CN114812597A - Road guide graphic generation method and device, navigation method and readable storage medium - Google Patents
Road guide graphic generation method and device, navigation method and readable storage medium Download PDFInfo
- Publication number
- CN114812597A CN114812597A CN202210118420.4A CN202210118420A CN114812597A CN 114812597 A CN114812597 A CN 114812597A CN 202210118420 A CN202210118420 A CN 202210118420A CN 114812597 A CN114812597 A CN 114812597A
- Authority
- CN
- China
- Prior art keywords
- degree
- target lane
- road
- road section
- arc
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images






Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/34—Route searching; Route guidance
- G01C21/36—Input/output arrangements for on-board computers
- G01C21/3626—Details of the output of route guidance instructions
- G01C21/3632—Guidance using simplified or iconic instructions, e.g. using arrows
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Automation & Control Theory (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Traffic Control Systems (AREA)
Abstract
Description
技术领域technical field
本公开实施例涉及渲染技术领域,具体涉及一种道路引导图示生成方法、装置、导航方法及可读存储介质。Embodiments of the present disclosure relate to the field of rendering technologies, and in particular, to a method, device, navigation method, and readable storage medium for generating a road guidance illustration.
背景技术Background technique
随着社会的发展和进步,道路上的车辆越来越多,路况也越来越复杂,因此很多用户的出行都依赖于导航路线的指引。在导航指引时,对于车辆在路口的转弯动作通常使用具有转弯形态的箭头来进行引导,现有技术中通常使用传统二阶贝塞尔曲线绘制方法来绘制引导箭头,比如引导箭头的转弯处使用二阶贝塞尔曲线插值算法和高斯平滑来绘制,但二阶贝塞尔曲线插值算法的插入点依赖于路口的出度路段和入度路段的出入度角度,以及出度路段的末端坐标和入度路段的起始坐标,对于同一出入度角度,若坐标点位置不同,则插入的点将会完全不同,这将会导致同一出入度角度对应的引导箭头存在较大的差异。由上可知,传统二阶贝塞尔曲线绘制方法得到的引导箭头的转弯形态不规则、可控性差、难以约束,进而降低了用户的使用体验。With the development and progress of society, there are more and more vehicles on the road, and the road conditions are becoming more and more complicated. Therefore, many users rely on the guidance of navigation routes for their travel. During navigation guidance, arrows with a turning shape are usually used to guide the turning actions of vehicles at intersections. In the prior art, the traditional second-order Bezier curve drawing method is usually used to draw the guiding arrows, such as the turning of the guiding arrows. The second-order Bezier curve interpolation algorithm and Gaussian smoothing are used to draw, but the insertion point of the second-order Bezier curve interpolation algorithm depends on the out-degree segment of the intersection and the in-degree angle of the in-degree segment, as well as the end coordinates of the out-degree segment and For the starting coordinates of the in-degree road section, for the same in-degree angle, if the coordinate point positions are different, the inserted points will be completely different, which will lead to a large difference in the guide arrows corresponding to the same in-degree angle. It can be seen from the above that the turning shape of the guide arrow obtained by the traditional second-order Bezier curve drawing method is irregular, the controllability is poor, and it is difficult to constrain, thereby reducing the user experience.
发明内容SUMMARY OF THE INVENTION
本公开实施例提供一种道路引导图示生成方法、装置、导航方法及可读存储介质。Embodiments of the present disclosure provide a method, device, navigation method, and readable storage medium for generating a road guidance illustration.
第一方面,本公开实施例中提供了一种道路引导图示生成方法。In a first aspect, an embodiment of the present disclosure provides a method for generating a road guidance diagram.
具体的,所述道路引导图示生成方法,包括:Specifically, the method for generating a road guidance icon includes:
确定出度路段目标车道和入度路段目标车道;Determine the target lane of the outbound section and the target lane of the inbound section;
根据所述出度路段目标车道与入度路段目标车道之间的位置关系确定道路引导类型;Determine the road guidance type according to the positional relationship between the target lane of the outbound road section and the target lane of the inbound road section;
根据所述道路引导类型,获取道路引导图示生成参数;According to the road guidance type, obtain a road guidance icon generation parameter;
根据所述道路引导图示生成参数,生成道路引导图示。A road guidance picture is generated according to the road guidance picture generation parameter.
第二方面,本公开实施例中提供了一种道路引导图示生成装置。In a second aspect, an embodiment of the present disclosure provides an apparatus for generating a road guidance diagram.
具体的,所述道路引导图示生成装置,包括:Specifically, the device for generating road guidance diagrams includes:
第一确定模块,被配置为确定出度路段目标车道和入度路段目标车道;a first determining module, configured to determine the target lane of the out-degree road segment and the target lane of the in-degree road segment;
第二确定模块,被配置为根据所述出度路段目标车道与入度路段目标车道之间的位置关系确定道路引导类型;a second determining module configured to determine the road guidance type according to the positional relationship between the target lane of the out-degree road segment and the target lane of the in-degree road segment;
获取模块,被配置为根据所述道路引导类型,获取道路引导图示生成参数;an obtaining module, configured to obtain a road guidance icon generation parameter according to the road guidance type;
生成模块,被配置为根据所述道路引导图示生成参数,生成道路引导图示。A generation module is configured to generate a road guidance diagram according to the road guidance diagram generation parameters.
第三方面,本公开实施例提供了一种电子设备,包括存储器和处理器,所述存储器用于存储一条或多条支持道路引导图示生成装置执行上述道路引导图示生成方法的计算机指令,所述处理器被配置为用于执行所述存储器中存储的计算机指令。所述道路引导图示生成装置还可以包括通信接口,用于道路引导图示生成装置与其他设备或通信网络通信。In a third aspect, an embodiment of the present disclosure provides an electronic device, including a memory and a processor, where the memory is configured to store one or more computer instructions for supporting a road guidance graphic generating apparatus to execute the above-mentioned road guidance graphic generating method, The processor is configured to execute computer instructions stored in the memory. The road guidance illustration generating apparatus may further include a communication interface for the road guidance illustration generating apparatus to communicate with other devices or a communication network.
第四方面,本公开实施例提供了一种计算机可读存储介质,用于存储道路引导图示生成装置所用的计算机指令,其包含用于执行上述道路引导图示生成方法为道路引导图示生成装置所涉及的计算机指令。In a fourth aspect, an embodiment of the present disclosure provides a computer-readable storage medium for storing computer instructions used by a road guidance icon generation device, which includes a method for generating a road guidance icon for executing the above road guidance icon generation method to generate a road guidance icon. The computer instructions involved in the device.
第五方面,本公开实施例提供了一种导航方法,其中,获取至少基于起点、终点及路线规划数据的导航路线,基于所述导航路线进行导航引导,所述路线规划数据是基于上述任意一项方法实现的。In a fifth aspect, an embodiment of the present disclosure provides a navigation method, wherein a navigation route based on at least a starting point, an end point, and route planning data is obtained, and navigation guidance is performed based on the navigation route, and the route planning data is based on any one of the above-mentioned route planning data. Item method is implemented.
本公开实施例提供的技术方案可包括以下有益效果:The technical solutions provided by the embodiments of the present disclosure may include the following beneficial effects:
上述技术方案通过确定道路引导类型来获取不同的道路引导图示生成参数,再根据道路引导图示生成参数生成相应的绘制道路引导图示。该技术方案对于不同道路引导类型采取不同绘制道路引导图示生成策略,使得道路引导图示的转折弧度可控制且与道路引导类型相对应,避免出现同一出入度角度对应的道路引导图示存在较大的差异的情况,从而提升了用户的使用体验。The above technical solution obtains different road guidance icon generation parameters by determining the road guidance type, and then generates corresponding drawn road guidance icons according to the road guidance icon generation parameters. The technical solution adopts different drawing road guidance icon generation strategies for different road guidance types, so that the turning arc of the road guidance icon can be controlled and corresponds to the road guidance type, avoiding the occurrence of road guidance icons corresponding to the same entry and exit angle. In the case of large differences, the user experience is improved.
应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本公开实施例。It is to be understood that the foregoing general description and the following detailed description are exemplary and explanatory only and are not limiting of the disclosed embodiments.
附图说明Description of drawings
结合附图,通过以下非限制性实施方式的详细描述,本公开实施例的其它特征、目的和优点将变得更加明显。在附图中:Other features, objects, and advantages of embodiments of the present disclosure will become more apparent from the following detailed description of non-limiting embodiments, taken in conjunction with the accompanying drawings. In the attached image:
图1示出根据本公开一实施方式的道路引导图示生成方法的流程图;FIG. 1 shows a flowchart of a method for generating a road guidance illustration according to an embodiment of the present disclosure;
图2A-图2F示出根据本公开一实施方式的道路引导图示生成示意图;2A-2F illustrate schematic diagrams of generating road guidance diagrams according to an embodiment of the present disclosure;
图3示出根据本公开一实施方式的道路引导图示生成装置的结构框图;FIG. 3 shows a structural block diagram of an apparatus for generating a road guidance diagram according to an embodiment of the present disclosure;
图4是适于用来实现根据本公开一实施方式的道路引导图示生成方法的计算机系统的结构示意图。FIG. 4 is a schematic structural diagram of a computer system suitable for implementing a method for generating a road guidance illustration according to an embodiment of the present disclosure.
具体实施方式Detailed ways
下文中,将参考附图详细描述本公开实施例的示例性实施方式,以使本领域技术人员可容易地实现它们。此外,为了清楚起见,在附图中省略了与描述示例性实施方式无关的部分。Hereinafter, exemplary embodiments of the embodiments of the present disclosure will be described in detail with reference to the accompanying drawings so that those skilled in the art can easily implement them. Also, for the sake of clarity, parts unrelated to describing the exemplary embodiments are omitted from the drawings.
在本公开实施例中,应理解,诸如“包括”或“具有”等的术语旨在指示本说明书中所公开的特征、数字、步骤、行为、部件、部分或其组合的存在,并且不欲排除一个或多个其他特征、数字、步骤、行为、部件、部分或其组合存在或被添加的可能性。In embodiments of the present disclosure, it should be understood that terms such as "comprising" or "having" are intended to indicate the presence of features, numbers, steps, acts, components, parts, or combinations thereof disclosed in this specification, and are not intended to be The presence or addition of one or more other features, numbers, steps, acts, components, parts, or combinations thereof is excluded.
另外还需要说明的是,在不冲突的情况下,本公开中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本公开实施例。In addition, it should be noted that the embodiments of the present disclosure and the features of the embodiments may be combined with each other under the condition of no conflict. The embodiments of the present disclosure will be described in detail below with reference to the accompanying drawings and in conjunction with the embodiments.
本公开实施例提供的技术方案通过确定道路引导类型来获取不同的道路引导图示生成参数,再根据道路引导图示生成参数生成相应的绘制道路引导图示。该技术方案对于不同道路引导类型采取不同绘制道路引导图示生成策略,使得道路引导图示的转折弧度可控制且与道路引导类型相对应,避免出现同一出入度角度对应的道路引导图示存在较大的差异的情况,从而提升了用户的使用体验。The technical solutions provided by the embodiments of the present disclosure obtain different road guidance icon generation parameters by determining the road guidance type, and then generate corresponding drawn road guidance icons according to the road guidance icon generation parameters. The technical solution adopts different drawing road guidance icon generation strategies for different road guidance types, so that the turning arc of the road guidance icon can be controlled and corresponds to the road guidance type, avoiding the occurrence of road guidance icons corresponding to the same entry and exit angle. In the case of large differences, the user experience is improved.
图1示出根据本公开一实施方式的道路引导图示生成方法的流程图,如图1所示,所述道路引导图示生成方法包括以下步骤S101-S104:1 shows a flowchart of a method for generating a road guidance icon according to an embodiment of the present disclosure. As shown in FIG. 1 , the method for generating a road guidance icon includes the following steps S101-S104:
在步骤S101中,确定出度路段目标车道和入度路段目标车道;In step S101, determine the target lane of the out-degree road segment and the target lane of the in-degree road segment;
在步骤S102中,根据所述出度路段目标车道与入度路段目标车道之间的位置关系确定道路引导类型;In step S102, the road guidance type is determined according to the positional relationship between the target lane of the out-degree road segment and the target lane of the in-degree road segment;
在步骤S103中,根据所述道路引导类型,获取道路引导图示生成参数;In step S103, according to the road guidance type, obtain road guidance icon generation parameters;
在步骤S104中,根据所述道路引导图示生成参数,生成道路引导图示。In step S104, a road guidance picture is generated according to the road guidance picture generation parameter.
上文提及,随着社会的发展和进步,道路上的车辆越来越多,路况也越来越复杂,因此很多用户的出行都依赖于导航路线的指引。在导航指引时,对于车辆在路口的转弯动作通常使用具有转弯形态的箭头来进行引导,现有技术中通常使用传统二阶贝塞尔曲线绘制方法来绘制引导箭头,比如引导箭头的转弯处使用二阶贝塞尔曲线插值算法和高斯平滑来绘制,但二阶贝塞尔曲线插值算法的插入点依赖于路口的出度路段和入度路段的出入度角度,以及出度路段的末端坐标和入度路段的起始坐标,对于同一出入度角度,若坐标点位置不同,则插入的点将会完全不同,这将会导致同一出入度角度对应的引导箭头存在较大的差异。由上可知,传统二阶贝塞尔曲线绘制方法得到的引导箭头的转弯形态不规则、可控性差、难以约束,进而降低了用户的使用体验。As mentioned above, with the development and progress of society, there are more and more vehicles on the road, and the road conditions are becoming more and more complicated. Therefore, many users rely on the guidance of navigation routes for their travel. During navigation guidance, arrows with a turning shape are usually used to guide the turning actions of vehicles at intersections. In the prior art, the traditional second-order Bezier curve drawing method is usually used to draw the guiding arrows, such as the turning of the guiding arrows. The second-order Bezier curve interpolation algorithm and Gaussian smoothing are used to draw, but the insertion point of the second-order Bezier curve interpolation algorithm depends on the out-degree segment of the intersection and the in-degree angle of the in-degree segment, as well as the end coordinates of the out-degree segment and For the starting coordinates of the in-degree road section, for the same in-degree angle, if the coordinate point positions are different, the inserted points will be completely different, which will lead to a large difference in the guide arrows corresponding to the same in-degree angle. It can be seen from the above that the turning shape of the guide arrow obtained by the traditional second-order Bezier curve drawing method is irregular, the controllability is poor, and it is difficult to constrain, thereby reducing the user experience.
考虑到上述问题,在该实施方式中,提出一种道路引导图示生成方法,该方法通过确定道路引导类型来获取不同的道路引导图示生成参数,再根据道路引导图示生成参数生成相应的绘制道路引导图示。该技术方案对于不同道路引导类型采取不同绘制道路引导图示生成策略,使得道路引导图示的转折弧度可控制且与道路引导类型相对应,避免出现同一出入度角度对应的道路引导图示存在较大的差异的情况,从而提升了用户的使用体验。Considering the above problems, in this embodiment, a method for generating road guidance icons is proposed. The method obtains different road guidance icon generation parameters by determining the road guidance type, and then generates corresponding road guidance icons according to the road guidance icon generation parameters. Draw road guidance icons. The technical solution adopts different drawing road guidance icon generation strategies for different road guidance types, so that the turning arc of the road guidance icon can be controlled and corresponds to the road guidance type, avoiding the occurrence of road guidance icons corresponding to the same entry and exit angle. In the case of large differences, the user experience is improved.
在本公开一实施方式中,所述道路引导图示生成方法可适用于可执行道路引导图示生成的计算机、计算设备、电子设备、服务器、服务集群等。In an embodiment of the present disclosure, the method for generating a road guidance illustration can be applied to a computer, computing device, electronic device, server, service cluster, etc. that can execute the generation of a road guidance illustration.
在本公开一实施方式中,所述道路引导图示指的是用于进行道路引导的图示,比如转弯箭头等等。为了便于解释和说明,下文中将以所述道路引导图示为转弯箭头为例对于本公开进行详细的描述。In an embodiment of the present disclosure, the road guidance icons refer to icons used for road guidance, such as turning arrows and the like. For the convenience of explanation and description, the present disclosure will be described in detail below by taking the road guidance diagram as a turning arrow as an example.
在本公开一实施方式中,所述入度路段目标车道指的是车辆在进入某一路口前所在的路段中的车道,比如拐弯前所在的路段中的车道,也即在拐弯时将要驶出的车道,所述出度路段目标车道指的是车辆在驶出某一路口后所在的路段中的车道,比如拐弯后将要驶入的车道,所述出度路段目标车道和入度路段目标车道可根据车辆当前的行驶数据来确定。所述入度路段目标车道和出度路段目标车道之间有可能存在多种位置关系,比如垂直、平行、相错等等。In an embodiment of the present disclosure, the target lane of the in-degree road segment refers to the lane in the road segment where the vehicle is located before entering a certain intersection, such as the lane in the road segment where the vehicle is located before turning, that is, it is about to drive out when turning The target lane of the out-degree section refers to the lane in the road section where the vehicle is located after exiting a certain intersection, such as the lane to be entered after turning, the target lane of the out-degree section and the target lane of the in-degree section It can be determined according to the current driving data of the vehicle. There may be various positional relationships between the target lane of the in-degree road section and the target lane of the out-degree road section, such as vertical, parallel, staggered, and so on.
在本公开一实施方式中,所述道路引导类型指的是道路引导的类型,其与所述出度路段目标车道与入度路段目标车道之间的位置关系相关,其中,所述道路引导类型可包括以下类型中的一种或多种:直角转弯、平行掉头转弯、锐角转弯、钝角转弯和平行转弯。In an embodiment of the present disclosure, the road guidance type refers to the type of road guidance, which is related to the positional relationship between the target lane of the out-degree link and the target lane of the in-degree link, wherein the road guidance type Can include one or more of the following types: quarter turns, parallel turns, sharp turns, obtuse turns, and parallel turns.
在本公开一实施方式中,所述道路引导图示生成参数指的是用于生成道路引导图示所需要的参数,比如出度路段目标车道尺寸、入度路段目标车道尺寸、出度路段目标车道与入度路段目标车道之间的距离、路口边界位置等等。其中,所述出度路段目标车道尺寸指的是所述出度路段目标车道的宽度、长度等尺寸;所述入度路段目标车道尺寸指的是所述入度路段目标车道的宽度、长度等尺寸;所述出度路段目标车道与入度路段目标车道之间的距离指的是所述出度路段目标车道的中心线与入度路段目标车道的中心线之间的垂直距离;所述路口边界位置指的是与路口相通的多个车道停止线所形成的边界。In an embodiment of the present disclosure, the road guidance icon generation parameters refer to parameters required for generating a road guidance icon, such as the target lane size of the out-degree road segment, the target lane size of the in-degree road segment, and the target of the out-degree road segment. The distance between the lane and the target lane of the in-degree segment, the location of the intersection boundary, etc. The target lane size of the out-degree road section refers to the width, length, etc. of the target lane of the out-degree road section; the target lane size of the in-degree road section refers to the width, length, etc. of the target lane of the in-degree road section. size; the distance between the target lane of the out-degree road segment and the target lane of the in-degree road segment refers to the vertical distance between the center line of the target lane of the out-degree road segment and the center line of the target lane of the in-degree road segment; the intersection The boundary position refers to the boundary formed by multiple lane stop lines that communicate with the intersection.
在上述实施方式中,首先根据车辆当前的行驶数据确定车辆的出度路段目标车道和入度路段目标车道,然后根据所述出度路段目标车道与入度路段目标车道之间的位置关系确定道路引导类型,然后根据所述道路引导类型获取相应的道路引导图示生成参数,最后即可根据所述道路引导图示生成参数生成相应的道路引导图示。In the above embodiment, firstly, the vehicle's out-degree target lane and in-degree target lane are determined according to the current driving data of the vehicle, and then the road is determined according to the positional relationship between the out-degree target lane and the in-degree target lane. Then, the corresponding road guidance icon generation parameters can be obtained according to the road guidance type, and finally the corresponding road guidance icon can be generated according to the road guidance icon generation parameters.
在本公开一实施方式中,所述步骤S102,即根据所述出度路段目标车道与入度路段目标车道之间的位置关系确定道路引导类型的步骤,可包括以下步骤:In an embodiment of the present disclosure, the step S102, that is, the step of determining the road guidance type according to the positional relationship between the target lane of the out-degree road segment and the target lane of the in-degree road segment, may include the following steps:
当所述出度路段目标车道与入度路段目标车道之间的夹角处于直角范围时,所述道路引导类型为直角转弯;When the included angle between the target lane of the out-degree road section and the target lane of the in-degree road section is within a right-angle range, the road guidance type is a right-angle turn;
当所述出度路段目标车道与入度路段目标车道之间的夹角处于平角范围且所述出度路段目标车道与入度路段目标车道行进方向相反时,所述道路引导类型为平行掉头转弯;When the included angle between the target lane of the out-degree road segment and the target lane of the in-degree road segment is within a flat angle range and the travel directions of the out-degree road segment target lane and the in-degree road segment target lane are opposite to each other, the road guidance type is a parallel U-turn ;
当所述出度路段目标车道与入度路段目标车道之间的夹角处于锐角范围时,所述道路引导类型为锐角转弯;When the included angle between the target lane of the out-degree road section and the target lane of the in-degree road section is in an acute angle range, the road guidance type is an acute angle turn;
当所述出度路段目标车道与入度路段目标车道之间的夹角处于钝角范围时,所述道路引导类型为钝角转弯;When the included angle between the target lane of the out-degree road section and the target lane of the in-degree road section is in an obtuse angle range, the road guidance type is an obtuse angle turn;
当所述出度路段目标车道与入度路段目标车道之间的夹角处于平角范围且所述出度路段目标车道与入度路段目标车道行进方向相同时,所述道路引导类型为平行转弯。When the included angle between the target lane of the out-degree road segment and the target lane of the in-degree road segment is within a flat angle range and the travel directions of the out-degree road segment target lane and the in-degree road segment target lane are the same, the road guidance type is parallel turning.
其中,所述直角范围指的是直角增加或者减小预设角度而形成的角度范围,若所述出度路段目标车道与入度路段目标车道之间的夹角落入所述直角范围,则认为所述出度路段目标车道与入度路段目标车道之间的位置关系为近似直角,则所述道路引导类型就可确定为直角转弯。其中,所述预设角度为一较小角度,比如,所述预设角度可设置为5度,以使得处于所述直角范围内的角度为直角或者近似直角。Wherein, the right angle range refers to the angle range formed by increasing or decreasing the preset angle at the right angle. Considering that the positional relationship between the target lane of the out-degree road section and the target lane of the in-degree road section is an approximate right angle, the road guidance type can be determined to be a right-angle turn. The preset angle is a relatively small angle, for example, the preset angle may be set to 5 degrees, so that the angle within the right angle range is a right angle or an approximate right angle.
其中,所述平角范围指的是平角增加或者减小预设角度而形成的角度范围,若所述出度路段目标车道与入度路段目标车道之间的夹角落入所述平角范围,则认为所述出度路段目标车道与入度路段目标车道之间的位置关系为近似平行,进一步地,若所述出度路段目标车道与入度路段目标车道的行进方向相反,说明车辆想要平行掉头,因此此时所述道路引导类型可确定为平行掉头转弯,类似地,若所述出度路段目标车道与入度路段目标车道的行进方向相同,说明车辆想要交错行驶,因此此时所述道路引导类型可确定为平行转弯。其中,与上文类似,所述预设角度为一较小角度,比如,所述预设角度可设置为5度,以使得处于所述平角范围内的角度为平角或者近似平角。Wherein, the flat angle range refers to the angle range formed by increasing or decreasing the flat angle by a preset angle. It is considered that the positional relationship between the target lane of the out-degree road section and the target lane of the in-degree road section is approximately parallel. U-turn, so the road guidance type can be determined to be a parallel U-turn at this time. Similarly, if the target lane of the out-degree road section and the target lane of the in-degree road section are in the same direction of travel, it means that the vehicle wants to drive in a staggered manner. The above-mentioned road guidance type may be determined as a parallel turn. Wherein, similar to the above, the preset angle is a relatively small angle, for example, the preset angle may be set to 5 degrees, so that the angle within the range of the flat angle is a flat angle or an approximately flat angle.
其中,所述锐角范围指的是锐角所处的角度范围,若所述出度路段目标车道与入度路段目标车道之间的夹角落入所述锐角范围,则认为所述出度路段目标车道与入度路段目标车道之间的位置关系为锐角,则所述道路引导类型就可确定为锐角转弯。需要说明的是,所述锐角范围与所述直角范围和平角范围之间均不存在重叠,比如,所述锐角范围可设置为0度+预设角度至90度-预设角度所形成的角度范围。The acute angle range refers to the angle range where the acute angle is located. If the angle between the target lane of the out-degree road section and the target lane of the in-degree road section falls into the acute angle range, the out-degree road section is considered to be the target lane. If the positional relationship between the lane and the target lane of the in-degree road section is an acute angle, the road guidance type can be determined to be an acute angle turn. It should be noted that there is no overlap between the acute angle range and the right angle range and the flat angle range. For example, the acute angle range can be set to an angle formed by 0 degrees + a preset angle to 90 degrees - a preset angle scope.
其中,所述钝角范围指的是钝角所处的角度范围,若所述出度路段目标车道与入度路段目标车道之间的夹角落入所述钝角范围,则认为所述出度路段目标车道与入度路段目标车道之间的位置关系为钝角,则所述道路引导类型就可确定为钝角转弯。需要说明的是,所述钝角范围与所述直角范围和平角范围之间也不存在重叠,比如,所述钝角范围可设置为90度+预设角度至180度-预设角度所形成的角度范围。Wherein, the obtuse angle range refers to the angle range where the obtuse angle is located. If the angle between the target lane of the out-degree road section and the target lane of the in-degree road section falls into the obtuse angle range, the out-degree road section target is considered to be If the positional relationship between the lane and the target lane of the in-degree road section is an obtuse angle, the road guidance type can be determined to be an obtuse angle turn. It should be noted that there is no overlap between the obtuse angle range and the right angle range and the flat angle range. For example, the obtuse angle range can be set to an angle formed by 90 degrees + a preset angle to 180 degrees - a preset angle scope.
在本公开一实施方式中,所述步骤S103,即根据所述道路引导类型,获取道路引导图示生成参数的步骤,可包括以下步骤:In an embodiment of the present disclosure, the step S103, that is, the step of obtaining the road guidance icon generation parameter according to the road guidance type, may include the following steps:
当所述道路引导类型为直角转弯、锐角转弯、钝角转弯或平行转弯时,所述道路引导图示生成参数包括:出度路段目标车道尺寸、入度路段目标车道尺寸和相应路口边界位置;When the road guidance type is a right-angle turn, an acute-angle turn, an obtuse-angle turn or a parallel turn, the parameters for generating the road guidance icon include: the target lane size of the out-degree road section, the target lane size of the in-degree road section, and the corresponding intersection boundary position;
当所述道路引导类型为平行掉头转弯时,所述道路引导图示生成参数包括:出度路段目标车道尺寸、入度路段目标车道尺寸、出度路段目标车道与入度路段目标车道之间的距离和相应路口边界位置。When the road guidance type is a parallel U-turn, the road guidance graphic generation parameters include: the target lane size of the out-degree road section, the target lane size of the in-degree road section, the difference between the target lane of the out-degree road section and the target lane of the in-degree road section Distance and corresponding intersection boundary location.
在该实施方式中,当所述道路引导类型为直角转弯、锐角转弯、钝角转弯或平行转弯时,只需出度路段目标车道尺寸、入度路段目标车道尺寸和相应路口边界位置等参数即可生成所述参数生成道路引导图示;而当所述道路引导类型为平行掉头转弯时,除了上述道路引导图示生成参数,还需获取出度路段目标车道与入度路段目标车道之间的距离作为所述道路引导图示生成参数来生成道路引导图示。In this embodiment, when the road guidance type is a right-angle turn, an acute-angle turn, an obtuse-angle turn, or a parallel turn, only parameters such as the target lane size of the out-degree road section, the target lane size of the in-degree road section, and the corresponding intersection boundary position can be Generate the parameters to generate a road guidance icon; and when the road guidance type is a parallel U-turn, in addition to the above road guidance icon generation parameters, it is also necessary to obtain the distance between the target lane of the out-degree road section and the target lane of the in-degree road section A road guidance picture is generated as the road guidance picture generation parameter.
获取得到所述道路引导图示生成参数后,就可根据所述道路引导图示生成参数来生成道路引导图示了,下文以不同道路引导类型为例分别对于道路引导图示的生成进行解释和说明。After obtaining the road guidance icon generation parameters, the road guidance icon can be generated according to the road guidance icon generation parameters. The following takes different road guidance types as examples to explain and explain the generation of road guidance icons respectively. illustrate.
当所述道路引导类型为直角转弯时,所述步骤S104,即根据所述道路引导图示生成参数,生成道路引导图示的步骤,可包括以下步骤:When the road guidance type is a right-angle turn, the step S104, that is, the step of generating a road guidance icon according to the generation parameters of the road guidance icon, may include the following steps:
根据所述出度路段目标车道尺寸和入度路段目标车道尺寸确定所述出度路段目标车道尺寸的出度中心延长线和入度路段目标车道的入度中心延长线,得到两条中心延长线的交点;According to the target lane size of the out-degree road section and the target lane size of the in-degree road section, determine the out-degree center extension line of the target lane size of the out-degree road section and the in-degree center extension line of the target lane of the in-degree road section, and obtain two center extension lines the intersection point;
从交点沿所述出度路段目标车道方向和入度路段目标车道反方向分别延长第一距离,得到出度端点和入度端点,其中,所述第一距离为从所述交点沿所述出度路段目标车道方向和入度路段目标车道反方向分别延长至路口边界的较短距离的第一预设比例;Extend the first distance from the intersection in the direction of the target lane of the out-degree section and the opposite direction of the target lane of the in-degree section, respectively, to obtain the out-degree end point and the in-degree end point, wherein the first distance is the direction from the intersection point along the out-degree section. The first preset ratio of the short distance between the target lane direction of the degree road section and the opposite direction of the target lane of the in-degree road section respectively extending to the boundary of the intersection;
以所述出度端点和入度端点为切点,生成中心线与所述出度中心延长线和入度中心延长线相切的圆弧,其中,所述圆弧的角度为所述出度路段目标车道和入度路段目标车道之间的夹角,所述圆弧的宽度为预设宽度;Taking the out-degree endpoint and the in-degree endpoint as tangent points, generate an arc whose center line is tangent to the out-degree center extension line and the in-degree center extension line, wherein the angle of the arc is the out-degree the angle between the target lane of the road section and the target lane of the in-degree road section, and the width of the arc is a preset width;
自所述圆弧靠近出度路段目标车道的端面,沿着所述出度路段目标车道的方向生成箭头,其中,所述箭头的宽度为预设宽度;From the end face of the arc close to the target lane of the out-degree road section, an arrow is generated along the direction of the out-degree road section target lane, wherein the width of the arrow is a preset width;
自所述圆弧靠近入度路段目标车道的端面,沿着所述入度路段目标车道的反方向生成箭尾,其中,所述箭尾的宽度为预设宽度;From the end face of the arc close to the target lane of the in-degree road section, a nock tail is generated along the opposite direction of the target lane of the in-degree road section, wherein the width of the nock tail is a preset width;
顺次连接所述箭头、圆弧和箭尾,生成道路引导图示。The arrows, arcs, and nocks are connected in sequence to generate a road guidance illustration.
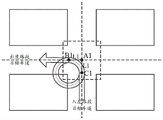
在该实施方式中,当所述道路引导类型为直角转弯,生成道路引导图示时,如图2A所示:In this embodiment, when the road guidance type is a right-angle turn, and a road guidance icon is generated, as shown in FIG. 2A :
首先根据所述出度路段目标车道尺寸和入度路段目标车道尺寸确定所述出度路段目标车道尺寸的出度中心延长线和入度路段目标车道的入度中心延长线,然后使两条中心延长线相交,得到交点A1;Firstly, according to the target lane size of the out-degree road section and the target lane size of the in-degree road section, determine the out-degree center extension line of the target lane size of the out-degree road section and the in-degree center extension line of the target lane of the in-degree road section, and then make the two centers The extension lines intersect, and the intersection point A1 is obtained;
然后从交点A1出发,沿所述出度路段目标车道方向和入度路段目标车道反方向分别延长第一距离L1,得到出度端点B1和入度端点C1,其中,所述第一距离L1为从所述交点A1沿所述出度路段目标车道方向延长至路口边界的距离与从所述交点A1沿所述入度路段目标车道反方向延长至路口边界的距离中的较短距离的第一预设比例,其中,所述第一预设比例可根据实际应用的需要进行设置,比如可设置为2/3,本公开对于所述第一预设比例的具体取值不作特别限定;Then, starting from the intersection A1, extend the first distance L1 along the direction of the target lane of the out-degree road segment and the opposite direction of the target lane of the in-degree road segment, respectively, to obtain the out-degree end point B1 and the in-degree end point C1, wherein the first distance L1 is The first one of the shorter distance between the distance extending from the intersection A1 in the direction of the target lane of the out-degree section to the boundary of the intersection and the distance extending from the intersection A1 in the opposite direction of the target lane of the in-degree section to the boundary of the intersection A preset ratio, wherein the first preset ratio can be set according to the needs of practical applications, for example, it can be set to 2/3, and the specific value of the first preset ratio is not particularly limited in the present disclosure;
然后以所述出度端点B1和入度端点C1为切点,生成中心线与所述出度中心延长线和入度中心延长线相切的、具有预设宽度的、角度为所述出度路段目标车道和入度路段目标车道之间的夹角的圆弧,即所述圆弧的中心线与所述出度中心延长线和入度中心延长线相切,且切点分别为所述出度端点B1和入度端点C1;Then, taking the out-degree endpoint B1 and the in-degree endpoint C1 as tangent points, generate an angle with a preset width that is tangent to the out-degree center extension line and in-degree center extension line, and whose angle is the out-degree The arc of the angle between the target lane of the road segment and the target lane of the in-degree road segment, that is, the center line of the arc is tangent to the extension line of the out-degree center and the extension line of the in-degree center, and the tangent points are the Out-degree endpoint B1 and in-degree endpoint C1;
然后自所述圆弧靠近出度路段目标车道的端面,沿着所述出度路段目标车道的方向生成具有同样预设宽度的箭头,自所述圆弧靠近入度路段目标车道的端面,沿着所述入度路段目标车道的反方向生成具有同样预设宽度箭尾;Then, an arrow with the same preset width is generated from the end face of the target lane of the out-degree road section from the arc, and an arrow with the same preset width is generated along the direction of the target lane of the out-degree road section. generating a nock with the same preset width in the opposite direction of the target lane of the in-degree road section;
最后将所述箭头、圆弧和箭尾顺次连接起来,即可生成所述道路引导图示。Finally, connect the arrows, arcs and nock tails in sequence to generate the road guidance diagram.
当所述道路引导类型为锐角转弯时,所述步骤S104,即根据所述道路引导图示生成参数,生成道路引导图示的步骤,可包括以下步骤:When the road guidance type is an acute angle turn, the step S104, that is, the step of generating a road guidance icon according to the road guidance icon generation parameters, may include the following steps:
根据所述出度路段目标车道尺寸和入度路段目标车道尺寸确定所述出度路段目标车道尺寸的出度中心延长线和入度路段目标车道的入度中心延长线,得到两条中心延长线的交点;According to the target lane size of the out-degree road section and the target lane size of the in-degree road section, determine the out-degree center extension line of the target lane size of the out-degree road section and the in-degree center extension line of the target lane of the in-degree road section, and obtain two center extension lines the intersection point;
从交点沿所述出度路段目标车道方向和入度路段目标车道反方向分别延长第二距离,得到出度端点和入度端点,其中,所述第二距离为从所述交点沿所述出度路段目标车道方向和入度路段目标车道反方向分别延长至路口边界的较短距离减去第一预设距离;Extend the second distance from the intersection along the direction of the target lane of the out-degree section and the opposite direction of the target lane of the in-degree section, respectively, to obtain the out-degree end point and the in-degree end point, wherein the second distance is the direction from the intersection point along the out-degree section. The direction of the target lane of the degree road section and the opposite direction of the target lane of the in-degree road section are respectively extended to the shorter distance of the intersection boundary minus the first preset distance;
以所述出度端点和入度端点为切点,生成中心线与所述出度中心延长线和入度中心延长线相切的圆弧,其中,所述圆弧的角度为出度端点、交点和入度端点形成的夹角的补角,所述圆弧的宽度为预设宽度;Taking the out-degree endpoint and in-degree endpoint as tangent points, generate an arc whose center line is tangent to the out-degree center extension line and the in-degree center extension line, wherein the angle of the arc is the out-degree endpoint, The supplementary angle of the included angle formed by the intersection point and the in-degree endpoint, and the width of the arc is a preset width;
自所述圆弧靠近出度路段目标车道的端面,沿着所述出度路段目标车道的方向生成箭头,其中,所述箭头的宽度为预设宽度;From the end face of the arc close to the target lane of the out-degree road section, an arrow is generated along the direction of the out-degree road section target lane, wherein the width of the arrow is a preset width;
自所述圆弧靠近入度路段目标车道的端面,沿着所述入度路段目标车道的反方向生成箭尾,其中,所述箭尾的宽度为预设宽度;From the end face of the arc close to the target lane of the in-degree road section, a nock tail is generated along the opposite direction of the target lane of the in-degree road section, wherein the width of the nock tail is a preset width;
顺次连接所述箭头、圆弧和箭尾,生成道路引导图示。The arrows, arcs, and nocks are connected in sequence to generate a road guidance illustration.
在该实施方式中,当所述道路引导类型为锐角转弯,生成道路引导图示时,如图2B所示:In this embodiment, when the road guidance type is an acute angle turn, and a road guidance icon is generated, as shown in FIG. 2B :
首先根据所述出度路段目标车道尺寸和入度路段目标车道尺寸确定所述出度路段目标车道尺寸的出度中心延长线和入度路段目标车道的入度中心延长线,然后使两条中心延长线相交,得到交点A2;Firstly, according to the target lane size of the out-degree road section and the target lane size of the in-degree road section, determine the out-degree center extension line of the target lane size of the out-degree road section and the in-degree center extension line of the target lane of the in-degree road section, and then make the two centers The extension lines intersect, and the intersection point A2 is obtained;
然后从交点A2出发,沿所述出度路段目标车道方向和入度路段目标车道反方向分别延长第二距离L2,得到出度端点B2和入度端点C2,其中,所述第二距离L2为从所述交点A2沿所述出度路段目标车道方向延长至路口边界的距离与从所述交点A2沿所述入度路段目标车道反方向延长至路口边界的距离中的较短距离再减去第一预设距离得到的距离值,其中,所述第一预设距离可根据实际应用的需要进行设置,比如可设置为3-5米,本公开对于所述第一预设距离的具体取值不作特别限定;Then, starting from the intersection point A2, extend the second distance L2 along the direction of the target lane of the out-degree section and the opposite direction of the target lane of the in-degree section, respectively, to obtain the out-degree endpoint B2 and the in-degree endpoint C2, wherein the second distance L2 is Subtract the shorter distance between the distance extending from the intersection A2 in the direction of the target lane of the out-degree section to the boundary of the intersection and the distance extending from the intersection A2 in the opposite direction of the target lane of the in-degree section to the boundary of the intersection. The distance value obtained by the first preset distance, wherein the first preset distance can be set according to the needs of the actual application, for example, it can be set to 3-5 meters. The value is not particularly limited;
然后以所述出度端点B2和入度端点C2为切点,生成中心线与所述出度中心延长线和入度中心延长线相切的、具有预设宽度的、角度为出度端点B2、交点A2和入度端点C2形成的夹角的补角的圆弧;Then, taking the out-degree endpoint B2 and the in-degree endpoint C2 as tangent points, generate an angle with a preset width that is tangent to the out-degree center extension line and the in-degree center extension line and is the out-degree endpoint B2 , the arc of the supplementary angle of the included angle formed by the intersection point A2 and the in-degree endpoint C2;
然后自所述圆弧靠近出度路段目标车道的端面,沿着所述出度路段目标车道的方向生成具有同样预设宽度的箭头,自所述圆弧靠近入度路段目标车道的端面,沿着所述入度路段目标车道的反方向生成具有同样预设宽度的箭尾;Then, an arrow with the same preset width is generated from the end face of the target lane of the out-degree road section from the arc, and an arrow with the same preset width is generated along the direction of the target lane of the out-degree road section. generating a nock with the same preset width in the opposite direction of the target lane of the in-degree road section;
最后将所述箭头、圆弧和箭尾顺次连接起来,即可生成所述道路引导图示。Finally, connect the arrows, arcs and nock tails in sequence to generate the road guidance diagram.
当所述道路引导类型为钝角转弯时,所述步骤S104,即根据所述道路引导图示生成参数,生成道路引导图示的步骤,可包括以下步骤:When the road guidance type is an obtuse-angle turn, the step S104, that is, the step of generating a road guidance icon according to the generation parameters of the road guidance icon, may include the following steps:
根据所述出度路段目标车道尺寸和入度路段目标车道尺寸确定所述出度路段目标车道尺寸的出度中心延长线和入度路段目标车道的入度中心延长线,得到两条中心延长线的交点;According to the target lane size of the out-degree road section and the target lane size of the in-degree road section, determine the out-degree center extension line of the target lane size of the out-degree road section and the in-degree center extension line of the target lane of the in-degree road section, and obtain two center extension lines the intersection point;
从交点沿所述出度路段目标车道方向和入度路段目标车道反方向分别延长第三距离,得到出度端点和入度端点,其中,所述第三距离为从所述交点沿所述出度路段目标车道方向和入度路段目标车道反方向分别延长至路口边界的较短距离的第二预设比例;Extend a third distance from the intersection in the direction of the target lane of the out-degree road segment and the opposite direction of the target lane of the in-degree road segment, respectively, to obtain the out-degree end point and the in-degree end point, wherein the third distance is the direction from the intersection point along the out-degree road segment. The second preset ratio of the short distance between the target lane direction of the degree road section and the opposite direction of the target lane of the in-degree road section respectively extending to the boundary of the intersection;
以所述出度端点和入度端点为切点,生成中心线与所述出度中心延长线和入度中心延长线相切的圆弧,其中,所述圆弧的角度为出度端点、交点和入度端点形成的夹角的补角,所述圆弧的宽度为预设宽度;Taking the out-degree endpoint and in-degree endpoint as tangent points, generate an arc whose center line is tangent to the out-degree center extension line and the in-degree center extension line, wherein the angle of the arc is the out-degree endpoint, The supplementary angle of the included angle formed by the intersection point and the in-degree endpoint, and the width of the arc is a preset width;
自所述圆弧靠近出度路段目标车道的端面,沿着所述出度路段目标车道的方向生成箭头,其中,所述箭头的宽度为预设宽度;From the end face of the arc close to the target lane of the out-degree road section, an arrow is generated along the direction of the out-degree road section target lane, wherein the width of the arrow is a preset width;
自所述圆弧靠近入度路段目标车道的端面,沿着所述入度路段目标车道的反方向生成箭尾,其中,所述箭尾的宽度为预设宽度;From the end face of the arc close to the target lane of the in-degree road section, a nock tail is generated along the opposite direction of the target lane of the in-degree road section, wherein the width of the nock tail is a preset width;
顺次连接所述箭头、圆弧和箭尾,生成道路引导图示。The arrows, arcs, and nocks are connected in sequence to generate a road guidance illustration.
在该实施方式中,当所述道路引导类型为钝角转弯,生成道路引导图示时,如图2C所示:In this embodiment, when the road guidance type is an obtuse angle turn, and a road guidance icon is generated, as shown in FIG. 2C :
首先根据所述出度路段目标车道尺寸和入度路段目标车道尺寸确定所述出度路段目标车道尺寸的出度中心延长线和入度路段目标车道的入度中心延长线,然后使两条中心延长线相交,得到交点A3;Firstly, according to the target lane size of the out-degree road section and the target lane size of the in-degree road section, determine the out-degree center extension line of the target lane size of the out-degree road section and the in-degree center extension line of the target lane of the in-degree road section, and then make the two centers The extension lines intersect, and the intersection point A3 is obtained;
然后从交点A3出发,沿所述出度路段目标车道方向和入度路段目标车道反方向分别延长第三距离L3,得到出度端点B3和入度端点C3,其中,所述第三距离L3为从所述交点A3沿所述出度路段目标车道方向延长至路口边界的距离与从所述交点A3沿所述入度路段目标车道反方向延长至路口边界的距离中的较短距离的第二预设比例,其中,所述第二预设比例可根据实际应用的需要进行设置,比如可设置为2/3,所述第二预设比例可设置为与所述第一预设比例相等,也可设置为与所述第一预设比例不相等,本公开对于所述第二预设比例的具体取值不作特别限定;Then, starting from the intersection point A3, extend the third distance L3 along the direction of the target lane of the out-degree road segment and the opposite direction of the target lane of the in-degree road segment, respectively, to obtain the out-degree end point B3 and the in-degree end point C3, wherein the third distance L3 is The second is the shorter of the distance extending from the intersection A3 in the direction of the target lane of the out-degree link to the boundary of the intersection and the distance extending from the intersection A3 in the opposite direction of the target lane of the in-degree link to the boundary of the intersection. a preset ratio, wherein the second preset ratio can be set according to the needs of the actual application, for example, it can be set to 2/3, and the second preset ratio can be set to be equal to the first preset ratio, It can also be set to be unequal to the first preset ratio, and the present disclosure does not specifically limit the specific value of the second preset ratio;
然后以所述出度端点B3和入度端点C3为切点,生成中心线与所述出度中心延长线和入度中心延长线相切的、具有预设宽度的、角度为出度端点B3、交点A3和入度端点C3形成的夹角的补角的圆弧;Then, taking the out-degree endpoint B3 and the in-degree endpoint C3 as tangent points, generate an angle with a preset width that is tangent to the out-degree center extension line and the in-degree center extension line and is the out-degree endpoint B3 , the arc of the supplementary angle of the included angle formed by the intersection point A3 and the in-degree endpoint C3;
然后自所述圆弧靠近出度路段目标车道的端面,沿着所述出度路段目标车道的方向生成具有同样预设宽度的箭头,自所述圆弧靠近入度路段目标车道的端面,沿着所述入度路段目标车道的反方向生成具有同样预设宽度的箭尾;Then, an arrow with the same preset width is generated from the end face of the target lane of the out-degree road section from the arc, and an arrow with the same preset width is generated along the direction of the target lane of the out-degree road section. generating a nock with the same preset width in the opposite direction of the target lane of the in-degree road section;
最后将所述箭头、圆弧和箭尾顺次连接起来,即可生成所述道路引导图示。Finally, connect the arrows, arcs and nock tails in sequence to generate the road guidance diagram.
当所述道路引导类型为平行转弯时,所述步骤S104,即根据所述道路引导图示生成参数,生成道路引导图示的步骤,可包括以下步骤:When the road guidance type is a parallel turn, the step S104, that is, the step of generating a road guidance icon according to the generation parameters of the road guidance icon, may include the following steps:
根据所述出度路段目标车道尺寸和入度路段目标车道尺寸确定所述出度路段目标车道尺寸的出度中心延长线和入度路段目标车道的入度中心延长线,得到两条中心延长线分别与对应路口边界的交点;According to the target lane size of the out-degree road section and the target lane size of the in-degree road section, determine the out-degree center extension line of the target lane size of the out-degree road section and the in-degree center extension line of the target lane of the in-degree road section, and obtain two center extension lines The intersections with the corresponding intersection boundaries, respectively;
从两个交点分别相向延长第二预设距离,得到第一出度端点和第一入度端点,再延长第三预设距离,得到第二出度端点和第二入度端点;Extend the second preset distance from the two intersection points to obtain the first out-degree endpoint and the first in-degree endpoint, and then extend the third preset distance to obtain the second out-degree endpoint and the second in-degree endpoint;
连接所述第二出度端点和第二入度端点,其中,所述第二出度端点和第二入度端点之间的连线长度大于第三预设距离的预设倍数;connecting the second out-degree endpoint and the second in-degree endpoint, wherein the length of the connection between the second out-degree endpoint and the second in-degree endpoint is greater than a preset multiple of a third preset distance;
在所述第二出度端点和第二入度端点的连线上确定第一切点和第二切点,其中,所述第一切点与所述第二出度端点之间的距离以及所述第二切点与所述第二入度端点之间的距离均为所述第三预设距离;A first tangent point and a second tangent point are determined on a line connecting the second out-degree endpoint and the second in-degree endpoint, wherein the distance between the first tangent point and the second out-degree endpoint and The distance between the second tangent point and the second in-degree endpoint is the third preset distance;
以所述第一入度端点和第二切点为切点,生成中心线与所述第一入度端点和第二入度端点之间的连线、所述第二入度端点和第二切点之间的连线相切的第一圆弧,其中,所述第一圆弧的角度为第一入度端点、第二入度端点和第二切点形成的夹角的补角,所述第一圆弧的宽度为预设宽度;Taking the first in-degree endpoint and the second tangent point as tangent points, generating a connection line between the center line and the first in-degree endpoint and the second in-degree endpoint, the second in-degree endpoint and the second in-degree endpoint The first arc where the connection line between the tangent points is tangent, wherein the angle of the first arc is the supplementary angle of the angle formed by the first in-degree endpoint, the second in-degree endpoint and the second tangent point, The width of the first arc is a preset width;
以所述第一出度端点和第一切点为切点,生成中心线与所述第一出度端点和第二出度端点之间的连线、所述第二入度端点和第一切点之间的连线相切的第二圆弧,其中,所述第二圆弧的角度为第一出度端点、第二出度端点和第一切点形成的夹角的补角,所述第二圆弧的宽度为预设宽度;Using the first out-degree endpoint and the first tangent point as tangent points, generate a connection line between the center line and the first out-degree endpoint and the second out-degree endpoint, the second in-degree endpoint and the first The second arc where the connection line between the tangent points is tangent, wherein the angle of the second arc is the supplementary angle of the angle formed by the first out-degree endpoint, the second out-degree endpoint and the first tangent point, The width of the second arc is a preset width;
自所述第二圆弧靠近出度路段目标车道的端面,沿着所述出度路段目标车道的方向生成箭头,其中,所述箭头的宽度为预设宽度;From the end face of the second arc close to the target lane of the out-degree road section, an arrow is generated along the direction of the out-degree road section target lane, wherein the width of the arrow is a preset width;
自所述第一圆弧靠近入度路段目标车道的端面,沿着所述入度路段目标车道的反方向生成箭尾,其中,所述箭尾的宽度为预设宽度;From the end face of the first arc close to the target lane of the in-degree road section, a nock tail is generated along the opposite direction of the target lane of the in-degree road section, wherein the width of the nock tail is a preset width;
填充所述第一圆弧和第二圆弧之间的接续部分;filling the continuation between the first arc and the second arc;
顺次连接所述箭头、第一圆弧、接续部分、第二圆弧和箭尾,生成道路引导图示。The arrow, the first arc, the continuation portion, the second arc, and the nock are sequentially connected to generate a road guidance illustration.
在该实施方式中,当所述道路引导类型为平行转弯,生成道路引导图示时,如图2D所示:In this embodiment, when the road guidance type is parallel turning, a road guidance icon is generated, as shown in FIG. 2D :
首先根据所述出度路段目标车道尺寸和入度路段目标车道尺寸确定所述出度路段目标车道尺寸的出度中心延长线和入度路段目标车道的入度中心延长线,得到两条中心延长线分别与对应路口边界的交点G1和H1;Firstly, according to the target lane size of the out-degree road section and the target lane size of the in-degree road section, the out-degree center extension line of the target lane size of the out-degree road section and the in-degree center extension line of the target lane of the in-degree road section are determined, and two center extension lines are obtained. The intersections G1 and H1 of the line with the corresponding intersection boundary respectively;
然后从两个交点G1和H1出发,分别相向延长第二预设距离K,得到第一出度端点E和第一入度端点F,再从所述出度端点E和第一入度端点F出发,相向延长第三预设距离L4,得到第二出度端点A4和第二入度端点B4;Then, starting from the two intersection points G1 and H1, respectively extend the second preset distance K toward each other to obtain the first out-degree endpoint E and the first in-degree endpoint F, and then from the out-degree endpoint E and the first in-degree endpoint F Start, extend the third preset distance L4 toward each other, and obtain the second out-degree endpoint A4 and the second in-degree endpoint B4;
然后连接所述第二出度端点A4和第二入度端点B4,其中,所述第二出度端点A4和第二入度端点B4之间的连线的长度需大于第三预设距离L4的预设倍数,其中,所述预设倍数可根据实际应用的需要进行设置,比如可设置为2,本公开对于所述预设倍数的具体取值不作特别限定,若所述第二出度端点A4和第二入度端点B4之间的连线的长度小于第三预设距离的预设倍数,则可重新设置所述第三预设距离L4,使得所述第二出度端点A4和第二入度端点B4之间的连线的长度大于第三预设距离L4的预设倍数;Then connect the second out-degree endpoint A4 and the second in-degree endpoint B4, wherein the length of the connection between the second out-degree endpoint A4 and the second in-degree endpoint B4 must be greater than the third preset distance L4 The preset multiple, wherein the preset multiple can be set according to the needs of the actual application, for example, can be set to 2, the present disclosure does not specifically limit the specific value of the preset multiple, if the second out-degree The length of the connecting line between the endpoint A4 and the second in-degree endpoint B4 is less than a preset multiple of the third preset distance, then the third preset distance L4 can be reset so that the second out-degree endpoint A4 and The length of the connection line between the second in-degree endpoints B4 is greater than the preset multiple of the third preset distance L4;
然后在所述第二出度端点A4和第二入度端点B4之间的连线上确定第一切点C4和第二切点D4,其中,所述第一切点C4与所述第二出度端点A4之间的距离以及所述第二切点D4与所述第二入度端点B4之间的距离均与所述第三预设距离L4相等;Then, a first tangent point C4 and a second tangent point D4 are determined on the connecting line between the second out-degree endpoint A4 and the second in-degree endpoint B4, wherein the first tangent point C4 and the second tangent point C4 The distance between the out-degree endpoints A4 and the distance between the second tangent point D4 and the second in-degree endpoint B4 are equal to the third preset distance L4;
然后以所述第一入度端点F和第二切点D4为切点,生成中心线与所述第一入度端点F和第二入度端点B4之间的连线、以及与所述第二入度端点B4和第二切点D4之间的连线均相切的、具有预设宽度的、角度为第一入度端点F、第二入度端点B4和第二切点D4形成的夹角的补角的第一圆弧;Then, taking the first in-degree endpoint F and the second in-degree endpoint D4 as tangent points, a line connecting the center line with the first in-degree endpoint F and the second in-degree endpoint B4 and the connection with the first in-degree endpoint F and the second in-degree endpoint B4 are generated. The connection lines between the two in-degree endpoints B4 and the second tangent point D4 are all tangent and have a preset width, and the angle is formed by the first in-degree endpoint F, the second in-degree endpoint B4 and the second tangent point D4 The first arc of the supplementary angle of the included angle;
然后以所述第一出度端点E和第一切点C4为切点,生成中心线与所述第一出度端点E和第二出度端点A4之间的连线、以及与所述第二出度端点A4和第一切点C4之间的连线均相切的、具有预设宽度的、角度为第一出度端点E、第二出度端点A4和第一切点C4形成的夹角的补角的第二圆弧;Then, using the first out-degree end point E and the first tangent point C4 as tangent points, generate the connection line between the center line and the first out-degree end point E and the second out-degree end point A4, and the connection with the first out-degree end point E and the second out degree end point A4. The connection lines between the two out-degree endpoints A4 and the first tangent point C4 are all tangent, have a preset width, and the angle is formed by the first out-degree endpoint E, the second out-degree endpoint A4 and the first tangent point C4 The second arc of the supplementary angle of the included angle;
然后自所述第二圆弧靠近出度路段目标车道的端面,沿着所述出度路段目标车道的方向生成具有同样预设宽度的箭头,自所述第一圆弧靠近入度路段目标车道的端面,沿着所述入度路段目标车道的反方向生成具有同样预设宽度的箭尾;Then, an arrow with the same preset width is generated along the direction of the target lane of the out-degree section from the second arc close to the end face of the target lane of the out-degree section, and from the first arc close to the target lane of the in-degree section the end face of the in-degree road section, generating a nock with the same preset width along the opposite direction of the target lane of the in-degree road section;
然后填充所述第一圆弧和第二圆弧之间的接续部分;then filling the continuation between the first arc and the second arc;
最后将所述箭头、第一圆弧、接续部分、第二圆弧和箭尾顺次连接起来,即可生成所述道路引导图示。Finally, connect the arrow, the first arc, the continuation part, the second arc and the nock in sequence to generate the road guidance diagram.
当所述道路引导类型为平行掉头转弯且出度路段目标车道中心延长线和入度路段目标车道中心延长线之间的距离小于或等于第四预设距离时,其中,所述第四预设距离可根据实际应用的需要进行设置,比如可设置为6*预设宽度,本公开对于所述第四预设距离的具体取值不作特别限定,所述步骤S104,即根据所述道路引导图示生成参数,生成道路引导图示的步骤,可包括以下步骤:When the road guidance type is a parallel U-turn and the distance between the extension line of the center of the target lane of the out-degree road segment and the extension line of the center of the target lane of the in-degree road segment is less than or equal to a fourth preset distance, wherein the fourth preset The distance can be set according to the needs of practical applications, for example, it can be set to 6*preset width, and the specific value of the fourth preset distance is not particularly limited in this disclosure. The step S104 is based on the road guidance map. The steps of generating the road guidance diagram by using the parameters for generating the road guidance diagram may include the following steps:
从所述出度路段目标车道中心延长线和入度路段目标车道中心延长线与路口边界的交点出发,沿着入度路段目标车道方向延长第五预设距离,得到出度端点和入度端点;Starting from the intersection of the extension line of the center of the target lane of the out-degree road section and the extension line of the target lane of the in-degree road section and the boundary of the intersection, extend the fifth preset distance along the direction of the target lane of the in-degree road section to obtain the out-degree end point and the in-degree end point ;
以所述出度端点和入度端点作为圆弧中心线端点,生成半圆弧,其中,所述圆弧中心线的半径为出度路段目标车道中心延长线和入度路段目标车道中心延长线距离的一半,所述圆弧的宽度为预设宽度;Taking the out-degree endpoints and in-degree endpoints as the arc centerline endpoints, a semi-circular arc is generated, wherein the radius of the arc centerline is the out-degree segment target lane center extension line and the in-degree segment target lane center extension line half of the distance, the width of the arc is the preset width;
自所述圆弧靠近出度路段目标车道的端面,沿着所述出度路段目标车道的方向生成箭头,其中,所述箭头的宽度为预设宽度;From the end face of the arc close to the target lane of the out-degree road section, an arrow is generated along the direction of the out-degree road section target lane, wherein the width of the arrow is a preset width;
自所述圆弧靠近入度路段目标车道的端面,沿着所述入度路段目标车道的反方向生成箭尾,其中,所述箭尾的宽度为预设宽度;From the end face of the arc close to the target lane of the in-degree road section, a nock tail is generated along the opposite direction of the target lane of the in-degree road section, wherein the width of the nock tail is a preset width;
顺次连接所述箭头、圆弧和箭尾,生成道路引导图示。The arrows, arcs, and nocks are connected in sequence to generate a road guidance illustration.
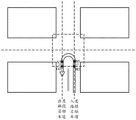
在该实施方式中,当所述道路引导类型为平行掉头转弯且出度路段目标车道中心延长线和入度路段目标车道中心延长线之间的距离小于或等于第四预设距离,生成道路引导图示时,如图2E所示:In this embodiment, when the road guidance type is a parallel U-turn and the distance between the extension line of the center of the target lane of the out-degree road section and the extension line of the center line of the target lane of the in-degree road section is less than or equal to a fourth preset distance, a road guidance is generated. When illustrated, as shown in Figure 2E:
首先根据所述出度路段目标车道尺寸和入度路段目标车道尺寸确定所述出度路段目标车道尺寸的出度中心延长线和入度路段目标车道的入度中心延长线,得到两条中心延长线分别与对应路口边界的交点G2和H2;Firstly, according to the target lane size of the out-degree road section and the target lane size of the in-degree road section, the out-degree center extension line of the target lane size of the out-degree road section and the in-degree center extension line of the target lane of the in-degree road section are determined, and two center extension lines are obtained. The intersections G2 and H2 of the line with the corresponding intersection boundary respectively;
然后从两个交点G2和H2出发,沿着入度路段目标车道方向延长第五预设距离L5,得到出度端点A5和入度端点B5;Then, starting from the two intersection points G2 and H2, extend the fifth preset distance L5 along the direction of the target lane of the in-degree road section to obtain the out-degree endpoint A5 and the in-degree endpoint B5;
然后以所述出度端点A5和入度端点B5作为圆弧中心线的端点,生成一个具有预设宽度的半圆弧,其中,所述半圆弧的中心线的半径为出度路段目标车道中心延长线和入度路段目标车道中心延长线之间的距离的一半;Then, using the out-degree endpoint A5 and the in-degree endpoint B5 as the endpoints of the arc centerline, a semi-circular arc with a preset width is generated, wherein the radius of the center line of the semi-circular arc is the target lane of the out-degree road segment Half of the distance between the center extension line and the center extension line of the target lane of the in-degree segment;
然后自所述圆弧靠近出度路段目标车道的端面,沿着所述出度路段目标车道的方向生成具有同样预设宽度的箭头,自所述圆弧靠近入度路段目标车道的端面,沿着所述入度路段目标车道的反方向生成具有同样预设宽度的箭尾;Then, an arrow with the same preset width is generated from the end face of the target lane of the out-degree road section from the arc, and an arrow with the same preset width is generated along the direction of the target lane of the out-degree road section. generating a nock with the same preset width in the opposite direction of the target lane of the in-degree road section;
最后将所述箭头、圆弧和箭尾顺次连接起来,即可生成所述道路引导图示。Finally, connect the arrows, arcs and nock tails in sequence to generate the road guidance diagram.
当所述道路引导类型为平行掉头转弯且出度路段目标车道中心延长线和入度路段目标车道中心延长线之间的距离大于第四预设距离时,所述步骤S104,即根据所述道路引导图示生成参数,生成道路引导图示的步骤,可包括以下步骤:When the road guidance type is a parallel U-turn and the distance between the extension line of the target lane center of the out-degree road section and the extension line of the target lane center of the in-degree road section is greater than the fourth preset distance, the step S104 is based on the road The parameters for generating the guidance diagram, and the steps of generating the road guidance diagram may include the following steps:
从所述出度路段目标车道中心延长线和入度路段目标车道中心延长线与路口边界的交点出发,沿着入度路段目标车道方向延长第六预设距离,得到出度端点和入度端点;Starting from the intersection of the extension line of the center of the target lane of the out-degree road section and the extension line of the target lane of the in-degree road section and the boundary of the intersection, extend the sixth preset distance along the direction of the target lane of the in-degree road section to obtain the out-degree end point and the in-degree end point ;
生成所述出度路段目标车道与入度路段目标车道之间的连接车道的中心线;generating the center line of the connecting lane between the target lane of the out-degree road segment and the target lane of the in-degree road segment;
以所述出度端点为靠近出度路段目标车道的圆弧中心线端点,生成第一圆弧,其中,所述第一圆弧的角度为连接车道中心线与出度路段目标车道中心延长线夹角的补角,所述第一圆弧的半径为所述第四预设距离的第二预设比例,所述第一圆弧的宽度为预设宽度;Taking the out-degree end point as the end point of the circular arc centerline close to the target lane of the out-degree road section, a first circular arc is generated, wherein the angle of the first circular arc is the extension line connecting the lane center line and the out-degree road segment target lane center line The supplementary angle of the included angle, the radius of the first arc is the second preset ratio of the fourth preset distance, and the width of the first arc is the preset width;
以所述入度端点为靠近入度路段目标车道的圆弧中心线端点,生成第二圆弧,其中,所述第二圆弧的角度为连接车道中心线与入度路段目标车道中心延长线夹角的补角,所述第二圆弧的半径为所述第四预设距离的第二预设比例,所述第二圆弧的宽度为预设宽度;Taking the in-degree end point as the end point of the arc centerline close to the target lane of the in-degree road section, a second circular arc is generated, wherein the angle of the second circular arc is the extension line connecting the lane center line and the in-degree road section target lane center line The supplementary angle of the included angle, the radius of the second arc is the second preset ratio of the fourth preset distance, and the width of the second arc is the preset width;
自所述第一圆弧靠近出度路段目标车道的端面,沿着所述出度路段目标车道的方向生成箭头,其中,所述箭头的宽度为预设宽度;From the end face of the first arc close to the target lane of the out-degree road section, an arrow is generated along the direction of the out-degree road section target lane, wherein the width of the arrow is a preset width;
自所述第二圆弧靠近入度路段目标车道的端面,沿着所述入度路段目标车道的反方向生成箭尾,其中,所述箭尾的宽度为预设宽度;From the end face of the second arc close to the target lane of the in-degree road section, a nock tail is generated along the opposite direction of the target lane of the in-degree road section, wherein the width of the nock tail is a preset width;
沿着所述连接车道填充所述第一圆弧和第二圆弧之间的接续部分;filling the continuation between the first arc and the second arc along the connecting lane;
顺次连接所述箭头、第二圆弧、接续部分、第一圆弧和箭尾,生成道路引导图示。The arrow, the second arc, the continuation portion, the first arc, and the nock are connected in sequence to generate a road guidance illustration.
在该实施方式中,当所述道路引导类型为平行掉头转弯且出度路段目标车道中心延长线和入度路段目标车道中心延长线之间的距离大于第四预设距离,生成道路引导图示时,如图2F所示:In this embodiment, when the road guidance type is a parallel U-turn and the distance between the extension line of the center of the target lane of the out-degree road section and the extension line of the center of the target lane of the in-degree road section is greater than a fourth preset distance, a road guidance diagram is generated. , as shown in Figure 2F:
首先根据所述出度路段目标车道尺寸和入度路段目标车道尺寸确定所述出度路段目标车道尺寸的出度中心延长线和入度路段目标车道的入度中心延长线,得到两条中心延长线分别与对应路口边界的交点G3和H3;Firstly, according to the target lane size of the out-degree road section and the target lane size of the in-degree road section, the out-degree center extension line of the target lane size of the out-degree road section and the in-degree center extension line of the target lane of the in-degree road section are determined, and two center extension lines are obtained. The intersections G3 and H3 of the line with the corresponding intersection boundary respectively;
然后从两个交点G3和H3出发,沿着入度路段目标车道方向延长第六预设距离L6,得到出度端点A6和入度端点B6;Then, starting from the two intersection points G3 and H3, extend the sixth preset distance L6 along the direction of the target lane of the in-degree road section to obtain the out-degree endpoint A6 and the in-degree endpoint B6;
然后生成所述出度路段目标车道与入度路段目标车道之间的连接车道的中心线N;Then generate the center line N of the connecting lane between the target lane of the out-degree road segment and the target lane of the in-degree road segment;
然后以所述出度端点A6为靠近出度路段目标车道的圆弧的中心线端点,生成具有预设宽度的、角度为连接车道中心线与出度路段目标车道中心延长线夹角的补角的、半径为所述第四预设距离的第二预设比例的第一圆弧,其中,所述第二预设比例可根据实际应用的需要进行确定,比如可设置为1/3,本公开对于所述第二预设比例的具体取值不作特别限定;Then, taking the out-degree endpoint A6 as the centerline endpoint of the arc close to the target lane of the out-degree road section, generate a supplementary angle with a preset width whose angle is the included angle between the center line of the lane and the extension line of the target lane center of the out-degree road segment a first circular arc whose radius is a second preset ratio of the fourth preset distance, wherein the second preset ratio can be determined according to the needs of the actual application, for example, it can be set to 1/3, this It is disclosed that the specific value of the second preset ratio is not particularly limited;
然后以所述入度端点B6为靠近入度路段目标车道的圆弧的中心线端点,生成具有预设宽度的、角度为连接车道中心线与入度路段目标车道中心延长线夹角的补角的、半径依然为所述第四预设距离的第二预设比例的第二圆弧;Then, taking the in-degree end point B6 as the center line end point of the arc close to the target lane of the in-degree road section, generate a supplementary angle with a preset width whose angle is the included angle connecting the center line of the lane and the extension line of the target lane center of the in-degree road section , the radius is still the second arc of the second preset ratio of the fourth preset distance;
然后自所述第一圆弧靠近出度路段目标车道的端面,沿着所述出度路段目标车道的方向生成具有同样预设宽度的箭头,自所述第二圆弧靠近入度路段目标车道的端面,沿着所述入度路段目标车道的反方向生成具有同样预设宽度的箭尾;Then, an arrow with the same preset width is generated along the direction of the target lane of the out-degree road section from the end face of the first arc close to the target lane of the out-degree road section, and the second arc is close to the target lane of the in-degree road section from the second arc the end face of the in-degree road section, generating a nock with the same preset width along the opposite direction of the target lane of the in-degree road section;
然后沿着所述连接车道填充所述第一圆弧和第二圆弧之间的接续部分;then filling the continuation between the first arc and the second arc along the connecting lane;
最后将所述箭头、第二圆弧、接续部分、第一圆弧和箭尾顺次连接起来,即可生成所述道路引导图示。Finally, connect the arrow, the second arc, the continuation part, the first arc and the nock in sequence to generate the road guidance diagram.
在本公开一实施方式中,所述方法进一步包括以下步骤:In an embodiment of the present disclosure, the method further includes the following steps:
使用预设颜色填充所述道路引导图示,并显示在导航引导界面上。The road guidance icon is filled with a preset color and displayed on the navigation guidance interface.
为了使得道路引导图示更为鲜明,引起用户的注意,以为用户提供清晰正确的行驶引导,在该实施方式中,还使用预设颜色填充所述道路引导图示,并将填充了颜色的所述道路引导图示显示在导航引导界面上。其中,所述预设颜色可以为较为鲜明的颜色,比如黄色、橙色、红色等颜色。In order to make the road guidance icon more vivid, attract the user's attention, and provide the user with clear and correct driving guidance, in this embodiment, the road guidance icon is also filled with a preset color, and all the color-filled The above road guidance icons are displayed on the navigation guidance interface. Wherein, the preset color may be a relatively bright color, such as yellow, orange, red and other colors.
下述为本公开装置实施例,可以用于执行本公开方法实施例。The following are the apparatus embodiments of the present disclosure, which can be used to execute the method embodiments of the present disclosure.
图3示出根据本公开一实施方式的道路引导图示生成装置的结构框图,该装置可以通过软件、硬件或者两者的结合实现成为电子设备的部分或者全部。如图3所示,所述道路引导图示生成装置包括:FIG. 3 shows a block diagram of a structure of an apparatus for generating a road guidance illustration according to an embodiment of the present disclosure. The apparatus may be implemented as part or all of an electronic device through software, hardware, or a combination of the two. As shown in FIG. 3 , the device for generating road guidance diagrams includes:
第一确定模块301,被配置为确定出度路段目标车道和入度路段目标车道;The first determining
第二确定模块302,被配置为根据所述出度路段目标车道与入度路段目标车道之间的位置关系确定道路引导类型;The
获取模块303,被配置为根据所述道路引导类型,获取道路引导图示生成参数;an obtaining
生成模块304,被配置为根据所述道路引导图示生成参数,生成道路引导图示。The
上文提及,随着社会的发展和进步,道路上的车辆越来越多,路况也越来越复杂,因此很多用户的出行都依赖于导航路线的指引。在导航指引时,对于车辆在路口的转弯动作通常使用具有转弯形态的箭头来进行引导,现有技术中通常使用传统二阶贝塞尔曲线绘制方法来绘制引导箭头,比如引导箭头的转弯处使用二阶贝塞尔曲线插值算法和高斯平滑来绘制,但二阶贝塞尔曲线插值算法的插入点依赖于路口的出度路段和入度路段的出入度角度,以及出度路段的末端坐标和入度路段的起始坐标,对于同一出入度角度,若坐标点位置不同,则插入的点将会完全不同,这将会导致同一出入度角度对应的引导箭头存在较大的差异。由上可知,传统二阶贝塞尔曲线绘制方法得到的引导箭头的转弯形态不规则、可控性差、难以约束,进而降低了用户的使用体验。As mentioned above, with the development and progress of society, there are more and more vehicles on the road, and the road conditions are becoming more and more complicated. Therefore, many users rely on the guidance of navigation routes for their travel. During navigation guidance, arrows with a turning shape are usually used to guide the turning actions of vehicles at intersections. In the prior art, the traditional second-order Bezier curve drawing method is usually used to draw the guiding arrows, such as the turning of the guiding arrows. The second-order Bezier curve interpolation algorithm and Gaussian smoothing are used to draw, but the insertion point of the second-order Bezier curve interpolation algorithm depends on the out-degree segment of the intersection and the in-degree angle of the in-degree segment, as well as the end coordinates of the out-degree segment and For the starting coordinates of the in-degree road section, for the same in-degree angle, if the coordinate point positions are different, the inserted points will be completely different, which will lead to a large difference in the guide arrows corresponding to the same in-degree angle. It can be seen from the above that the turning shape of the guide arrow obtained by the traditional second-order Bezier curve drawing method is irregular, the controllability is poor, and it is difficult to constrain, thereby reducing the user experience.
考虑到上述问题,在该实施方式中,提出一种道路引导图示生成装置,该装置通过确定道路引导类型来获取不同的道路引导图示生成参数,再根据道路引导图示生成参数生成相应的绘制道路引导图示。该技术方案对于不同道路引导类型采取不同绘制道路引导图示生成策略,使得道路引导图示的转折弧度可控制且与道路引导类型相对应,避免出现同一出入度角度对应的道路引导图示存在较大的差异的情况,从而提升了用户的使用体验。Considering the above problems, in this embodiment, a road guidance icon generation device is proposed. The device obtains different road guidance icon generation parameters by determining the road guidance type, and then generates corresponding road guidance icon generation parameters according to the road guidance icon generation parameters. Draw road guidance icons. The technical solution adopts different drawing road guidance icon generation strategies for different road guidance types, so that the turning arc of the road guidance icon can be controlled and corresponds to the road guidance type, avoiding the occurrence of road guidance icons corresponding to the same entry and exit angle. In the case of large differences, the user experience is improved.
在本公开一实施方式中,所述道路引导图示生成装置可实现为可执行道路引导图示生成的终端计算机、计算设备、电子设备、服务器、服务集群等。In an embodiment of the present disclosure, the apparatus for generating a road guidance illustration may be implemented as a terminal computer, a computing device, an electronic device, a server, a service cluster, etc., which can execute the generation of a road guidance illustration.
上述装置实施例所涉及的技术特征及其对应的解释和说明与上文所描述的方法实施例所涉及的技术特征及其对应的解释和说明相同、相应或相似,对于上述装置实施例所涉及的技术特征及其对应的解释和说明可参考上述方法实施例所涉及的技术特征及其对应的解释和说明,本公开在此不再赘述。The technical features involved in the above device embodiments and their corresponding explanations and descriptions are the same, corresponding or similar to the technical features involved in the method embodiments described above and their corresponding explanations and descriptions. Reference may be made to the technical features involved in the above method embodiments and their corresponding explanations and descriptions, which will not be repeated in the present disclosure.
本公开实施例还公开了一种导航服务,其中,基于上述的道路引导图示生成方法,生成被导航对象的道路引导图示,并基于所述道路引导图示为所述被导航对象提供相应场景的导航引导服务。其中,所述相应场景为AR导航或者高架导航或者主辅路导航中的一种或多种的组合。An embodiment of the present disclosure further discloses a navigation service, wherein, based on the above-mentioned method for generating a road guidance icon, a road guidance icon of a navigated object is generated, and based on the road guidance icon, a corresponding road guidance icon is provided for the navigated object. The navigation guidance service for the scene. Wherein, the corresponding scene is a combination of one or more of AR navigation, overhead navigation, or main and auxiliary road navigation.
本公开实施例还公开了一种导航方法,其中,获取至少基于起点、终点及路线规划数据的导航路线,基于所述导航路线进行导航引导,所述路线规划数据包括上述任意一项方法生成的道路引导图示。The embodiment of the present disclosure further discloses a navigation method, wherein a navigation route based on at least a starting point, an end point and route planning data is obtained, and navigation guidance is performed based on the navigation route, and the route planning data includes the route planning data generated by any of the above methods. Road guidance icon.
本公开实施例还公开了一种电子设备,所述电子设备包括存储器和处理器;其中,The embodiment of the present disclosure also discloses an electronic device, the electronic device includes a memory and a processor; wherein,
所述存储器用于存储一条或多条计算机指令,其中,所述一条或多条计算机指令被所述处理器执行以实现上述任一方法步骤。The memory is used to store one or more computer instructions, wherein the one or more computer instructions are executed by the processor to implement any of the above method steps.
图4是适于用来实现根据本公开一实施方式的道路引导图示生成方法的计算机系统的结构示意图。FIG. 4 is a schematic structural diagram of a computer system suitable for implementing a method for generating a road guidance illustration according to an embodiment of the present disclosure.
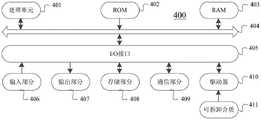
如图4所示,计算机系统400包括处理单元401,其可以根据存储在只读存储器(ROM)402中的程序或者从存储部分408加载到随机访问存储器(RAM)403中的程序而执行上述实施方式中的各种处理。在RAM403中,还存储有计算机系统400操作所需的各种程序和数据。处理单元401、ROM402以及RAM403通过总线404彼此相连。输入/输出(I/O)接口405也连接至总线404。As shown in FIG. 4, a
以下部件连接至I/O接口405:包括键盘、鼠标等的输入部分406;包括诸如阴极射线管(CRT)、液晶显示器(LCD)等以及扬声器等的输出部分407;包括硬盘等的存储部分408;以及包括诸如LAN卡、调制解调器等的网络接口卡的通信部分409。通信部分409经由诸如因特网的网络执行通信处理。驱动器410也根据需要连接至I/O接口405。可拆卸介质411,诸如磁盘、光盘、磁光盘、半导体存储器等等,根据需要安装在驱动器410上,以便于从其上读出的计算机程序根据需要被安装入存储部分408。其中,所述处理单元401可实现为CPU、GPU、TPU、FPGA、NPU等处理单元。The following components are connected to the I/O interface 405: an
特别地,根据本公开的实施方式,上文描述的方法可以被实现为计算机软件程序。例如,本公开的实施方式包括一种计算机程序产品,其包括有形地包含在及其可读介质上的计算机程序,所述计算机程序包含用于执行所述数据检查方法的程序代码。在这样的实施方式中,该计算机程序可以通过通信部分409从网络上被下载和安装,和/或从可拆卸介质411被安装。In particular, according to embodiments of the present disclosure, the methods described above may be implemented as computer software programs. For example, embodiments of the present disclosure include a computer program product comprising a computer program tangibly embodied on a readable medium thereof, the computer program containing program code for performing the data inspection method. In such an embodiment, the computer program may be downloaded and installed from the network via the
附图中的流程图和框图,图示了按照本公开各种实施方式的系统、方法和计算机程序产品的可能实现的体系架构、功能和操作。在这点上,路程图或框图中的每个方框可以代表一个模块、程序段或代码的一部分,所述模块、程序段或代码的一部分包含一个或多个用于实现规定的逻辑功能的可执行指令。也应当注意,在有些作为替换的实现中,方框中所标注的功能也可以以不同于附图中所标注的顺序发生。例如,两个接连地表示的方框实际上可以基本并行地执行,它们有时也可以按相反的顺序执行,这依所涉及的功能而定。也要注意的是,框图和/或流程图中的每个方框、以及框图和/或流程图中的方框的组合,可以用执行规定的功能或操作的专用的基于硬件的系统来实现,或者可以用专用硬件与计算机指令的组合来实现。The flowchart and block diagrams in the Figures illustrate the architecture, functionality, and operation of possible implementations of systems, methods and computer program products according to various embodiments of the present disclosure. In this regard, each block in the diagram or block diagram may represent a module, segment, or portion of code that contains one or more functions for implementing the specified logical function. executable instructions. It should also be noted that, in some alternative implementations, the functions noted in the blocks may occur out of the order noted in the figures. For example, two blocks shown in succession may, in fact, be executed substantially concurrently, or the blocks may sometimes be executed in the reverse order, depending upon the functionality involved. It is also noted that each block of the block diagrams and/or flowchart illustrations, and combinations of blocks in the block diagrams and/or flowchart illustrations, can be implemented in dedicated hardware-based systems that perform the specified functions or operations , or can be implemented in a combination of dedicated hardware and computer instructions.
描述于本公开实施方式中所涉及到的单元或模块可以通过软件的方式实现,也可以通过硬件的方式来实现。所描述的单元或模块也可以设置在处理器中,这些单元或模块的名称在某种情况下并不构成对该单元或模块本身的限定。The units or modules involved in the embodiments of the present disclosure can be implemented in software or hardware. The described units or modules may also be provided in the processor, and the names of these units or modules do not constitute a limitation on the units or modules themselves in certain circumstances.
作为另一方面,本公开实施例还提供了一种计算机可读存储介质,该计算机可读存储介质可以是上述实施方式中所述装置中所包含的计算机可读存储介质;也可以是单独存在,未装配入设备中的计算机可读存储介质。计算机可读存储介质存储有一个或者一个以上程序,所述程序被一个或者一个以上的处理器用来执行描述于本公开实施例的方法。As another aspect, an embodiment of the present disclosure further provides a computer-readable storage medium, and the computer-readable storage medium may be a computer-readable storage medium included in the apparatus described in the foregoing embodiments; it may also exist independently , a computer-readable storage medium that does not fit into a device. The computer-readable storage medium stores one or more programs used by one or more processors to perform the methods described in the embodiments of the present disclosure.
以上描述仅为本公开的较佳实施例以及对所运用技术原理的说明。本领域技术人员应当理解,本公开实施例中所涉及的发明范围,并不限于上述技术特征的特定组合而成的技术方案,同时也应涵盖在不脱离所述发明构思的情况下,由上述技术特征或其等同特征进行任意组合而形成的其它技术方案。例如上述特征与本公开实施例中公开的(但不限于)具有类似功能的技术特征进行互相替换而形成的技术方案。The above description is merely a preferred embodiment of the present disclosure and an illustration of the technical principles employed. Those skilled in the art should understand that the scope of the invention involved in the embodiments of the present disclosure is not limited to the technical solution formed by the specific combination of the above-mentioned technical features, and should also cover the above-mentioned technical solutions without departing from the inventive concept. Other technical solutions formed by any combination of technical features or their equivalent features. For example, a technical solution is formed by replacing the above features with the technical features disclosed in the embodiments of the present disclosure (but not limited to) having similar functions.
Claims (13)
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202210118420.4A CN114812597A (en) | 2022-02-08 | 2022-02-08 | Road guide graphic generation method and device, navigation method and readable storage medium |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202210118420.4A CN114812597A (en) | 2022-02-08 | 2022-02-08 | Road guide graphic generation method and device, navigation method and readable storage medium |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN114812597A true CN114812597A (en) | 2022-07-29 |
Family
ID=82527398
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202210118420.4A Pending CN114812597A (en) | 2022-02-08 | 2022-02-08 | Road guide graphic generation method and device, navigation method and readable storage medium |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN114812597A (en) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN115717899A (en) * | 2022-11-25 | 2023-02-28 | 北京斯年智驾科技有限公司 | Curve path selection method and device |
| CN118816907A (en) * | 2024-04-29 | 2024-10-22 | 中移(上海)信息通信科技有限公司 | Lane line processing method, device, electronic device, computer readable storage medium and computer program product |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB374930A (en) * | 1931-03-16 | 1932-06-16 | Rheinische Metallw & Maschf | An improved aiming device, more particularly for anti-aircraft guns |
| JPH09269997A (en) * | 1996-03-29 | 1997-10-14 | Mitsubishi Electric Corp | Road map creation device, road map display device, airport surface map creation device, airport surface map display device, road map creation method, road map display method, airport surface map creation method, and airport surface map display method |
| US6226573B1 (en) * | 1995-08-01 | 2001-05-01 | Komatsu Ltd. | Course generator of moving body |
| US20140249748A1 (en) * | 2013-03-04 | 2014-09-04 | Harman Becker Automotive Systems Gmbh | Route guidance at intersections |
| CN205340083U (en) * | 2016-01-18 | 2016-06-29 | 李智 | Billiard ball aim auxiliary equipment |
| CN113899380A (en) * | 2021-09-29 | 2022-01-07 | 北京百度网讯科技有限公司 | Intersection turning reminding method and device, electronic equipment and storage medium |
| CN113899384A (en) * | 2021-12-09 | 2022-01-07 | 腾讯科技(深圳)有限公司 | Method, device, apparatus, medium, and program for displaying intersection surface of lane-level road |
-
2022
- 2022-02-08 CN CN202210118420.4A patent/CN114812597A/en active Pending
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB374930A (en) * | 1931-03-16 | 1932-06-16 | Rheinische Metallw & Maschf | An improved aiming device, more particularly for anti-aircraft guns |
| US6226573B1 (en) * | 1995-08-01 | 2001-05-01 | Komatsu Ltd. | Course generator of moving body |
| JPH09269997A (en) * | 1996-03-29 | 1997-10-14 | Mitsubishi Electric Corp | Road map creation device, road map display device, airport surface map creation device, airport surface map display device, road map creation method, road map display method, airport surface map creation method, and airport surface map display method |
| US20140249748A1 (en) * | 2013-03-04 | 2014-09-04 | Harman Becker Automotive Systems Gmbh | Route guidance at intersections |
| CN205340083U (en) * | 2016-01-18 | 2016-06-29 | 李智 | Billiard ball aim auxiliary equipment |
| CN113899380A (en) * | 2021-09-29 | 2022-01-07 | 北京百度网讯科技有限公司 | Intersection turning reminding method and device, electronic equipment and storage medium |
| CN113899384A (en) * | 2021-12-09 | 2022-01-07 | 腾讯科技(深圳)有限公司 | Method, device, apparatus, medium, and program for displaying intersection surface of lane-level road |
Non-Patent Citations (2)
| Title |
|---|
| 交通运输部,郭腾峰: "公路路线设计规范", 28 September 2017 * |
| 住房城乡建设部: "道路交通标志和标线", 27 January 2018 * |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN115717899A (en) * | 2022-11-25 | 2023-02-28 | 北京斯年智驾科技有限公司 | Curve path selection method and device |
| CN115717899B (en) * | 2022-11-25 | 2024-04-30 | 北京斯年智驾科技有限公司 | Curve path selection method and device |
| CN118816907A (en) * | 2024-04-29 | 2024-10-22 | 中移(上海)信息通信科技有限公司 | Lane line processing method, device, electronic device, computer readable storage medium and computer program product |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102559269B1 (en) | Real-scene navigation icon display method, device, equipment and medium | |
| US9830064B2 (en) | Rendering map images using modifications of non-raster map data | |
| US8937627B1 (en) | Seamless vector map tiles across multiple zoom levels | |
| CN113223113B (en) | Lane line processing method and device, electronic equipment and cloud control platform | |
| CN114812597A (en) | Road guide graphic generation method and device, navigation method and readable storage medium | |
| CN113538622B (en) | An intersection drawing method, device, equipment and storage medium | |
| CN112051864B (en) | Method, apparatus, device and readable medium for tracking moving target trajectory | |
| JP7425169B2 (en) | Image processing method, device, electronic device, storage medium and computer program | |
| CN109544658B (en) | Map rendering method and device, storage medium and electronic device | |
| EP4040113A2 (en) | Method and apparatus for road guidance, and electronic device | |
| CN107941226B (en) | Method and device for generating a direction guideline for a vehicle | |
| CN114838737B (en) | Method and device for determining driving path, electronic equipment and storage medium | |
| EP4261644B1 (en) | Unmanned vehicle path optimization method and related device | |
| CN113205570B (en) | Electronic map-based electronic zebra crossing generation method and device | |
| CN114445598A (en) | Display data processing method and system, storage medium and electronic equipment | |
| CN114882141B (en) | zebra crossing drawing methods, devices, electronic equipment and computer program products | |
| AU2009202878B2 (en) | A line stroking method and system | |
| CN113804208B (en) | Unmanned vehicle path optimization method and related equipment | |
| CN114754762A (en) | Map processing method and device | |
| CN112697163A (en) | Method and device for determining induced steering, electronic equipment and storage medium | |
| CN113581205B (en) | Method and device for adjusting vehicle posture | |
| CN114723864B (en) | Arc rendering method with width and computer program product | |
| CN115824239A (en) | Recommended lane determination method, device, electronic device and computer program product | |
| JP2003281555A (en) | Graphic drawing device | |
| CN110389349B (en) | Positioning method and device |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination |