CN111837163A - System and method for vehicle wheel detection - Google Patents
System and method for vehicle wheel detection Download PDFInfo
- Publication number
- CN111837163A CN111837163A CN201980017911.6A CN201980017911A CN111837163A CN 111837163 A CN111837163 A CN 111837163A CN 201980017911 A CN201980017911 A CN 201980017911A CN 111837163 A CN111837163 A CN 111837163A
- Authority
- CN
- China
- Prior art keywords
- image data
- vehicle
- vehicle wheel
- data
- training
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images










Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/56—Context or environment of the image exterior to a vehicle by using sensors mounted on the vehicle
- G06V20/58—Recognition of moving objects or obstacles, e.g. vehicles or pedestrians; Recognition of traffic objects, e.g. traffic signs, traffic lights or roads
-
- G—PHYSICS
- G07—CHECKING-DEVICES
- G07C—TIME OR ATTENDANCE REGISTERS; REGISTERING OR INDICATING THE WORKING OF MACHINES; GENERATING RANDOM NUMBERS; VOTING OR LOTTERY APPARATUS; ARRANGEMENTS, SYSTEMS OR APPARATUS FOR CHECKING NOT PROVIDED FOR ELSEWHERE
- G07C5/00—Registering or indicating the working of vehicles
- G07C5/08—Registering or indicating performance data other than driving, working, idle, or waiting time, with or without registering driving, working, idle or waiting time
- G07C5/0808—Diagnosing performance data
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F18/00—Pattern recognition
- G06F18/20—Analysing
- G06F18/24—Classification techniques
- G06F18/241—Classification techniques relating to the classification model, e.g. parametric or non-parametric approaches
- G06F18/2413—Classification techniques relating to the classification model, e.g. parametric or non-parametric approaches based on distances to training or reference patterns
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N3/00—Computing arrangements based on biological models
- G06N3/02—Neural networks
- G06N3/04—Architecture, e.g. interconnection topology
- G06N3/045—Combinations of networks
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N3/00—Computing arrangements based on biological models
- G06N3/02—Neural networks
- G06N3/04—Architecture, e.g. interconnection topology
- G06N3/0464—Convolutional networks [CNN, ConvNet]
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N3/00—Computing arrangements based on biological models
- G06N3/02—Neural networks
- G06N3/08—Learning methods
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N3/00—Computing arrangements based on biological models
- G06N3/02—Neural networks
- G06N3/08—Learning methods
- G06N3/09—Supervised learning
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/20—Image preprocessing
- G06V10/26—Segmentation of patterns in the image field; Cutting or merging of image elements to establish the pattern region, e.g. clustering-based techniques; Detection of occlusion
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/40—Extraction of image or video features
- G06V10/44—Local feature extraction by analysis of parts of the pattern, e.g. by detecting edges, contours, loops, corners, strokes or intersections; Connectivity analysis, e.g. of connected components
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/70—Arrangements for image or video recognition or understanding using pattern recognition or machine learning
- G06V10/764—Arrangements for image or video recognition or understanding using pattern recognition or machine learning using classification, e.g. of video objects
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/70—Arrangements for image or video recognition or understanding using pattern recognition or machine learning
- G06V10/82—Arrangements for image or video recognition or understanding using pattern recognition or machine learning using neural networks
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/56—Context or environment of the image exterior to a vehicle by using sensors mounted on the vehicle
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/70—Labelling scene content, e.g. deriving syntactic or semantic representations
Landscapes
- Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Evolutionary Computation (AREA)
- Multimedia (AREA)
- Artificial Intelligence (AREA)
- Software Systems (AREA)
- Computing Systems (AREA)
- General Health & Medical Sciences (AREA)
- Health & Medical Sciences (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Computational Linguistics (AREA)
- Data Mining & Analysis (AREA)
- General Engineering & Computer Science (AREA)
- Life Sciences & Earth Sciences (AREA)
- Mathematical Physics (AREA)
- Molecular Biology (AREA)
- Biophysics (AREA)
- Biomedical Technology (AREA)
- Medical Informatics (AREA)
- Databases & Information Systems (AREA)
- Evolutionary Biology (AREA)
- Bioinformatics & Computational Biology (AREA)
- Bioinformatics & Cheminformatics (AREA)
- Traffic Control Systems (AREA)
- Image Analysis (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
Abstract
Description
优先权专利申请priority patent application
本文要求2018年3月9日提交的、标题为“SYSTEM AND METHOD FOR VEHICLE WHEELDETECTION”的美国非临时专利申请第15/917,331序列号的优先权,其通过引用的方式全部并入本文。本文要求2017年3月10日提交的、标题为“SYSTEM AND METHOD FOR SEMANTICSEGMENTATION USING DENSE UPSAMPLING CONVOLUTION(DUC)”的美国非临时专利申请第15/456,219序列号的优先权,其通过引用的方式全部并入本文。本文要求2017年3月10日提交的、标题为“SYSTEM AND METHOD FOR SEMANTIC SEGMENTATION USING HYBRID DILATEDCONVOLUTION(HDC)”的美国非临时专利申请第15/456,294序列号的优先权,其通过引用的方式全部并入本文。所引用的专利申请的公开内容被认为是本申请的公开内容的一部分,并且通过引用的方式全部并入本文。This document claims priority to US Non-Provisional Patent Application Serial No. 15/917,331, filed March 9, 2018, entitled "SYSTEM AND METHOD FOR VEHICLE WHEELDETECTION," which is incorporated herein by reference in its entirety. This article claims priority to US Non-Provisional Patent Application Serial No. 15/456,219, filed March 10, 2017, entitled "SYSTEM AND METHOD FOR SEMANTICSEGMENTATION USING DENSE UPSAMPLING CONVOLUTION (DUC)," which is incorporated by reference in its entirety. into this article. This article claims priority to US Non-Provisional Patent Application Serial No. 15/456,294, filed March 10, 2017, entitled "SYSTEM AND METHOD FOR SEMANTIC SEGMENTATION USING HYBRID DILATED CONVOLUTION (HDC)", which is incorporated by reference in its entirety. into this article. The disclosures of the cited patent applications are considered part of the disclosure of this application and are incorporated herein by reference in their entirety.
技术领域technical field
本专利文件总体上涉及用于图像处理、车辆控制系统和自主驾驶系统的工具(系统、装置、方法、计算机程序产品等),并且更具体地但非限制涉及一种用于车辆车轮检测的系统和方法。This patent document relates generally to tools (systems, apparatus, methods, computer program products, etc.) for image processing, vehicle control systems, and autonomous driving systems, and more particularly, but not by way of limitation, to a system for vehicle wheel detection and method.
背景技术Background technique
在自主驾驶系统中,成功地对周围驾驶环境和交通参与者进行感知和预测,这对针对控制自主车辆或托管车辆做出正确和安全的决定至关重要。在视觉感知的现有文献和申请中,已经广泛研究和使用了诸如对象识别、二维(2D)对象检测和2D场景理解(或语义分割)等技术。借助于快速发展的深度学习技术和计算能力(诸如图形处理单元[GPU]),已经成功地将这些视觉感知技术应用于与自主车辆或托管车辆一起使用。然而,与这些2D感知方法相比较,对全三维(3D)感知技术的研究较少,因为难以获得可靠的地面实况数据以及难以正确地训练3D模型。例如,正确地对用于3D对象检测的3D边界框进行注释,需要准确地测量非固有的和固有的摄像头参数以及自主车辆或托管车辆的运动,这通常很难或不可能实现。即使可以获得地面实况数据,3D模型也难以训练,因为训练数据的量有限并且测量值不准确。因此,在这些视觉感知应用中,已经使用了没那么昂贵并且性能较差的备选解决方案。In autonomous driving systems, the successful perception and prediction of the surrounding driving environment and traffic participants is critical to making correct and safe decisions regarding control of autonomous or managed vehicles. In the existing literature and applications in visual perception, techniques such as object recognition, two-dimensional (2D) object detection, and 2D scene understanding (or semantic segmentation) have been extensively studied and used. These visual perception techniques have been successfully applied for use with autonomous or managed vehicles with the help of rapidly advancing deep learning techniques and computing power, such as graphics processing units [GPUs]. However, compared to these 2D perception methods, less research has been done on full three-dimensional (3D) perception techniques because of the difficulty in obtaining reliable ground-truth data and the difficulty in properly training 3D models. For example, correctly annotating 3D bounding boxes for 3D object detection requires accurate measurement of extrinsic and intrinsic camera parameters and motion of autonomous or managed vehicles, which is often difficult or impossible to achieve. Even if ground truth data is available, 3D models are difficult to train because the amount of training data is limited and measurements are inaccurate. Therefore, in these visual perception applications, less expensive and less performant alternative solutions have been used.
因此,用于检测并且分析车辆车轮的高效系统是必要的。Therefore, an efficient system for detecting and analyzing vehicle wheels is necessary.
发明内容SUMMARY OF THE INVENTION
车辆车轮是用于确定移动车辆的确切位置和姿势的重要特征。车辆姿势可以包括车辆前进方向、定向、速度、加速度等。然而,在计算机视觉和自主驾驶的现有文献和申请中,通常忽视了将车辆车轮特征用于车辆控制。在本文所公开的各种示例实施例中,提供了一种用于使用图像分割的车辆车轮检测的系统和方法。在示例实施例中,该系统包括三个组成部分:1)数据收集和注释、2)使用深度卷积神经网络的模型训练以及3)实时模型推理。为了利用最新的深度学习模型和训练策略,本文所公开的各种示例实施例将车轮检测问题形成为两类分割任务,并且在擅长多类语义分割问题的深度神经网络上进行训练。测试结果表明:本文所公开的系统可以在复杂的驾驶场景下实时成功地检测车辆车轮特征。本文所公开的各种示例实施例可以被用于各种应用,诸如3D车辆姿势估计和车辆车道距离估计等。Vehicle wheels are important features for determining the exact position and attitude of a moving vehicle. Vehicle posture may include vehicle heading, orientation, speed, acceleration, and the like. However, the use of vehicle wheel features for vehicle control is often overlooked in existing literature and applications in computer vision and autonomous driving. In various example embodiments disclosed herein, a system and method for vehicle wheel detection using image segmentation is provided. In an example embodiment, the system includes three components: 1) data collection and annotation, 2) model training using deep convolutional neural networks, and 3) real-time model inference. To take advantage of state-of-the-art deep learning models and training strategies, the various example embodiments disclosed herein formulate the wheel detection problem as a two-class segmentation task and train on deep neural networks that excel at multi-class semantic segmentation problems. Test results show that the system disclosed in this paper can successfully detect vehicle wheel features in real-time in complex driving scenarios. The various example embodiments disclosed herein may be used in various applications such as 3D vehicle pose estimation and vehicle lane distance estimation, among others.
由于至少如下三个原因,车辆车轮可以被用于车辆特征分析:1)对其他交通参与者的感知和预测主要关于其他交通参与者在路面上的轨迹,其中车轮可以提供最佳的测量,因为它们是最接近路面的车辆部件;2)车轮可以提供对车辆姿势的可靠估计,因为车辆通常具有四个或更多个车轮作为参考点;3)从概念上讲,车轮易于进行检测,因为其在车辆中的形状和位置是统一的。当我们获得对给定车辆的准确的车轮特征分割分析时,我们可以获得或推理出有价值的车辆信息,诸如姿势、位置、意图和轨迹。该车辆信息可以为用于自主驾驶的感知、定位和计划系统提供很大益处。Vehicle wheels can be used for vehicle characterization for at least three reasons: 1) Perceptions and predictions of other traffic participants are primarily about their trajectories on the road surface, where wheels can provide the best measure because They are the parts of the vehicle that are closest to the road surface; 2) the wheels can provide a reliable estimate of the vehicle's pose, since vehicles typically have four or more wheels as reference points; 3) the wheels are conceptually easy to detect because of their The shape and position in the vehicle are uniform. When we obtain accurate segmentation analysis of wheel features for a given vehicle, we can obtain or infer valuable vehicle information such as pose, position, intent, and trajectory. This vehicle information can provide great benefits to perception, localization, and planning systems for autonomous driving.
在一个示例方面中,一种系统包括:数据处理器;以及自主车辆车轮检测系统,可由数据处理器执行,自主车辆车轮检测系统被配置为执行自主车辆车轮检测操作。该自主车辆车轮检测操作被配置为:从训练图像数据收集系统接收训练图像数据;获得与训练图像数据对应的地面实况数据;执行训练阶段,以训练一个或多个分类器来处理训练图像数据中的图像,以在训练图像数据中的图像中检测车辆车轮对象;从与自主车辆相关联的图像数据收集系统接收操作图像数据;并且执行操作阶段,该操作阶段包括将训练过的一个或多个分类器应用于提取车轮对象数据。In one example aspect, a system includes: a data processor; and an autonomous vehicle wheel detection system executable by the data processor, the autonomous vehicle wheel detection system configured to perform autonomous vehicle wheel detection operations. The autonomous vehicle wheel detection operation is configured to: receive training image data from a training image data collection system; obtain ground truth data corresponding to the training image data; perform a training phase to train one or more classifiers to process the data in the training image data to detect vehicle wheel objects in the images in the training image data; receive operational image data from an image data collection system associated with the autonomous vehicle; and perform an operational phase that includes one or more of the trained A classifier is applied to extract wheel object data.
在另一方面中,公开了一种方法,该方法用于:获得与训练图像数据对应的地面实况数据;执行训练阶段,以训练一个或多个分类器来处理训练图像数据中的图像,以在训练图像数据中的图像中检测车辆车轮对象;从与自主车辆相关联的图像数据收集系统接收操作图像数据;以及执行操作阶段,该操作阶段包括将训练过的一个或多个分类器应用于从操作图像数据提取车辆车轮对象,并且产生车辆车轮对象数据。In another aspect, a method is disclosed for: obtaining ground truth data corresponding to training image data; performing a training phase to train one or more classifiers to process images in the training image data to detecting vehicle wheel objects in images in the training image data; receiving operational image data from an image data collection system associated with the autonomous vehicle; and performing an operational phase that includes applying the trained one or more classifiers to Vehicle wheel objects are extracted from the operation image data, and vehicle wheel object data is generated.
在另一方面中,一种非暂时性机器可用存储介质采用指令,这些指令在由机器执行时使机器:从训练图像数据收集系统接收训练图像数据;获得与训练图像数据对应的地面实况数据;执行训练阶段,以训练一个或多个分类器来处理训练图像数据中的图像,以在训练图像数据中的图像中检测车辆车轮对象;从与自主车辆相关联的图像数据收集系统接收操作图像数据;并且执行操作阶段,该操作阶段包括将训练过的一个或多个分类器应用于从操作图像数据提取车辆车轮对象,并且产生车辆车轮对象数据。In another aspect, a non-transitory machine may employ a storage medium with instructions that, when executed by the machine, cause the machine to: receive training image data from a training image data collection system; obtain ground truth data corresponding to the training image data; performing a training phase to train one or more classifiers to process images in the training image data to detect vehicle wheel objects in the images in the training image data; receiving operational image data from an image data collection system associated with the autonomous vehicle and performing an operational phase comprising applying the trained one or more classifiers to extract vehicle wheel objects from operational image data and generating vehicle wheel object data.
在本文中公开了这些方面以及其他方面。These and other aspects are disclosed herein.
附图说明Description of drawings
在附图的图中,通过示例的方式而不是通过限制的方式图示了各种实施例,其中:In the figures of the accompanying drawings, various embodiments are illustrated by way of example and not by way of limitation, wherein:
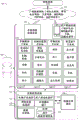
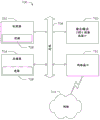
图1图示了可以实施示例实施例的车载图像处理模块的示例生态系统的框图;1 illustrates a block diagram of an example ecosystem in which an in-vehicle image processing module of an example embodiment may be implemented;
图2图示了从摄像头获取的图像(上半部图像)及其对应的车轮注释结果(下半部图像);Figure 2 illustrates the image acquired from the camera (upper image) and its corresponding wheel annotation results (lower image);
图3图示了示例实施例中被用于配置或训练自主车辆车轮检测系统以及其中的分类器的离线训练阶段(第一阶段);FIG. 3 illustrates an offline training phase (first phase) used to configure or train an autonomous vehicle wheel detection system and a classifier therein in an example embodiment;
图4(下半部图像)图示了根据示例实施例的可以被用于训练分割模型的示例地面实况标签图;图4(上半部图像)还图示了原始示例图像与地面实况相结合的混合可视化;Figure 4 (bottom half image) illustrates an example ground truth label map that may be used to train a segmentation model according to example embodiments; Figure 4 (top half image) also illustrates the original example image combined with ground truth hybrid visualization;
图5图示了对示例实施例中的自主车辆车轮检测系统的操作使用或模拟使用的第二阶段;5 illustrates a second stage of operational use or simulated use of the autonomous vehicle wheel detection system in an example embodiment;
图6(下半部图像)图示了使用训练过的分割模型的示例预测标签图,利用图4的示例图像以及其他训练图像来训练该分割模型;图6(上半部图像)还图示了原始示例图像与预测结果相结合的混合可视化;Figure 6 (bottom half of the image) illustrates an example predicted label map using the trained segmentation model using the example image of Figure 4 and other training images to train the segmentation model; Figure 6 (top half of the image) also illustrates A hybrid visualization of the original example image combined with the prediction results;
图7(下半部图像)图示了根据示例实施例的可以被用于训练分割模型的另一示例地面实况标签图;图7(上半部图像)还图示了原始示例图像与地面实况相结合的混合可视化;Figure 7 (bottom image) illustrates another example ground truth label map that may be used to train a segmentation model according to an example embodiment; Figure 7 (top image) also illustrates the original example image with ground truth Combined hybrid visualization;
图8(下半部图像)图示了使用训练过的分割模型的示例预测标签图,利用图7的示例图像以及其他训练图像来训练该分割模型;图8(上半部图像)还图示了原始示例图像与预测结果相结合的混合可视化。Figure 8 (bottom half of the image) illustrates an example predicted label map using the trained segmentation model using the example image of Figure 7 as well as other training images; Figure 8 (top half of the image) also illustrates A hybrid visualization of the original example images combined with the predicted results.
图9(下半部图像)图示了根据示例实施例的可以被用于训练分割模型的再一个示例地面实况标签图;图9(上半部图像)还图示了原始示例图像与地面实况相结合的混合可视化;Figure 9 (bottom image) illustrates yet another example ground truth label map that may be used to train a segmentation model according to example embodiments; Figure 9 (top image) also illustrates the original example image with ground truth Combined hybrid visualization;
图10(下半部图像)图示了使用训练过的分割模型的示例预测标签图,利用图9的示例图像以及其他训练图像来训练该分割模型;图10(上半部图像)还图示了原始示例图像与预测结果相结合的混合可视化。Figure 10 (bottom half of the image) illustrates an example predicted label map using a trained segmentation model trained with the example image of Figure 9 and other training images; Figure 10 (top half of the image) also illustrates A hybrid visualization of the original example images combined with the predicted results.
图11是图示了用于车辆车轮检测的系统和方法的示例实施例的过程流程图;以及11 is a process flow diagram illustrating an example embodiment of a system and method for vehicle wheel detection; and
图12以计算机系统的示例形式示出了机器的图示,在该计算机系统内,一组指令在被执行时可以使机器执行本文所讨论的方法中的任何一种或多种方法。12 shows an illustration of a machine in the form of an example of a computer system within which a set of instructions, when executed, can cause the machine to perform any one or more of the methods discussed herein.
在可能的情况下,已经使用相同的附图标记来表示图中共有的相同要素。可以预期的是,在一种实施方式中公开的要素可以在没有具体叙述的情况下有益地用于其他实施方式中。Where possible, the same reference numbers have been used to refer to the same elements that are common to the figures. It is contemplated that elements disclosed in one embodiment can be used to advantage in other embodiments without specific recitation.
具体实施方式Detailed ways
在下面的描述中,为了进行解释,阐述了许多具体细节以提供对各个实施例的透彻理解。应该理解:在不偏离所公开的主题的范围的情况下,可以利用其他实施例,并且可以进行结构改变。预期以下特征和要素的任何组合以实施和实践本公开。In the following description, for purposes of explanation, numerous specific details are set forth in order to provide a thorough understanding of various embodiments. It is to be understood that other embodiments may be utilized and structural changes may be made without departing from the scope of the disclosed subject matter. Any combination of the following features and elements is contemplated to implement and practice the present disclosure.
在本说明书中,共同的或相似的特征可以由共同的附图标记表示。如本文使用的,“示例性”可以指示示例、实施方式或方面,并且不应该被解释为限制或指示首选项或优选实施方式。In this specification, common or similar features may be denoted by common reference numerals. As used herein, "exemplary" may indicate an example, implementation, or aspect, and should not be construed as limiting or indicating a preference or preferred implementation.
当前,自主车辆面临若干技术限制,这些技术限制阻碍其与现实世界的交互和适应性。Currently, autonomous vehicles face several technical limitations that hinder their interaction and adaptability with the real world.
当前的自主车辆技术通常是反应性的——也就是说,决策是基于当前的状况或状态。例如,自主车辆可以被编程为在道路中间检测到物体时紧急停止。然而,当前的自主车辆技术具有有限的能力来确定从后面被撞的可能性或由于快速制动而引起公路上连环相撞的可能性。Current autonomous vehicle technology is often reactive—that is, decisions are based on current conditions or states. For example, autonomous vehicles can be programmed to make an emergency stop when an object is detected in the middle of the road. However, current autonomous vehicle technology has a limited ability to determine the likelihood of being hit from behind or the likelihood of a chain collision on the highway due to rapid braking.
此外,当前的技术不知道如何进行现实世界的判断调用。道路上的各种物体需要基于环境和当前状况的不同判断。例如,转弯避开纸板箱对自主车辆和其他驾驶员引起不必要的危险。另一方面,转弯对于避免撞到道路中间的人来说是必须的。判断调用根据道路状况、其他车辆的轨迹、自主车辆的速度以及其他车辆的速度和车辆方向发生改变。Furthermore, current technology does not know how to make real-world judgment calls. Various objects on the road require different judgments based on the environment and current conditions. For example, turning to avoid a cardboard box poses an unnecessary danger to autonomous vehicles and other drivers. Turning, on the other hand, is a must to avoid hitting someone in the middle of the road. The judgment call changes based on road conditions, the trajectory of other vehicles, the speed of the ego vehicle, and the speed and direction of the other vehicles.
附加地,当前技术不适合于具有其他人类驾驶员的环境。当对交通模式的变化做出反应时,自主车辆必须能够对其他驾驶员或行人的行为进行预测。在现实生活中接受自主车辆的一个目标是:按照允许与其他人类驾驶员和车辆的适当交互的方式来表现。人类驾驶员通常基于可预测的人类反应来做出交通决策,这些可预测的人类反应不一定有利于机器规则。换句话说,自主车辆存在以下技术问题:当前的自主车辆行为太像机器。这种行为可能导致事故,因为其他驾驶员无法预料自主车辆所执行的某些动作。Additionally, current technology is not suitable for environments with other human drivers. When reacting to changes in traffic patterns, autonomous vehicles must be able to predict the behavior of other drivers or pedestrians. One goal of accepting autonomous vehicles in real life is to behave in a way that allows for appropriate interaction with other human drivers and vehicles. Human drivers typically make traffic decisions based on predictable human responses that do not necessarily favor machine rules. In other words, there is a technical problem with autonomous vehicles: current autonomous vehicles behave too much like machines. This behavior can lead to accidents because other drivers cannot anticipate certain actions performed by the autonomous vehicle.
除了其他解决方案之外,本文还提供了上述问题的技术解决方案。例如,用于检测并且分析车辆车轮的高效系统被用于产生车辆车轮对象数据,并且车辆车轮基于图像数据收集系统。分析车辆车轮使自我车辆的轨迹决策以及其他自主车辆判断更像人类,从而减少了乘客、周围车辆和行人的问题。因此,除了其他解决方案之外,本公开还提供了作为上述问题的解决方案的一种用于检测并分析车辆车轮的高效系统。In addition to other solutions, this article provides technical solutions to the above problems. For example, efficient systems for detecting and analyzing vehicle wheels are used to generate vehicle wheel object data, and vehicle wheel based image data collection systems. Analyzing vehicle wheels makes ego vehicle trajectory decisions and other autonomous vehicle judgments more human-like, reducing problems for passengers, surrounding vehicles, and pedestrians. Accordingly, the present disclosure provides, among other solutions, an efficient system for detecting and analyzing vehicle wheels as a solution to the above problems.
如在各种示例实施例中描述的,本文描述了用于车辆车轮检测的系统和方法。可以在车辆生态系统101中的车载控制系统150的语境中使用本文公开的示例实施例。在一个示例实施例中,具有驻留在车辆105中的图像处理模块200的车载控制系统150可以被配置为与在图1中所图示的架构和生态系统101一样。然而,对于本领域的普通技术人员而言,将清楚的是:也可以在各种其他应用和系统中实施、配置和使用本文所描述的和要求保护的图像处理模块200。As described in various example embodiments, systems and methods for vehicle wheel detection are described herein. The example embodiments disclosed herein may be used in the context of an in-
现在参照图1,框图图示了可以实施示例实施例中的车载控制系统150和图像处理模块200的示例性生态系统101。下面更详细地描述这些部件。生态系统101包括各种系统和部件,这些系统和部件可以生成和/或传递一个或多个信息源/数据源以及相关服务到车载控制系统150和图像处理模块200,该车载控制系统150和图像处理模块200可以被安装在车辆105中。例如,作为车辆子系统140的设备中的一个设备被安装在车辆105中的摄像头可以生成可由车载控制系统150接收的图像和定时数据。车载控制系统150和在其中执行的图像处理模块200可以接收该图像和定时数据输入。如下面更详细地描述的,图像处理模块200可以处理图像输入并且提取对象特征,这些对象特征可以由自主车辆控制子系统用作车辆子系统140的另一子系统。例如,自主车辆控制子系统可以使用实时提取的对象特征来安全并且高效地导航和控制车辆105通过现实世界驾驶环境,同时避开障碍并且安全地控制该车辆。Referring now to FIG. 1 , a block diagram illustrates an
在本文描述的示例实施例中,车载控制系统150可以与多个车辆子系统140进行数据通信,所有这些车辆子系统140都可以驻留在用户的车辆105中。提供车辆子系统接口141,以促进车载控制系统150与多个车辆子系统140之间的数据通信。车载控制系统150可以被配置为包括数据处理器171以执行图像处理模块200,以便处理从一个或多个车辆子系统140接收到的图像数据。数据处理器171可以与数据存储设备172相结合,该数据存储设备172作为车载控制系统150中的计算系统170的一部分。数据存储设备172可以被用于存储数据、处理参数和数据处理指令。可以提供处理模块接口165,以促进数据处理器171与图像处理模块200之间的数据通信。在各种示例实施例中,可以提供与图像处理模块200类似地配置的多个处理模块以供数据处理器171执行。如通过图1中的虚线示出的,图像处理模块200可以被集成到车载控制系统150中,可选地,被下载到车载控制系统150,或者与车载控制系统150分开部署。In the example embodiments described herein, the
车载控制系统150可以被配置为从与其连接的广域网120和网络资源122接收数据,或者向与其连接的广域网120和网络资源122发送数据。车载网络使能设备130和/或用户移动设备132可以被用于经由网络120来进行通信。网络使能设备131可以由车载控制系统150用来促进经由车载网络使能设备130的在车载控制系统150与网络120之间的数据通信。类似地,用户移动设备接口133可以被车载控制系统150使用,以经由用户移动设备132促进车载控制系统150与网络120之间的数据通信。按照这种方式,车载控制系统150可以经由网络120来获得网络资源122的实时访问权限。网络资源122可以被用于获得要由数据处理器171执行的处理模块、用于训练内部神经网络的数据内容、系统参数或其他数据。The in-
生态系统101可以包括广域数据网络120。该网络120表示一个或多个常规广域数据网络,诸如互联网、蜂窝电话网络、卫星网络、寻呼机网络、无线广播网络、游戏网络、WiFi网络、对等网络、IP语音(VoIP)网络等。这些网络120中的一个或多个网络可以被用于将用户或客户端系统与网络资源122(诸如网站、服务器、中央控制站点等)连接。网络资源122可以生成和/或分布数据,可以经由车载网络使能设备130或用户移动设备132来在车辆105中接收该数据。网络资源122还可以托管网络云服务,该网络云服务可以支持被用于计算或协助处理图像输入或图像输入分析的功能性。天线可以用于经由蜂窝、卫星、无线电或其他常规信号接收机构来将车载控制系统150和图像处理模块200与数据网络120连接。这种蜂窝数据网络是当前可用的(例如VerizonTM、AT&TTM、T-MobileTM等)。这种基于卫星的数据或内容网络当前也是可用的(例如SiriusXMTM、HughesNetTM等)。常规广播网络(诸如AM/FM无线电网络、寻呼机网络、UHF网络、游戏网络、WiFi网络、对等网络、IP语音(VoIP)网络等)也是众所周知的。因此,如下面更详细地描述的,车载控制系统150和图像处理模块200可以经由车载网络使能设备接口131来接收基于网络的数据或内容,该车载网络使能设备接口131可以被用于与车载网络使能设备130和网络120连接。按照这种方式,车载控制系统150和图像处理模块200可以从车辆105内支持各种可联网的车载设备和系统。
如在图1中示出的,车载控制系统150和图像处理模块200还可以从用户移动设备132接收数据、图像处理控制参数和训练内容,这些用户移动设备132可以位于车辆105内部或附近。用户移动设备132可以表示标准的移动设备,诸如蜂窝电话、智能电话、个人数字助理(PDA)、MP3播放器、平板计算设备(例如iPadTM)、膝上型计算机、CD播放器以及可以为车载控制系统150和图像处理模块200产生、接收和/或传递数据、图像处理控制参数和内容的其他移动设备。如在图1中示出的,移动设备132还可以与网络云120进行数据通信。移动设备132可以经由网络120来从移动设备132它们本身的内部存储器部件或从网络资源122获取数据和内容。附加地,移动设备132它们本身可以包括GPS数据接收器、加速度计、WiFi三角测量或移动设备中可以被用于随时确定用户的实时地理位置(经由移动设备)的其他地理位置传感器或部件。在任何情况下,车载控制系统150和图像处理模块200都可以从如在图1中示出的移动设备132接收数据。As shown in FIG. 1 ,
仍然参照图1,生态系统101的示例实施例可以包括车辆操作子系统140。对于在车辆105中实施的实施例,许多标准的车辆包括支持用于发动机、制动器、变速器、电气系统、排放系统、内部环境等的监测/控制子系统的操作子系统(诸如电子控制单元(ECU))。例如,经由车辆子系统接口141从车辆操作子系统140(例如车辆105的ECU)传送给车载控制系统150的数据信号可以包括有关车辆105的一个或多个部件或子系统的状态的信息。具体地,可以从车辆操作子系统140传送给车辆105的控制器局域网(CAN)总线的数据信号可以由车载控制系统150经由车辆子系统接口141接收并且处理。本文所描述的系统和方法的实施例可以与使用如本文定义的CAN总线或相似数据通信总线的基本上任何机械化系统(包括但不限于:工业设备、船、卡车、机械或汽车)一起使用;因此,如本文所使用的术语“车辆”可以包括任何这种机械化系统。本文所描述的系统和方法的实施例还可以与采用某种形式的网络数据通信的任何系统一起使用;然而,不需要这种网络通信。Still referring to FIG. 1 , an example embodiment of the
仍然参照图1,生态系统101的示例实施例以及其中的车辆操作子系统140可以包括支持车辆105的操作的各种车辆子系统。通常,例如,车辆105可以采取小汽车、卡车、摩托车、公共汽车、船、飞机、直升机、割草机、推土机、雪地摩托车、飞行器、休闲车、游乐园车、农场设备、建筑设备、电车、高尔夫球车、火车和手推车的形式。其他车辆也是可能的。车辆105可以被配置为完全或部分地以自主模式进行操作。例如,车辆105可以在自主模式下控制其本身,并且可以可操作以确定车辆的当前状态及其环境,确定环境中的至少一个其他车辆的预测行为,确定可以与该至少一个其他车辆执行预测行为的可能性对应的置信度,并且基于确定的信息来控制车辆105。当处于自主模式时,车辆105可以被配置为在没有人类交互的情况下进行操作。Still referring to FIG. 1 , the example embodiment of the
车辆105可以包括各种车辆子系统,诸如车辆驱动子系统142、车辆传感器子系统144、车辆控制子系统146和乘员接口子系统148。如上所述,车辆105还可以包括车载控制系统150、计算系统170和图像处理模块200。车辆105可以包括更多或更少的子系统,并且每个子系统可以包括多个元件。进一步地,车辆105的每个子系统和元件可以被相互连接。因此,车辆105的所描述的功能中的一个或多个功能可以被划分为附加的功能部件或物理部件,或被组合为更少的功能部件或物理部件。在一些其他示例中,附加的功能部件和物理部件可以被添加到通过图1所图示的示例。车辆驱动子系统142可以包括可操作以为车辆105提供动力运动的部件。在示例实施例中,车辆驱动子系统142可以包括发动机或电动机、车轮/轮胎、变速器、电气子系统和动力源。发动机或电动机可以是内燃发动机、电机、蒸汽发动机、燃料电池发动机、丙烷发动机或其他类型的发动机或电动机的任何组合。在一些示例实施例中,发动机可以被配置为将动力源转换为机械能。在一些示例实施例中,车辆驱动子系统142可以包括多种类型的发动机或电动机。例如,气电混合动力汽车可以包括汽油发动机和电动机。其他示例是可能的。车辆105的车轮可以是标准的轮胎。可以按照各种形式来配置车辆105的车轮,包括:例如单轮车、自行车、三轮车或四轮形式(诸如在小汽车或卡车上)。其他车轮几何形状是可能的,诸如包括六个或更多个车轮的那些车轮几何形状。车辆105的车轮的任何组合都可以可操作以相对于其他车轮不同地旋转。车轮可以表示被固定地附接至变速器的至少一个车轮以及被联接至车轮的轮辋的至少一个轮胎,该轮辋可以接触驱动表面。车轮可以包括金属和橡胶的组合或材料的另一种组合。变速器可以包括可操作以将机械动力从发动机传输至车轮的元件。为此,变速器可以包括齿轮箱、离合器、差速器和驱动轴。变速器也可以包括其他元件。驱动轴可以包括可以被联接至一个或多个车轮的一个或多个轴。电气系统可以包括可操作以在车辆105中传递和控制电信号的元件。这些电信号可以被用于激活车辆105的灯、伺服、电机以及其他电驱动的或受控的设备。动力源可以表示可以完全或部分地为发动机或电动机提供动力的能源。也就是说,发动机或电动机可以被配置为将动力源转换为机械能。动力源的示例包括:汽油、柴油、其他基于石油的燃料、丙烷、其他基于压缩气体的燃料、乙醇、燃料电池、太阳能板、蓄电池以及其他电力源。附加地或备选地,动力源可以包括燃料箱、蓄电池、电容器或飞轮的任何组合。动力源还可以为车辆105的其他子系统提供能量。Vehicle 105 may include various vehicle subsystems, such as
车辆传感器子系统144可以包括被配置为感测有关车辆105的环境或状况的信息的若干传感器。例如,车辆传感器子系统144可以包括惯性测量单元(IMU)、全球定位系统(GPS)收发器、RADAR单元、激光测距仪/LIDAR单元以及一个或多个摄像头或图像捕获设备。车辆传感器子系统144还可以包括被配置为监测车辆105的内部系统的传感器(例如O2监视器、燃油表、发动机油温)。其他传感器也是可能的。车辆传感器子系统144中所包括的传感器中的一个或多个传感器可以被配置为单独地或共同地被致动,以修改一个或多个传感器的位置、定向或两者。The vehicle sensor subsystem 144 may include several sensors configured to sense information about the environment or conditions of the vehicle 105 . For example, the vehicle sensor subsystem 144 may include an inertial measurement unit (IMU), a global positioning system (GPS) transceiver, a RADAR unit, a laser rangefinder/LIDAR unit, and one or more cameras or image capture devices. The vehicle sensor subsystem 144 may also include sensors configured to monitor internal systems of the vehicle 105 (eg, O2 monitor, fuel gauge, engine oil temperature). Other sensors are also possible. One or more of the sensors included in the vehicle sensor subsystem 144 may be configured to be individually or collectively actuated to modify the position, orientation, or both of the one or more sensors.
IMU可以包括被配置为基于惯性加速度来感测车辆105的位置和定向变化的传感器(例如加速度计和陀螺仪)的任何组合。GPS收发器可以是被配置为估计车辆105的地理位置的任何传感器。为此,GPS收发器可以包括可操作以提供有关车辆105相对于地球的位置的信息的接收器/发送器。RADAR单元可以表示利用无线电信号来感测在车辆105的局部环境内的物体的系统。在一些实施例中,除了感测物体之外,RADAR单元还可以被配置为感测在车辆105附近的物体的速度和前进方向。激光测距仪或LIDAR单元可以是被配置为使用激光来感测车辆105所处的环境中的物体的任何传感器。在示例实施例中,激光测距仪/LIDAR单元可以包括一个或多个激光源、激光扫描仪和一个或多个检测器以及其他系统部件。激光测距仪/LIDAR单元可以被配置为以相干(例如使用外差检测)或非相干检测模式进行操作。摄像头可以包括被配置为捕获车辆105的环境的多个图像的一个或多个设备。摄像头可以是静止图像摄像头或运动视频摄像头。The IMU may include any combination of sensors (eg, accelerometers and gyroscopes) configured to sense changes in position and orientation of the vehicle 105 based on inertial acceleration. The GPS transceiver may be any sensor configured to estimate the geographic location of the vehicle 105 . To this end, the GPS transceiver may include a receiver/transmitter operable to provide information about the position of the vehicle 105 relative to the earth. A RADAR unit may represent a system that utilizes radio signals to sense objects within the local environment of the vehicle 105 . In some embodiments, in addition to sensing objects, the RADAR unit may be configured to sense the speed and heading of objects in the vicinity of the vehicle 105 . A laser rangefinder or LIDAR unit may be any sensor configured to use a laser to sense objects in the environment in which the vehicle 105 is located. In an example embodiment, a laser rangefinder/LIDAR unit may include one or more laser sources, laser scanners, and one or more detectors, among other system components. The laser rangefinder/LIDAR unit may be configured to operate in coherent (eg using heterodyne detection) or incoherent detection mode. The cameras may include one or more devices configured to capture multiple images of the environment of the vehicle 105 . The camera can be a still image camera or a motion video camera.
车辆控制子系统146可以被配置为控制车辆105及其部件的操作。因此,车辆控制子系统146可以包括各种元件,诸如转向单元、风门、制动单元、导航单元和自主控制单元。The vehicle control subsystem 146 may be configured to control the operation of the vehicle 105 and its components. Accordingly, the vehicle control subsystem 146 may include various elements such as steering units, dampers, braking units, navigation units, and autonomous control units.
转向单元可以表示可操作以调整车辆105的前进方向的机构的任何组合。风门可以被配置为控制例如发动机的运转速度,并且转而控制车辆105的速度。制动单元可以包括被配置为使车辆105减速的机构的任何组合。制动单元可以使用摩擦来按照标准方式使车轮减慢。在其他实施例中,制动单元可以将车轮的动能转换为电流。制动单元也可以采取其他形式。导航单元可以是被配置为确定车辆105的驾驶路径或路线的任何系统。导航单元还可以被配置为在车辆105运行时动态地更新驾驶路径。在一些实施例中,导航单元可以被配置为合并来自图像处理模块200、GPS收发器和一个或多个预定地图的数据,以确定车辆105的驾驶路径。自主控制单元可以表示一种控制系统,该控制系统被配置为标识、评估、并且避开或以其他方式越过车辆105的环境中的潜在障碍。通常,自主控制单元可以被配置为在没有驾驶员的情况下控制车辆105进行操作或在控制车辆105时提供驾驶员帮助。在一些实施例中,自主控制单元可以被配置为合并来自图像处理模块200、GPS收发器、RADAR、LIDAR、摄像头以及其他车辆子系统的数据以确定车辆105的驾驶路径或轨迹。附加地或备选地,车辆控制子系统146可以包括除了示出的和描述的那些部件之外的部件。The steering unit may represent any combination of mechanisms operable to adjust the heading of the vehicle 105 . The damper may be configured to control, for example, the operating speed of the engine, and in turn, the speed of the vehicle 105 . The braking unit may include any combination of mechanisms configured to decelerate the vehicle 105 . The braking unit can use friction to slow down the wheel in a standard way. In other embodiments, the braking unit may convert the kinetic energy of the wheels into electrical current. The braking unit may also take other forms. The navigation unit may be any system configured to determine the driving path or route of the vehicle 105 . The navigation unit may also be configured to dynamically update the driving path while the vehicle 105 is operating. In some embodiments, the navigation unit may be configured to combine data from the image processing module 200 , the GPS transceiver, and one or more predetermined maps to determine the driving path of the vehicle 105 . The autonomous control unit may represent a control system configured to identify, evaluate, and avoid or otherwise overcome potential obstacles in the environment of the vehicle 105 . Typically, the autonomous control unit may be configured to control the operation of the vehicle 105 without a driver or to provide driver assistance while controlling the vehicle 105 . In some embodiments, the autonomous control unit may be configured to combine data from the image processing module 200 , GPS transceiver, RADAR, LIDAR, cameras, and other vehicle subsystems to determine the driving path or trajectory of the vehicle 105 . Additionally or alternatively, the vehicle control subsystem 146 may include components other than those shown and described.
乘员接口子系统148可以被配置为允许车辆105与外部传感器、其他车辆、其他计算机系统和/或车辆105的乘员或用户之间的交互。例如,乘员接口子系统148可以包括标准的视觉显示设备(例如等离子显示器、液晶显示器(LCD)、触摸屏显示器、平视显示器等)、扬声器或其他音频输出设备、麦克风或其他音频输入设备、导航接口以及用于控制车辆105的内部环境(例如温度、风扇等)的接口。在示例实施例中,乘员接口子系统148可以提供例如用于车辆105的用户/乘员与其他车辆子系统进行交互的装置。视觉显示设备可以向车辆105的用户提供信息。用户界面设备还可以可操作以经由触摸屏来接受来自用户的输入。触摸屏可以被配置为经由电容感测、电阻感测或表面声波过程以及其他可能性来感测用户的手指的位置和移动中的至少一项。触摸屏或许能够感测在平行于触摸屏表面或与触摸屏表面成平面的方向上、在垂直于触摸屏表面的方向上或在这两个方向上的手指移动,并且或许还能够感测施加到触摸屏表面的压力的水平。触摸屏可以由一个或多个半透明的或透明的绝缘层和一个或多个半透明的或透明的导电层形成。触摸屏也可以采取其他形式。在其他实例中,乘员接口子系统148可以为车辆105提供用于与其环境内的设备进行通信的装置。麦克风可以被配置为接收来自车辆105的用户的音频(例如语音命令或其他音频输入)。类似地,扬声器可以被配置为向车辆105的用户输出音频。在一个示例实施例中,乘员接口子系统148可以被配置为直接或经由通信网络与一个或多个设备进行无线通信。例如,无线通信系统可以使用3G蜂窝通信(诸如CDMA、EVDO、GSM/GPRS)或4G蜂窝通信(诸如WiMAX或LTE)。备选地,无线通信系统可以与无线局域网(WLAN)进行通信,例如使用


车辆105的功能中的许多或全部功能可以由计算系统170控制。计算系统170可以包括执行被存储在非暂时性计算机可读介质(诸如数据存储设备172)中的处理指令的至少一个数据处理器171(该至少一个数据处理器171可以包括至少一个微处理器)。计算系统170还可以表示可以用于以分布式方式控制车辆105的单独的部件或子系统的多个计算设备。在一些实施例中,数据存储设备172可以包括可由数据处理器171执行以执行车辆105的各种功能(包括本文结合附图描述的那些功能)的处理指令(例如程序逻辑)。数据存储设备172也可以包括其他指令,这些指令包括以下指令:向车辆驱动子系统142、车辆传感器子系统144、车辆控制子系统146、乘员接口子系统148中的一个或多个子系统传输数据,从该一个或多个子系统接收数据,与该一个或多个子系统进行交互,或控制该一个或多个子系统。Many or all of the functions of the vehicle 105 may be controlled by the computing system 170 . Computing system 170 may include at least one data processor 171 (the at least one data processor 171 may include at least one microprocessor) that executes processing instructions stored in a non-transitory computer-readable medium, such as data storage device 172 . Computing system 170 may also represent multiple computing devices that may be used to control individual components or subsystems of vehicle 105 in a distributed fashion. In some embodiments, the data storage device 172 may include processing instructions (eg, program logic) executable by the data processor 171 to perform various functions of the vehicle 105 , including those described herein in connection with the figures. Data storage device 172 may also include other instructions including instructions to transmit data to one or more of
除了处理指令之外,数据存储设备172还可以存储数据,诸如图像处理参数、训练数据、道路地图和路径信息以及其他信息。车辆105和计算系统170可以在车辆105以自主、半自主和/或手动模式进行操作期间使用这种信息。In addition to processing instructions, data storage device 172 may store data such as image processing parameters, training data, road maps and route information, and other information. The vehicle 105 and computing system 170 may use such information during operation of the vehicle 105 in autonomous, semi-autonomous, and/or manual modes.
车辆105可以包括用于向车辆105的用户或乘员提供信息或接收来自车辆105的用户或乘员的信息的用户界面。该用户界面可以控制可以显示在显示设备上的交互式图像的内容和布局或启用对该内容或布局的控制。进一步地,该用户界面可以包括在该组乘员界面子系统148内的一个或多个输入/输出设备,诸如显示设备、扬声器、麦克风或无线通信系统。The vehicle 105 may include a user interface for providing information to or receiving information from a user or occupant of the vehicle 105 . The user interface may control or enable control of the content and layout of interactive images that may be displayed on the display device. Further, the user interface may include one or more input/output devices within the crew interface subsystem 148, such as display devices, speakers, microphones, or wireless communication systems.
计算系统170可以基于从各种车辆子系统(例如车辆驱动子系统142、车辆传感器子系统144和车辆控制子系统146)以及从乘员接口子系统148接收到的输入来控制车辆105的功能。例如,计算系统170可以使用来自车辆控制子系统146的输入以控制转向单元以避开由车辆传感器子系统144和图像处理模块200检测到的障碍,按照受控方式移动,或者跟随基于由图像处理模块200生成的输出的路径或轨迹。在示例实施例中,计算系统170可以可操作以提供对车辆105及其子系统的许多方面的控制。Computing system 170 may control functions of vehicle 105 based on inputs received from various vehicle subsystems (eg,
虽然图1将车辆105的各种部件(例如车辆子系统140、计算系统170、数据存储设备172和图像处理模块200)示出为被集成到车辆105中,但是这些部件中的一个或多个部件可以与车辆105分开安装或相关联。例如,数据存储设备172可以部分地或完全与车辆105分开地存在。因此,可以按照可以被分开或一起定位的设备元件的形式,来提供车辆105。组成车辆105的设备元件可以按照有线或无线方式被通信地耦合在一起。Although FIG. 1 shows various components of vehicle 105 (eg,
附加地,如上所述的车载控制系统150可以从本地和/或远程源获得其他数据和/或内容(在本文中被表示为辅助数据)。如本文描述的,辅助数据可以被用于基于各种因子来增强、修改或训练图像处理模块200的操作,该各种因子包括:用户正操作车辆的环境(例如车辆的位置、指定的目的地、行进方向、速度、当日时间、车辆的状态等)以及可从这些各种源(本地的和远程的)获得的各种其他数据。Additionally, the
在特定实施例中,车载控制系统150和图像处理模块200可以被实施为车辆105的车载部件。在各种示例实施例中,车载控制系统150和与之进行数据通信的图像处理模块200可以被实施为集成部件或单独的部件。在示例实施例中,可以通过使用经由网络120的与移动设备132和/或网络资源122的数据连接来动态地升级、修改和/或增强车载控制系统150和/或图像处理模块200的软件部件。车载控制系统150可以周期性地向移动设备132或网络资源122查询更新,或者可以向车载控制系统150推送更新。In certain embodiments, the
用于车辆车轮检测的系统和方法System and method for vehicle wheel detection
在本文所公开的各种示例实施例中,提供了一种用于使用图像分割的车辆车轮检测的系统和方法。在示例实施例中,该系统包括三个组成部分:1)数据收集和注释、2)使用深度卷积神经网络的模型训练以及3)实时模型推理。为了利用最新的深度学习模型和训练策略,本文所公开的各种示例实施例将车轮检测问题形成为两类分割任务,并且在擅长多类语义分割问题的深度神经网络上进行训练。当该系统获得对给定车辆的准确的车轮特征分割分析时,该系统可以获得或推理出有价值的车辆信息,诸如姿势、位置、意图和轨迹。该车辆信息可以为用于自主驾驶的感知、定位和计划系统提供很大益处。在本文描述的各种示例实施例中,下面描述了车辆车轮检测系统的部件。In various example embodiments disclosed herein, a system and method for vehicle wheel detection using image segmentation is provided. In an example embodiment, the system includes three components: 1) data collection and annotation, 2) model training using deep convolutional neural networks, and 3) real-time model inference. To take advantage of state-of-the-art deep learning models and training strategies, the various example embodiments disclosed herein formulate the wheel detection problem as a two-class segmentation task and train on deep neural networks that excel at multi-class semantic segmentation problems. When the system obtains an accurate segmentation analysis of wheel features for a given vehicle, the system can obtain or infer valuable vehicle information such as pose, position, intent, and trajectory. This vehicle information can provide great benefits to perception, localization, and planning systems for autonomous driving. In the various example embodiments described herein, components of a vehicle wheel detection system are described below.
数据收集和注释Data collection and annotation
在各种示例实施例中,可以按照不同的方式来定义车轮分割问题,诸如1)只需要矩形边界框的四个角的位置的边界框回归问题;2)需要对车轮区域进行像素级标记的语义分割问题或者3)实例分割问题,该实例分割问题需要为每个单个车轮分配不同的实例标识符编号(ID)。本文所描述的示例实施例提供了对于所有可能的任务都是高效并且适合的注释范例。由于车辆车轮通常共享相似的可见形状,诸如圆形或椭圆形,因此,由示例实施例执行的处理将车辆车轮注释任务变换为轮廓注释任务。也就是说,示例实施例可以被配置为标识和渲染围绕在输入图像中检测到的每个车辆车轮的轮廓线或轮廓。根据车辆车轮轮廓,示例实施例可以被配置为通过提取针对每个车轮轮廓的所有四个方向(上、下、左、右)的极值并且从这些极值生成对应的边界框来生成对应的检测边界框。附加地,示例实施例可以被配置为通过填充由车轮轮廓限定的内部区域来获得与车辆车轮轮廓对应的语义分割标签。最后,示例实施例还可以通过对封闭的车辆车轮轮廓的数量进行计数并且为在输入图像中检测到的车辆车轮的每个实例生成不同的实例标识符编号(ID)来获得车辆车轮实例标签。因此,示例实施例可以基于在输入图像中标识的车辆车轮轮廓来生成各种信息。重要的是:对于人类贴标人员而言,绘制车辆车轮轮廓非常容易,从而帮助我们高效地建立大型的机器学习训练数据集。因此,机器学习技术可以被用于使示例实施例能够收集原始训练图像数据以及训练机器学习模型,以标识输入图像中的车辆车轮轮廓,并且对其进行注释。然后,示例实施例可以基于所标识的车辆车轮轮廓来生成上面所描述的各种信息。在图2中示出了由示例实施例产生的样本原始输入图像和车辆车轮轮廓标记结果。In various example embodiments, the wheel segmentation problem can be defined in different ways, such as 1) a bounding box regression problem that only requires the locations of the four corners of a rectangular bounding box; 2) a problem that requires pixel-level labeling of the wheel region A semantic segmentation problem or 3) an instance segmentation problem that requires assigning a different instance identifier number (ID) to each individual wheel. The example embodiments described herein provide an efficient and suitable annotation paradigm for all possible tasks. Since vehicle wheels typically share similar visible shapes, such as circles or ellipses, the processing performed by the example embodiment transforms the vehicle wheel annotation task into a contour annotation task. That is, example embodiments may be configured to identify and render contour lines or contours around each vehicle wheel detected in the input image. From vehicle wheel profiles, example embodiments may be configured to generate corresponding bounding boxes by extracting extrema for all four directions (up, down, left, right) for each wheel profile and generating corresponding bounding boxes from these Detect bounding boxes. Additionally, example embodiments may be configured to obtain semantic segmentation labels corresponding to vehicle wheel contours by filling in interior regions defined by wheel contours. Finally, example embodiments may also obtain vehicle wheel instance labels by counting the number of closed vehicle wheel profiles and generating a different instance identifier number (ID) for each instance of the vehicle wheel detected in the input image. Accordingly, example embodiments may generate various information based on vehicle wheel profiles identified in input images. Important: Contouring vehicle wheels is very easy for human labelers, helping us efficiently build large machine learning training datasets. Accordingly, machine learning techniques may be used to enable example embodiments to collect raw training image data and train machine learning models to identify and annotate vehicle wheel contours in input images. Example embodiments may then generate the various information described above based on the identified vehicle wheel profiles. A sample raw input image and vehicle wheel contour labeling results produced by an example embodiment are shown in FIG. 2 .
图2图示了从自主车辆的摄像头获取的原始输入图像(图2,上半部图像)和由示例实施例产生的对应车辆车轮轮廓标记或注释结果(图2,相反颜色的下半部图像)。添加了在图2中所示出的虚线箭头以高亮车辆车轮轮廓注释的每个实例与原始输入图像的导出车辆车轮轮廓注释的部分之间的关联。如下面更详细地描述的,训练过的机器学习模型可以被用于从原始输入图像生成车辆车轮轮廓注释。通过本文所公开的示例实施例实现的这种轮廓级车辆车轮注释提供了若干重要的益处,包括允许将检测到的车辆车轮对象信息变换为任何所需格式。Figure 2 illustrates the raw input image acquired from the camera of the autonomous vehicle (Figure 2, upper image) and the corresponding vehicle wheel outline marking or annotation results produced by an example embodiment (Figure 2, lower image in opposite colors) ). The dashed arrows shown in Figure 2 were added to highlight the association between each instance of the vehicle wheel outline annotation and the portion of the original input image where the vehicle wheel outline annotation was derived. As described in more detail below, the trained machine learning model can be used to generate vehicle wheel outline annotations from raw input images. Such contour-level vehicle wheel annotations, as implemented by example embodiments disclosed herein, provide several important benefits, including allowing for the transformation of detected vehicle wheel object information into any desired format.
模型训练model training
在本文所描述的示例实施例中,监督学习方法可以被用于对在一组输入图像中捕获到的对象、对象特征和对象关系的分类。监督学习方法包括在离线训练阶段中使用一组训练数据或测试数据来训练分类器或模型的过程。通过要求输入图像中的每个对象(例如车辆车轮)的预定义特征和手动注释的标签,示例实施例可以对许多静态训练图像训练一个或多个机器学习分类器。附加地,示例实施例可以对训练图像序列训练机器学习分类器。在训练阶段之后,训练过的机器学习分类器可以被用于第二阶段(操作或推理阶段),以接收实时图像,并且在接收到的图像中有效地并且高效地检测每个车轮的车轮特征。下面更详细地描述了对示例实施例中的机器学习分类器的训练和操作使用。In example embodiments described herein, supervised learning methods may be used to classify objects, object features, and object relationships captured in a set of input images. Supervised learning methods include the process of training a classifier or model using a set of training data or test data in an offline training phase. Example embodiments may train one or more machine learning classifiers on many static training images by requiring predefined features and manually annotated labels for each object (eg, vehicle wheel) in the input image. Additionally, example embodiments may train machine learning classifiers on sequences of training images. After the training phase, the trained machine learning classifier can be used in the second phase (operation or inference phase) to receive real-time images and effectively and efficiently detect the wheel features of each wheel in the received images . The training and operational use of machine learning classifiers in example embodiments are described in more detail below.
现在参照图3,可以在用于自主车辆的自主车辆车轮检测系统210的语境中使用本文公开的示例实施例。如上所述,自主车辆车轮检测系统210可以被包括在如上所述的图像处理模块200中或由该图像处理模块200执行。自主车辆车轮检测系统210可以包括一个或多个车辆车轮对象轮廓分类器211,该一个或多个车辆车轮对象轮廓分类器211可以与本文所描述的机器学习分类器对应。可以等效地使用其他类型的分类器或模型。图3图示了离线训练阶段(第一阶段),该离线训练阶段被用于基于表示地面实况的训练图像数据收集系统201和手动注释数据收集系统203,来配置或训练示例实施例中的自主车辆车轮检测系统210以及其中的分类器211。在示例实施例中,训练图像数据收集系统201可以被用于收集感知数据,以与训练图像数据一起训练或配置用于自主车辆车轮检测系统210的处理参数。如下面针对示例实施例的更详细地描述的,在初始训练阶段之后,自主车辆车轮检测系统210可以被用于操作、推理或模拟阶段(第二阶段),以基于由自主车辆车轮检测系统210接收到的图像数据、并且基于自主车辆车轮检测系统210在初始离线训练阶段期间接收的训练,来生成图像特征预测和车轮轮廓特征检测。Referring now to FIG. 3 , example embodiments disclosed herein may be used in the context of an autonomous vehicle wheel detection system 210 for an autonomous vehicle. As described above, the autonomous vehicle wheel detection system 210 may be included in or executed by the image processing module 200 as described above. The autonomous vehicle wheel detection system 210 may include one or more vehicle wheel object contour classifiers 211, which may correspond to the machine learning classifiers described herein. Other types of classifiers or models can be used equivalently. Figure 3 illustrates the offline training phase (first phase) used to configure or train the autonomous in an example embodiment based on the training image data collection system 201 representing the ground truth and the manual annotation
再次参照图3,训练图像数据收集系统201可以包括感知信息收集设备或传感器的阵列,该阵列可以包括图像生成设备(例如摄像头)、辐射受激发射光放大(激光)设备、光检测和测距(LIDAR)设备、全球定位系统(GPS)设备、声音导航和测距(声纳)设备、无线电检测和测距(雷达)设备等。由信息收集设备在各个交通位置收集的感知信息可以包括交通或车辆图像数据、道路数据、环境数据、来自LIDAR或雷达设备的距离数据以及从位于特定道路(例如所监测的位置)附近的数据收集系统201的信息收集设备接收到的其他传感器信息。附加地,数据收集系统201可以包括被安装在移动的测试车辆中的信息收集设备,这些移动的测试车辆在感兴趣的环境或位置中通过预定路线来进行导航。地面实况数据的一些部分还可以由数据收集系统201收集。Referring again to FIG. 3, the training image data collection system 201 may include an array of perceptual information collection devices or sensors, which may include image generation devices (eg, cameras), radiation stimulated emission light amplification (laser) devices, light detection and ranging ( LIDAR) equipment, global positioning system (GPS) equipment, sound navigation and ranging (sonar) equipment, radio detection and ranging (radar) equipment, etc. Perceptual information collected by information collection devices at various traffic locations may include traffic or vehicle image data, road data, environmental data, distance data from LIDAR or radar devices, and data collected from data located near a particular road (eg, the monitored location) The information of the system 201 collects other sensor information received by the device. Additionally, the data collection system 201 may include information collection devices installed in moving test vehicles that navigate through predetermined routes in environments or locations of interest. Some portions of the ground truth data may also be collected by the data collection system 201 .
为了扩大大小并且改善训练图像数据集的方差,在以下广泛的驾驶场景下,数据收集系统201可以从被安装在车辆上的广角摄像头和长焦摄像头收集图像:本地、公路、晴天、多云、城市、乡村、桥梁、沙漠等。训练图像数据集可以被分为用于模型训练的训练数据集和用于模型评估的测试数据集。To increase the size and improve the variance of the training image dataset, the data collection system 201 can collect images from wide-angle and telephoto cameras mounted on the vehicle in the following broad driving scenarios: local, highway, sunny, cloudy, urban , villages, bridges, deserts, etc. The training image dataset can be divided into a training dataset for model training and a test dataset for model evaluation.
图像数据收集系统201可以在不同的场景下收集车辆、运动或静态物体、道路特征、环境特征的实际图像以及对应的地面实况数据。不同的场景可以与不同的位置、不同的交通模式、不同的环境条件等对应。由数据收集系统201收集的图像数据和其他感知数据以及地面实况数据反映与位置或路线、场景、被监测的车辆或物体相关的真实的现实世界交通信息。通过使用众所周知的数据收集设备的标准能力,收集到的交通和车辆图像数据以及其他感知或传感器数据可以被无线地传递(或以其他方式传递)至标准计算系统的数据处理器,在该数据处理器上,可以执行图像数据收集系统201。备选地,收集到的交通和车辆图像数据以及其他感知或传感器数据可以被存储在位于所监测的位置处的存储器设备中或测试车辆中,并且随后被传递给标准计算系统的数据处理器。The image data collection system 201 may collect actual images of vehicles, moving or static objects, road features, environmental features, and corresponding ground truth data in different scenarios. Different scenarios can correspond to different locations, different traffic patterns, different environmental conditions, etc. The image data and other sensory data and ground truth data collected by the data collection system 201 reflect actual real-world traffic information related to locations or routes, scenes, vehicles or objects being monitored. Using the standard capabilities of well-known data collection devices, the collected traffic and vehicle image data and other sensory or sensor data can be wirelessly transferred (or otherwise transferred) to a data processor of a standard computing system, where the data is processed On the server, the image data collection system 201 may be implemented. Alternatively, the collected traffic and vehicle image data and other sensory or sensor data may be stored in a memory device located at the monitored location or in a test vehicle, and then passed to a data processor of a standard computing system.
如在图3中示出的,提供手动注释数据收集系统203以将标签应用于在由数据收集系统201收集到的训练图像中找到的特征。可以通过人类贴标人员或自动化过程来分析这些训练图像,以为在训练图像中标识的特征中的每个特征手动地定义标签或分类。手动施加的数据还可以包括对象关系信息,该对象关系信息包括在训练图像数据帧中的每个对象的状态。例如,手动贴标人员可以绘制在训练图像数据集中检测到的车辆车轮对象的轮廓。同样地,手动注释的图像标签和对象关系信息可以表示与来自图像数据收集系统201的训练图像对应的地面实况数据。这些特征标签或地面实况数据可以被提供至自主车辆车轮检测系统210作为下面更详细地描述的离线训练阶段的一部分。As shown in FIG. 3 , a manual annotation
可以使用由训练图像数据收集系统201收集或计算的用于训练的交通和车辆图像数据以及其他感知或传感器数据、特征标签数据和地面实况数据以及由手动注释数据收集系统203产生的对象或特征标签,来生成训练数据,该训练数据可以由自主车辆车轮检测系统210在离线训练阶段处理。例如,如众所周知的,分类器、模型、神经网络以及其他机器学习系统可以在训练阶段被训练为基于提供至分类器、模型、神经网络或其他机器学习系统的训练数据来产生所配置的输出。如下面更详细地描述的,由图像数据收集系统201和手动注释数据收集系统203提供的训练数据可以被用于训练自主车辆车轮检测系统210以及其中的分类器211,以确定与在训练图像中标识的对象(例如车轮)对应的车辆车轮轮廓特征。下面更详细地描述了自主车辆车轮检测系统210的离线训练阶段。Traffic and vehicle image data collected or computed by the training image data collection system 201 for training, as well as other sensory or sensor data, feature label data, and ground truth data, and object or feature labels generated by the manual annotation
示例实施例可以在车辆车轮检测过程中训练和使用机器学习分类器。这些机器学习分类器在图3中被表示为车辆车轮对象轮廓分类器211。在示例实施例中,可以利用来自训练图像数据集的图像来训练车辆车轮对象轮廓分类器211。按照这种方式,车辆车轮对象轮廓分类器211可以有效地并且高效地从一组输入图像中检测每个车辆的车辆车轮特征。下面更详细地描述了对示例实施例中的车辆车轮对象轮廓分类器211的训练。Example embodiments may train and use machine learning classifiers during vehicle wheel detection. These machine learning classifiers are represented in FIG. 3 as vehicle wheel object contour classifier 211 . In an example embodiment, the vehicle wheel object contour classifier 211 may be trained using images from a training image dataset. In this manner, the vehicle wheel object contour classifier 211 can effectively and efficiently detect vehicle wheel characteristics for each vehicle from a set of input images. The training of the vehicle wheel object contour classifier 211 in an example embodiment is described in more detail below.
现在参照图4(上半部图像),该图图示了原始示例原始训练图像与地面实况相结合的混合可视化。图4图示了样本训练图像,该样本训练图像可以由示例实施例用来训练车辆车轮对象轮廓分类器211,以处理训练图像。原始训练图像可以是由如上所述的训练图像数据收集系统201提供至自主车辆车轮检测系统210的训练图像中的一个训练图像。来自原始训练图像的训练图像数据可以被收集并且被提供至自主车辆车轮检测系统210,在该自主车辆车轮检测系统210中,可以提取原始训练图像的特征。语义分割或相似的过程可以被用于特征提取。如众所周知的,特征提取可以为在图像数据中标识的每个特征或对象提供像素级对象标签和边界框。在许多情况下,在图像数据中标识的特征或对象将与车辆车轮对象对应。同样地,可以提取输入训练图像中的车辆车轮对象,并且用标签和边界框来进行表示。边界框可以被表示为大小与提取的车辆车轮对象的轮廓对应的矩形框。附加地,还可以使用已知技术来执行对每个车辆车轮对象的对象级轮廓检测。因此,针对每个接收到的训练图像,自主车辆车轮检测系统210可以获得或产生用标签和边界框表示的车辆车轮对象检测数据以及对训练图像中的每个车辆车轮对象实例的对象级轮廓检测。现在参照图4(下半部图像),该图图示了根据示例实施例的可以被用于训练分割模型的示例地面实况标签图。Referring now to Figure 4 (upper image), this figure illustrates a hybrid visualization of the original example raw training image combined with the ground truth. FIG. 4 illustrates sample training images that may be used by example embodiments to train a vehicle wheel object contour classifier 211 to process the training images. The original training image may be one of the training images provided to the autonomous vehicle wheel detection system 210 by the training image data collection system 201 as described above. Training image data from the original training images may be collected and provided to an autonomous vehicle wheel detection system 210 where features of the original training images may be extracted. Semantic segmentation or similar processes can be used for feature extraction. As is well known, feature extraction can provide pixel-level object labels and bounding boxes for each feature or object identified in image data. In many cases, the features or objects identified in the image data will correspond to vehicle wheel objects. Likewise, vehicle wheel objects in the input training images can be extracted and represented with labels and bounding boxes. The bounding box can be represented as a rectangular box whose size corresponds to the outline of the extracted vehicle wheel object. Additionally, object-level contour detection of each vehicle wheel object may also be performed using known techniques. Thus, for each received training image, the autonomous vehicle wheel detection system 210 may obtain or generate vehicle wheel object detection data represented by labels and bounding boxes as well as object-level contour detection for each vehicle wheel object instance in the training image . Referring now to FIG. 4 (lower half of the image), this figure illustrates an example ground truth label map that may be used to train a segmentation model according to example embodiments.
由于车辆车轮的确切形状和准确位置比边界框提供更多的信息,因此,示例实施例可以采用语义分割框架来进行车辆车轮检测任务,与实例分割任务相比较,该车辆车轮检测任务也不会过于复杂。可以如下描述该问题的正式定义:Since the exact shape and exact location of vehicle wheels provide more information than bounding boxes, example embodiments may employ a semantic segmentation framework for the vehicle wheel detection task, which also does not Overcomplicated. A formal definition of the problem can be described as follows:
给定原始输入RGB(红色/绿色/蓝色)图像I,Given a raw input RGB (red/green/blue) image I,
输出具有与I相同大小的标签图Routput a label map R with the same size as I
其中车辆车轮像素被标记为1where the vehicle wheel pixel is marked as 1
并且背景像素被标记为0。And the background pixels are marked as 0.
通过填充由车辆车轮轮廓限定的内部区域并且执行扩张以获得更多的正训练样本(例如车轮对象),示例实施例可以生成地面实况以减轻潜在的数据不平衡问题。Example embodiments may generate a ground truth to mitigate potential data imbalance issues by filling in the interior area defined by the vehicle wheel contours and performing dilation to obtain more positive training samples (eg, wheel objects).
示例实施例可以使用全卷积神经网络(FCN)作为针对如本文描述的车辆车轮对象轮廓检测任务而训练的机器学习模型。FCN的一般形式已经被广泛应用于像素级图像到图像学习任务。在示例实施例中,针对车辆车轮对象轮廓检测任务(例如机器学习模型)而训练的FCN可以被定制为包括如在上面引用的相关专利申请中描述的使用密集上采样卷积(DUC)的语义分割和使用混合扩张卷积(HDC)的语义分割。关于更复杂的多类场景解析任务,可以对针对车辆车轮对象轮廓检测任务的FCN进行预训练,因此,经过学习的特征可以加快训练过程。由于图像背景包括比图像前景(例如车辆车轮)多得多的像素,因此,示例实施例可以使用加权的多逻辑损失函数来训练机器学习模型,以确保适当的训练并且减轻过度拟合。示例实施例可以使用随机梯度下降(SGD)来训练整个机器学习模型,以便进行足够的迭代以确保收敛。Example embodiments may use a fully convolutional neural network (FCN) as a machine learning model trained for a vehicle wheel object contour detection task as described herein. The general form of FCN has been widely used for pixel-level image-to-image learning tasks. In an example embodiment, an FCN trained for a vehicle wheel object contour detection task (eg, a machine learning model) may be tailored to include semantics using dense upsampling convolution (DUC) as described in the above-cited related patent applications Segmentation and Semantic Segmentation Using Hybrid Dilated Convolution (HDC). For more complex multi-class scene parsing tasks, FCNs for vehicle wheel object contour detection tasks can be pre-trained, so the learned features can speed up the training process. Since the image background includes many more pixels than the image foreground (eg, vehicle wheels), example embodiments may use a weighted multiple logistic loss function to train a machine learning model to ensure proper training and mitigate overfitting. Example embodiments may use stochastic gradient descent (SGD) to train the entire machine learning model for enough iterations to ensure convergence.
此时,离线训练过程完成,并且已经适当地调整了与一个或多个分类器211相关联的参数,以使一个或多个分类器211充分地检测与输入图像数据对应的车辆对象车轮特征。在通过如上所述的离线训练过程被训练之后,具有其适当调整过的参数的一个或多个分类器211可以被部署在下面结合图5描述的操作、推理或模拟阶段(第二阶段)中。At this point, the offline training process is complete and the parameters associated with the one or more classifiers 211 have been appropriately adjusted to enable the one or more classifiers 211 to adequately detect vehicle object wheel features corresponding to the input image data. After being trained by the offline training process as described above, one or more classifiers 211 with their appropriately adjusted parameters can be deployed in the operation, inference or simulation phase (second phase) described below in connection with FIG. 5 .
推理reasoning
在FCN训练收敛之后,示例实施例可以使用预训练的FCN来在第二或操作阶段中执行模型推理。图5图示了对示例实施例中的自主车辆车轮检测系统210的操作使用或模拟使用的第二阶段。如在图5中示出的,自主车辆车轮检测系统210可以从图像数据收集系统205接收现实世界操作图像数据(包括静态图像和图像序列)。图像数据收集系统205可以包括在自主车辆上或与自主车辆相关联的感知信息收集设备、传感器和/或图像生成设备的阵列,除了图像数据收集系统205收集现实世界操作图像数据而不是训练图像数据之外,与图像数据收集系统201的感知信息收集设备相似。如本文更详细地描述的,通过应用一个或多个训练过的车辆车轮对象轮廓分类器211,自主车辆车轮检测系统210可以处理输入的现实世界操作图像数据,以产生车辆车轮对象数据220,该车辆车轮对象数据220可以由其他自主车辆子系统用来配置或控制自主车辆的操作。同样如上所述,语义分割或相似的过程可以被用于从现实世界图像数据进行车辆车轮对象提取。After the FCN training has converged, example embodiments may use the pretrained FCN to perform model inference in the second or operational phase. FIG. 5 illustrates a second stage of operational or simulated use of the autonomous vehicle wheel detection system 210 in the example embodiment. As shown in FIG. 5 , the autonomous vehicle wheel detection system 210 may receive real-world operational image data (including still images and image sequences) from the image
为了获得推理速度与模型精度之间的折衷,示例实施例可以将所有输入图像的大小调整为512的宽度和288的高度,使得我们在维持较高的准确度(召回率>0.9)的同时实现实时(50HZ)性能。在图6至图10中图示了地面实况图像和对应的预测结果的示例。可以了解到:示例实施例的训练过的模型在各种条件下(诸如不同的车辆类型(例如小汽车、卡车等)、不同的距离(近端和远端)以及不同的照明条件(例如晴天、阴凉处等))实现了优异的结果。To obtain a compromise between inference speed and model accuracy, example embodiments may resize all input images to a width of 512 and a height of 288, allowing us to achieve high accuracy (recall > 0.9) while maintaining high accuracy Real-time (50HZ) performance. Examples of ground truth images and corresponding prediction results are illustrated in Figures 6-10. It can be seen that the trained models of the example embodiments under various conditions (such as different vehicle types (eg, cars, trucks, etc.), different distances (near and far), and different lighting conditions (eg, sunny days) , shade, etc.)) achieved excellent results.
图6(下半部图像)图示了使用训练过的分割模型的示例预测标签图,利用图4的示例图像以及其他训练图像来训练该分割模型。图6(上半部图像)还图示了原始示例图像与预测结果相结合的混合可视化。Figure 6 (bottom half of the image) illustrates an example predicted label map using a trained segmentation model that was trained with the example image of Figure 4 and other training images. Figure 6 (upper image) also illustrates a hybrid visualization of the original example image combined with the predicted results.
图7(下半部图像)图示了根据示例实施例的可以被用于训练分割模型的另一示例地面实况标签图。图7(上半部图像)还图示了原始示例图像与地面实况相结合的混合可视化。Figure 7 (bottom image) illustrates another example ground truth label map that may be used to train a segmentation model according to example embodiments. Figure 7 (upper image) also illustrates a hybrid visualization of the original example image combined with the ground truth.
图8(下半部图像)图示了使用训练过的分割模型的示例预测标签图,利用图7的示例图像以及其他训练图像来训练该分割模型。图8(上半部图像)还图示了原始示例图像与预测结果相结合的混合可视化。Figure 8 (bottom half of the image) illustrates an example predicted label map using a trained segmentation model trained with the example image of Figure 7 along with other training images. Figure 8 (upper image) also illustrates a hybrid visualization of the original example image combined with the predicted results.
图9(下半部图像)图示了根据示例实施例的可以被用于训练分割模型的再一个示例地面实况标签图。图9(上半部图像)还图示了原始示例图像与地面实况相结合的混合可视化。Figure 9 (bottom image) illustrates yet another example ground truth label map that may be used to train a segmentation model according to example embodiments. Figure 9 (upper image) also illustrates a hybrid visualization of the original example image combined with the ground truth.
图10(下半部图像)图示了使用训练过的分割模型的示例预测标签图,利用图9的示例图像以及其他训练图像来训练该分割模型。图10(上半部图像)还图示了原始示例图像与预测结果相结合的混合可视化。Figure 10 (bottom half of the image) illustrates an example predicted label map using a trained segmentation model trained with the example image of Figure 9 and other training images. Figure 10 (upper image) also illustrates a hybrid visualization of the original example image combined with the predicted results.
利用一个或多个训练过的分类器211,自主车辆车轮检测系统210可以处理输入图像数据,以产生车辆车轮对象数据220,该车辆车轮对象数据220可以由其他自主车辆子系统用来配置或控制自主车辆的操作。因此,公开了一种用于针对自主车辆控制的车辆车轮检测的系统和方法。Using one or more trained classifiers 211, the autonomous vehicle wheel detection system 210 may process input image data to generate vehicle wheel object data 220 that may be used by other autonomous vehicle subsystems to configure or control Operation of autonomous vehicles. Accordingly, a system and method for vehicle wheel detection for autonomous vehicle control is disclosed.
现在参照图11,流程图图示了用于车辆车轮检测的系统和方法1000的示例实施例。该示例实施例可以被配置为:从训练图像数据收集系统接收训练图像数据(处理框1010);获得与训练图像数据对应的地面实况数据(处理框1020);执行训练阶段,以训练一个或多个分类器来处理训练图像数据中的图像,以在训练图像数据中的图像中检测车辆车轮对象(处理框1030);从与自主车辆相关联的图像数据收集系统接收操作图像数据(处理框1040);并且执行操作阶段,该操作阶段包括将训练过的一个或多个分类器应用于从操作图像数据提取车辆车轮对象,并且产生车辆车轮对象数据(处理框1050)。Referring now to FIG. 11 , a flowchart illustrates an example embodiment of a system and
如本文使用的并且除非另有说明,否则术语“移动设备”包括可以与本文所描述的车载控制系统150和/或图像处理模块200通信以获得经由任何模式的数据通信传送的数据信号、消息或内容的读取或写入权限的任何计算或通信设备。在许多情况下,移动设备132是手持式便携设备,诸如智能电话、移动电话、蜂窝电话、平板计算机、膝上型计算机、显示寻呼机、射频(RF)设备、红外(IR)设备、全球定位设备(GPS)、个人数字助理(PDA)、手持式计算机、可穿戴计算机、便携式游戏机、其他移动通信和/或计算设备或组合前述设备中的一个或多个的集成设备等。附加地,移动设备132可以是计算设备、个人计算机(PC)、多处理器系统、基于微处理器的或可编程的消费电子设备、网络PC、诊断设备、由车辆119制造商或服务技术人员操作的系统等,但不限于便携式设备。移动设备132可以接收并且处理各种数据格式中的任何一种数据格式的数据。数据格式可以包括或被配置为以任何编程格式、协议或语言进行操作,包括但不限于:JavaScript、C++、iOS、Android等。如本文使用的并且除非另有说明,否则术语“网络资源”包括可以与本文所描述的车载控制系统150和/或图像处理模块200通信以获得经由任何模式的进程间或联网数据通信传送的数据信号、消息或内容的读取或写入权限的任何设备、系统或服务。在许多情况下,网络资源122是数据网络可访问的计算平台,包括:客户端或服务器计算机、网站、移动设备、对等(P2P)网络节点等。附加地,网络资源122可以是网络应用、网络路由器、交换机、桥接器、网关、诊断设备、可由车辆119制造商或服务技术人员操作的系统或能够执行一组指令(顺序的或乱序的)的任何机器,该一组指令指定待由该机器采取的动作。进一步地,虽然只图示了单个机器,但是术语“机器”也可以被理解为包括单独地或联合地执行一组(或多组)指令以执行本文所讨论的方法中的任何一种或多种方法的机器的任何类集。网络资源122可以包括网络可传输数字内容的各种提供者或处理器中的任何一种。通常,采用的文件格式是可扩展标记语言(XML),然而,各种实施例不限于此,并且可以使用其他文件格式。例如,各种实施例可以支持除了超文本标记语言(HTML)/XML之外的数据格式或除了开放式/标准数据格式之外的格式。本文所描述的各种实施例可以支持任何电子文件格式(诸如便携式文档格式(PDF)、音频(例如运动图像专家组音频第3层-MP3等)、视频(例如MP4等)以及由特定内容站点定义的任何专有交换格式)。As used herein and unless otherwise specified, the term "mobile device" includes data signals, messages or data that can communicate with the
与网络资源122一起使用的广域数据网络120(也被称为网络云)可以被配置为将一个计算或通信设备与另一计算或通信设备耦合。可以使网络能够采用任何形式的计算机可读数据或介质来将信息从一个电子设备传送给另一电子设备。除了其他广域网(WAN)、蜂窝电话网络、城域网、局域网(LAN)、其他分组交换网络、电路交换网络、直接数据连接之外,网络120还可以包括互联网,诸如通过通用串行总线(USB)或以太网端口、其他形式的计算机可读介质或其任何组合。除了其他广域网(WAN)、蜂窝电话网络、卫星网络、空中广播网络、AM/FM无线电网络、寻呼机网络、UHF网络、其他广播网络、游戏网络、WiFi网络、对等网络、IP语音(VoIP)网络、城域网、局域网(LAN)、其他分组交换网络、电路交换网络、直接数据连接以外,网络120还可以包括互联网,诸如通过通用串行总线(USB)或以太网端口、其他形式的计算机可读介质或其任何组合。在互连的一组网络上(包括基于不同架构和协议的那些网络),路由器或网关可以用作网络之间的链路,从而使得能够在不同网络上的计算设备之间发送消息。类似地,网络内的通信链路通常可以包括双绞线电缆、USB、火线、以太网或同轴电缆,而网络之间的通信链路可以利用模拟或数字电话线、包括T1、T2、T3和T4的完整或部分专用数字线路、综合业务数字网(ISDN)、数字用户线(DSL)、包括卫星链路的无线链路、蜂窝电话链路或本领域的普通技术人员已知的其他通信链路。此外,远程计算机以及其他相关的电子设备可以经由调制解调器和暂时电话链路被远程地连接至网络。A wide area data network 120 (also referred to as a network cloud) used with network resources 122 may be configured to couple one computing or communication device with another computing or communication device. A network may be enabled to employ any form of computer-readable data or media to communicate information from one electronic device to another. Network 120 may include the Internet, such as through a universal serial bus (USB), in addition to other wide area networks (WANs), cellular telephone networks, metropolitan area networks, local area networks (LANs), other packet switched networks, circuit switched networks, direct data connections ) or an Ethernet port, other form of computer-readable medium, or any combination thereof. In addition to other wide area networks (WANs), cellular telephone networks, satellite networks, over-the-air broadcast networks, AM/FM radio networks, pager networks, UHF networks, other broadcast networks, gaming networks, WiFi networks, peer-to-peer networks, Voice over IP (VoIP) networks , Metropolitan Area Networks, Local Area Networks (LANs), other packet-switched networks, circuit-switched networks, direct data connections, the network 120 may also include the Internet, such as through a Universal Serial Bus (USB) or Ethernet port, other forms of computer read medium or any combination thereof. On an interconnected set of networks, including those based on different architectures and protocols, routers or gateways may serve as links between the networks, enabling messages to be sent between computing devices on different networks. Similarly, communication links within a network may typically include twisted pair cables, USB, Firewire, Ethernet, or coaxial cables, while communication links between networks may utilize analog or digital telephone lines, including T1, T2, T3 and T4's full or partial dedicated digital lines, Integrated Services Digital Network (ISDN), Digital Subscriber Line (DSL), wireless links including satellite links, cellular telephone links or other communications known to those of ordinary skill in the art link. In addition, remote computers and other related electronic devices may be remotely connected to the network via modems and temporary telephone links.
网络120还可以包括可以进一步覆盖独立自组织网络等以提供面向基础架构的连接的各种无线子网络中的任何无线子网络。这种子网络可以包括网状网络、无线LAN(WLAN)网络、蜂窝网络等。该网络还可以包括通过无线无线电链路或无线收发器被连接的终端、网关、路由器等的自治系统。这些连接器可以被配置为自由和随机地移动并且任意地进行组织,使得网络的拓扑可以快速发生变化。网络120还可以采用多种标准的无线和/或蜂窝协议或接入技术中的一种或多种技术,包括本文结合在附图中描述的网络接口712和网络714阐述的那些技术。The network 120 may also include any of a variety of wireless sub-networks that may further overlay an independent ad hoc network or the like to provide infrastructure-oriented connectivity. Such sub-networks may include mesh networks, wireless LAN (WLAN) networks, cellular networks, and the like. The network may also include autonomous systems of terminals, gateways, routers, etc. connected by wireless radio links or wireless transceivers. These connectors can be configured to move freely and randomly and be organized arbitrarily so that the topology of the network can change rapidly. Network 120 may also employ one or more of a variety of standard wireless and/or cellular protocols or access technologies, including those set forth herein in connection with network interface 712 and network 714 depicted in the figures.
在特定实施例中,移动设备132和/或网络资源122可以用作使用户能够访问和使用车载控制系统150和/或图像处理模块200以与车辆子系统的一个或多个部件进行交互的客户端设备。实际上,这些客户端设备132或122可以包括被配置为通过网络(诸如本文描述的网络120)来发送和接收信息的任何计算设备。这种客户端设备可以包括移动设备,诸如蜂窝电话、智能电话、平板计算机、显示寻呼机、射频(RF)设备、红外(IR)设备、全球定位设备(GPS)、个人数字助理(PDA)、手持式计算机、可穿戴计算机、游戏机、组合前述设备中的一个或多个的集成设备等。客户端设备还可以包括其他计算设备,诸如个人计算机(PC)、多处理器系统、基于微处理器的或可编程的消费类电子产品、网络PC等。类似地,客户端设备在能力和特征方面可以广泛地发生变动。例如,被配置为手机的客户端设备可以具有数字小键盘和几行单色LCD显示器,在该单色LCD显示器上,只能显示文本。在另一示例中,网络使能客户端设备可以具有触敏屏幕、手写笔和彩色LCD显示屏,在该彩色LCD显示屏中,可以显示文本和图形。此外,网络使能客户端设备可以包括浏览器应用,使该浏览器应用能够接收和发送无线应用协议消息(WAP)和/或有线应用消息等。在一个实施例中,使浏览器应用能够采用超文本标记语言(HTML)、动态HTML、手持式设备标记语言(HDML)、无线标记语言(WML)、WMLScript、JavaScriptTM、可扩展HTML(xHTML)、紧凑HTML(CHTML)等,以显示和发送具有相关信息的消息。In certain embodiments,
客户端设备还可以包括至少一个客户端应用,该至少一个客户端应用被配置为经由网络传输来从另一计算设备接收内容或消息。客户端应用可以包括提供和接收文本内容、图形内容、视频内容、音频内容、警报、消息、通知等的能力。此外,客户端设备还可以被配置为诸如通过短消息服务(SMS)、直接消息传递(例如Twitter)、电子邮件、多媒体消息服务(MMS)、即时消息传递(IM)、互联网中继聊天(IRC)、mIRC、Jabber、增强型消息传递服务(EMS)、文本消息传递、智能消息传递、空中(OTA)消息传递等来与另一计算设备等之间传送和/或接收消息。客户端设备还可以包括无线应用设备,在该无线应用设备上,客户端应用被配置为使设备的用户能够经由网络来无线地向网络资源发送信息或者从网络资源接收信息。The client device may also include at least one client application configured to receive content or messages from another computing device via a network transmission. Client applications may include the ability to provide and receive textual content, graphical content, video content, audio content, alerts, messages, notifications, and the like. In addition, client devices may also be configured such as via Short Message Service (SMS), Direct Messaging (eg, Twitter), email, Multimedia Messaging Service (MMS), Instant Messaging (IM), Internet Relay Chat (IRC) ), mIRC, Jabber, Enhanced Messaging Service (EMS), text messaging, intelligent messaging, over-the-air (OTA) messaging, etc. to transmit and/or receive messages to and from another computing device or the like. The client device may also include a wireless application device on which the client application is configured to enable a user of the device to wirelessly send information to or receive information from network resources via the network.
可以使用增强执行环境的安全性的系统来实施车载控制系统150和/或图像处理模块200,从而提高安全性并且降低车载控制系统150和/或图像处理模块200以及相关服务可能受到病毒或恶意软件的破坏的可能性。例如,可以使用可信执行环境来实施车载控制系统150和/或图像处理模块200,这可以确保按照安全的方式来存储、处理和传送敏感数据。
图12以计算系统700的示例形式示出了机器的图示,在该计算系统700内,一组指令在被执行时和/或处理逻辑在被激活时可以使机器执行本文所描述的和/或要求保护的方法中的任何一种或多种方法。在备选实施例中,机器以独立设备操作,或者可以被连接(例如联网)到其他机器。在联网部署中,该机器可以在服务器-客户端网络环境中作为服务器或客户端机器操作,或者在对等(或分布式)网络环境中操作为对等机。该机器可以是个人计算机(PC)、膝上型计算机、平板计算系统、个人数字助理(PDA)、蜂窝电话、智能电话、网络应用、机顶盒(STB)、网络路由器、交换机或桥接器或能够执行一组指令(顺序的或乱序的)或激活处理逻辑的任何机器,该一组指令或处理逻辑指定待由该机器采取的动作。进一步地,虽然只图示了单个机器,但是术语“机器”也可以被理解为包括单独地或联合地执行一组(或多组)指令或处理逻辑的机器的任何类集,该一组(或多组)指令或处理逻辑用于执行本文所描述的和/或要求保护的方法中的任何一种或多种方法。12 shows an illustration of a machine in an example form of a computing system 700 within which a set of instructions, when executed and/or processing logic when activated, may cause a machine to perform the processes described herein and/or or any one or more of the claimed methods. In alternative embodiments, the machines operate as stand-alone devices, or may be connected (eg, networked) to other machines. In a networked deployment, the machine may operate as a server or client machine in a server-client network environment, or as a peer machine in a peer-to-peer (or distributed) network environment. The machine may be a personal computer (PC), laptop computer, tablet computing system, personal digital assistant (PDA), cellular phone, smart phone, network application, set-top box (STB), network router, switch or bridge or capable of executing A set of instructions (sequential or out-of-order) or any machine that activates processing logic that specifies actions to be taken by the machine. Further, although only a single machine is illustrated, the term "machine" may also be understood to include any collection of machines that individually or jointly execute a set (or sets) of instructions or processing logic, the set (or sets) of or sets) of instructions or processing logic for performing any one or more of the methods described and/or claimed herein.
示例计算系统700可以包括数据处理器702(例如片上系统(SoC)、通用处理核心、图形核心以及可选地,其他处理逻辑)和存储器704,该数据处理器702和存储器704可以经由总线或其他数据传递系统706来彼此通信。移动计算系统700和/或移动通信系统700还可以包括各种输入/输出(I/O)设备和/或接口710,诸如触摸屏显示器、音频插孔、语音接口以及可选地,网络接口712。在示例实施例中,网络接口712可以包括一个或多个无线电收发器,该一个或多个无线电收发器被配置用于与任何一种或多种标准的无线和/或蜂窝协议或接入技术(例如用于蜂窝系统、全球移动通信系统(GSM)、通用分组无线业务(GPRS)、增强型数据GSM环境(EDGE)、宽带码分多址(WCDMA)、LTE、CDMA2000、WLAN、无线路由器(WR)网格等的第二代(2G)、2.5代、第三代(3G)、第四代(4G)和后代无线接入)的兼容性。网络接口712还可以配置用于与各种其他有线和/或无线通信协议一起使用,包括TCP/IP、UDP、SIP、SMS、RTP、WAP、CDMA、TDMA、UMTS、UWB、WiFi、WiMax、
存储器704可以表示机器可读介质,该机器可读介质上存储有体现本文所描述和/或要求保护的方法或功能中的任何一个或多个的一组或多组指令、软件、固件或其他处理逻辑(例如逻辑708)。在移动计算和/或通信系统700执行逻辑708或其一部分期间,逻辑708或其一部分还可以完全或至少部分地驻留在处理器702内。同样地,存储器704和处理器702还可以构成机器可读介质。逻辑708或其一部分还可以被配置为在硬件中部分地实施其至少一部分的处理逻辑或逻辑。还可以经由网络接口712来在网络714上传输或接收逻辑708或其一部分。虽然示例实施例中的机器可读介质可以是单种介质,但是术语“机器可读介质”应该被理解为包括存储一组或多组指令的单种非暂时性介质或多种非暂时性介质(例如集中式或分布式数据库和/或相关联的高速缓冲存储器和计算系统)。术语“机器可读介质”还可以被理解为包括任何非暂时性介质,这些任何非暂时性介质能够存储、编码或携带用于由机器执行并且使机器执行各个实施例中的任何一种或多种方法的一组指令,或者能够存储、编码或携带由这样一组指令利用或与这样一组指令相关联的数据结构。术语“机器可读介质”可以相应地被理解为包括但不限于:固态存储器、光学介质和磁介质。Memory 704 may represent a machine-readable medium having stored thereon one or more sets of instructions, software, firmware or other instructions embodying any one or more of the methods or functions described and/or claimed herein Processing logic (eg, logic 708).
可以使用以下基于条款的描述来捕获本文描述的一些实施例。Some embodiments described herein may be captured using the following clause-based description.
一种系统包括数据处理器以及可由数据处理器执行的自主车辆车轮检测系统,该自主车辆车轮检测系统被配置为执行自主车辆车轮检测操作。该自主车辆车轮检测操作被配置为:从训练图像数据收集系统接收训练图像数据;获得与训练图像数据对应的地面实况数据;执行训练阶段,以训练一个或多个分类器来处理训练图像数据中的图像,以在训练图像数据中的图像中检测车辆车轮对象;从与自主车辆相关联的图像数据收集系统接收操作图像数据;并且执行操作阶段,该操作阶段包括将训练过的一个或多个分类器应用于提取车轮对象数据。A system includes a data processor and an autonomous vehicle wheel detection system executable by the data processor, the autonomous vehicle wheel detection system configured to perform autonomous vehicle wheel detection operations. The autonomous vehicle wheel detection operation is configured to: receive training image data from a training image data collection system; obtain ground truth data corresponding to the training image data; perform a training phase to train one or more classifiers to process the data in the training image data to detect vehicle wheel objects in the images in the training image data; receive operational image data from an image data collection system associated with the autonomous vehicle; and perform an operational phase that includes one or more of the trained A classifier is applied to extract wheel object data.
根据条款1的系统,其中训练阶段被配置为从手动图像注释或标记过程获得地面实况数据。The system of
根据条款1的系统,还被配置为生成原始图像与地面实况相结合的混合可视化。The system according to
根据条款1的系统,还被配置为通过填充由提取的车辆车轮对象的轮廓限定的内部区域来生成地面实况。The system of
根据条款1的系统,还被配置为使用全卷积神经网络(FCN)作为机器学习模型。The system according to
根据条款1的系统,还被配置为使用全卷积神经网络(FCN)作为机器学习模型,该机器学习模型具有使用密集上采样卷积(DUC)的语义分割和使用混合扩张卷积(HDC)的语义分割。A system according to
根据条款1的系统,被配置为针对操作图像数据中的每个提取的车辆车轮对象生成对象级轮廓检测。A system according to
公开了一种方法,该方法用于:获得与训练图像数据对应的地面实况数据;执行训练阶段,以训练一个或多个分类器来处理训练图像数据中的图像,以在训练图像数据中的图像中检测车辆车轮对象;从与自主车辆相关联的图像数据收集系统接收操作图像数据;以及执行操作阶段,该操作阶段包括将训练过的一个或多个分类器应用于从操作图像数据提取车辆车轮对象,并且产生车辆车轮对象数据。A method is disclosed for: obtaining ground truth data corresponding to training image data; performing a training phase to train one or more classifiers to process images in the training image data to detecting vehicle wheel objects in an image; receiving operational image data from an image data collection system associated with the autonomous vehicle; and performing an operational phase that includes applying the trained one or more classifiers to extract the vehicle from the operational image data Wheel object, and generate vehicle wheel object data.
根据条款8的方法,其中训练阶段包括从手动图像注释或标记过程获得地面实况数据。A method according to clause 8, wherein the training phase includes obtaining ground truth data from a manual image annotation or labeling process.
根据条款8的方法,包括:生成原始图像与地面实况相结合的混合可视化。The method of clause 8, comprising: generating a hybrid visualization of the original image combined with the ground truth.
根据条款8的方法,包括:通过填充由提取的车辆车轮对象的轮廓限定的内部区域来生成地面实况。The method of clause 8, comprising generating a ground truth by filling in an interior area defined by the extracted contours of the vehicle wheel objects.
根据条款8的方法,包括:使用全卷积神经网络(FCN)作为机器学习模型。The method according to clause 8, comprising: using a fully convolutional neural network (FCN) as a machine learning model.
根据条款8的方法,包括:使用全卷积神经网络(FCN)作为机器学习模型,该机器学习模型具有使用密集上采样卷积(DUC)的语义分割和使用混合扩张卷积(HDC)的语义分割。A method according to clause 8, comprising: using a fully convolutional neural network (FCN) as a machine learning model with semantic segmentation using dense upsampling convolution (DUC) and semantics using hybrid dilated convolution (HDC) segmentation.
根据条款8的方法,包括:针对操作图像数据中的每个提取的车辆车轮对象生成对象级轮廓检测。The method of clause 8, comprising generating an object-level contour detection for each extracted vehicle wheel object in the operational image data.
一种非暂时性机器可用存储介质,该非暂时性机器可用存储介质采用指令,这些指令在由机器执行时使机器:从训练图像数据收集系统接收训练图像数据;获得与训练图像数据对应的地面实况数据;执行训练阶段,以训练一个或多个分类器来处理训练图像数据中的图像,以在训练图像数据中的图像中检测车辆车轮对象;从与自主车辆相关联的图像数据收集系统接收操作图像数据;并且执行操作阶段,该操作阶段包括将训练过的一个或多个分类器应用于从操作图像数据提取车辆车轮对象,并且产生车辆车轮对象数据。A non-transitory machine-usable storage medium employing instructions that, when executed by a machine, cause the machine to: receive training image data from a training image data collection system; obtain a ground surface corresponding to the training image data live data; performing a training phase to train one or more classifiers to process images in the training image data to detect vehicle wheel objects in the images in the training image data; received from an image data collection system associated with the autonomous vehicle operating on the image data; and performing an operating phase that includes applying the trained one or more classifiers to extract vehicle wheel objects from the operating image data, and generating vehicle wheel object data.
根据条款15的非暂时性机器可用存储介质,其中训练阶段被配置为从手动图像注释或标记过程获得地面实况数据。The non-transitory machine-usable storage medium of clause 15, wherein the training stage is configured to obtain ground truth data from a manual image annotation or labeling process.
根据条款15的非暂时性机器可用存储介质,还被配置为生成原始图像与地面实况相结合的混合可视化。The non-transitory machine-usable storage medium according to clause 15, further configured to generate a hybrid visualization of the original image combined with the ground truth.
根据条款15的非暂时性机器可用存储介质,还被配置为通过填充由提取的车辆车轮对象的轮廓限定的内部区域来生成地面实况。The non-transitory machine-usable storage medium according to clause 15, further configured to generate a ground truth by filling in an interior area defined by the extracted contours of the vehicle wheel objects.
根据条款15的非暂时性机器可用存储介质,还被配置为使用全卷积神经网络(FCN)作为机器学习模型。The non-transitory machine-usable storage medium according to clause 15, further configured to use a fully convolutional neural network (FCN) as a machine learning model.
根据条款15的非暂时性机器可用存储介质,还被配置为针对操作图像数据中的每个提取的车辆车轮对象生成对象级轮廓检测。The non-transitory machine-usable storage medium of clause 15, further configured to generate an object-level contour detection for each extracted vehicle wheel object in the operational image data.
本文中所公开的以及其他实施例、模块和功能操作可以被实施在数字电子电路系统中或计算机软件、固件或硬件(包括在本文中所公开的结构及其结构等效物)中或它们中的一个或多个的组合中。所公开的以及其他实施例可以被实施为一个或多个计算机程序产品,也就是说,编码在计算机可读介质上以由数据处理设备执行或以控制该数据处理设备的操作的计算机程序指令的一个或多个模块。机器可读介质可以是机器可读存储设备、机器可读存储基板、存储器设备、影响机器可读传播信号的物质组合或它们中的一个或多个的组合。术语“数据处理装置”囊括用于处理数据的所有装置、设备和机器,包括:例如可编程处理器、计算机或多个处理器或计算机。除了硬件之外,该装置还可以包括为探讨中的计算机程序创建执行环境的代码,例如构成处理器固件、协议栈、数据库管理系统、操作系统或它们中的一个或多个的组合的代码。传播信号是人工生成的信号,例如机器生成的电信号、光信号或电磁信号,生成该信号以对要传输至合适的接收器装置的信息进行编码。The and other embodiments, modules and functional operations disclosed herein may be implemented in digital electronic circuitry or in computer software, firmware or hardware (including the structures disclosed herein and their structural equivalents) or in them in one or more combinations. The disclosed and other embodiments may be implemented as one or more computer program products, that is, computer program instructions encoded on a computer-readable medium for execution by or to control the operation of a data processing apparatus. one or more modules. The machine-readable medium may be a machine-readable storage device, a machine-readable storage substrate, a memory device, a combination of matter that affects a machine-readable propagated signal, or a combination of one or more thereof. The term "data processing apparatus" encompasses all apparatus, devices and machines for processing data, including, for example, a programmable processor, a computer, or multiple processors or computers. In addition to hardware, the apparatus may include code that creates an execution environment for the computer program in question, such as code constituting processor firmware, protocol stacks, database management systems, operating systems, or a combination of one or more of these. A propagated signal is an artificially generated signal, such as a machine-generated electrical, optical or electromagnetic signal, which is generated to encode information for transmission to a suitable receiver device.
可以按照任何形式的编程语言来写入计算机程序(也被称为程序、软件、软件应用、脚本或代码),包括编译语言或解释语言,并且可以按照任何形式来部署计算机程序,包括部署为独立程序或部署为模块、部件、子例程或适合于在计算环境中使用的另一单元。计算机程序不一定与文件系统中的文件对应。程序可以被存储在保持其他程序或数据(例如被存储在标记语言文档中的一个或多个脚本)的文件的一部分中、专用于探讨中的程序的单个文件中或多个协作文件(例如存储一个或多个模块、子程序或部分代码的文件)中。计算机程序可以被部署为在一个计算机上被执行或在位于一个站点处或分布在多个站点中并且通过通信网络互相连接的多个计算机上被执行。Computer programs (also referred to as programs, software, software applications, scripts, or code) may be written in any form of programming language, including compiled or interpreted languages, and may be deployed in any form, including as a stand-alone A program is either deployed as a module, component, subroutine, or another unit suitable for use in a computing environment. Computer programs do not necessarily correspond to files in the file system. Programs may be stored in a portion of a file that holds other programs or data (such as one or more scripts stored in a markup language document), in a single file dedicated to the program in question, or in multiple collaborative files (such as storing one or more modules, subroutines, or part of code files). A computer program can be deployed to be executed on one computer or on multiple computers located at one site or distributed among multiple sites and interconnected by a communication network.
在本文中所描述的过程和逻辑流程可以由一个或多个可编程处理器执行,该一个或多个可编程处理器执行一个或多个计算机程序以通过操作输入数据并且生成输出来执行功能。过程和逻辑流程还可以由专用逻辑电路系统(例如FPGA(现场可编程门阵列)或ASIC(专用集成电路))执行,并且装置还可以被实施为专用逻辑电路系统(例如FPGA(现场编程门阵列)或ASIC(专用集成电路))。适合于执行计算机程序的处理器包括:例如通用微处理器和专用微处理器以及任何种类的数字计算机的任何一个或多个处理器。一般而言,处理器将接收来自只读存储器或随机存取存储器或两者的指令和数据。计算机的必要元件是:用于执行指令的处理器和用于存储指令和数据的一个或多个存储器设备。一般而言,计算机还将包括用于存储数据的一个或多个海量存储设备(例如磁盘、磁光盘或光盘),或者计算机可以被操作地耦合以接收来自该海量存储设备的数据或将数据传递给该海量存储设备或者进行两者。然而,计算机不需要具有这种设备。适合于存储计算机程序指令和数据的计算机可读介质包括所有形式的非易失性存储器、介质和存储器设备,包括:例如半导体存储器设备(例如EPROM、EEPROM和闪速存储器设备);磁盘(例如内部硬盘或可移动盘);磁光盘;以及CD-ROM盘和DVD-ROM盘。处理器和存储器可以由专用逻辑电路系统补充或可以被并入该专用逻辑电路系统中。The processes and logic flows described herein can be performed by one or more programmable processors executing one or more computer programs to perform functions by operating on input data and generating output. The processes and logic flows can also be performed by, and apparatus can also be implemented as, special purpose logic circuitry, such as an FPGA (field programmable gate array) or an ASIC (application-specific integrated circuit), such as an FPGA (field programmable gate array). ) or ASIC (Application Specific Integrated Circuit)). Processors suitable for the execution of a computer program include, by way of example, both general and special purpose microprocessors, and any one or more processors of any kind of digital computer. In general, a processor will receive instructions and data from read-only memory or random access memory, or both. The essential elements of a computer are: a processor for executing instructions and one or more memory devices for storing instructions and data. In general, a computer will also include one or more mass storage devices (eg, magnetic, magneto-optical or optical disks) for storing data, or the computer can be operatively coupled to receive data from or transfer data from the mass storage devices Give that mass storage device or do both. However, a computer need not have such a device. Computer-readable media suitable for storage of computer program instructions and data include all forms of non-volatile memory, media, and memory devices, including, for example, semiconductor memory devices (such as EPROM, EEPROM, and flash memory devices); magnetic disks (such as internal hard disk or removable disk); magneto-optical disks; and CD-ROM disks and DVD-ROM disks. The processor and memory may be supplemented by or incorporated in special purpose logic circuitry.
虽然本专利文件包括许多细节,但是这些细节不应该被解释为对任何发明或可能要求保护的内容的范围的限制,而是作为对可以特定于特定发明的特定实施例的特征的描述。在本专利文件中在单独的实施例的语境中描述的某些特征也可以被组合地实施在单个实施例中。相反,在单个实施例的语境下描述的各种特征也可以单独地或按照任何合适的子组合被实施在多个实施例中。此外,虽然上文可能将特征描述为以某些组合来起作用并且最初甚至同样地对该特征进行了要求,但是在一些情况下,可以从组合中删除来自所要求的组合的一个或多个特征。并且所要求的组合可以指向子组合或子组合的变化。Although this patent document contains many details, these should not be construed as limitations on the scope of any invention or what may be claimed, but as descriptions of features that may be specific to particular embodiments of particular inventions. Certain features that are described in this patent document in the context of separate embodiments can also be implemented in combination in a single embodiment. Conversely, various features that are described in the context of a single embodiment can also be implemented in multiple embodiments separately or in any suitable subcombination. Furthermore, although features may be described above as functioning in certain combinations and initially even claimed as such, in some cases one or more of the claimed combinations may be deleted from the combinations feature. And the required combination can point to a sub-combination or a variation of the sub-combination.
类似地,虽然在附图中按照特定顺序示出了操作,但是不应该将其理解为需要按照所示的特定顺序或者按照相继的顺序来进行这种操作,或者需要进行所有图示的操作以实现期望的结果。此外,在本专利文件中所描述的实施例中的各种系统部件的分离不应该被理解为在所有实施例中都需要这种分离。Similarly, although operations are shown in the figures in a particular order, this should not be construed as requiring that such operations be performed in the particular order shown or in a sequential order, or that all illustrated operations are required to be performed in order to achieve the desired result. Furthermore, the separation of various system components in the embodiments described in this patent document should not be construed as requiring such separation in all embodiments.
仅描述了一些实施方式和示例,并且可以基于在本专利文件中描述的和说明的内容来做出其他实施方式、增强和变化。Only a few embodiments and examples have been described, and other embodiments, enhancements and changes can be made based on what is described and illustrated in this patent document.
对本文所描述的实施例的说明旨在提供对各种实施例的结构的一般理解,并且它们不旨在用作对可能利用本文所描述的结构的部件和系统的所有要素和特征的完整描述。对于本领域的普通技术人员而言,在回顾上面所提供的描述之后,许多其他实施例将是清楚的。可以利用和导出其他实施例,使得在不偏离本公开的范围的情况下,可以进行结构和逻辑替换和改变。本文中的图仅仅是代表性的,并且可以不按比例来绘制。图的某些比例可以被扩大,而其他比例可以被最小化。因此,本说明书和附图应该被认为是说明性的,而不是限制性的。The descriptions of the embodiments described herein are intended to provide a general understanding of the structure of the various embodiments, and they are not intended to serve as a complete description of all elements and features of components and systems that may utilize the structures described herein. Many other embodiments will be apparent to those of ordinary skill in the art upon reviewing the description provided above. Other embodiments may be utilized and derived, such that structural and logical substitutions and changes may be made without departing from the scope of the present disclosure. The figures herein are representative only and may not be drawn to scale. Certain scales of the graph can be exaggerated, while other scales can be minimized. Accordingly, the specification and drawings are to be regarded in an illustrative rather than a restrictive sense.
一些实施例在两个或更多个特定的互连硬件模块或设备中实施功能,其中在模块之间并且通过模块传送相关的控制和数据信号,或者作为专用集成电路的部分。因此,示例系统适用于软件实施方式、固件实施方式和硬件实施方式。Some embodiments implement functions in two or more specific interconnected hardware modules or devices, with related control and data signals communicated between and through the modules, or as part of an application specific integrated circuit. Accordingly, the example system is applicable to software implementations, firmware implementations, and hardware implementations.
提供本公开的摘要,以使读者快速地确定本技术公开的性质。提交摘要进行以下理解:摘要将不被用于解释或限制权利要求书的范围或含义。另外,在前面的具体实施方式中,可以了解到:为了使本公开简单化,在单个实施例中将各种特征分组在一起。公开中的该方法不应该被解释为反映了以下意图:所要求保护的实施例需要比在每项权利要求中明确叙述的特征更多的特征。相反,如所附权利要求书反映的,发明主题在于少于单个所公开的实施例的所有特征。因此,所附权利要求书以此方式并入具体实施方式,其中每项权利要求独立地作为单独的实施例。The Abstract of the Disclosure is provided to enable the reader to quickly ascertain the nature of the technical disclosure. The abstract is submitted with the understanding that it will not be used to interpret or limit the scope or meaning of the claims. In addition, in the foregoing Detailed Description, it can be appreciated that various features are grouped together in a single embodiment for the purpose of streamlining the disclosure. This approach in the disclosure should not be construed as reflecting an intention that the claimed embodiments require more features than are expressly recited in each claim. Rather, as the following claims reflect, inventive subject matter lies in less than all features of a single disclosed embodiment. Thus, the following claims are hereby incorporated into the Detailed Description, with each claim standing on its own as a separate embodiment.
虽然前述内容针对本公开的实施方式,但是在不偏离本公开的基本范围的情况下,可以设计本公开的其他以及进一步的实施方式,并且本公开的范围由所附权利要求书确定。While the foregoing has been directed to embodiments of the present disclosure, other and further embodiments of the present disclosure may be devised without departing from the essential scope of the present disclosure, and the scope of the present disclosure is to be determined by the appended claims.
Claims (20)
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202210931196.0A CN115331198A (en) | 2018-03-09 | 2019-03-08 | System and method for vehicle wheel detection |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US15/917,331 | 2018-03-09 | ||
| US15/917,331 US10671873B2 (en) | 2017-03-10 | 2018-03-09 | System and method for vehicle wheel detection |
| PCT/US2019/021478 WO2019190726A1 (en) | 2018-03-09 | 2019-03-08 | System and method for vehicle wheel detection |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202210931196.0A Division CN115331198A (en) | 2018-03-09 | 2019-03-08 | System and method for vehicle wheel detection |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN111837163A true CN111837163A (en) | 2020-10-27 |
| CN111837163B CN111837163B (en) | 2022-08-23 |
Family
ID=68060692
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201980017911.6A Active CN111837163B (en) | 2018-03-09 | 2019-03-08 | System and method for vehicle wheel detection |
| CN202210931196.0A Pending CN115331198A (en) | 2018-03-09 | 2019-03-08 | System and method for vehicle wheel detection |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202210931196.0A Pending CN115331198A (en) | 2018-03-09 | 2019-03-08 | System and method for vehicle wheel detection |
Country Status (4)
| Country | Link |
|---|---|
| EP (1) | EP3762903A4 (en) |
| CN (2) | CN111837163B (en) |
| AU (2) | AU2019241892B2 (en) |
| WO (1) | WO2019190726A1 (en) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113590980A (en) * | 2021-07-20 | 2021-11-02 | 北京地平线机器人技术研发有限公司 | Method for training neural network, method and device for predicting track |
| CN113963061A (en) * | 2021-10-29 | 2022-01-21 | 广州文远知行科技有限公司 | Road edge distribution information acquisition method and device, electronic equipment and storage medium |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114365151A (en) * | 2019-10-22 | 2022-04-15 | 深圳鲲云信息科技有限公司 | Neural network model transformation method, device, server and storage medium |
| US11210533B1 (en) * | 2020-08-09 | 2021-12-28 | Phantom AI, Inc. | Method of predicting trajectory of vehicle |
| CN113223045B (en) * | 2021-05-19 | 2024-06-11 | 北京数研科技发展有限公司 | Vision and IMU sensor fusion positioning system based on dynamic object semantic segmentation |
Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103794056A (en) * | 2014-03-06 | 2014-05-14 | 北京卓视智通科技有限责任公司 | Vehicle type accurate classification system and method based on real-time double-line video stream |
| CN105118044A (en) * | 2015-06-16 | 2015-12-02 | 华南理工大学 | Method for automatically detecting defects of wheel-shaped cast product |
| CN105976392A (en) * | 2016-05-30 | 2016-09-28 | 北京智芯原动科技有限公司 | Maximum-output-probability-based vehicle tyre detection method and apparatus |
| CN106250838A (en) * | 2016-07-27 | 2016-12-21 | 乐视控股(北京)有限公司 | vehicle identification method and system |
| US20170053538A1 (en) * | 2014-03-18 | 2017-02-23 | Sri International | Real-time system for multi-modal 3d geospatial mapping, object recognition, scene annotation and analytics |
| US20170206418A1 (en) * | 2014-12-16 | 2017-07-20 | Irobot Corporation | Systems and Methods for Capturing Images and Annotating the Captured Images with Information |
| CN107292291A (en) * | 2017-07-19 | 2017-10-24 | 北京智芯原动科技有限公司 | A kind of vehicle identification method and system |
| CN107346437A (en) * | 2017-07-03 | 2017-11-14 | 大连理工大学 | The extraction method of body side view parameter model |
| US20170351261A1 (en) * | 2015-11-04 | 2017-12-07 | Zoox, Inc. | Sensor-Based Object-Detection Optimization For Autonomous Vehicles |
| CN107577988A (en) * | 2017-08-03 | 2018-01-12 | 东软集团股份有限公司 | Realize the method, apparatus and storage medium, program product of side vehicle location |
-
2019
- 2019-03-08 CN CN201980017911.6A patent/CN111837163B/en active Active
- 2019-03-08 WO PCT/US2019/021478 patent/WO2019190726A1/en not_active Ceased
- 2019-03-08 AU AU2019241892A patent/AU2019241892B2/en not_active Ceased
- 2019-03-08 EP EP19774547.4A patent/EP3762903A4/en not_active Withdrawn
- 2019-03-08 CN CN202210931196.0A patent/CN115331198A/en active Pending
-
2024
- 2024-06-26 AU AU2024204394A patent/AU2024204394A1/en not_active Abandoned
Patent Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103794056A (en) * | 2014-03-06 | 2014-05-14 | 北京卓视智通科技有限责任公司 | Vehicle type accurate classification system and method based on real-time double-line video stream |
| US20170053538A1 (en) * | 2014-03-18 | 2017-02-23 | Sri International | Real-time system for multi-modal 3d geospatial mapping, object recognition, scene annotation and analytics |
| US20170206418A1 (en) * | 2014-12-16 | 2017-07-20 | Irobot Corporation | Systems and Methods for Capturing Images and Annotating the Captured Images with Information |
| CN105118044A (en) * | 2015-06-16 | 2015-12-02 | 华南理工大学 | Method for automatically detecting defects of wheel-shaped cast product |
| US20170351261A1 (en) * | 2015-11-04 | 2017-12-07 | Zoox, Inc. | Sensor-Based Object-Detection Optimization For Autonomous Vehicles |
| CN105976392A (en) * | 2016-05-30 | 2016-09-28 | 北京智芯原动科技有限公司 | Maximum-output-probability-based vehicle tyre detection method and apparatus |
| CN106250838A (en) * | 2016-07-27 | 2016-12-21 | 乐视控股(北京)有限公司 | vehicle identification method and system |
| CN107346437A (en) * | 2017-07-03 | 2017-11-14 | 大连理工大学 | The extraction method of body side view parameter model |
| CN107292291A (en) * | 2017-07-19 | 2017-10-24 | 北京智芯原动科技有限公司 | A kind of vehicle identification method and system |
| CN107577988A (en) * | 2017-08-03 | 2018-01-12 | 东软集团股份有限公司 | Realize the method, apparatus and storage medium, program product of side vehicle location |
Non-Patent Citations (2)
| Title |
|---|
| 孙维广: "一种基于图像的车轮检测方法研究", 《科技资讯》 * |
| 胡顾飞等: "基于Adaboost算法的车辆轮胎检测研究与实现", 《计算机技术 与发展》 * |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113590980A (en) * | 2021-07-20 | 2021-11-02 | 北京地平线机器人技术研发有限公司 | Method for training neural network, method and device for predicting track |
| CN113590980B (en) * | 2021-07-20 | 2024-03-29 | 北京地平线机器人技术研发有限公司 | Method for training neural network, method and device for predicting track |
| CN113963061A (en) * | 2021-10-29 | 2022-01-21 | 广州文远知行科技有限公司 | Road edge distribution information acquisition method and device, electronic equipment and storage medium |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3762903A4 (en) | 2021-12-08 |
| AU2024204394A1 (en) | 2024-07-18 |
| WO2019190726A1 (en) | 2019-10-03 |
| AU2019241892B2 (en) | 2024-03-28 |
| CN115331198A (en) | 2022-11-11 |
| EP3762903A1 (en) | 2021-01-13 |
| AU2019241892A1 (en) | 2020-10-08 |
| CN111837163B (en) | 2022-08-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11967140B2 (en) | System and method for vehicle wheel detection | |
| US12552375B2 (en) | System and method for vehicle occlusion detection | |
| US12073324B2 (en) | System and method for vehicle taillight state recognition | |
| US10311312B2 (en) | System and method for vehicle occlusion detection | |
| US11580754B2 (en) | System and method for large-scale lane marking detection using multimodal sensor data | |
| CN110753934B (en) | Systems and methods for actively selecting and labeling images for semantic segmentation | |
| CN111373458B (en) | Prediction-based system and method for trajectory planning of autonomous vehicles | |
| US10528823B2 (en) | System and method for large-scale lane marking detection using multimodal sensor data | |
| CN111837163B (en) | System and method for vehicle wheel detection | |
| CN112272844B (en) | Systems and methods for neighboring vehicle intent prediction for autonomous vehicles |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant | ||
| CP03 | Change of name, title or address |
Address after: California, USA Patentee after: ORIGINAL GENERATION Co.,Ltd. Country or region after: U.S.A. Address before: California, USA Patentee before: Tucson Ltd. Country or region before: U.S.A. |
|
| CP03 | Change of name, title or address |