアリングホイール14が左きり状態にあるために操舵速度Vsの符号が負であり、かつ、ピニオン軸32が右きり状態にあるためにピニオン速度Vpの符号が正である場合には、係数Kが「+2」に決定される。
(5) 第5の場合、すなわち、ステアリングホイール14が右きり状態にあるために操舵速度Vsの符号が正であり、かつ、ピニオン軸32が保舵状態にあるためにピニオン速度Vpが0である場合には、係数Kが「−1」に決定される。
(6) 第6の場合、すなわち、ステアリングホイール14が右きり状態にあるために操舵速度Vsの符号が正であり、かつ、ピニオン軸32が左きり状態にあるためにピニオン速度Vpの符号が負である場合には、係数Kが「−2」に決定される。
以上説明した規則に従って係数Kが決定されれば、その後、図9のS107において、その決定された係数Kに、前記読み込まれた部材間摩擦トルクTfricが乗じられることにより、補償トルクTconが決定される。その決定された補償トルクTconが電気パワーステアリング26によって実現されれば、アクティブ操舵に起因する部材間摩擦力の発生に伴う操舵反力Treの変化が抑制される。
以上で、この補償トルク決定プログラムの一回の実行が終了する。
以上の説明から明らかなように、本実施形態においては、コンピュータ82が図4に示すアクティブ操舵プログラムを実行することにより、前記(1)項における「アクティブ操舵」の一例が実行され、また、コンピュータ82が図5におけるS33ないしS36と図9に示す補償トルク決定プログラムとを実行することにより、前記(1)ないし(4)項のいずれかにおける「操舵反力制御」の一例が実行されるのである。
さらに、本実施形態においては、コンピュータ82のうち図9に示す補償トルク決定プログラムを実行する部分が、前記(5)項における「補償トルク決定手段」の一例を構成しているのである。さらに、コンピュータ82のうち図9におけるS106を実行する部分が前記(6)または(7)項における「第1決定手段」の一例を構成しているのである。
さらに、本実施形態においては、コンピュータ82のうち図9に示す補償トルク決定プログラムを実行する部分が、前記(17)項における「第9決定手段」の一例を構成しているのである。
次に、本発明の第2実施形態を説明する。ただし、本実施形態は、第1実施形態と補償トルク決定プログラムの内容に関して異なるのみで、他の要素については共通するため、共通する要素については、同一の符号または名称を使用して引用することにより、詳細な説明を省略し、補償トルク決定プログラムについてのみ詳細に説明する。
第1実施形態においては、操舵速度Vsとピニオン速度Vpとの組合せが、それらに共通の係数Kに関連付けられ、最終的に補償トルクTconに関連付けられる。
これに対し、本実施形態においては、補償トルクTconの成分が第1部分補償トルクTcon1と第2部分補償トルクTcon2とに分離され、操舵速度Vsとピニオン速度Vpとがそれぞれ、第1部分補償トルクTcon1と第2部分補償トルクTcon2とに関連付けられる。
図11には、本実施形態に従う車両用操舵装置のECU80のコンピュータ82によって実行される補償トルク決定プログラムの内容がフローチャートで概念的に表されている。以下、この補償トルク決定プログラムを説明するが、第1実施形態における補償トルク決定プログラムと共通するステップについては簡単に説明する。
本実施形態における補償トルク決定プログラムにおいては、S131ないしS134が図9におけるS101ないしS104と同様にして実行される。
続いて、S135において、演算された操舵速度Vsに基づき、例えば図12にグラフで表わされている関係に従い、第1部分補償トルクTcon1が決定される。図12のグラフで表わされる例においては、操舵速度Vsの絶対値が0でないしきい値Vsthを超えない場合に、第1部分補償トルクTcon1が0に決定され、これに対し、操舵速度Vsの絶対値がしきい値Vsthを超える場合に、第1部分補償トルクTcon1が0でない設定値に決定される。本実施形態においては、その設定値が前記部材間摩擦トルクTfricと等しい値とされている。
具体的には、操舵速度Vsが正のしきい値+Vsthを超える場合には、第1部分補償トルクTcon1が負の設定値−Tfricに決定され、一方、操舵速度Vsが負のしきい値−Vsthを下回る場合には第1部分補償トルクTcon1が、正の設定値+Tfricに決定される。
その後、図11のS136において、演算されたピニオン速度Vpに基づき、例えば図13にグラフで表わされている関係に従い、第2部分補償トルクTcon2が決定される。図13のグラフで表わされる例においては、ピニオン速度Vpが0である場合に、第2部分補償トルクTcon2が0に決定され、これに対し、ピニオン速度Vpが0ではない場合に、第2部分補償トルクTcon2が0でない設定値に決定される。本実施形態においては、その設定値が前記部材間摩擦トルクTfricと等しい値とされている。
具体的には、ピニオン速度Vpが0より大きい場合には、第2部分補償トルクTcon2が正の設定値+Tfricに決定され、一方、ピニオン速度Vpが0より小さい場合には、第2部分補償トルクTcon2が負の設定値−Tfricに決定される。
以上の説明から明らかなように、本実施形態においては、操舵速度Vsに基づく第1部分補償トルクTcon1の絶対値の最大値と、ピニオン速度Vpに基づく第2部分補償トルクTcon2の絶対値の最大値とが、共に、部材間摩擦トルクTfricと等しくなるように設定されているのである。
続いて、図11のS137において、以上のようにして決定された第1および第2部分補償トルクTcon1,Tcon2の和と等しくなるように補償トルクTconが決定される。ここに、補償トルクTconは、操舵速度Vsおよびピニオン速度Vpとの間に、図10に表で表わされる関係と同じ関係を有するように決定される。
以上で、この補償トルク決定プログラムの一回の実行が終了する。
次に、本発明の第3実施形態を説明する。ただし、本実施形態は、第1および第2実施形態と共通する要素が多いため、共通する要素については、同一の符号または名称を使用して引用することによって詳細な説明を省略し、異なる要素についてのみ、詳細に説明する。
第1および第2実施形態においては、補償トルクTconを決定する際、部材間摩擦トルクTfricが固定の設定値として扱われる。これに対し、本実施形態においては、部材間摩擦トルクTfricが可変値としてその都度決定される。
図14には、本実施形態におけるECU80の要部が機能ブロック図で表わされている。このECU80においては、部材間摩擦トルク決定部100が設けられている。この部材間摩擦トルク決定部100により、操舵トルクと、アシストトルクを発生させるために電気パワーステアリング26のモータ62に流れるアシスト電流と、当該操舵装置の温度とに基づき、部材間摩擦トルクTfricが決定される。当該操舵装置の温度は、図3に示す温度センサ102によって検出される。
その決定された部材間摩擦トルクTricは、補償トルク決定部104に供給される。補償トルク決定部104においては、その供給された部材間摩擦トルクTfricと、操舵角θsおよびピニオン角θpとに基づき、第1および第2実施形態におけると同様にして、補償トルクTconが決定される。
その決定された補償トルクTconは、ローパスフィルタ106(図14においては、「LPS」で表わす。)を経てアシスト制御部108に供給される。その供給される補償トルクTconは、ローパスフィルタ106によって高周波ノイズが除去されることにより、平滑化される。
アシスト制御部108においては、位相補償フィルタ110が設けられている。その位相補償フィルタ110は、それに供給された補償トルクTconと操舵トルクとに対して位相進み補償を行う。アシスト制御部108から指令信号が出力され、その指令信号はアシスト電流決定部112に供給される。そのアシスト電流決定部112により、アシスト電流の基準値Irefが決定される。
その決定された基準値Irefはドライバ114に供給され、その結果、その基準値Irefと等しい値を有する電流が図示しない電源からモータ62に供給される。その通電により、操舵トルクの軽減と、アクティブ操舵に起因する操舵反力Treの変化の抑制とを実現するためのアシストトルクがモータ62によって発生させられる。
図15には、部材間摩擦トルク決定部100の詳細が機能ブロック図で表されている。この部材間摩擦トルク決定部100においては、操舵トルクとアシスト電流とが摩擦トルク推定部118に供給される。
その摩擦トルク推定部118においては、図16にグラフで概念的に表すように、操舵トルクTsの符号が反転する直前と直後との間における操舵トルクTsの変化量と、その間におけるアシスト電流I(アシストトルクに相当する。)の変化量との和が部材間摩擦トルクTfricに等しいという事実に着目し、それら操舵トルクTsとアシスト電流Iとに基づいて部材間摩擦トルクTfricが推定される。図16において「Tspeak」と「Ipeak」とはそれぞれ、操舵トルクTsの符号の反転直前における操舵トルクとアシスト電流とを表わしており、一方、「Tslow」と「Ilow」とはそれぞれ、反転直後における操舵トルクとアシスト電流とを表わしている。
図15に示すように、摩擦トルク推定部118によって推定された部材間摩擦トルクTfricは、摩擦トルク出力部120を経て外部に出力される。
図15に示すように、部材間摩擦トルク決定部100には、さらに、摩擦トルクメモリ122と摩擦トルク読出部124とが設けられている。摩擦トルクメモリ122には、例えば図17にグラフで表すように、当該操舵装置の温度に関連付けて部材間摩擦トルクTfricが予め記憶されている。摩擦トルク読出部124は、温度の検出値に対応する部材間摩擦トルクTfricを摩擦トルクメモリ122から読み出す。その読み出された部材間摩擦トルクTfricは、摩擦トルク出力部120を経て外部に出力される。
図15に示すように、部材間摩擦トルク決定部100には、さらに、メモリ更新部126も設けられている。このメモリ更新部126は、摩擦トルク推定部118によって推定された部材間摩擦トルクTfricを参照して摩擦トルクメモリ122のデータを更新するために設けられている。
図18には、以上説明した摩擦トルク読出部124の処理を実施するためにコンピュータ82によって実行される摩擦トルク読出プログラムの内容がフローチャートで概念的に表わされている。
この摩擦トルク読出プログラムの各回の実行時においては、まず、S181において、一連の車両走行が開始されてから、摩擦トルク推定部118によって部材間摩擦トルクTfricの推定が完了したか否かが判定される。今回の一連の車両走行の初期であるために、部材間摩擦トルクTfricの推定が未だ完了していないと仮定すれば、判定がNOとなる。
この場合には、S182において、温度センサ102によって温度が検出される。続いて、S183において、その検出された温度に基づき、図17にグラフで表す関係に従い、その温度に対応する部材間摩擦トルクTfricが摩擦トルクメモリ122から読み出される。
その後、S184において、その読み出された部材間摩擦トルクTfricが補償トルク決定部104に対して出力される。以上で、この摩擦トルク読出プログラムの一回の実行が終了する。
この摩擦トルク読出プログラムの実行が繰り返されるうちに、摩擦トルク推定部118による部材間摩擦トルクの推定が完了したと仮定すれば、S181の判定がYESとなり、直ちにこの摩擦トルク読出プログラムの一回の実行が終了する。
図19には、摩擦トルク推定部118の処理を実施するためにECU80のコンピュータ82によって実行される摩擦トルク推定プログラムの内容がフローチャートで概念的に表されている。
この摩擦トルク推定プログラムの各回の実行時においては、まず、S151において、操舵トルクセンサ70によって操舵トルクTsが検出される。次に、S152において、モータ62に供給されたアシスト電流Iが、図3に示す電流センサ130を用いて検出される。
続いて、S153において、検出された操舵トルクTsにつき、操舵トルクTsの符号が反転する直前の値と直後の値とがそれぞれ検出される。同様にして、検出されたアシスト電流Iにつき、操舵トルクTsの符号が反転する直前の値と直後の値とがそれぞれ検出される。それら操舵トルクTsとアシスト電流Iとのそれぞれにつき、反転直前と反転直後との間における差(以下、「前後差」という。)が演算され、それら演算値の和に基づき、部材間摩擦トルクTfricが推定される。
その後、S154において、部材間摩擦トルクTfricの推定が完了したか否かが判定される。その推定の精度が確保されるほどに多数のデータが操舵トルクTsの前後差とアシスト電流Iの前後差とについて蓄積されたために部材間摩擦トルクTfricが所定の精度で推定された場合には、その推定が完了したと判定される。そうでなければ、その推定が完了していないと判定され、更なるデータの蓄積が行われる。
今回は、推定が完了してはいないと仮定すれば、S154の判定がNOとなり、直ちにこの摩擦トルク推定プログラムの一回の実行が終了する。
これに対し、今回は、推定が完了したと仮定すれば、S154の判定がYESとなり、S155およびS156の実行により、摩擦トルクメモリ122のデータが、推定された部材間摩擦トルクTfricと等しくなるように構成される。本実施形態においては、摩擦トルクメモリ122において部材間摩擦トルクTfricが温度に関連付けられている。そのため、S155において、当該操舵装置の温度が検出され、S156において、その検出された温度に対応する部材間摩擦トルクTfricが今回の推定値と等しくなるように更新される。
その後、S157において、その推定された部材間摩擦トルクTfricが補償トルク決定部104に対して出力される。
以上で、この摩擦トルク推定プログラムの一回の実行が終了する。
以上の説明から明らかなように、本実施形態においては、コンピュータ82のうち図19におけるS151ないしS153を実行する部分が、前記(8)項における「第2決定手段」の一例を構成しているのである。さらに、コンピュータ82のうち図18に示す摩擦トルク読出プログラムを実行する部分が、前記(9)項における「第3決定手段」の一例を構成しているのである。
次に、本発明の第4実施形態を説明する。ただし、本実施形態は、第2実施形態と共通する要素が多いため、共通する要素については、同一の符号または名称を使用して引用することにより、詳細な説明を省略し、異なる要素についてのみ詳細に説明する。
本実施形態においては、図20に示すように、第2実施形態と同様に、ステアリングホイール14が保舵状態にあるか転舵状態にあるかを判定するために、操舵速度Vsと比較されるべきしきい値として、いずれも0ではない、正のしきい値+Vsthと負のしきい値−Vsthとが用いられる。すなわち、ステアリングホイール14が操舵状態(定常状態)にあるか転舵状態(過渡状態)にあるかが、操舵速度Vsに基づき、不感帯を利用することによって安定的に判定されるのである。
したがって、本実施形態によれば、図20の左部に示すように、保舵状態であるにもかかわらずステアリングホイール14が運転者によって回転振動するように操作されても、操舵速度Vsに基づいて決定される第1部分補償トルクTcon1が時間と共に変動せずに済み、操舵反力制御の実行によって操舵フィーリングが悪化せずに済む。
これに対し、図21に示すように、操舵速度Vsと比較されるべきしきい値として0を用いる場合には、保舵状態においてステアリングホイール14が回転振動させられると、第1部分補償トルクTcon1が時間と共に変動する傾向が増し、操舵フィーリングが悪化してしまう。
本実施形態においては、図22に示すように、ピニオン軸32が停止状態にあるか回転状態にあるかを判定するために、ピニオン速度Vpと比較されるべきしきい値として、いずれも0ではない、正のしきい値+Vpthと負のしきい値−Vpthとが用いられる。すなわち、ピニオン軸32が停止状態(定常状態)にあるか回転状態(過渡状態)にあるかが、ピニオン速度Vpに基づき、不感帯を利用することによって安定的に判定されるのである。
ステアリングホイール14が保舵状態において回転振動させられた場合、操舵速度Vsは敏感に応答するのに対し、ピニオン軸32はそれほど敏感には応答せず、よって、ピニオン速度Vpも操舵速度Vsほどには敏感に応答しない。
それにもかかわらず、操舵速度Vsに対して設定された不感帯の幅をピニオン速度Vpに対して設定された不感帯の幅より狭くした場合には、ステアリングホイール14が保舵状態にあるか否かの判定の結果が操舵速度Vsの変化に対して過敏に応答してしまい、その結果、第1部分補償トルクTcon1も過敏に応答して操舵フィーリングが悪化する。
そこで、本実施形態においては、操舵速度Vsに対して設定された不感帯の幅が、ピニオン速度Vpに対して設定された不感帯の幅より広くされている。
図23には、本実施形態の一変形例が示されている。この変形例においては、ピニオン速度Vpに対して設定された不感帯内において、第2部分補償トルクTcon2がピニオン速度Vpに対して連続的に変化する。これに対し、図22においては、その不感帯内において、第2部分補償トルクTcon2がピニオン速度Vpに対して不連続的に変化する。
この変形例においては、図22に示す場合より、不感帯内において第2部分補償トルクTcon2がピニオン速度Vpに依存する程度が高い。しかし、この変形例によれば、ピニオン速度Vpが不感帯から退出したり不感帯に進入するときにおける第2部分補償トルクTcon2の変化が、図22に示す場合より緩和される。
以上の説明から明らかなように、本実施形態においては、図20に示すしきい値Vsthが前記(10)項における「第1しきい値」の一例を構成し、図22に示すしきい値Vpthが同項における「第2しきい値」の一例を構成しているのである。
さらに、本実施形態においては、コンピュータ82による図11に示す補償トルク決定プログラムの実行により、操舵速度Vsとしきい値Vsthとの比較により、第1部分補償トルクTcon1を決定することが同項における「第1判定」の一例を構成し、ピニオン速度Vpとしきい値Vpthとの比較により、第2部分補償トルクTcon2を決定することが同項における「第2判定」の一例を構成しているのである。
さらに、本実施形態においては、コンピュータ82のうち、図11におけるS136であって図23に示す関係に従って第2部分補償トルクTcon2を決定する部分が前記(11)項における「第4決定手段」の一例を構成しているのである。
次に、本発明の第5実施形態を説明する。ただし、本実施形態は、第4実施形態と共通する要素が多いため、共通する要素については、同一の符号または名称を使用して引用することにより、詳細な説明を省略し、異なる要素についてのみ詳細に説明する。
図24に示すように、本実施形態においては、操舵速度Vsの正側にも負側にも、第1しきい値Vsth1とそれより大きい第2しきい値Vsth2が設定されている。さらに、正の第1しきい値+Vsth1と負の第1しきい値−Vsth1とによって画定される領域が、第4実施形態において操舵速度Vsに対して設定された不感帯に相当する。
ところで、図25に示すように、その不感帯の幅を、正の第2しきい値+Vsth2と負の第2しきい値−Vsth2とによって画定される領域まで拡大すると、操舵速度Vsが0を中心に振動することに対して、第1部分補償トルクTcon1が安定させられる傾向が増す。しかし、操舵速度Vsが第2しきい値Vsth2を中心に振動することに対しては、第1部分補償トルクTcon1が不安定となる傾向が残る。
これに対し、本実施形態においては、図24に示すように、0と第1しきい値Vsth1との間においては、第1部分補償トルクTcon1が0に維持されるが、第1しきい値Vsth1と第2しきい値Vsth2との間においては、第1部分補償トルクTcon1が操舵速度Vsに対して連続的に変化させられる。
したがって、本実施形態によれば、操舵速度Vsが0を中心に振動することに対してのみならず、第2しきい値Vsth2を中心に振動することに対しても、第1部分補償トルクTcon1が安定させられる。
図26には、本実施形態の一変形例が示されている。この変形例においては、操舵速度Vsと第1部分補償トルクTcon1との間のヒステリシス域が、第1しきい値Vsth1と第2しきい値Vsth2との間に設定されている。
このヒステリシス域内において操舵速度Vsが0に近づく向きに変化させられると、そのヒステリシス域内においては第1部分補償トルクTcon1が一定に保たれ、そのヒステリシス域を通過した後にはじめて第1部分補償トルクTcon1が変化させられる。
一方、このヒステリシス域内において操舵速度Vsが0から遠ざかる向きに変化させられると、そのヒステリシス域内においては第1部分補償トルクTcon1が一定に保たれ、そのヒステリシス域を通過した後にはじめて第1部分補償トルクTcon1が変化させられる。
したがって、この変形例によれば、操舵速度Vsが第1しきい値Vsth1と第2しきい値Vsth2との間において振動した場合であっても、第1部分補償トルクTcon1が、上述のヒステリシスが存在しない場合ほどに強く変動せずに済み、よって、操舵フィーリングが向上する。
以上の説明から明らかなように、本実施形態においては、コンピュータ82のうち、図11におけるS135であって図24に示す関係に従って第1部分補償トルクTcon1を決定する部分が前記(12)項における「第5決定手段」の一例を構成しているのである。
さらに、本実施形態においては、コンピュータ82のうち、図11におけるS135であって図26に示す関係に従って第1部分補償トルクTcon1を決定する部分が前記(13)項における「第6決定手段」の一例を構成しているのである。
次に、本発明の第6実施形態を説明する。ただし、本発明は、第1ないし第5実施形態と共通する要素が多いため、共通する要素については、同一の符号または名称を使用して引用することにより、詳細な説明を省略する。
第1ないし第5実施形態においては、図8に示すように、アクティブ操舵が、完全な保舵状態において開始される場合と、そのアクティブ操舵とは逆向きの転舵状態において開始される場合とのいずれかに該当すると仮定されて補償トルクTconが決定される。
これに対し、本実施形態においては、アクティブ操舵が、完全な保舵状態と、逆向きの転舵状態との中間の状態において開始された場合でも、補償トルクTconが精度よく取得されるようになっている。
この目的を達するため、本実施形態においては、第1ないし第5実施形態においてコンピュータ82によって実行されるいくつかのプログラムに加えて、図27および図28にそれぞれフローチャートで概念的に表わされる補正値演算プログラムおよび補償トルク補正プログラムがコンピュータ82によって実行される。
図29には、操舵角θsとピニオン角θpとのそれぞれにつき、時間的推移の一例がグラフで表わされている。この例においては、時刻t1において、操舵角θsもピニオン角θpも停止状態にある。その後、ピニオン角θpは一定に維持されるのに対し、操舵角θsは増加し、やがて時刻t2において、アクティブ操舵が開始され、ピニオン角θpが増加する。
図30には、ピニオン角θpと操舵トルクTsとの関係が、図8に示す操舵角θsと操舵反力Treとの関係を表わすグラフと同様なグラフで表わされている。このグラフにおいては、時刻t1において操舵角θsもピニオン角θpも定常状態にあり、かつ、ステアリングホイール14が完全な保舵状態にあることが、点P1で示し部分に表わされている。
これに対し、時刻t2の直前、すなわち、アクティブ操舵の開始直前において、操舵トルクTsが、完全な保舵状態における操舵トルクTsに対して増加していることが、点P2で示す部分に表わされている。そして、時刻t2において、アクティブ操舵が開始されると、ピニオン角θpが変化して操舵トルクTsも変化する。
仮に、時刻t1においてアクティブ操舵が開始されたならば、そのときの第1部分補償トルクTcon1は、部材間摩擦トルクTfricと一致するように決定されるべきである。しかし、時刻t2においてアクティブ操舵が開始された場合にも、第1部分補償トルクTcon1を部材間摩擦トルクTfricと一致するように決定してそれを電気パワーステアリング26によって実現すると、アシストトルクが過剰に発生させられることになる。
なぜなら、図30に示すように、時刻t2においては、操舵トルクTsが既にΔTc増加させられており、アクティブ操舵中に部材間摩擦トルクTfricを補償するために追加するアシストトルクは、図30に示すTcon1であって、部材間摩擦トルクTfricからΔTcを引き算した値で足りるからである。
以上説明した知見を背景にして、図27に示す補正値演算プログラムの各回の実行時には、まず、S201において、フラグ1およびフラグ2が共に0に設定される。さらに、補正値ΔTcおよび直前操舵トルクTs(n−1)が共に0に設定される。
次に、S202において、フラグ1が0であるか否かが判定される。今回は、0であるから、判定がYESとなり、S203において、操舵速度Vsおよびピニオン速度Vpの各現在値が検出される。続いて、S204において、操舵速度Vsの検出値の絶対値がしきい値Aより小さく(0に十分に近く)、かつ、ピニオン速度Vpの検出値の絶対値がしきい値Bより小さい(0に十分に近い)か否かが判定される。
今回は、それら2つの条件が共に成立すると仮定すれば、判定がYESとなり、S205において、操舵トルクTsの現在値が検出され、その検出値と等しくなるように直前操舵トルクts(n−1)が設定される。その後、S206において、フラグ1が1に設定される。続いて、S202に戻る。
今回は、フラグ1が0ではないから、S202の判定がNOとなり、S207において、アクティブ操舵が開始されたか否かが判定される。今回は、開始されていないと仮定すれば、判定がNOとなり、S208において、ピニオン速度Vpの現在値が検出される。続いて、S209において、その検出値の絶対値がしきい値Dより大きいか否かが判定される。今回は、大きいと仮定すれば、判定がYESとなり、この補正値演算プログラムの一回の実行が終了する。これに対し、今回は、ピニオン速度Vpの検出値の絶対値がしきい値Dより大きくはないと仮定すれば、S209の判定がNOとなり、S202に戻る。
S202およびS207ないしS209の実行が繰り返されるうちに、アクティブ操舵が開始されてS207の判定がYESとなれば、S210に移行する。このS210においては、フラグ2が0であるか否かが判定される。今回は、0であるから、判定がYESとなり、S211において、フラグ2が1に設定される。その後、S212において、ピニオン速度Vpの現在値が検出され、続いて、S213において、その検出値の絶対値がしきい値Cより大きい(ピニオン軸32が回転し始めた)か否かが判定される。
今回は、ピニオン速度Vpの検出値の絶対値がしきい値Cより大きくはないと仮定すれば、S213の判定がNOとなり、S214およびS215がスキップされてS202に戻る。これに対し、今回は、ピニオン速度Vpの検出値の絶対値がしきい値Cより大きいと仮定すれば、S213の判定がYESとなり、S214に移行する。
このS214においては、操舵トルクTsの現在値が検出され、その検出値と等しくなるように現在操舵トルクTs(n)が設定される。続いて、S215において、その現在操舵トルクTs(n)から直前操舵トルクTs(n−1)を引き算することにより、補償トルクTconを補正するための補正値ΔTcが演算される。その演算された補正値ΔTcはRAM88に格納される。その後、202に戻る。
一方、図28に示す補償トルク補正プログラムの各回の実行時には、まず、S231において、補正値ΔTcの最新値がRAM88から読み込まれる。次に、S232において、前記第1ないし第5実施形態と同様にして取得された補償トルクTconがROM86またはRAM88から読み込まれる。
続いて、S233において、その読み込まれた補償トルクTconから、上記読み込まれた補正値ΔTcを引き算することにより、補償トルクTconが補正される。その後、S234において、その補正された補償トルクTconが、前記パワーアシスト制御プログラムまたはアシスト制御部108に対して出力される。
以上で、この補償トルク補正プログラムの一回の実行が終了する。
以上の説明から明らかなように、本実施形態においては、コンピュータ82のうち、図27に示す補正値演算プログラムと、図28に示す補償トルク補正プログラムと、図9または図11に示す補償トルク決定プログラムとを実行する部分が、前記(14)項における「第7決定手段」の一例を構成しているのである。
次に、本発明の第7実施形態を説明する。ただし、本実施形態は、第6実施形態と共通する要素が多く、異なるのは、補償トルク補正プログラムに関する要素のみであるため、共通する要素については、同一の符号または名称を使用して引用することにより、詳細な説明を省略し、異なる要素についてのみ、詳細に説明する。
図31には、本実施形態におけるECU80のコンピュータ82によって実行される補償トルク補正プログラムの内容がフローチャートで概念的に表されている。
この補償トルク補正プログラムの各回の実行時には、まず、S251において、経過時間tが0に設定される。次に、S252において、RAM88から前記補正値ΔTcが読み込まれる。続いて、S253において、その読み込まれた補正値ΔTcの絶対値がしきい値Eより大きい(実質的に0ではない)か否かが判定される。今回は、しきい値Eより大きいと仮定すれば、判定がYESとなり、S254に移行する。
このS254においては、経過時間Tが微小増分Δt(実行周期)だけ増加させられ、その後、S255において、前記読み込まれた補正値ΔTcが、時定数Tのもとに減衰させられる。この減衰は、例えば図32にグラフで表すように、経過時間tと共に次第に減少し、やがて0となるように行われる。
続いて、図31のS256において、第1ないし第6実施形態と同様にして取得された補償トルクTconがROM86またはRAM88から読み込まれる。その後、S257において、その読み込まれた補償トルクTconから補正値ΔTcの減衰値が引き算されることにより、補償トルクTconが補正される。その補正された補償トルクTconは、第6実施形態とは異なり、時間の経過につれて、補正前の値に次第に復元するように変化させられる。
続いて、S258において、その補正された補償トルクTconが、前記パワーアシスト制御プログラムまたはアシスト制御部108に対して出力される。
以上で、この補償トルク補正プログラムの一回の実行が終了する。
次に、本発明の第8実施形態を説明する。ただし、本実施形態は、第1ないし第7実施形態と共通する要素が多いため、共通する要素については、同一の符号または名称を使用して引用することにより、詳細な説明を省略し、異なる要素についてのみ、詳細に説明する。
第1ないし第7実施形態においては、部材間摩擦トルクTfricが固定値として扱われている。図7に示すヒステリシスの幅が変化しないと仮定して部材間摩擦トルクTfricが設定されているのである。
これに対し、本実施形態においては、部材間摩擦トルクTfricが、例えば、ラックアンドピニオン機構38における接触歯面間の法線力によって変化するという事実に着目し、部材間摩擦トルクTfricを精度よく推定し、ひいては、アクティブ操舵に起因する操舵反力Treの変化分を正確に補償して操舵フィーリングを向上させるために、摩擦トルク補正プログラムがECU80のコンピュータ82によって実行される。
図33には、その摩擦トルク補正プログラムの内容がフローチャートで概念的に表わされている。この摩擦トルク補正プログラムの各回の実行時には、まず、S301において、部材間摩擦トルクTfricの基本値Tfric0がROM86から読み込まれる。次に、S302において、操舵トルクTsの検出値と、電気パワーステアリング26のモータ62に供給されたアシスト電流Iの検出値とに基づき、ラック軸30に作用する軸力Fが取得される。
続いて、S303において、その取得された軸力Fに対応する係数Gが、それら軸力Fと係数Gとの間に予め設定された関係に従って決定される。係数Gは、基本値Tfric0を補正するためにそれに乗じられる係数である。また、それら係数Gと軸力Fとの間に設定された関係は、例えば、軸力Fが増加するにつれて係数Gが1から増加する関係とされる。図34には、その関係の一例がグラフで表されている。
その後、図33のS304において、その決定された係数Gが基本値Tfric0に掛け算されることにより、部材間摩擦トルクTfricが補正される。その補正された部材間摩擦トルクTfricは、補償トルクTconの次回の決定に備えて、RAM88に格納される。
以上で、この摩擦トルク補正プログラムの一回の実行が終了する。
以上の説明から明らかなように、本実施形態においては、コンピュータ82のうち、図33に示す摩擦トルク補正プログラムと、図9または図11に示す補償トルク決定プログラムとを実行する部分が、前記(16)項における「第8決定手段」の一例を構成しているのである。
次に、本発明の第9実施形態を説明する。ただし、本実施形態は、第2実施形態と共通する要素が多いため、共通する要素については、同一の符号または名称を使用して引用することにより、詳細な説明を省略し、異なる要素についてのみ、詳細に説明する。
第2実施形態においては、図12および図13に示すように、操舵速度Vsに基づく第1部分補償トルクTcon1の絶対値の最大値と、ピニオン速度Vpに基づく第2部分補償トルクTcon2の絶対値の最大値とが、共に、部材間摩擦トルクTfricと等しくなるように設定されている。
これに対し、本実施形態においては、図35に示すように、第1部分補償トルクTcon1が操舵速度Vsに対する傾きとヒシテリシスとを有するように変化させられる。さらに、本実施形態においては、第2実施形態において図11のS135の実行によって決定された第1部分補償トルクTcon1が、それに係数Hが乗じられることによって補正される。その結果、第1部分補償トルクTcon1の絶対値の最大値が、部材間摩擦トルクTfricに乗じられる係数Hの値に応じて変化させられる。
したがって、係数Hが1より小さい場合には、1である場合に比較して第1部分補償トルクTcon1が減少し、例えば、第1部分補償トルクTcon1の絶対値の最大値については、第2部分補償トルクTcon2の絶対値の最大値(部材間摩擦トルクTfricに等しい。)より小さくなる。第1部分補償トルクTcon1が減少することは、アシストトルクのうち、操舵速度Vsに寄与する部分が、ピニオン速度Vpに寄与する部分より小さくなることを意味する。このことは、ひいては、アクティブ操舵中に、操舵反力Treが、操舵速度Vsの方がピニオン速度Vpより鈍感になり、操舵フィーリングが重厚なものになり、運転者の安心感が増すことを意味する。
さらに、本実施形態においては、車両の走行安定性が通常より低下した場合に、アクティブ操舵によってオートカウンタステアリングが行われるようになっており、そのオートカウンタステアリングの実行時に、運転者の安心感を向上させるべく、係数Hが1より小さい値に減少させられるようになっている。
それらの処理を実行するため、本実施形態においては、ECU80のコンピュータ82により補償トルク補正プログラムが実行される。この補償トルク補正プログラムは、図11におけるS135において決定された第1部分補償トルクTcon1を係数Hで選択的に補正するために実行される。
図36には、その補償トルク補正プログラムの内容がフローチャートで概念的に表されている。この補償トルク補正プログラムの各回の実行時には、まず、S331において、図4のS1と同様にして、車両状態量が検出される。次に、S332において、図4のS2と同様にして、車両安定性が通常より低下したか否かが判定される。
今回は、車両安定性が通常より低下していないと仮定すれば、S332の判定がNOとなり、S333において、係数Hが値H1(=1)と等しい値に設定される。続いて、S334において、図11のS135の実行によって決定されてRAM88に格納された第1部分補償トルクTcon1が読み出される。
その後、S335において、その読み出された第1部分補償トルクTcon1に、前記設定された係数Hが乗じられることにより、その第1部分補償トルクTcon1が補正される。今回は、係数Hが1であるため、もとの第1部分補償トルクTcon1に対する補正は実質的には行われない。
続いて、S336において、その補正された第1部分補償トルクTcon1が、図11のS137の次回の実行に備えて出力される。具体的には、補正された第1部分補償トルクTcon1がRAM88に格納される。
以上で、この補償トルク補正プログラムの一回の実行が終了する。
これに対し、今回は、車両安定性が低下したと仮定すれば、S332の判定がYESとなり、S337において、今回は、運転者の安心感を向上させることが必要であると判定される。
続いて、S338において、値H1より小さい値H2と等しくなるように係数Hが設定される。その後、S334において、RAM88からもとの第1部分補償トルクTcon1が読み出される。
続いて、S335において、その読み出された第1部分補償トルクTcon1に、上記設定された係数Hが乗じられ、これにより、もとの第1部分補償トルクTcon1が補正される。今回は、係数Hが1より小さいため、もとの第1部分補償トルクTcon1より小さい値が、補正後の第1部分補償トルクTcon1とされる。
その後、S336において、その補正された第1部分補償トルクTcon1が、図11のS137の次回の実行に備えて出力される。具体的には、補正された第1部分補償トルクTcon1がRAM88に格納される。
以上で、この補償トルク補正プログラムの一回の実行が終了する。
以上の説明から明らかなように、本実施形態においては、コンピュータ82のうち図36に示す補償トルク補正プログラムと、図9に示す補償トルク決定プログラムとを実行する部分が、前記(18)または(19)項における「第9決定手段」の一例を構成しているのである。
次に、本発明の第10実施形態を説明する。ただし、本実施形態は、第1実施形態と共通する要素が多いため、共通する要素については、同一の符号または名称を使用して引用することにより、詳細な説明を省略し、異なる要素についてのみ、詳細に説明する。
図7に示すように、前述の操舵反力制御を実行しないと、操舵反力Treに、アクティブ操舵により、部材間摩擦力に基づく第1変化ΔT1と、タイヤ−路面間摩擦力に基づく第2変化ΔT2とが発生する。
第2変化ΔT2の発生を抑制するためには、操舵角θsと操舵反力Treとの勾配を検出することが必要である。この勾配は、図37に示すように、車輪20の転舵角θw(アクティブ操舵によって発生させられる。)と、ラック軸30に作用する軸力Fとの勾配に相当する。
したがって、転舵角θwと軸力Fとが判明すれば、それらの勾配が判明し、ひいては、操舵角θsと操舵反力Treとの勾配も判明する。この勾配を用いれば、第2変化ΔT2の発生を抑制するために発生させるべきアシストトルクTaも判明する。このアシストトルクTa(正確には、アクティブ操舵中のアシストトルクTaの変化量ΔTa)は、転舵角θw(正確には、アクティブ操舵中の転舵角θwの変化量Δθw)にアシスト比γを掛け算することによって演算できる。
一方、ラック軸30に作用する軸力Fは、運転者の操舵トルクTsと、電気パワーステアリング26のモータ62によるアシストトルクTaとの和である。したがって、操舵トルクTsと、そのモータ62に供給されるアシスト電流Iとが判明すれば、ラック軸30に作用する軸力Fを検出することができる。
さらに、転舵角θwは、ラック軸30の直線変位位置を検出するラック位置センサ134(図3参照)を用いて検出することが可能である。
ただし、それら軸力Fおよび転舵角θwは、ステアリングホイール14が保舵状態にあるためにそれら物理量が変動しない場合には、比較的高精度で検出できるが、転舵状態にある場合には、それら物理量の検出値にノイズが混入し易い。そのため、転舵状態においては、タイヤ−路面間摩擦力に影響を及ぼす路面μを推定し、その推定値からアシスト比γを決定することが望ましい。
本実施形態においては、第2変化ΔT2の発生を抑制するために変化させるべきアシストトルクΔTaを第3部分補償トルクTcon3として決定するために、第3部分補償トルク決定プログラムがECU80のコンピュータ82によって実行される。
図38には、その第3部分補償トルク決定プログラムの内容がフローチャートで概念的に表わされている。
この第3部分補償トルク決定プログラムの各回の実行時には、まず、S351において、操舵速度θsの検出値に基づき、ステアリングホイール14が保舵状態にあるか否かが判定される。今回は、保舵状態にあると仮定すれば、判定がYESとなり、S352において、前述のようにして、ラック軸30に作用する軸力Fが検出される。続いて、S353において、前述のようにして、車輪20の転舵角θwが検出される。
その後、S354において、それら検出された軸力Fおよび転舵角θwに基づき、それらとアシスト比γとの間に予め定められた規則に従って今回のアシスト比γが決定される。
続いて、S355において、今回のアクティブ操舵に起因する転舵角θwの変化量Δθwが決定される。その後、S356において、その決定された変化量Δθwと、前記決定されたアシスト比γとの積として、アシストトルクTaの変化量ΔTaが決定される。
続いて、S357において、その決定された変化量ΔTaと等しくなるように、第3部分補償トルクTcon3が決定される。その後、S358において、その決定された第3部分補償トルクTcon3がRAM88に格納される。
以上で、この第3部分補償トルク決定プログラムの一回の実行が終了する。
以上、ステアリングホイール14が保舵状態にあると仮定したが、保舵状態にはない場合には、S351の判定がNOとなり、S359に移行する。
このS359においては、路面μを推定するための情報、例えば、車輪20のスリップ率が検出され、その検出された情報に基づいて路面μが推定される。その後、S360において、その推定された路面μに基づき、それとアシスト比γとの間に予め定められた規則に従って今回のアシスト比γが決定される。以下、前述の場合と同様に、S355ないしS358が実行される。
図39には、本実施形態においてECU80のコンピュータ82によって実行される補償トルク決定プログラムの内容がフローチャートで概念的に表わされている。この補償トルク決定プログラムは、図11の補償トルク決定プログラムと共通するステップが多いため、異なるステップについてのみ詳細に説明し、共通するステップについては簡単に説明する。
本実施形態における補償トルク決定プログラムの各回の実行時には、まず、S401ないしS406が図11におけるS131ないしS136と同様にして実行される。次に、S407において、上述の第3部分補償トルク決定プログラムの実行によって決定されてRAM88に格納された第3部分補償トルクTcon3がRAM88から読み込まれる。
続いて、S408において、S405において決定された第1部分補償トルクTcon1と、S406において決定された第2部分補償トルクTcon2と、上記読み込まれた第3部分補償トルクTcon3との和と等しくなるように、総合的な補償トルクTconが決定される。
以上で、この補償トルク決定プログラムの一回の実行が終了する。
以上の説明から明らかなように、本実施形態においては、コンピュータ82のうち、図38に示す第3部分補償トルク決定プログラムと、図39に示す補償トルク決定プログラムとを実行する部分が、前記(21)項における「第10決定手段」の一例を構成しているのである。
以上、本発明の実施の形態のいくつかを図面に基づいて詳細に説明したが、これらは例示であり、前記[発明の開示]の欄に記載の態様を始めとして、当業者の知識に基づいて種々の変形、改良を施した他の形態で本発明を実施することが可能である。