CN114812597A - 道路引导图示生成方法、装置、导航方法及可读存储介质 - Google Patents
道路引导图示生成方法、装置、导航方法及可读存储介质 Download PDFInfo
- Publication number
- CN114812597A CN114812597A CN202210118420.4A CN202210118420A CN114812597A CN 114812597 A CN114812597 A CN 114812597A CN 202210118420 A CN202210118420 A CN 202210118420A CN 114812597 A CN114812597 A CN 114812597A
- Authority
- CN
- China
- Prior art keywords
- degree
- target lane
- road
- road section
- arc
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images






Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/34—Route searching; Route guidance
- G01C21/36—Input/output arrangements for on-board computers
- G01C21/3626—Details of the output of route guidance instructions
- G01C21/3632—Guidance using simplified or iconic instructions, e.g. using arrows
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Automation & Control Theory (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Traffic Control Systems (AREA)
Abstract
本公开实施例公开了一种道路引导图示生成方法、装置、导航方法及可读存储介质,所述方法包括:确定出度路段目标车道和入度路段目标车道;根据所述出度路段目标车道与入度路段目标车道之间的位置关系确定道路引导类型;根据所述道路引导类型,获取道路引导图示生成参数;根据所述道路引导图示生成参数,生成道路引导图示。该技术方案对于不同道路引导类型采取不同绘制道路引导图示生成策略,使得道路引导图示的转折弧度可控制且与道路引导类型相对应,避免出现同一出入度角度对应的道路引导图示存在较大的差异的情况,从而提升了用户的使用体验。
Description
技术领域
本公开实施例涉及渲染技术领域,具体涉及一种道路引导图示生成方法、装置、导航方法及可读存储介质。
背景技术
随着社会的发展和进步,道路上的车辆越来越多,路况也越来越复杂,因此很多用户的出行都依赖于导航路线的指引。在导航指引时,对于车辆在路口的转弯动作通常使用具有转弯形态的箭头来进行引导,现有技术中通常使用传统二阶贝塞尔曲线绘制方法来绘制引导箭头,比如引导箭头的转弯处使用二阶贝塞尔曲线插值算法和高斯平滑来绘制,但二阶贝塞尔曲线插值算法的插入点依赖于路口的出度路段和入度路段的出入度角度,以及出度路段的末端坐标和入度路段的起始坐标,对于同一出入度角度,若坐标点位置不同,则插入的点将会完全不同,这将会导致同一出入度角度对应的引导箭头存在较大的差异。由上可知,传统二阶贝塞尔曲线绘制方法得到的引导箭头的转弯形态不规则、可控性差、难以约束,进而降低了用户的使用体验。
发明内容
本公开实施例提供一种道路引导图示生成方法、装置、导航方法及可读存储介质。
第一方面,本公开实施例中提供了一种道路引导图示生成方法。
具体的,所述道路引导图示生成方法,包括:
确定出度路段目标车道和入度路段目标车道;
根据所述出度路段目标车道与入度路段目标车道之间的位置关系确定道路引导类型;
根据所述道路引导类型,获取道路引导图示生成参数;
根据所述道路引导图示生成参数,生成道路引导图示。
第二方面,本公开实施例中提供了一种道路引导图示生成装置。
具体的,所述道路引导图示生成装置,包括:
第一确定模块,被配置为确定出度路段目标车道和入度路段目标车道;
第二确定模块,被配置为根据所述出度路段目标车道与入度路段目标车道之间的位置关系确定道路引导类型;
获取模块,被配置为根据所述道路引导类型,获取道路引导图示生成参数;
生成模块,被配置为根据所述道路引导图示生成参数,生成道路引导图示。
第三方面,本公开实施例提供了一种电子设备,包括存储器和处理器,所述存储器用于存储一条或多条支持道路引导图示生成装置执行上述道路引导图示生成方法的计算机指令,所述处理器被配置为用于执行所述存储器中存储的计算机指令。所述道路引导图示生成装置还可以包括通信接口,用于道路引导图示生成装置与其他设备或通信网络通信。
第四方面,本公开实施例提供了一种计算机可读存储介质,用于存储道路引导图示生成装置所用的计算机指令,其包含用于执行上述道路引导图示生成方法为道路引导图示生成装置所涉及的计算机指令。
第五方面,本公开实施例提供了一种导航方法,其中,获取至少基于起点、终点及路线规划数据的导航路线,基于所述导航路线进行导航引导,所述路线规划数据是基于上述任意一项方法实现的。
本公开实施例提供的技术方案可包括以下有益效果:
上述技术方案通过确定道路引导类型来获取不同的道路引导图示生成参数,再根据道路引导图示生成参数生成相应的绘制道路引导图示。该技术方案对于不同道路引导类型采取不同绘制道路引导图示生成策略,使得道路引导图示的转折弧度可控制且与道路引导类型相对应,避免出现同一出入度角度对应的道路引导图示存在较大的差异的情况,从而提升了用户的使用体验。
应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本公开实施例。
附图说明
结合附图,通过以下非限制性实施方式的详细描述,本公开实施例的其它特征、目的和优点将变得更加明显。在附图中:
图1示出根据本公开一实施方式的道路引导图示生成方法的流程图;
图2A-图2F示出根据本公开一实施方式的道路引导图示生成示意图;
图3示出根据本公开一实施方式的道路引导图示生成装置的结构框图;
图4是适于用来实现根据本公开一实施方式的道路引导图示生成方法的计算机系统的结构示意图。
具体实施方式
下文中,将参考附图详细描述本公开实施例的示例性实施方式,以使本领域技术人员可容易地实现它们。此外,为了清楚起见,在附图中省略了与描述示例性实施方式无关的部分。
在本公开实施例中,应理解,诸如“包括”或“具有”等的术语旨在指示本说明书中所公开的特征、数字、步骤、行为、部件、部分或其组合的存在,并且不欲排除一个或多个其他特征、数字、步骤、行为、部件、部分或其组合存在或被添加的可能性。
另外还需要说明的是,在不冲突的情况下,本公开中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本公开实施例。
本公开实施例提供的技术方案通过确定道路引导类型来获取不同的道路引导图示生成参数,再根据道路引导图示生成参数生成相应的绘制道路引导图示。该技术方案对于不同道路引导类型采取不同绘制道路引导图示生成策略,使得道路引导图示的转折弧度可控制且与道路引导类型相对应,避免出现同一出入度角度对应的道路引导图示存在较大的差异的情况,从而提升了用户的使用体验。
图1示出根据本公开一实施方式的道路引导图示生成方法的流程图,如图1所示,所述道路引导图示生成方法包括以下步骤S101-S104:
在步骤S101中,确定出度路段目标车道和入度路段目标车道;
在步骤S102中,根据所述出度路段目标车道与入度路段目标车道之间的位置关系确定道路引导类型;
在步骤S103中,根据所述道路引导类型,获取道路引导图示生成参数;
在步骤S104中,根据所述道路引导图示生成参数,生成道路引导图示。
上文提及,随着社会的发展和进步,道路上的车辆越来越多,路况也越来越复杂,因此很多用户的出行都依赖于导航路线的指引。在导航指引时,对于车辆在路口的转弯动作通常使用具有转弯形态的箭头来进行引导,现有技术中通常使用传统二阶贝塞尔曲线绘制方法来绘制引导箭头,比如引导箭头的转弯处使用二阶贝塞尔曲线插值算法和高斯平滑来绘制,但二阶贝塞尔曲线插值算法的插入点依赖于路口的出度路段和入度路段的出入度角度,以及出度路段的末端坐标和入度路段的起始坐标,对于同一出入度角度,若坐标点位置不同,则插入的点将会完全不同,这将会导致同一出入度角度对应的引导箭头存在较大的差异。由上可知,传统二阶贝塞尔曲线绘制方法得到的引导箭头的转弯形态不规则、可控性差、难以约束,进而降低了用户的使用体验。
考虑到上述问题,在该实施方式中,提出一种道路引导图示生成方法,该方法通过确定道路引导类型来获取不同的道路引导图示生成参数,再根据道路引导图示生成参数生成相应的绘制道路引导图示。该技术方案对于不同道路引导类型采取不同绘制道路引导图示生成策略,使得道路引导图示的转折弧度可控制且与道路引导类型相对应,避免出现同一出入度角度对应的道路引导图示存在较大的差异的情况,从而提升了用户的使用体验。
在本公开一实施方式中,所述道路引导图示生成方法可适用于可执行道路引导图示生成的计算机、计算设备、电子设备、服务器、服务集群等。
在本公开一实施方式中,所述道路引导图示指的是用于进行道路引导的图示,比如转弯箭头等等。为了便于解释和说明,下文中将以所述道路引导图示为转弯箭头为例对于本公开进行详细的描述。
在本公开一实施方式中,所述入度路段目标车道指的是车辆在进入某一路口前所在的路段中的车道,比如拐弯前所在的路段中的车道,也即在拐弯时将要驶出的车道,所述出度路段目标车道指的是车辆在驶出某一路口后所在的路段中的车道,比如拐弯后将要驶入的车道,所述出度路段目标车道和入度路段目标车道可根据车辆当前的行驶数据来确定。所述入度路段目标车道和出度路段目标车道之间有可能存在多种位置关系,比如垂直、平行、相错等等。
在本公开一实施方式中,所述道路引导类型指的是道路引导的类型,其与所述出度路段目标车道与入度路段目标车道之间的位置关系相关,其中,所述道路引导类型可包括以下类型中的一种或多种:直角转弯、平行掉头转弯、锐角转弯、钝角转弯和平行转弯。
在本公开一实施方式中,所述道路引导图示生成参数指的是用于生成道路引导图示所需要的参数,比如出度路段目标车道尺寸、入度路段目标车道尺寸、出度路段目标车道与入度路段目标车道之间的距离、路口边界位置等等。其中,所述出度路段目标车道尺寸指的是所述出度路段目标车道的宽度、长度等尺寸;所述入度路段目标车道尺寸指的是所述入度路段目标车道的宽度、长度等尺寸;所述出度路段目标车道与入度路段目标车道之间的距离指的是所述出度路段目标车道的中心线与入度路段目标车道的中心线之间的垂直距离;所述路口边界位置指的是与路口相通的多个车道停止线所形成的边界。
在上述实施方式中,首先根据车辆当前的行驶数据确定车辆的出度路段目标车道和入度路段目标车道,然后根据所述出度路段目标车道与入度路段目标车道之间的位置关系确定道路引导类型,然后根据所述道路引导类型获取相应的道路引导图示生成参数,最后即可根据所述道路引导图示生成参数生成相应的道路引导图示。
在本公开一实施方式中,所述步骤S102,即根据所述出度路段目标车道与入度路段目标车道之间的位置关系确定道路引导类型的步骤,可包括以下步骤:
当所述出度路段目标车道与入度路段目标车道之间的夹角处于直角范围时,所述道路引导类型为直角转弯;
当所述出度路段目标车道与入度路段目标车道之间的夹角处于平角范围且所述出度路段目标车道与入度路段目标车道行进方向相反时,所述道路引导类型为平行掉头转弯;
当所述出度路段目标车道与入度路段目标车道之间的夹角处于锐角范围时,所述道路引导类型为锐角转弯;
当所述出度路段目标车道与入度路段目标车道之间的夹角处于钝角范围时,所述道路引导类型为钝角转弯;
当所述出度路段目标车道与入度路段目标车道之间的夹角处于平角范围且所述出度路段目标车道与入度路段目标车道行进方向相同时,所述道路引导类型为平行转弯。
其中,所述直角范围指的是直角增加或者减小预设角度而形成的角度范围,若所述出度路段目标车道与入度路段目标车道之间的夹角落入所述直角范围,则认为所述出度路段目标车道与入度路段目标车道之间的位置关系为近似直角,则所述道路引导类型就可确定为直角转弯。其中,所述预设角度为一较小角度,比如,所述预设角度可设置为5度,以使得处于所述直角范围内的角度为直角或者近似直角。
其中,所述平角范围指的是平角增加或者减小预设角度而形成的角度范围,若所述出度路段目标车道与入度路段目标车道之间的夹角落入所述平角范围,则认为所述出度路段目标车道与入度路段目标车道之间的位置关系为近似平行,进一步地,若所述出度路段目标车道与入度路段目标车道的行进方向相反,说明车辆想要平行掉头,因此此时所述道路引导类型可确定为平行掉头转弯,类似地,若所述出度路段目标车道与入度路段目标车道的行进方向相同,说明车辆想要交错行驶,因此此时所述道路引导类型可确定为平行转弯。其中,与上文类似,所述预设角度为一较小角度,比如,所述预设角度可设置为5度,以使得处于所述平角范围内的角度为平角或者近似平角。
其中,所述锐角范围指的是锐角所处的角度范围,若所述出度路段目标车道与入度路段目标车道之间的夹角落入所述锐角范围,则认为所述出度路段目标车道与入度路段目标车道之间的位置关系为锐角,则所述道路引导类型就可确定为锐角转弯。需要说明的是,所述锐角范围与所述直角范围和平角范围之间均不存在重叠,比如,所述锐角范围可设置为0度+预设角度至90度-预设角度所形成的角度范围。
其中,所述钝角范围指的是钝角所处的角度范围,若所述出度路段目标车道与入度路段目标车道之间的夹角落入所述钝角范围,则认为所述出度路段目标车道与入度路段目标车道之间的位置关系为钝角,则所述道路引导类型就可确定为钝角转弯。需要说明的是,所述钝角范围与所述直角范围和平角范围之间也不存在重叠,比如,所述钝角范围可设置为90度+预设角度至180度-预设角度所形成的角度范围。
在本公开一实施方式中,所述步骤S103,即根据所述道路引导类型,获取道路引导图示生成参数的步骤,可包括以下步骤:
当所述道路引导类型为直角转弯、锐角转弯、钝角转弯或平行转弯时,所述道路引导图示生成参数包括:出度路段目标车道尺寸、入度路段目标车道尺寸和相应路口边界位置;
当所述道路引导类型为平行掉头转弯时,所述道路引导图示生成参数包括:出度路段目标车道尺寸、入度路段目标车道尺寸、出度路段目标车道与入度路段目标车道之间的距离和相应路口边界位置。
在该实施方式中,当所述道路引导类型为直角转弯、锐角转弯、钝角转弯或平行转弯时,只需出度路段目标车道尺寸、入度路段目标车道尺寸和相应路口边界位置等参数即可生成所述参数生成道路引导图示;而当所述道路引导类型为平行掉头转弯时,除了上述道路引导图示生成参数,还需获取出度路段目标车道与入度路段目标车道之间的距离作为所述道路引导图示生成参数来生成道路引导图示。
获取得到所述道路引导图示生成参数后,就可根据所述道路引导图示生成参数来生成道路引导图示了,下文以不同道路引导类型为例分别对于道路引导图示的生成进行解释和说明。
当所述道路引导类型为直角转弯时,所述步骤S104,即根据所述道路引导图示生成参数,生成道路引导图示的步骤,可包括以下步骤:
根据所述出度路段目标车道尺寸和入度路段目标车道尺寸确定所述出度路段目标车道尺寸的出度中心延长线和入度路段目标车道的入度中心延长线,得到两条中心延长线的交点;
从交点沿所述出度路段目标车道方向和入度路段目标车道反方向分别延长第一距离,得到出度端点和入度端点,其中,所述第一距离为从所述交点沿所述出度路段目标车道方向和入度路段目标车道反方向分别延长至路口边界的较短距离的第一预设比例;
以所述出度端点和入度端点为切点,生成中心线与所述出度中心延长线和入度中心延长线相切的圆弧,其中,所述圆弧的角度为所述出度路段目标车道和入度路段目标车道之间的夹角,所述圆弧的宽度为预设宽度;
自所述圆弧靠近出度路段目标车道的端面,沿着所述出度路段目标车道的方向生成箭头,其中,所述箭头的宽度为预设宽度;
自所述圆弧靠近入度路段目标车道的端面,沿着所述入度路段目标车道的反方向生成箭尾,其中,所述箭尾的宽度为预设宽度;
顺次连接所述箭头、圆弧和箭尾,生成道路引导图示。
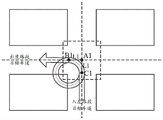
在该实施方式中,当所述道路引导类型为直角转弯,生成道路引导图示时,如图2A所示:
首先根据所述出度路段目标车道尺寸和入度路段目标车道尺寸确定所述出度路段目标车道尺寸的出度中心延长线和入度路段目标车道的入度中心延长线,然后使两条中心延长线相交,得到交点A1;
然后从交点A1出发,沿所述出度路段目标车道方向和入度路段目标车道反方向分别延长第一距离L1,得到出度端点B1和入度端点C1,其中,所述第一距离L1为从所述交点A1沿所述出度路段目标车道方向延长至路口边界的距离与从所述交点A1沿所述入度路段目标车道反方向延长至路口边界的距离中的较短距离的第一预设比例,其中,所述第一预设比例可根据实际应用的需要进行设置,比如可设置为2/3,本公开对于所述第一预设比例的具体取值不作特别限定;
然后以所述出度端点B1和入度端点C1为切点,生成中心线与所述出度中心延长线和入度中心延长线相切的、具有预设宽度的、角度为所述出度路段目标车道和入度路段目标车道之间的夹角的圆弧,即所述圆弧的中心线与所述出度中心延长线和入度中心延长线相切,且切点分别为所述出度端点B1和入度端点C1;
然后自所述圆弧靠近出度路段目标车道的端面,沿着所述出度路段目标车道的方向生成具有同样预设宽度的箭头,自所述圆弧靠近入度路段目标车道的端面,沿着所述入度路段目标车道的反方向生成具有同样预设宽度箭尾;
最后将所述箭头、圆弧和箭尾顺次连接起来,即可生成所述道路引导图示。
当所述道路引导类型为锐角转弯时,所述步骤S104,即根据所述道路引导图示生成参数,生成道路引导图示的步骤,可包括以下步骤:
根据所述出度路段目标车道尺寸和入度路段目标车道尺寸确定所述出度路段目标车道尺寸的出度中心延长线和入度路段目标车道的入度中心延长线,得到两条中心延长线的交点;
从交点沿所述出度路段目标车道方向和入度路段目标车道反方向分别延长第二距离,得到出度端点和入度端点,其中,所述第二距离为从所述交点沿所述出度路段目标车道方向和入度路段目标车道反方向分别延长至路口边界的较短距离减去第一预设距离;
以所述出度端点和入度端点为切点,生成中心线与所述出度中心延长线和入度中心延长线相切的圆弧,其中,所述圆弧的角度为出度端点、交点和入度端点形成的夹角的补角,所述圆弧的宽度为预设宽度;
自所述圆弧靠近出度路段目标车道的端面,沿着所述出度路段目标车道的方向生成箭头,其中,所述箭头的宽度为预设宽度;
自所述圆弧靠近入度路段目标车道的端面,沿着所述入度路段目标车道的反方向生成箭尾,其中,所述箭尾的宽度为预设宽度;
顺次连接所述箭头、圆弧和箭尾,生成道路引导图示。
在该实施方式中,当所述道路引导类型为锐角转弯,生成道路引导图示时,如图2B所示:
首先根据所述出度路段目标车道尺寸和入度路段目标车道尺寸确定所述出度路段目标车道尺寸的出度中心延长线和入度路段目标车道的入度中心延长线,然后使两条中心延长线相交,得到交点A2;
然后从交点A2出发,沿所述出度路段目标车道方向和入度路段目标车道反方向分别延长第二距离L2,得到出度端点B2和入度端点C2,其中,所述第二距离L2为从所述交点A2沿所述出度路段目标车道方向延长至路口边界的距离与从所述交点A2沿所述入度路段目标车道反方向延长至路口边界的距离中的较短距离再减去第一预设距离得到的距离值,其中,所述第一预设距离可根据实际应用的需要进行设置,比如可设置为3-5米,本公开对于所述第一预设距离的具体取值不作特别限定;
然后以所述出度端点B2和入度端点C2为切点,生成中心线与所述出度中心延长线和入度中心延长线相切的、具有预设宽度的、角度为出度端点B2、交点A2和入度端点C2形成的夹角的补角的圆弧;
然后自所述圆弧靠近出度路段目标车道的端面,沿着所述出度路段目标车道的方向生成具有同样预设宽度的箭头,自所述圆弧靠近入度路段目标车道的端面,沿着所述入度路段目标车道的反方向生成具有同样预设宽度的箭尾;
最后将所述箭头、圆弧和箭尾顺次连接起来,即可生成所述道路引导图示。
当所述道路引导类型为钝角转弯时,所述步骤S104,即根据所述道路引导图示生成参数,生成道路引导图示的步骤,可包括以下步骤:
根据所述出度路段目标车道尺寸和入度路段目标车道尺寸确定所述出度路段目标车道尺寸的出度中心延长线和入度路段目标车道的入度中心延长线,得到两条中心延长线的交点;
从交点沿所述出度路段目标车道方向和入度路段目标车道反方向分别延长第三距离,得到出度端点和入度端点,其中,所述第三距离为从所述交点沿所述出度路段目标车道方向和入度路段目标车道反方向分别延长至路口边界的较短距离的第二预设比例;
以所述出度端点和入度端点为切点,生成中心线与所述出度中心延长线和入度中心延长线相切的圆弧,其中,所述圆弧的角度为出度端点、交点和入度端点形成的夹角的补角,所述圆弧的宽度为预设宽度;
自所述圆弧靠近出度路段目标车道的端面,沿着所述出度路段目标车道的方向生成箭头,其中,所述箭头的宽度为预设宽度;
自所述圆弧靠近入度路段目标车道的端面,沿着所述入度路段目标车道的反方向生成箭尾,其中,所述箭尾的宽度为预设宽度;
顺次连接所述箭头、圆弧和箭尾,生成道路引导图示。
在该实施方式中,当所述道路引导类型为钝角转弯,生成道路引导图示时,如图2C所示:
首先根据所述出度路段目标车道尺寸和入度路段目标车道尺寸确定所述出度路段目标车道尺寸的出度中心延长线和入度路段目标车道的入度中心延长线,然后使两条中心延长线相交,得到交点A3;
然后从交点A3出发,沿所述出度路段目标车道方向和入度路段目标车道反方向分别延长第三距离L3,得到出度端点B3和入度端点C3,其中,所述第三距离L3为从所述交点A3沿所述出度路段目标车道方向延长至路口边界的距离与从所述交点A3沿所述入度路段目标车道反方向延长至路口边界的距离中的较短距离的第二预设比例,其中,所述第二预设比例可根据实际应用的需要进行设置,比如可设置为2/3,所述第二预设比例可设置为与所述第一预设比例相等,也可设置为与所述第一预设比例不相等,本公开对于所述第二预设比例的具体取值不作特别限定;
然后以所述出度端点B3和入度端点C3为切点,生成中心线与所述出度中心延长线和入度中心延长线相切的、具有预设宽度的、角度为出度端点B3、交点A3和入度端点C3形成的夹角的补角的圆弧;
然后自所述圆弧靠近出度路段目标车道的端面,沿着所述出度路段目标车道的方向生成具有同样预设宽度的箭头,自所述圆弧靠近入度路段目标车道的端面,沿着所述入度路段目标车道的反方向生成具有同样预设宽度的箭尾;
最后将所述箭头、圆弧和箭尾顺次连接起来,即可生成所述道路引导图示。
当所述道路引导类型为平行转弯时,所述步骤S104,即根据所述道路引导图示生成参数,生成道路引导图示的步骤,可包括以下步骤:
根据所述出度路段目标车道尺寸和入度路段目标车道尺寸确定所述出度路段目标车道尺寸的出度中心延长线和入度路段目标车道的入度中心延长线,得到两条中心延长线分别与对应路口边界的交点;
从两个交点分别相向延长第二预设距离,得到第一出度端点和第一入度端点,再延长第三预设距离,得到第二出度端点和第二入度端点;
连接所述第二出度端点和第二入度端点,其中,所述第二出度端点和第二入度端点之间的连线长度大于第三预设距离的预设倍数;
在所述第二出度端点和第二入度端点的连线上确定第一切点和第二切点,其中,所述第一切点与所述第二出度端点之间的距离以及所述第二切点与所述第二入度端点之间的距离均为所述第三预设距离;
以所述第一入度端点和第二切点为切点,生成中心线与所述第一入度端点和第二入度端点之间的连线、所述第二入度端点和第二切点之间的连线相切的第一圆弧,其中,所述第一圆弧的角度为第一入度端点、第二入度端点和第二切点形成的夹角的补角,所述第一圆弧的宽度为预设宽度;
以所述第一出度端点和第一切点为切点,生成中心线与所述第一出度端点和第二出度端点之间的连线、所述第二入度端点和第一切点之间的连线相切的第二圆弧,其中,所述第二圆弧的角度为第一出度端点、第二出度端点和第一切点形成的夹角的补角,所述第二圆弧的宽度为预设宽度;
自所述第二圆弧靠近出度路段目标车道的端面,沿着所述出度路段目标车道的方向生成箭头,其中,所述箭头的宽度为预设宽度;
自所述第一圆弧靠近入度路段目标车道的端面,沿着所述入度路段目标车道的反方向生成箭尾,其中,所述箭尾的宽度为预设宽度;
填充所述第一圆弧和第二圆弧之间的接续部分;
顺次连接所述箭头、第一圆弧、接续部分、第二圆弧和箭尾,生成道路引导图示。
在该实施方式中,当所述道路引导类型为平行转弯,生成道路引导图示时,如图2D所示:
首先根据所述出度路段目标车道尺寸和入度路段目标车道尺寸确定所述出度路段目标车道尺寸的出度中心延长线和入度路段目标车道的入度中心延长线,得到两条中心延长线分别与对应路口边界的交点G1和H1;
然后从两个交点G1和H1出发,分别相向延长第二预设距离K,得到第一出度端点E和第一入度端点F,再从所述出度端点E和第一入度端点F出发,相向延长第三预设距离L4,得到第二出度端点A4和第二入度端点B4;
然后连接所述第二出度端点A4和第二入度端点B4,其中,所述第二出度端点A4和第二入度端点B4之间的连线的长度需大于第三预设距离L4的预设倍数,其中,所述预设倍数可根据实际应用的需要进行设置,比如可设置为2,本公开对于所述预设倍数的具体取值不作特别限定,若所述第二出度端点A4和第二入度端点B4之间的连线的长度小于第三预设距离的预设倍数,则可重新设置所述第三预设距离L4,使得所述第二出度端点A4和第二入度端点B4之间的连线的长度大于第三预设距离L4的预设倍数;
然后在所述第二出度端点A4和第二入度端点B4之间的连线上确定第一切点C4和第二切点D4,其中,所述第一切点C4与所述第二出度端点A4之间的距离以及所述第二切点D4与所述第二入度端点B4之间的距离均与所述第三预设距离L4相等;
然后以所述第一入度端点F和第二切点D4为切点,生成中心线与所述第一入度端点F和第二入度端点B4之间的连线、以及与所述第二入度端点B4和第二切点D4之间的连线均相切的、具有预设宽度的、角度为第一入度端点F、第二入度端点B4和第二切点D4形成的夹角的补角的第一圆弧;
然后以所述第一出度端点E和第一切点C4为切点,生成中心线与所述第一出度端点E和第二出度端点A4之间的连线、以及与所述第二出度端点A4和第一切点C4之间的连线均相切的、具有预设宽度的、角度为第一出度端点E、第二出度端点A4和第一切点C4形成的夹角的补角的第二圆弧;
然后自所述第二圆弧靠近出度路段目标车道的端面,沿着所述出度路段目标车道的方向生成具有同样预设宽度的箭头,自所述第一圆弧靠近入度路段目标车道的端面,沿着所述入度路段目标车道的反方向生成具有同样预设宽度的箭尾;
然后填充所述第一圆弧和第二圆弧之间的接续部分;
最后将所述箭头、第一圆弧、接续部分、第二圆弧和箭尾顺次连接起来,即可生成所述道路引导图示。
当所述道路引导类型为平行掉头转弯且出度路段目标车道中心延长线和入度路段目标车道中心延长线之间的距离小于或等于第四预设距离时,其中,所述第四预设距离可根据实际应用的需要进行设置,比如可设置为6*预设宽度,本公开对于所述第四预设距离的具体取值不作特别限定,所述步骤S104,即根据所述道路引导图示生成参数,生成道路引导图示的步骤,可包括以下步骤:
从所述出度路段目标车道中心延长线和入度路段目标车道中心延长线与路口边界的交点出发,沿着入度路段目标车道方向延长第五预设距离,得到出度端点和入度端点;
以所述出度端点和入度端点作为圆弧中心线端点,生成半圆弧,其中,所述圆弧中心线的半径为出度路段目标车道中心延长线和入度路段目标车道中心延长线距离的一半,所述圆弧的宽度为预设宽度;
自所述圆弧靠近出度路段目标车道的端面,沿着所述出度路段目标车道的方向生成箭头,其中,所述箭头的宽度为预设宽度;
自所述圆弧靠近入度路段目标车道的端面,沿着所述入度路段目标车道的反方向生成箭尾,其中,所述箭尾的宽度为预设宽度;
顺次连接所述箭头、圆弧和箭尾,生成道路引导图示。
在该实施方式中,当所述道路引导类型为平行掉头转弯且出度路段目标车道中心延长线和入度路段目标车道中心延长线之间的距离小于或等于第四预设距离,生成道路引导图示时,如图2E所示:
首先根据所述出度路段目标车道尺寸和入度路段目标车道尺寸确定所述出度路段目标车道尺寸的出度中心延长线和入度路段目标车道的入度中心延长线,得到两条中心延长线分别与对应路口边界的交点G2和H2;
然后从两个交点G2和H2出发,沿着入度路段目标车道方向延长第五预设距离L5,得到出度端点A5和入度端点B5;
然后以所述出度端点A5和入度端点B5作为圆弧中心线的端点,生成一个具有预设宽度的半圆弧,其中,所述半圆弧的中心线的半径为出度路段目标车道中心延长线和入度路段目标车道中心延长线之间的距离的一半;
然后自所述圆弧靠近出度路段目标车道的端面,沿着所述出度路段目标车道的方向生成具有同样预设宽度的箭头,自所述圆弧靠近入度路段目标车道的端面,沿着所述入度路段目标车道的反方向生成具有同样预设宽度的箭尾;
最后将所述箭头、圆弧和箭尾顺次连接起来,即可生成所述道路引导图示。
当所述道路引导类型为平行掉头转弯且出度路段目标车道中心延长线和入度路段目标车道中心延长线之间的距离大于第四预设距离时,所述步骤S104,即根据所述道路引导图示生成参数,生成道路引导图示的步骤,可包括以下步骤:
从所述出度路段目标车道中心延长线和入度路段目标车道中心延长线与路口边界的交点出发,沿着入度路段目标车道方向延长第六预设距离,得到出度端点和入度端点;
生成所述出度路段目标车道与入度路段目标车道之间的连接车道的中心线;
以所述出度端点为靠近出度路段目标车道的圆弧中心线端点,生成第一圆弧,其中,所述第一圆弧的角度为连接车道中心线与出度路段目标车道中心延长线夹角的补角,所述第一圆弧的半径为所述第四预设距离的第二预设比例,所述第一圆弧的宽度为预设宽度;
以所述入度端点为靠近入度路段目标车道的圆弧中心线端点,生成第二圆弧,其中,所述第二圆弧的角度为连接车道中心线与入度路段目标车道中心延长线夹角的补角,所述第二圆弧的半径为所述第四预设距离的第二预设比例,所述第二圆弧的宽度为预设宽度;
自所述第一圆弧靠近出度路段目标车道的端面,沿着所述出度路段目标车道的方向生成箭头,其中,所述箭头的宽度为预设宽度;
自所述第二圆弧靠近入度路段目标车道的端面,沿着所述入度路段目标车道的反方向生成箭尾,其中,所述箭尾的宽度为预设宽度;
沿着所述连接车道填充所述第一圆弧和第二圆弧之间的接续部分;
顺次连接所述箭头、第二圆弧、接续部分、第一圆弧和箭尾,生成道路引导图示。
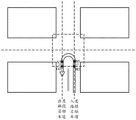
在该实施方式中,当所述道路引导类型为平行掉头转弯且出度路段目标车道中心延长线和入度路段目标车道中心延长线之间的距离大于第四预设距离,生成道路引导图示时,如图2F所示:
首先根据所述出度路段目标车道尺寸和入度路段目标车道尺寸确定所述出度路段目标车道尺寸的出度中心延长线和入度路段目标车道的入度中心延长线,得到两条中心延长线分别与对应路口边界的交点G3和H3;
然后从两个交点G3和H3出发,沿着入度路段目标车道方向延长第六预设距离L6,得到出度端点A6和入度端点B6;
然后生成所述出度路段目标车道与入度路段目标车道之间的连接车道的中心线N;
然后以所述出度端点A6为靠近出度路段目标车道的圆弧的中心线端点,生成具有预设宽度的、角度为连接车道中心线与出度路段目标车道中心延长线夹角的补角的、半径为所述第四预设距离的第二预设比例的第一圆弧,其中,所述第二预设比例可根据实际应用的需要进行确定,比如可设置为1/3,本公开对于所述第二预设比例的具体取值不作特别限定;
然后以所述入度端点B6为靠近入度路段目标车道的圆弧的中心线端点,生成具有预设宽度的、角度为连接车道中心线与入度路段目标车道中心延长线夹角的补角的、半径依然为所述第四预设距离的第二预设比例的第二圆弧;
然后自所述第一圆弧靠近出度路段目标车道的端面,沿着所述出度路段目标车道的方向生成具有同样预设宽度的箭头,自所述第二圆弧靠近入度路段目标车道的端面,沿着所述入度路段目标车道的反方向生成具有同样预设宽度的箭尾;
然后沿着所述连接车道填充所述第一圆弧和第二圆弧之间的接续部分;
最后将所述箭头、第二圆弧、接续部分、第一圆弧和箭尾顺次连接起来,即可生成所述道路引导图示。
在本公开一实施方式中,所述方法进一步包括以下步骤:
使用预设颜色填充所述道路引导图示,并显示在导航引导界面上。
为了使得道路引导图示更为鲜明,引起用户的注意,以为用户提供清晰正确的行驶引导,在该实施方式中,还使用预设颜色填充所述道路引导图示,并将填充了颜色的所述道路引导图示显示在导航引导界面上。其中,所述预设颜色可以为较为鲜明的颜色,比如黄色、橙色、红色等颜色。
下述为本公开装置实施例,可以用于执行本公开方法实施例。
图3示出根据本公开一实施方式的道路引导图示生成装置的结构框图,该装置可以通过软件、硬件或者两者的结合实现成为电子设备的部分或者全部。如图3所示,所述道路引导图示生成装置包括:
第一确定模块301,被配置为确定出度路段目标车道和入度路段目标车道;
第二确定模块302,被配置为根据所述出度路段目标车道与入度路段目标车道之间的位置关系确定道路引导类型;
获取模块303,被配置为根据所述道路引导类型,获取道路引导图示生成参数;
生成模块304,被配置为根据所述道路引导图示生成参数,生成道路引导图示。
上文提及,随着社会的发展和进步,道路上的车辆越来越多,路况也越来越复杂,因此很多用户的出行都依赖于导航路线的指引。在导航指引时,对于车辆在路口的转弯动作通常使用具有转弯形态的箭头来进行引导,现有技术中通常使用传统二阶贝塞尔曲线绘制方法来绘制引导箭头,比如引导箭头的转弯处使用二阶贝塞尔曲线插值算法和高斯平滑来绘制,但二阶贝塞尔曲线插值算法的插入点依赖于路口的出度路段和入度路段的出入度角度,以及出度路段的末端坐标和入度路段的起始坐标,对于同一出入度角度,若坐标点位置不同,则插入的点将会完全不同,这将会导致同一出入度角度对应的引导箭头存在较大的差异。由上可知,传统二阶贝塞尔曲线绘制方法得到的引导箭头的转弯形态不规则、可控性差、难以约束,进而降低了用户的使用体验。
考虑到上述问题,在该实施方式中,提出一种道路引导图示生成装置,该装置通过确定道路引导类型来获取不同的道路引导图示生成参数,再根据道路引导图示生成参数生成相应的绘制道路引导图示。该技术方案对于不同道路引导类型采取不同绘制道路引导图示生成策略,使得道路引导图示的转折弧度可控制且与道路引导类型相对应,避免出现同一出入度角度对应的道路引导图示存在较大的差异的情况,从而提升了用户的使用体验。
在本公开一实施方式中,所述道路引导图示生成装置可实现为可执行道路引导图示生成的终端计算机、计算设备、电子设备、服务器、服务集群等。
上述装置实施例所涉及的技术特征及其对应的解释和说明与上文所描述的方法实施例所涉及的技术特征及其对应的解释和说明相同、相应或相似,对于上述装置实施例所涉及的技术特征及其对应的解释和说明可参考上述方法实施例所涉及的技术特征及其对应的解释和说明,本公开在此不再赘述。
本公开实施例还公开了一种导航服务,其中,基于上述的道路引导图示生成方法,生成被导航对象的道路引导图示,并基于所述道路引导图示为所述被导航对象提供相应场景的导航引导服务。其中,所述相应场景为AR导航或者高架导航或者主辅路导航中的一种或多种的组合。
本公开实施例还公开了一种导航方法,其中,获取至少基于起点、终点及路线规划数据的导航路线,基于所述导航路线进行导航引导,所述路线规划数据包括上述任意一项方法生成的道路引导图示。
本公开实施例还公开了一种电子设备,所述电子设备包括存储器和处理器;其中,
所述存储器用于存储一条或多条计算机指令,其中,所述一条或多条计算机指令被所述处理器执行以实现上述任一方法步骤。
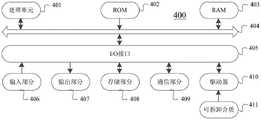
图4是适于用来实现根据本公开一实施方式的道路引导图示生成方法的计算机系统的结构示意图。
如图4所示,计算机系统400包括处理单元401,其可以根据存储在只读存储器(ROM)402中的程序或者从存储部分408加载到随机访问存储器(RAM)403中的程序而执行上述实施方式中的各种处理。在RAM403中,还存储有计算机系统400操作所需的各种程序和数据。处理单元401、ROM402以及RAM403通过总线404彼此相连。输入/输出(I/O)接口405也连接至总线404。
以下部件连接至I/O接口405:包括键盘、鼠标等的输入部分406;包括诸如阴极射线管(CRT)、液晶显示器(LCD)等以及扬声器等的输出部分407;包括硬盘等的存储部分408;以及包括诸如LAN卡、调制解调器等的网络接口卡的通信部分409。通信部分409经由诸如因特网的网络执行通信处理。驱动器410也根据需要连接至I/O接口405。可拆卸介质411,诸如磁盘、光盘、磁光盘、半导体存储器等等,根据需要安装在驱动器410上,以便于从其上读出的计算机程序根据需要被安装入存储部分408。其中,所述处理单元401可实现为CPU、GPU、TPU、FPGA、NPU等处理单元。
特别地,根据本公开的实施方式,上文描述的方法可以被实现为计算机软件程序。例如,本公开的实施方式包括一种计算机程序产品,其包括有形地包含在及其可读介质上的计算机程序,所述计算机程序包含用于执行所述数据检查方法的程序代码。在这样的实施方式中,该计算机程序可以通过通信部分409从网络上被下载和安装,和/或从可拆卸介质411被安装。
附图中的流程图和框图,图示了按照本公开各种实施方式的系统、方法和计算机程序产品的可能实现的体系架构、功能和操作。在这点上,路程图或框图中的每个方框可以代表一个模块、程序段或代码的一部分,所述模块、程序段或代码的一部分包含一个或多个用于实现规定的逻辑功能的可执行指令。也应当注意,在有些作为替换的实现中,方框中所标注的功能也可以以不同于附图中所标注的顺序发生。例如,两个接连地表示的方框实际上可以基本并行地执行,它们有时也可以按相反的顺序执行,这依所涉及的功能而定。也要注意的是,框图和/或流程图中的每个方框、以及框图和/或流程图中的方框的组合,可以用执行规定的功能或操作的专用的基于硬件的系统来实现,或者可以用专用硬件与计算机指令的组合来实现。
描述于本公开实施方式中所涉及到的单元或模块可以通过软件的方式实现,也可以通过硬件的方式来实现。所描述的单元或模块也可以设置在处理器中,这些单元或模块的名称在某种情况下并不构成对该单元或模块本身的限定。
作为另一方面,本公开实施例还提供了一种计算机可读存储介质,该计算机可读存储介质可以是上述实施方式中所述装置中所包含的计算机可读存储介质;也可以是单独存在,未装配入设备中的计算机可读存储介质。计算机可读存储介质存储有一个或者一个以上程序,所述程序被一个或者一个以上的处理器用来执行描述于本公开实施例的方法。
以上描述仅为本公开的较佳实施例以及对所运用技术原理的说明。本领域技术人员应当理解,本公开实施例中所涉及的发明范围,并不限于上述技术特征的特定组合而成的技术方案,同时也应涵盖在不脱离所述发明构思的情况下,由上述技术特征或其等同特征进行任意组合而形成的其它技术方案。例如上述特征与本公开实施例中公开的(但不限于)具有类似功能的技术特征进行互相替换而形成的技术方案。
Claims (13)
1.一种道路引导图示生成方法,包括:
确定出度路段目标车道和入度路段目标车道;
根据所述出度路段目标车道与入度路段目标车道之间的位置关系确定道路引导类型;
根据所述道路引导类型,获取道路引导图示生成参数;
根据所述道路引导图示生成参数,生成道路引导图示。
2.根据权利要求1所述的方法,所述根据所述出度路段目标车道与入度路段目标车道之间的位置关系确定道路引导类型,包括:
当所述出度路段目标车道与入度路段目标车道之间的夹角处于直角范围时,所述道路引导类型为直角转弯;
当所述出度路段目标车道与入度路段目标车道之间的夹角处于平角范围且所述出度路段目标车道与入度路段目标车道行进方向相反时,所述道路引导类型为平行掉头转弯;
当所述出度路段目标车道与入度路段目标车道之间的夹角处于锐角范围时,所述道路引导类型为锐角转弯;
当所述出度路段目标车道与入度路段目标车道之间的夹角处于钝角范围时,所述道路引导类型为钝角转弯;
当所述出度路段目标车道与入度路段目标车道之间的夹角处于平角范围且所述出度路段目标车道与入度路段目标车道行进方向相同时,所述道路引导类型为平行转弯。
3.根据权利要求1或2所述的方法,所述根据所述道路引导类型,获取道路引导图示生成参数,包括:
当所述道路引导类型为直角转弯、锐角转弯、钝角转弯或平行转弯时,所述道路引导图示生成参数包括:出度路段目标车道尺寸、入度路段目标车道尺寸和相应路口边界位置;
当所述道路引导类型为平行掉头转弯时,所述道路引导图示生成参数包括:出度路段目标车道尺寸、入度路段目标车道尺寸、出度路段目标车道与入度路段目标车道之间的距离和相应路口边界位置。
4.根据权利要求3所述的方法,当所述道路引导类型为直角转弯时,所述根据所述道路引导图示生成参数,生成道路引导图示,包括:
根据所述出度路段目标车道尺寸和入度路段目标车道尺寸确定所述出度路段目标车道尺寸的出度中心延长线和入度路段目标车道的入度中心延长线,得到两条中心延长线的交点;
从交点沿所述出度路段目标车道方向和入度路段目标车道反方向分别延长第一距离,得到出度端点和入度端点,其中,所述第一距离为从所述交点沿所述出度路段目标车道方向和入度路段目标车道反方向分别延长至路口边界的较短距离的第一预设比例;
以所述出度端点和入度端点为切点,生成中心线与所述出度中心延长线和入度中心延长线相切的圆弧,其中,所述圆弧的角度为所述出度路段目标车道和入度路段目标车道之间的夹角,所述圆弧的宽度为预设宽度;
自所述圆弧靠近出度路段目标车道的端面,沿着所述出度路段目标车道的方向生成箭头,其中,所述箭头的宽度为预设宽度;
自所述圆弧靠近入度路段目标车道的端面,沿着所述入度路段目标车道的反方向生成箭尾,其中,所述箭尾的宽度为预设宽度;
顺次连接所述箭头、圆弧和箭尾,生成道路引导图示。
5.根据权利要求3所述的方法,当所述道路引导类型为锐角转弯时,所述根据所述道路引导图示生成参数,生成道路引导图示,包括:
根据所述出度路段目标车道尺寸和入度路段目标车道尺寸确定所述出度路段目标车道尺寸的出度中心延长线和入度路段目标车道的入度中心延长线,得到两条中心延长线的交点;
从交点沿所述出度路段目标车道方向和入度路段目标车道反方向分别延长第二距离,得到出度端点和入度端点,其中,所述第二距离为从所述交点沿所述出度路段目标车道方向和入度路段目标车道反方向分别延长至路口边界的较短距离减去第一预设距离;
以所述出度端点和入度端点为切点,生成中心线与所述出度中心延长线和入度中心延长线相切的圆弧,其中,所述圆弧的角度为出度端点、交点和入度端点形成的夹角的补角,所述圆弧的宽度为预设宽度;
自所述圆弧靠近出度路段目标车道的端面,沿着所述出度路段目标车道的方向生成箭头,其中,所述箭头的宽度为预设宽度;
自所述圆弧靠近入度路段目标车道的端面,沿着所述入度路段目标车道的反方向生成箭尾,其中,所述箭尾的宽度为预设宽度;
顺次连接所述箭头、圆弧和箭尾,生成道路引导图示。
6.根据权利要求3所述的方法,当所述道路引导类型为钝角转弯时,所述根据所述道路引导图示生成参数,生成道路引导图示,包括:
根据所述出度路段目标车道尺寸和入度路段目标车道尺寸确定所述出度路段目标车道尺寸的出度中心延长线和入度路段目标车道的入度中心延长线,得到两条中心延长线的交点;
从交点沿所述出度路段目标车道方向和入度路段目标车道反方向分别延长第三距离,得到出度端点和入度端点,其中,所述第三距离为从所述交点沿所述出度路段目标车道方向和入度路段目标车道反方向分别延长至路口边界的较短距离的第二预设比例;
以所述出度端点和入度端点为切点,生成中心线与所述出度中心延长线和入度中心延长线相切的圆弧,其中,所述圆弧的角度为出度端点、交点和入度端点形成的夹角的补角,所述圆弧的宽度为预设宽度;
自所述圆弧靠近出度路段目标车道的端面,沿着所述出度路段目标车道的方向生成箭头,其中,所述箭头的宽度为预设宽度;
自所述圆弧靠近入度路段目标车道的端面,沿着所述入度路段目标车道的反方向生成箭尾,其中,所述箭尾的宽度为预设宽度;
顺次连接所述箭头、圆弧和箭尾,生成道路引导图示。
7.根据权利要求3所述的方法,当所述道路引导类型为平行转弯时,所述根据所述道路引导图示生成参数,生成道路引导图示,包括:
根据所述出度路段目标车道尺寸和入度路段目标车道尺寸确定所述出度路段目标车道尺寸的出度中心延长线和入度路段目标车道的入度中心延长线,得到两条中心延长线分别与对应路口边界的交点;
从两个交点分别相向延长第二预设距离,得到第一出度端点和第一入度端点,再延长第三预设距离,得到第二出度端点和第二入度端点;
连接所述第二出度端点和第二入度端点,其中,所述第二出度端点和第二入度端点之间的连线长度大于第三预设距离的预设倍数;
在所述第二出度端点和第二入度端点的连线上确定第一切点和第二切点,其中,所述第一切点与所述第二出度端点之间的距离以及所述第二切点与所述第二入度端点之间的距离均为所述第三预设距离;
以所述第一入度端点和第二切点为切点,生成中心线与所述第一入度端点和第二入度端点之间的连线、所述第二入度端点和第二切点之间的连线相切的第一圆弧,其中,所述第一圆弧的角度为第一入度端点、第二入度端点和第二切点形成的夹角的补角,所述第一圆弧的宽度为预设宽度;
以所述第一出度端点和第一切点为切点,生成中心线与所述第一出度端点和第二出度端点之间的连线、所述第二入度端点和第一切点之间的连线相切的第二圆弧,其中,所述第二圆弧的角度为第一出度端点、第二出度端点和第一切点形成的夹角的补角,所述第二圆弧的宽度为预设宽度;
自所述第二圆弧靠近出度路段目标车道的端面,沿着所述出度路段目标车道的方向生成箭头,其中,所述箭头的宽度为预设宽度;
自所述第一圆弧靠近入度路段目标车道的端面,沿着所述入度路段目标车道的反方向生成箭尾,其中,所述箭尾的宽度为预设宽度;
填充所述第一圆弧和第二圆弧之间的接续部分;
顺次连接所述箭头、第一圆弧、接续部分、第二圆弧和箭尾,生成道路引导图示。
8.根据权利要求3所述的方法,当所述道路引导类型为平行掉头转弯且出度路段目标车道中心延长线和入度路段目标车道中心延长线之间的距离小于或等于第四预设距离时,所述根据所述道路引导图示生成参数,生成道路引导图示,包括:
从所述出度路段目标车道中心延长线和入度路段目标车道中心延长线与路口边界的交点出发,沿着入度路段目标车道方向延长第五预设距离,得到出度端点和入度端点;
以所述出度端点和入度端点作为圆弧中心线端点,生成半圆弧,其中,所述圆弧中心线的半径为出度路段目标车道中心延长线和入度路段目标车道中心延长线距离的一半,所述圆弧的宽度为预设宽度;
自所述圆弧靠近出度路段目标车道的端面,沿着所述出度路段目标车道的方向生成箭头,其中,所述箭头的宽度为预设宽度;
自所述圆弧靠近入度路段目标车道的端面,沿着所述入度路段目标车道的反方向生成箭尾,其中,所述箭尾的宽度为预设宽度;
顺次连接所述箭头、圆弧和箭尾,生成道路引导图示。
9.根据权利要求3所述的方法,当所述道路引导类型为平行掉头转弯且出度路段目标车道中心延长线和入度路段目标车道中心延长线之间的距离大于第四预设距离时,所述根据所述道路引导图示生成参数,生成道路引导图示,包括:
从所述出度路段目标车道中心延长线和入度路段目标车道中心延长线与路口边界的交点出发,沿着入度路段目标车道方向延长第六预设距离,得到出度端点和入度端点;
生成所述出度路段目标车道与入度路段目标车道之间的连接车道的中心线;
以所述出度端点为靠近出度路段目标车道的圆弧中心线端点,生成第一圆弧,其中,所述第一圆弧的角度为连接车道中心线与出度路段目标车道中心延长线夹角的补角,所述第一圆弧的半径为所述第四预设距离的第二预设比例,所述第一圆弧的宽度为预设宽度;
以所述入度端点为靠近入度路段目标车道的圆弧中心线端点,生成第二圆弧,其中,所述第二圆弧的角度为连接车道中心线与入度路段目标车道中心延长线夹角的补角,所述第二圆弧的半径为所述第四预设距离的第二预设比例,所述第二圆弧的宽度为预设宽度;
自所述第一圆弧靠近出度路段目标车道的端面,沿着所述出度路段目标车道的方向生成箭头,其中,所述箭头的宽度为预设宽度;
自所述第二圆弧靠近入度路段目标车道的端面,沿着所述入度路段目标车道的反方向生成箭尾,其中,所述箭尾的宽度为预设宽度;
沿着所述连接车道填充所述第一圆弧和第二圆弧之间的接续部分;
顺次连接所述箭头、第二圆弧、接续部分、第一圆弧和箭尾,生成道路引导图示。
10.根据权利要求1、2、4-9中任一项所述的方法,进一步包括:
使用预设颜色填充所述道路引导图示,并显示在导航引导界面上。
11.一种道路引导图示生成装置,包括:
第一确定模块,被配置为确定出度路段目标车道和入度路段目标车道;
第二确定模块,被配置为根据所述出度路段目标车道与入度路段目标车道之间的位置关系确定道路引导类型;
获取模块,被配置为根据所述道路引导类型,获取道路引导图示生成参数;
生成模块,被配置为根据所述道路引导图示生成参数,生成道路引导图示。
12.一种计算机可读存储介质,其上存储有计算机指令,其中,该计算机指令被处理器执行时实现权利要求1-10任一项所述的方法步骤。
13.一种导航方法,其中,获取至少基于起点、终点及路线规划数据的导航路线,基于所述导航路线进行导航引导,所述路线规划数据包括权利要求1-10任一项所述的方法生成的道路引导图示。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202210118420.4A CN114812597A (zh) | 2022-02-08 | 2022-02-08 | 道路引导图示生成方法、装置、导航方法及可读存储介质 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202210118420.4A CN114812597A (zh) | 2022-02-08 | 2022-02-08 | 道路引导图示生成方法、装置、导航方法及可读存储介质 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN114812597A true CN114812597A (zh) | 2022-07-29 |
Family
ID=82527398
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202210118420.4A Pending CN114812597A (zh) | 2022-02-08 | 2022-02-08 | 道路引导图示生成方法、装置、导航方法及可读存储介质 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN114812597A (zh) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN115717899A (zh) * | 2022-11-25 | 2023-02-28 | 北京斯年智驾科技有限公司 | 一种弯道路径选择方法和装置 |
| CN118816907A (zh) * | 2024-04-29 | 2024-10-22 | 中移(上海)信息通信科技有限公司 | 车道线处理方法、装置、电子设备、计算机可读存储介质及计算机程序产品 |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB374930A (en) * | 1931-03-16 | 1932-06-16 | Rheinische Metallw & Maschf | An improved aiming device, more particularly for anti-aircraft guns |
| JPH09269997A (ja) * | 1996-03-29 | 1997-10-14 | Mitsubishi Electric Corp | 道路マップ作成装置及び道路マップ表示装置及び空港面マップ作成装置及び空港面マップ表示装置及び道路マップ作成方法及び道路マップ表示方法及び空港面マップ作成方法及び空港面マップ表示方法 |
| US6226573B1 (en) * | 1995-08-01 | 2001-05-01 | Komatsu Ltd. | Course generator of moving body |
| US20140249748A1 (en) * | 2013-03-04 | 2014-09-04 | Harman Becker Automotive Systems Gmbh | Route guidance at intersections |
| CN205340083U (zh) * | 2016-01-18 | 2016-06-29 | 李智 | 台球瞄准辅助器材 |
| CN113899380A (zh) * | 2021-09-29 | 2022-01-07 | 北京百度网讯科技有限公司 | 路口转向提醒方法、装置、电子设备及存储介质 |
| CN113899384A (zh) * | 2021-12-09 | 2022-01-07 | 腾讯科技(深圳)有限公司 | 车道级道路的路口面显示方法、装置、设备、介质及程序 |
-
2022
- 2022-02-08 CN CN202210118420.4A patent/CN114812597A/zh active Pending
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB374930A (en) * | 1931-03-16 | 1932-06-16 | Rheinische Metallw & Maschf | An improved aiming device, more particularly for anti-aircraft guns |
| US6226573B1 (en) * | 1995-08-01 | 2001-05-01 | Komatsu Ltd. | Course generator of moving body |
| JPH09269997A (ja) * | 1996-03-29 | 1997-10-14 | Mitsubishi Electric Corp | 道路マップ作成装置及び道路マップ表示装置及び空港面マップ作成装置及び空港面マップ表示装置及び道路マップ作成方法及び道路マップ表示方法及び空港面マップ作成方法及び空港面マップ表示方法 |
| US20140249748A1 (en) * | 2013-03-04 | 2014-09-04 | Harman Becker Automotive Systems Gmbh | Route guidance at intersections |
| CN205340083U (zh) * | 2016-01-18 | 2016-06-29 | 李智 | 台球瞄准辅助器材 |
| CN113899380A (zh) * | 2021-09-29 | 2022-01-07 | 北京百度网讯科技有限公司 | 路口转向提醒方法、装置、电子设备及存储介质 |
| CN113899384A (zh) * | 2021-12-09 | 2022-01-07 | 腾讯科技(深圳)有限公司 | 车道级道路的路口面显示方法、装置、设备、介质及程序 |
Non-Patent Citations (2)
| Title |
|---|
| 交通运输部,郭腾峰: "公路路线设计规范", 28 September 2017 * |
| 住房城乡建设部: "道路交通标志和标线", 27 January 2018 * |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN115717899A (zh) * | 2022-11-25 | 2023-02-28 | 北京斯年智驾科技有限公司 | 一种弯道路径选择方法和装置 |
| CN115717899B (zh) * | 2022-11-25 | 2024-04-30 | 北京斯年智驾科技有限公司 | 一种弯道路径选择方法和装置 |
| CN118816907A (zh) * | 2024-04-29 | 2024-10-22 | 中移(上海)信息通信科技有限公司 | 车道线处理方法、装置、电子设备、计算机可读存储介质及计算机程序产品 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102559269B1 (ko) | 실경 내비게이션 아이콘 표시 방법, 장치, 기기 및 매체 | |
| US9830064B2 (en) | Rendering map images using modifications of non-raster map data | |
| US8937627B1 (en) | Seamless vector map tiles across multiple zoom levels | |
| CN113223113B (zh) | 车道线处理方法、装置、电子设备和云控平台 | |
| CN114812597A (zh) | 道路引导图示生成方法、装置、导航方法及可读存储介质 | |
| CN113538622B (zh) | 一种路口绘制方法、装置、设备及存储介质 | |
| CN112051864B (zh) | 用于移动目标轨迹跟踪的方法及装置、设备和可读介质 | |
| JP7425169B2 (ja) | 画像処理方法、装置、電子機器、記憶媒体及びコンピュータプログラム | |
| CN109544658B (zh) | 地图的渲染方法和装置、存储介质、电子装置 | |
| EP4040113A2 (en) | Method and apparatus for road guidance, and electronic device | |
| CN107941226B (zh) | 用于生成车辆的方向引导线的方法和装置 | |
| CN114838737B (zh) | 一种行驶路径的确定方法、装置、电子设备及存储介质 | |
| EP4261644B1 (en) | Unmanned vehicle path optimization method and related device | |
| CN113205570B (zh) | 基于电子地图的电子斑马线的生成方法及装置 | |
| CN114445598A (zh) | 一种显示数据处理方法、系统、存储介质及电子设备 | |
| CN114882141B (zh) | 斑马线绘制方法、装置、电子设备及计算机程序产品 | |
| AU2009202878B2 (en) | A line stroking method and system | |
| CN113804208B (zh) | 无人车路径优化方法及相关设备 | |
| CN114754762A (zh) | 地图的处理方法、装置 | |
| CN112697163A (zh) | 一种诱导转向的确定方法、装置、电子设备及存储介质 | |
| CN113581205B (zh) | 一种调整车辆姿态的方法和装置 | |
| CN114723864B (zh) | 带宽度的弧线渲染方法及计算机程序产品 | |
| CN115824239A (zh) | 推荐车道确定方法、装置、电子设备及计算机程序产品 | |
| JP2003281555A (ja) | 図形描画装置 | |
| CN110389349B (zh) | 定位方法和装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination |